 返回首页
返回首页
 回到顶部
回到顶部
10.8
【目标心愿】
刚刚暑假的时候,在社区论坛里看到老师作品中出现桌面宠物小狗后,心中种下了种子。
可是当时这块知识是一片空白,代码看不懂一点,小智也是刚刚接触。
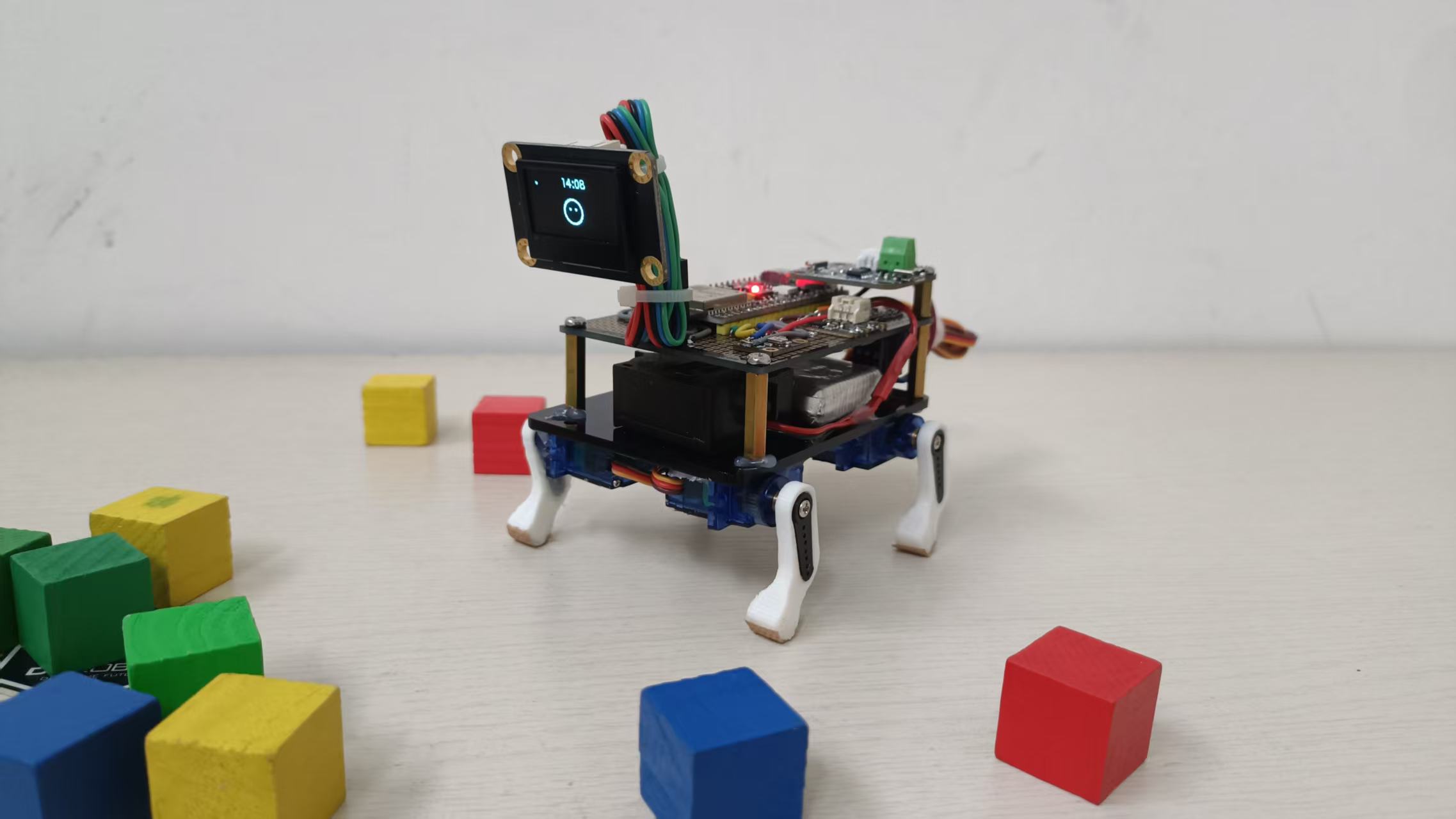
这个想法一直引导着我学习与积累,在国庆假期的后半段,终于实现了这一个愿望,虽然它还是很丑,动作慢悠悠的,不过已经接近梦想中的样子了。
它有小智AI的智慧,还有4足小狗的可爱。
不过有一点点不太习惯,经过几天对话互动,这个小智都适应了对话+动作,我心里却有一点不适应,一个可爱的女声和小狗狗外形的结合。
在制作过程中,最大的支持来自B站@闪电蘑菇老师的开源资料及视频讲解。

这个假期中的几个小项目主要来自@闪电大佬的开源资料。
详细的代码原理讲解在上面的视频链接中。
跟着老师,从一个舵机开始学习,然后尝试两个360舵机,再到2个180舵机,再到本项目中的4个舵机,和小智AI一起度过这个宅家的国庆假期。
上面三个项目都把小智自然语音自由控制舵机迁移到了K10小智上,K10的P0、P1接口可以支持两个舵机。
然而小狗狗要4个舵机,所以我在这个项目中用回了ESP32S3主控板,它可以支持很多舵机的。
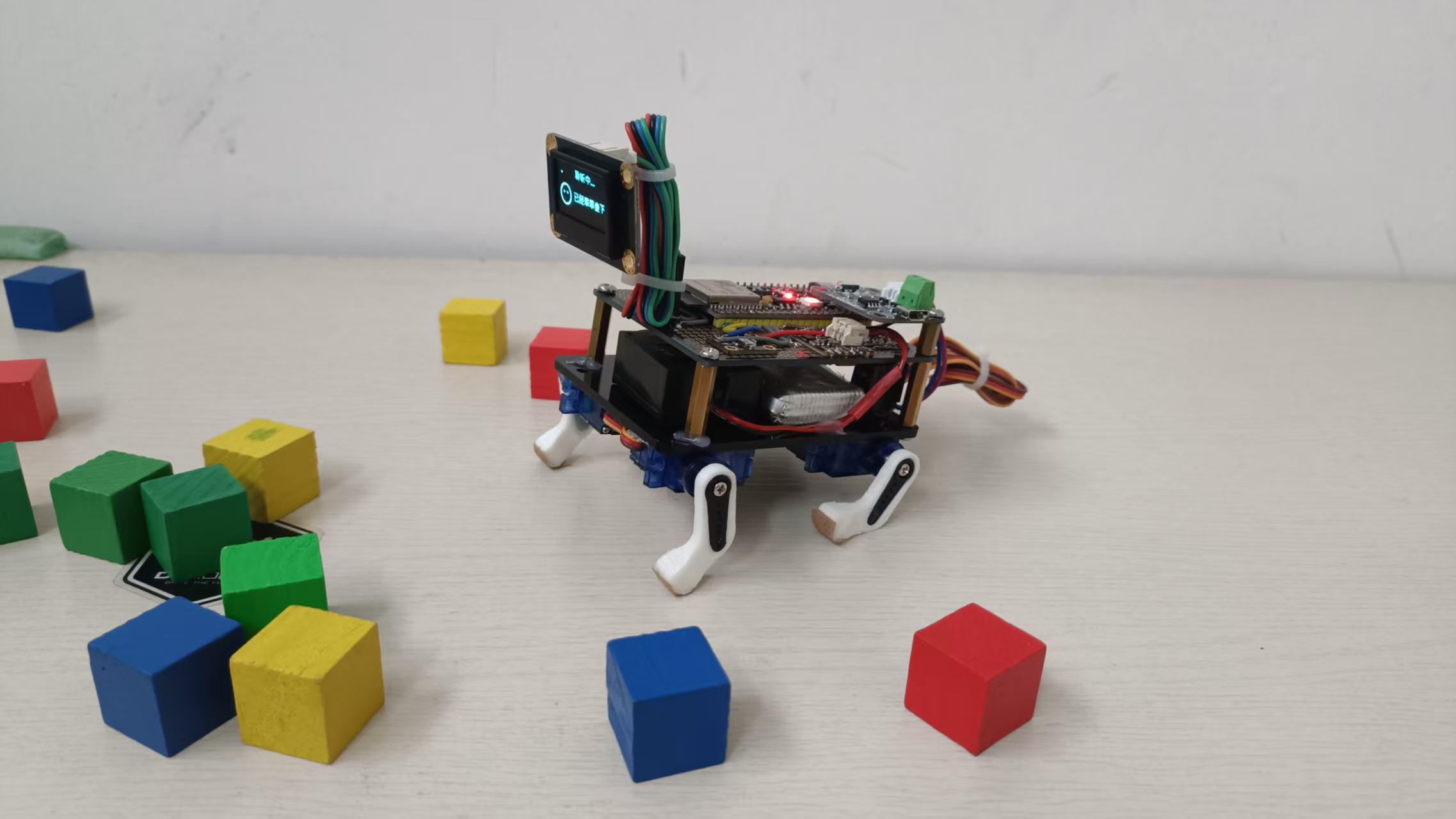
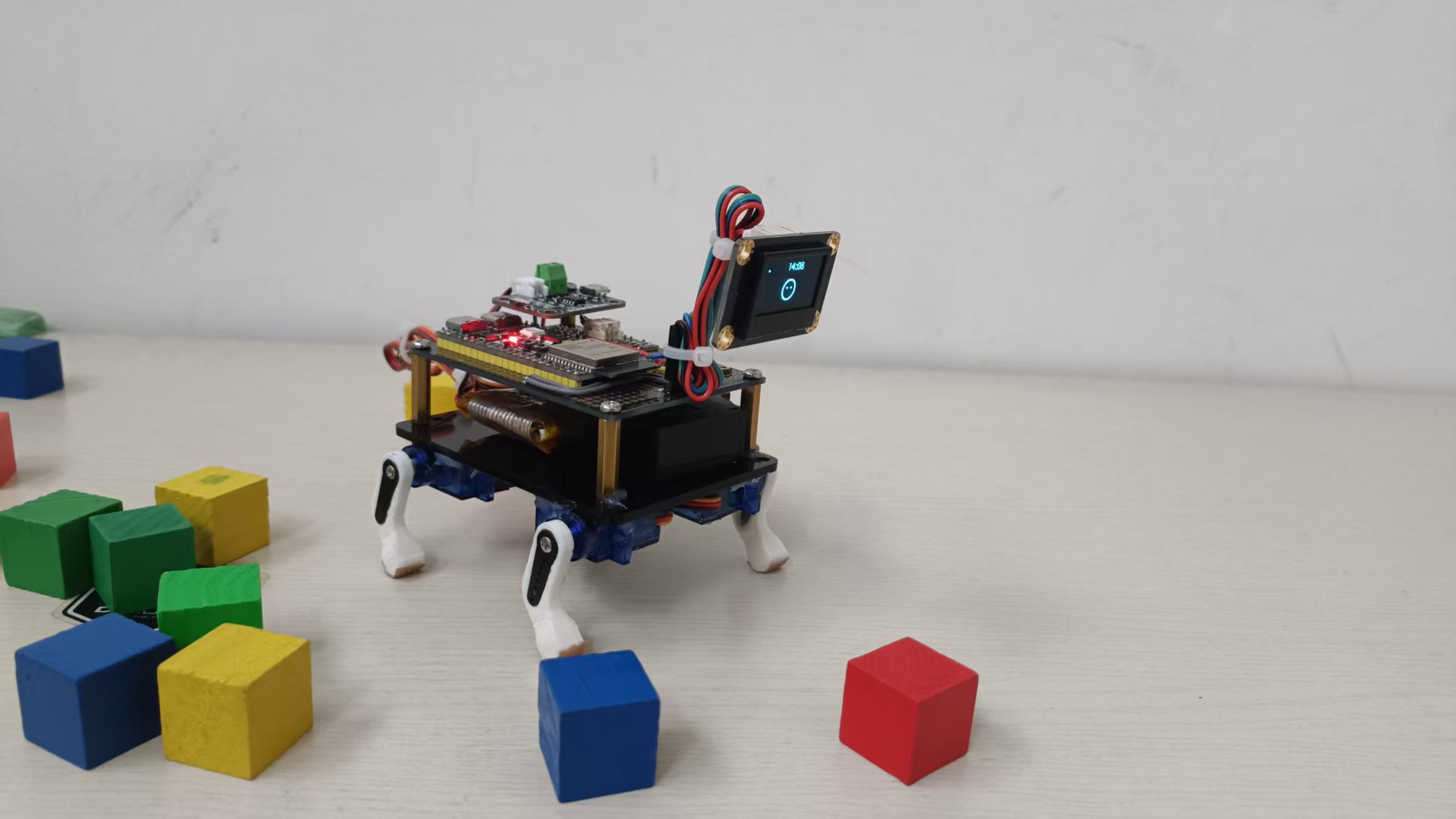
先给出一段测试视频,代码还可以再优化,动作还可以再增加,不过这算是第一个稳定的版本,先开源出来,大家可以继续优化:
步骤1 闪电老师小智AI舵机版源码下载与学习
@闪电蘑菇老师开源的教程资料:
## 增加舵机小智AI为1.8.1版本源码地址
github: https://github.com/shenjingnan/xiaozhi-esp32/tree/main/main/boards/bread-compact-wifi-with-servo
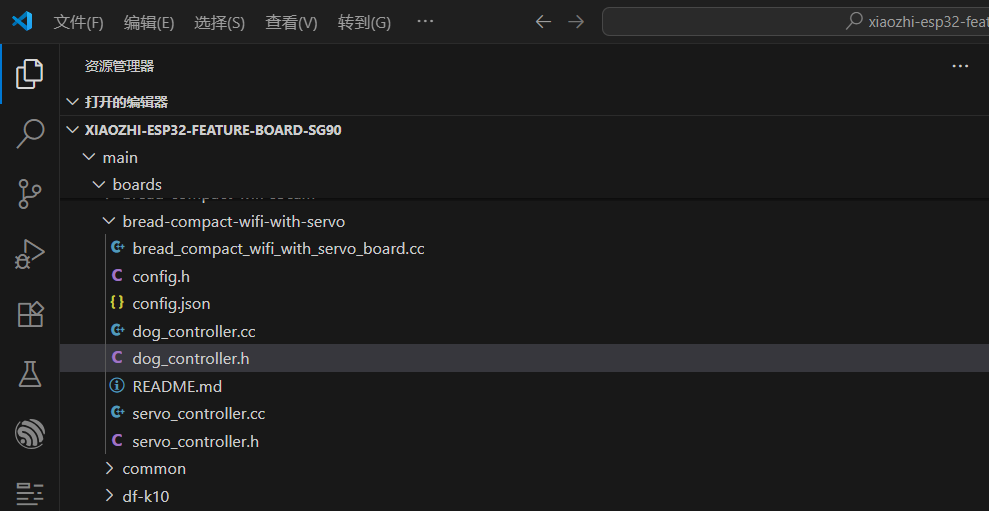
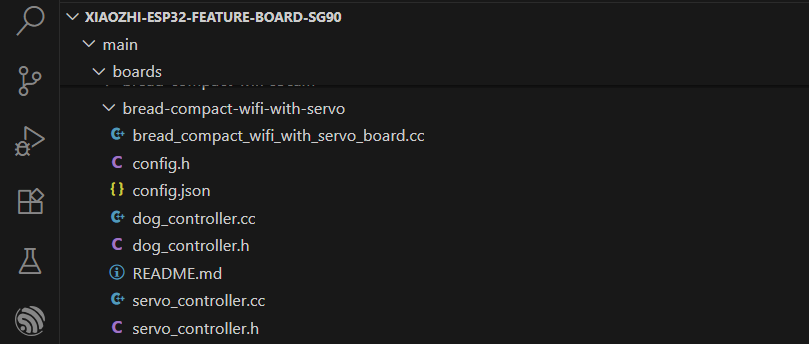
下载上面链接中小智AI源码xiaozhi-esp32-feature-board-sg90。
在VSCode中打开xiaozhi-esp32-feature-board-sg90文件夹学习闪电老师视频后对代码进行修改(图片中我已修改成小狗的了)。
小智源码修改后要配置、编译、烧录、测试。
环境安装:Windows搭建 ESP IDF 5.4.1开发环境以及编译小智
配置编辑器时选择如下。
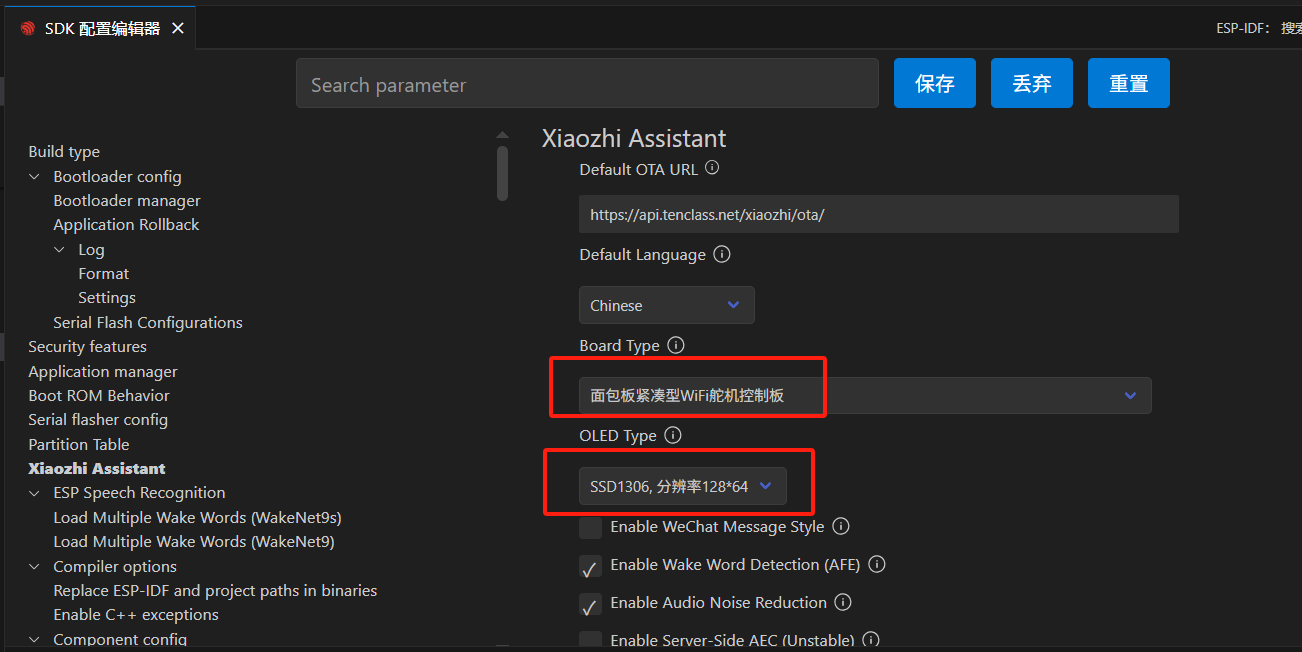
编译中如果报错,自己看不明白可以寻求AI帮助。
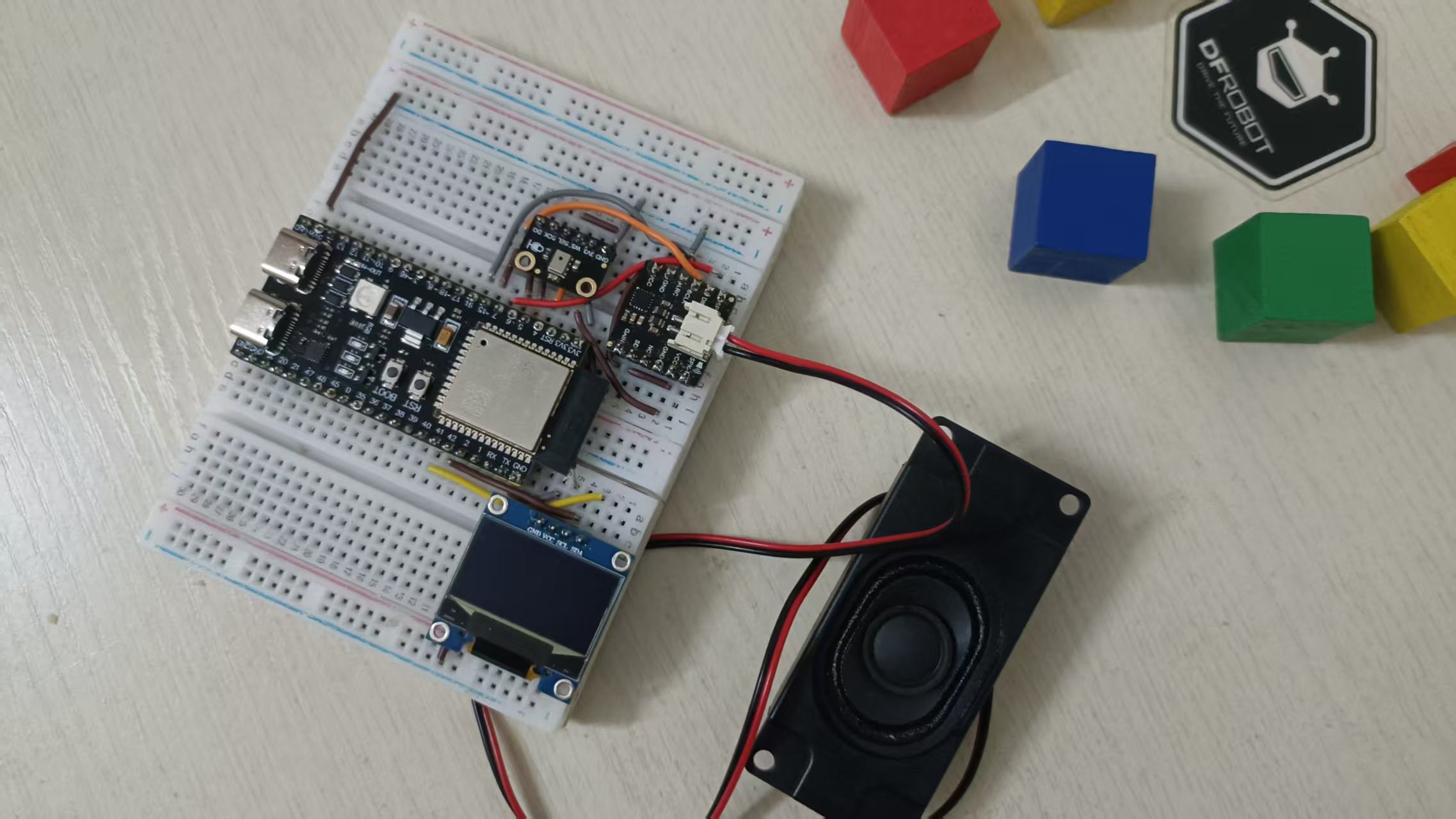
步骤2 面包板小智AI+4舵机做成桌面宠物原型
1、参考官方图纸搭建面包板小智
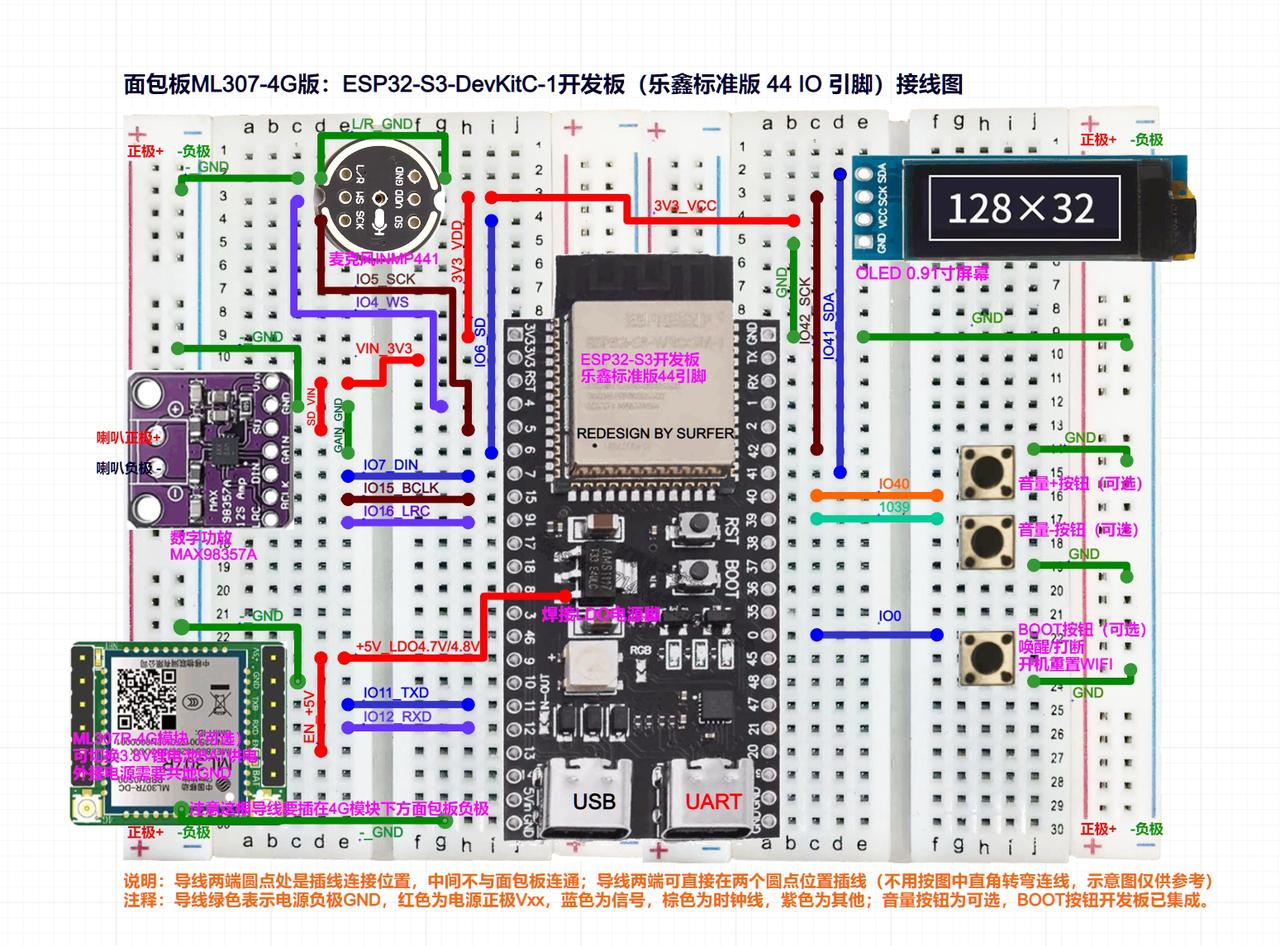 我的麦克风和数字功放用的是DF出的,标注稍有不同。(我手上只有DF的麦克风和功放模块,你用X宝上虾哥推荐的同样可行。)
我的麦克风和数字功放用的是DF出的,标注稍有不同。(我手上只有DF的麦克风和功放模块,你用X宝上虾哥推荐的同样可行。)
 组装完成后,烧录固件,重启、配网、保证小智成功运行。关于小智的内容可以到小智官网查看。(我在项目中用到了DF的0.96 OLED屏,用X宝中虾哥推荐的0.96 OLED屏也是可以的。)
组装完成后,烧录固件,重启、配网、保证小智成功运行。关于小智的内容可以到小智官网查看。(我在项目中用到了DF的0.96 OLED屏,用X宝中虾哥推荐的0.96 OLED屏也是可以的。)
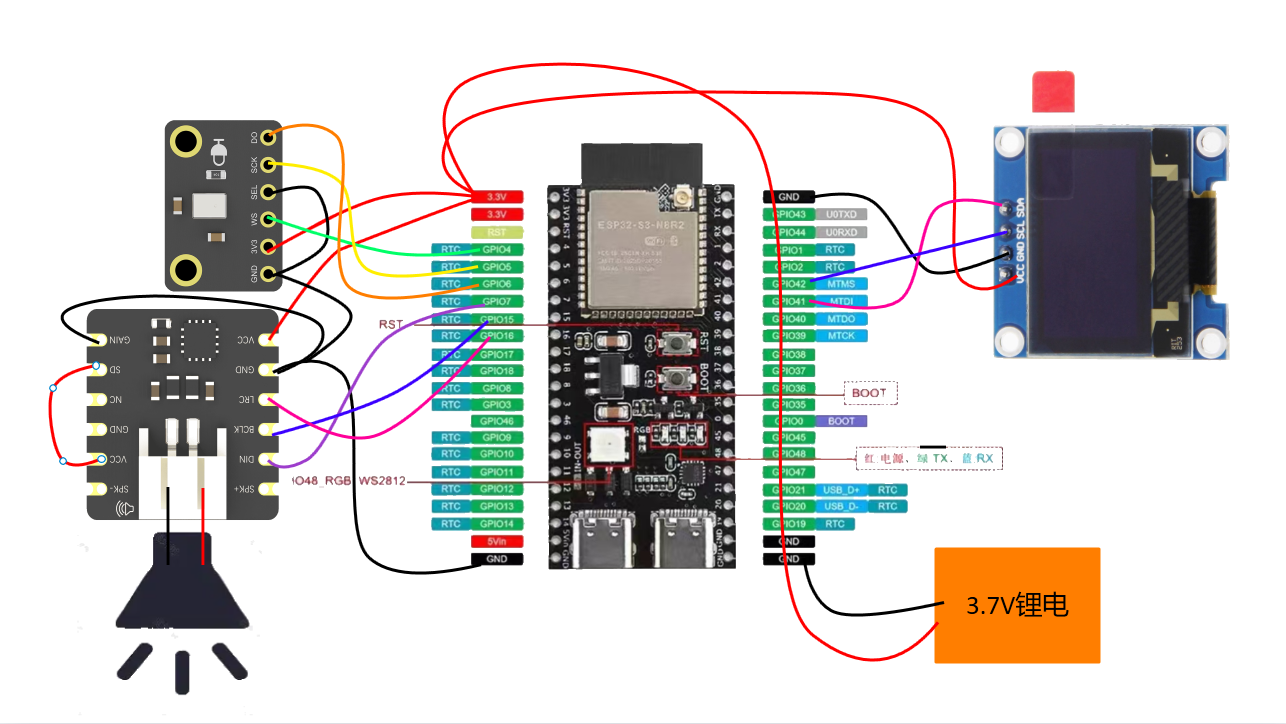
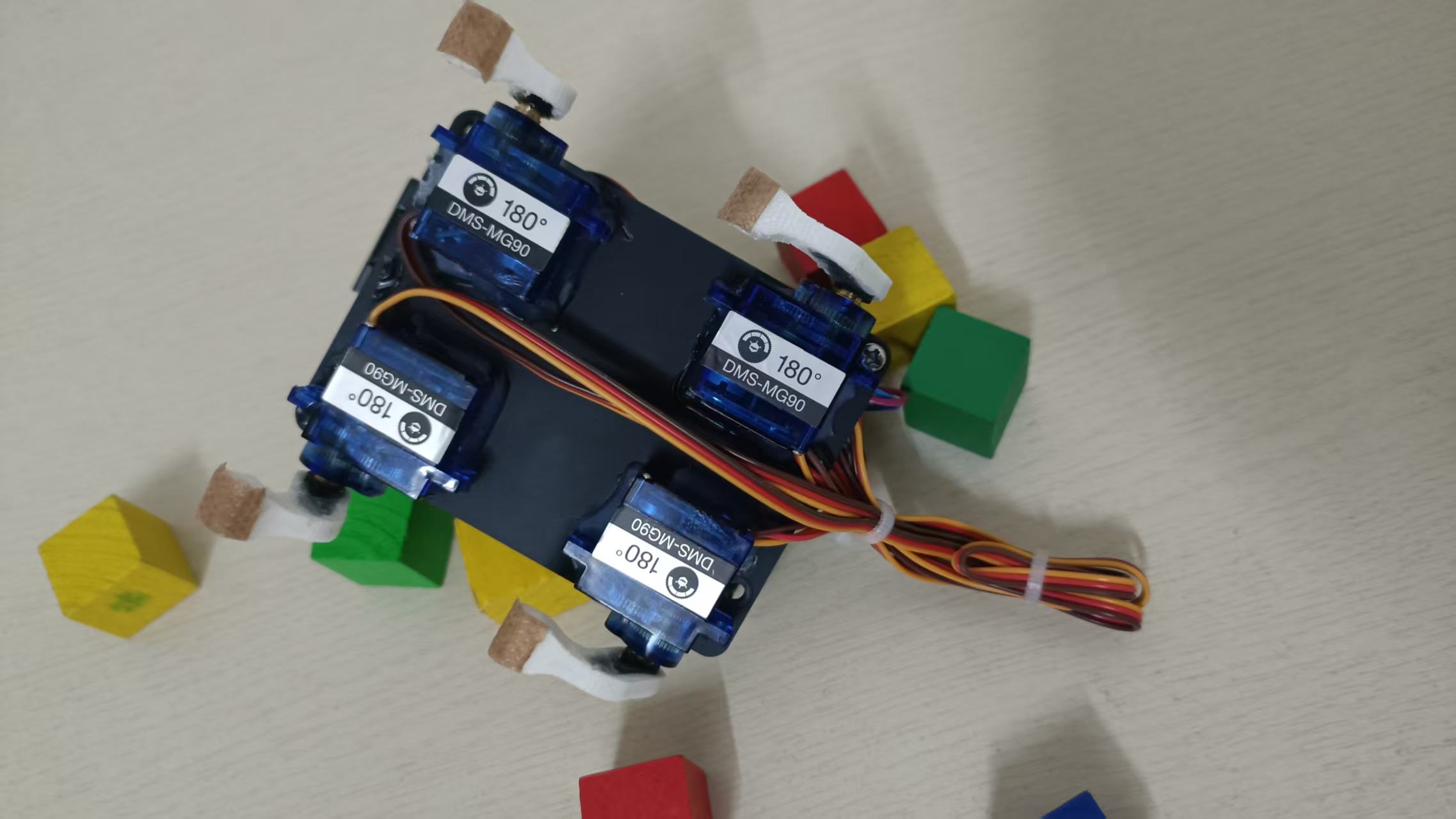
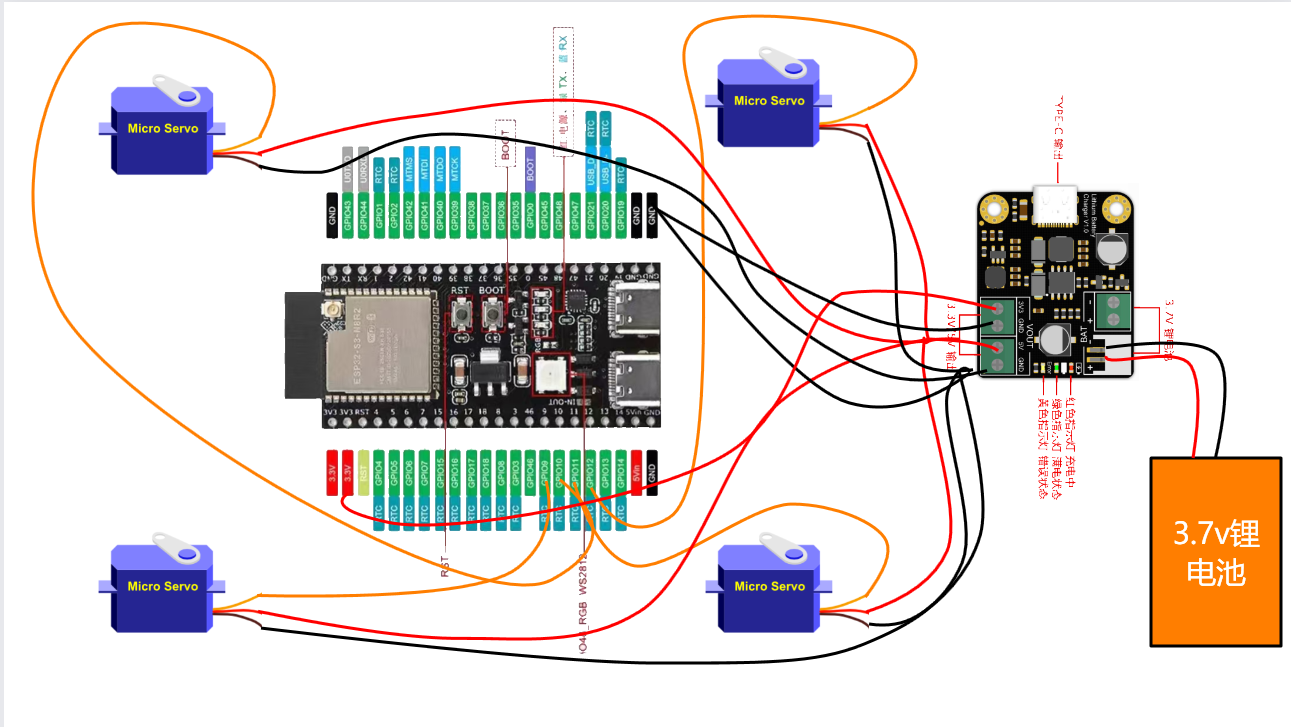
 2、4个舵机组装到小狗身体上,舵机单独供电,信号线接入小智GPIO口,舵机与小智开发板共地。
2、4个舵机组装到小狗身体上,舵机单独供电,信号线接入小智GPIO口,舵机与小智开发板共地。
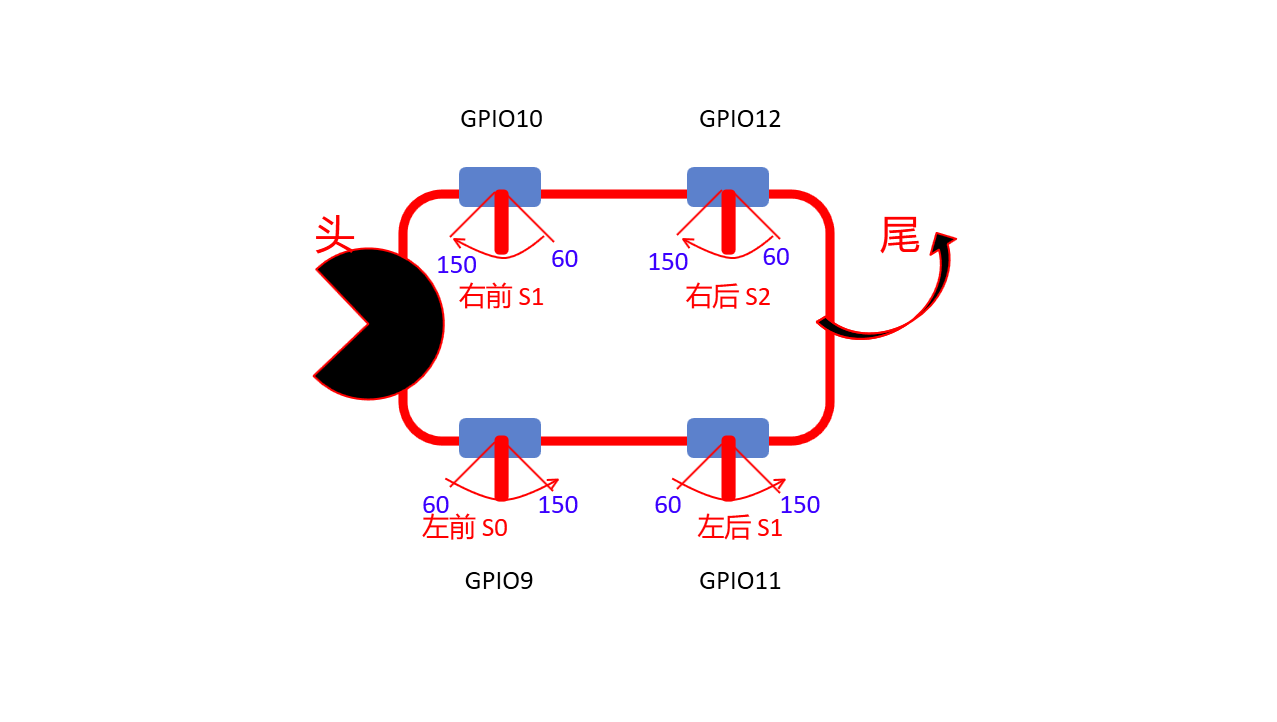
我的小狗狗4舵机与ESP32 S3 GPIO口对应如下图。(原型机没有拍照)
引脚:GPIO9(左前), GPIO10(右前), GPIO11(左后), GPIO12(右后)
(我的舵机引脚接法怪怪的,你可以修改对应引脚,当然下面文件1硬件配置代码中舵机引脚也要改下。)
 代码修改初步调试都在原型机上进行。
代码修改初步调试都在原型机上进行。
 小狗狗身体用的还是K10+扩展板制作语音控制的四足桌面宠物小狗(MIND+图形化和Arduino IDE代码)- Makelog(造物记)项目中的行空板K10扩展板的亚克力底板,尺寸:65 * 88mm,没进行3D建模,用胶枪大法固定。
小狗狗身体用的还是K10+扩展板制作语音控制的四足桌面宠物小狗(MIND+图形化和Arduino IDE代码)- Makelog(造物记)项目中的行空板K10扩展板的亚克力底板,尺寸:65 * 88mm,没进行3D建模,用胶枪大法固定。

3、调试初步满意后开始焊接洞洞板小智,组装小狗狗(过程没有拍照记录,因为是小白,所以过程相当曲折,好在成功完成了)。
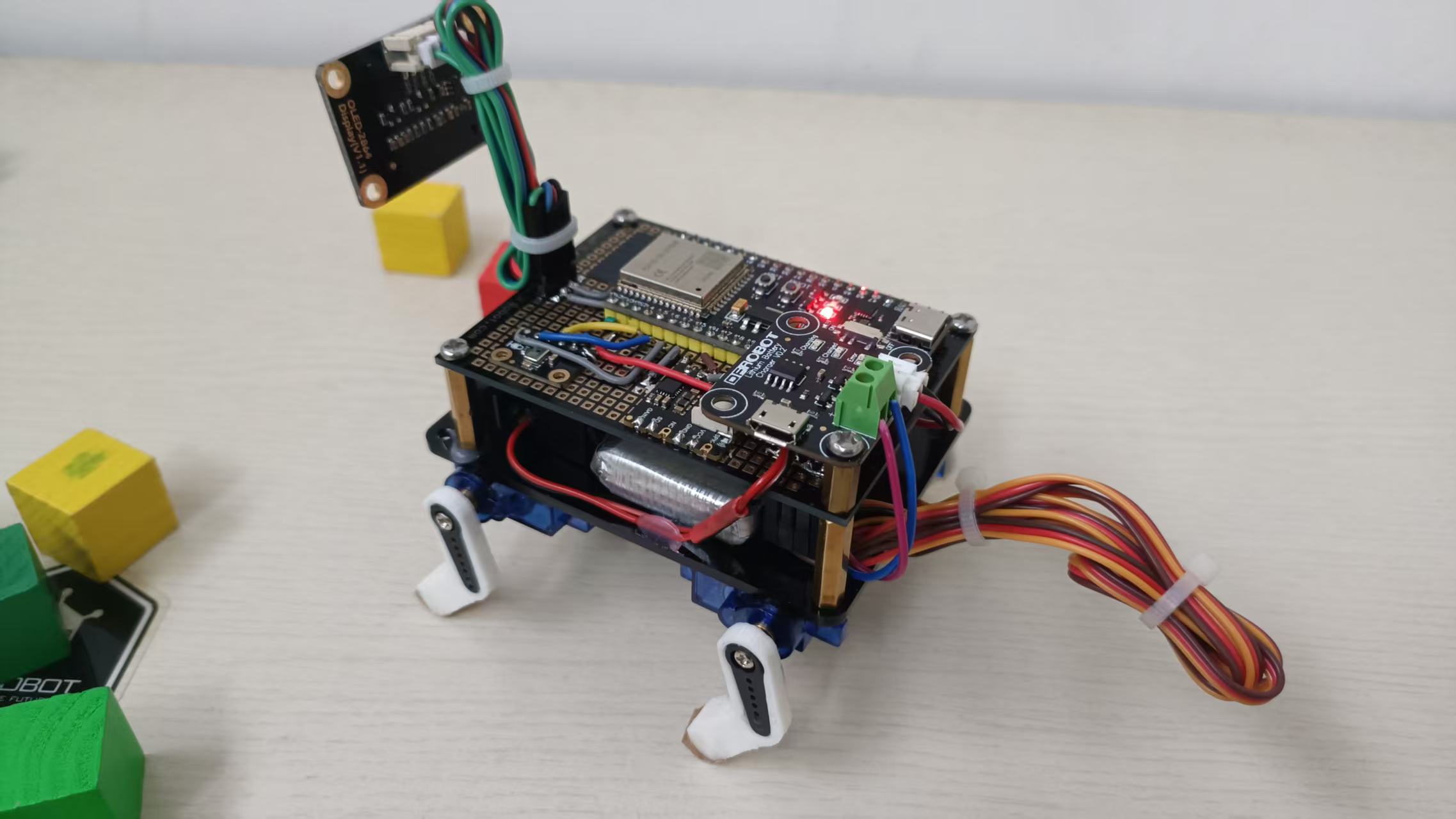 给小狗狗装了新腿。腿部文件来自B站@米士古的开源资料:
给小狗狗装了新腿。腿部文件来自B站@米士古的开源资料:
 历时80天,我们做出了自己的电子宠物_哔哩哔哩_bilibili
历时80天,我们做出了自己的电子宠物_哔哩哔哩_bilibili
 开源的代码中有很多有营养的内容,需要慢慢消化。
开源的代码中有很多有营养的内容,需要慢慢消化。
附件
桌面光滑,我做的小狗足底没有找到合适的防滑贴,所以走路打滑相当严重。
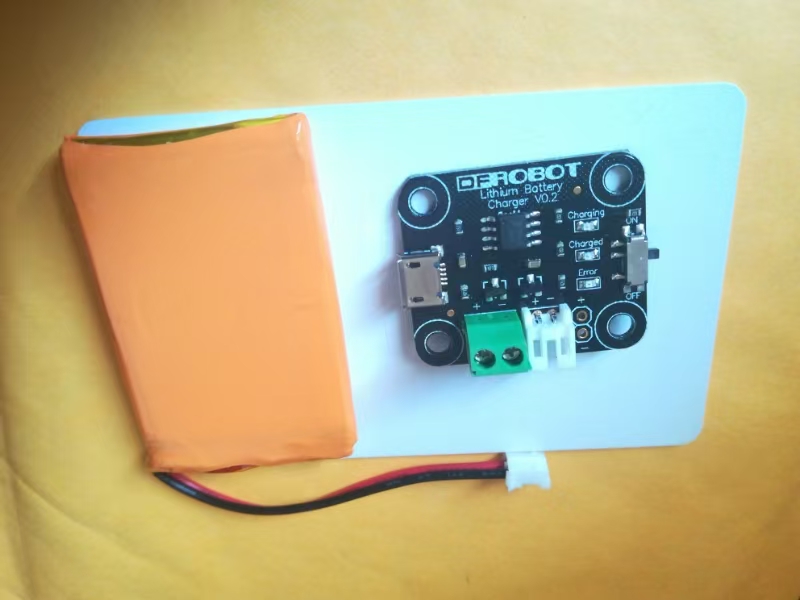
供电部分:
我发现DF出的一个充电板挺好用的,可以给锂电池充电板V1.0,同时提供3V3和5V输出,这样子可以分别给ESP32S3开发板和舵机供电。
可是我手上只有老版本的,小狗上用的就是V0.2版。
步骤3 项目介绍,明确任务
1、项目简介
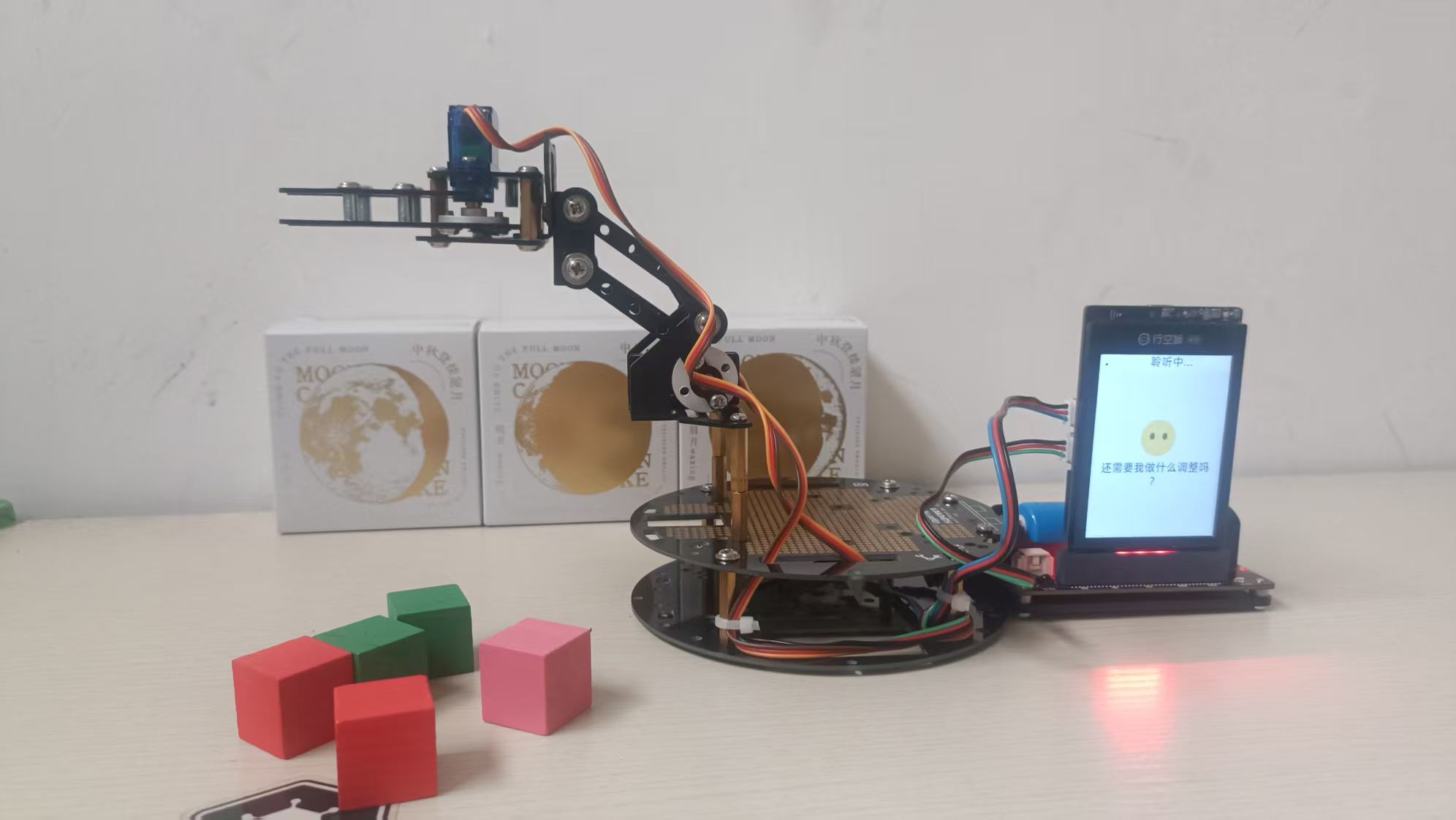
这是一个基于ESP32-S3开发板的四舵机机器小狗桌面宠物项目。通过小智AI自然语音控制,可以实现多种生动有趣的动作,包括站立、坐下、趴下、前进、后退、转向、挥手、跳舞等动作。
功能特性
小智AI自然语音控制
多种预设动作:站立、坐下、趴下、伸懒腰、挥手等
移动控制:前进、后退
趣味动作:摇摆身体、跳舞、鞠躬、摇头
MCP协议支持,易于扩展
2、硬件配置
ESP32-S3开发板
SG90舵机 × 4
引脚:GPIO9(左前), GPIO10(右前), GPIO11(左后), GPIO12(右后)

特别提示,舵机位置与引脚,舵机安放距离,腿部长度等都会使动作代码不同,所以下面小狗狗运动部分代码仅供参考,其实我开源的这一版代码中只调出了图示部分动作:
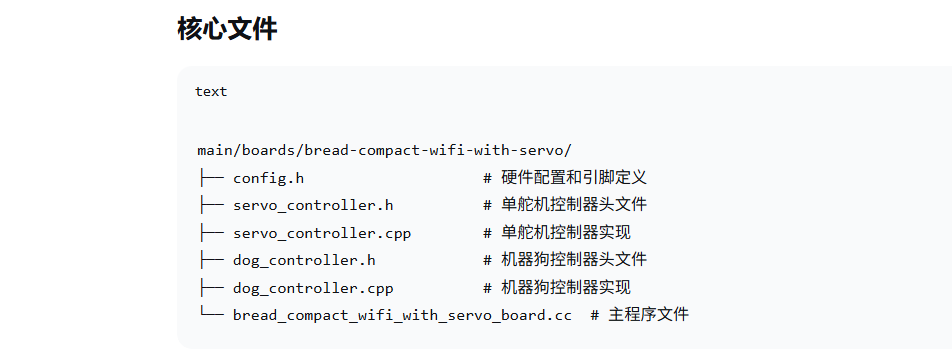
3、软件架构
 4、语音控制指令
4、语音控制指令
基本控制:"小狗站立""小狗坐下""小狗趴下""小狗伸懒腰""小狗挥手"
移动控制:"小狗前进""小狗后退"
趣味动作:"小狗摇摆身体""小狗跳舞""小狗鞠躬""小狗摇头"
系统控制:
"小狗停止" - 停止当前所有动作
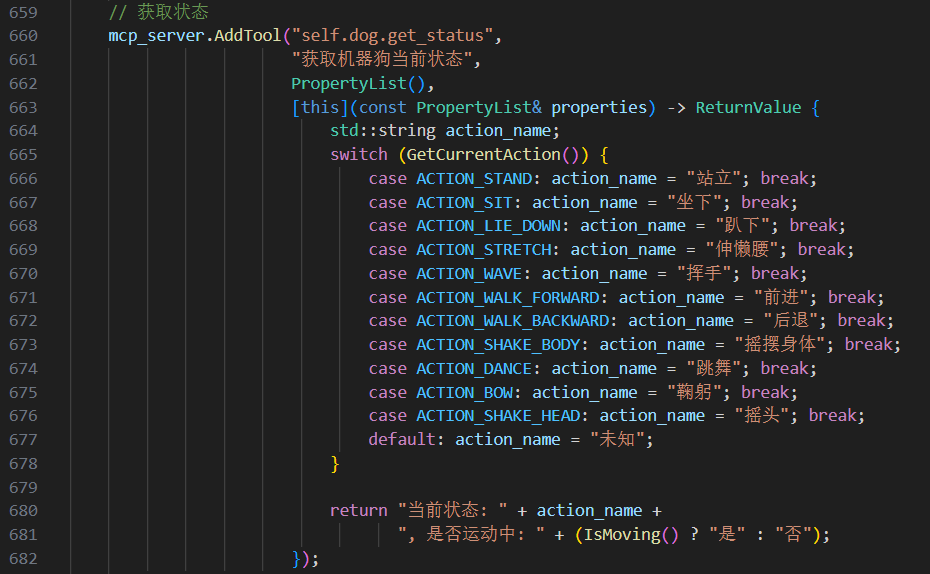
"查询小狗状态" - 获取当前状态
5、功能模块
单舵机控制:精确的PWM控制,支持平滑运动
多舵机协同:四舵机协调控制,实现复杂动作
语音控制:通过小智AI自然语音指令控制
MCP协议:标准化的工具调用接口
舵机控制采用@闪电大佬的精准的PWM控制代码,支持平滑运动,动作稳如老狗。
步骤4 代码部分、灵魂所在
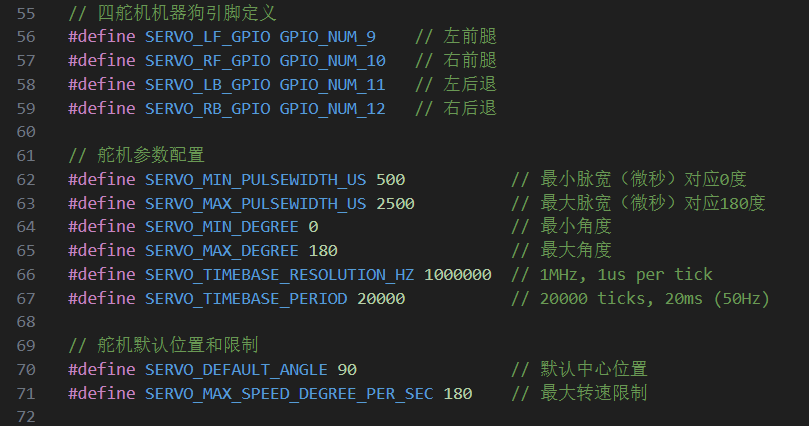
1. config.h - 硬件配置定义
定义舵机引脚:SERVO_LF_GPIO、SERVO_RF_GPIO、SERVO_LB_GPIO、SERVO_RB_GPIO
舵机参数配置:脉宽、角度范围、默认位置等
#ifndef _BOARD_CONFIG_H_
#define _BOARD_CONFIG_H_
#include <driver/gpio.h>
#define AUDIO_INPUT_SAMPLE_RATE 16000
#define AUDIO_OUTPUT_SAMPLE_RATE 24000
// 如果使用 Duplex I2S 模式,请注释下面一行
#define AUDIO_I2S_METHOD_SIMPLEX
#ifdef AUDIO_I2S_METHOD_SIMPLEX
#define AUDIO_I2S_MIC_GPIO_WS GPIO_NUM_4
#define AUDIO_I2S_MIC_GPIO_SCK GPIO_NUM_5
#define AUDIO_I2S_MIC_GPIO_DIN GPIO_NUM_6
#define AUDIO_I2S_SPK_GPIO_DOUT GPIO_NUM_7
#define AUDIO_I2S_SPK_GPIO_BCLK GPIO_NUM_15
#define AUDIO_I2S_SPK_GPIO_LRCK GPIO_NUM_16
#else
#define AUDIO_I2S_GPIO_WS GPIO_NUM_4
#define AUDIO_I2S_GPIO_BCLK GPIO_NUM_5
#define AUDIO_I2S_GPIO_DIN GPIO_NUM_6
#define AUDIO_I2S_GPIO_DOUT GPIO_NUM_7
#endif
#define BUILTIN_LED_GPIO GPIO_NUM_48
#define BOOT_BUTTON_GPIO GPIO_NUM_0
#define TOUCH_BUTTON_GPIO GPIO_NUM_47
#define VOLUME_UP_BUTTON_GPIO GPIO_NUM_40
#define VOLUME_DOWN_BUTTON_GPIO GPIO_NUM_39
#define DISPLAY_SDA_PIN GPIO_NUM_41
#define DISPLAY_SCL_PIN GPIO_NUM_42
#define DISPLAY_WIDTH 128
#if CONFIG_OLED_SSD1306_128X32
#define DISPLAY_HEIGHT 32
#elif CONFIG_OLED_SSD1306_128X64
#define DISPLAY_HEIGHT 64
#elif CONFIG_OLED_SH1106_128X64
#define DISPLAY_HEIGHT 64
#define SH1106
#else
#error "未选择 OLED 屏幕类型"
#endif
#define DISPLAY_MIRROR_X true
#define DISPLAY_MIRROR_Y true
// 四舵机机器狗引脚定义
#define SERVO_LF_GPIO GPIO_NUM_9 // 左前腿
#define SERVO_RF_GPIO GPIO_NUM_10 // 右前腿
#define SERVO_LB_GPIO GPIO_NUM_11 // 左后退
#define SERVO_RB_GPIO GPIO_NUM_12 // 右后退
// 舵机参数配置
#define SERVO_MIN_PULSEWIDTH_US 500 // 最小脉宽(微秒)对应0度
#define SERVO_MAX_PULSEWIDTH_US 2500 // 最大脉宽(微秒)对应180度
#define SERVO_MIN_DEGREE 0 // 最小角度
#define SERVO_MAX_DEGREE 180 // 最大角度
#define SERVO_TIMEBASE_RESOLUTION_HZ 1000000 // 1MHz, 1us per tick
#define SERVO_TIMEBASE_PERIOD 20000 // 20000 ticks, 20ms (50Hz)
// 舵机默认位置和限制
#define SERVO_DEFAULT_ANGLE 90 // 默认中心位置
#define SERVO_MAX_SPEED_DEGREE_PER_SEC 180 // 最大转速限制
// 板子版本信息
#define BREAD_COMPACT_WIFI_WITH_SERVO_VERSION "1.0.0"
#endif // _BOARD_CONFIG_H_
2. servo_controller.h - 单舵机控制器头文件
定义 ServoController 类
舵机基本控制方法声明
MCP工具接口
#ifndef __SERVO_CONTROLLER_H__
#define __SERVO_CONTROLLER_H__
#include <driver/ledc.h>
#include <driver/gpio.h>
#include <esp_log.h>
#include <freertos/FreeRTOS.h>
#include <freertos/task.h>
#include <freertos/queue.h>
#include <functional>
#include "config.h"
#include "mcp_server.h"
class ServoController {
public:
ServoController(gpio_num_t servo_pin, ledc_channel_t ledc_channel = LEDC_CHANNEL_0, ledc_timer_t ledc_timer = LEDC_TIMER_0);
ServoController(gpio_num_t servo_pin);
~ServoController();
// 基本控制方法
bool Initialize();
void InitializeTools(); // 初始化MCP工具
void SetAngle(int angle);
int GetCurrentAngle() const { return current_angle_; }
// 运动控制方法
void RotateClockwise(int degrees);
void RotateCounterclockwise(int degrees);
void SweepBetween(int min_angle, int max_angle, int speed_ms = 1000);
void Stop();
void Reset(); // 回到中心位置(90度)
// 状态查询
bool IsMoving() const { return is_moving_; }
bool IsSweeping() const { return is_sweeping_; }
// 设置回调函数(当运动完成时调用)
void SetOnMoveCompleteCallback(std::function<void()> callback) {
on_move_complete_callback_ = callback;
}
private:
// 硬件相关
gpio_num_t servo_pin_;
ledc_channel_t ledc_channel_;
ledc_timer_t ledc_timer_;
// 状态变量
int current_angle_;
int target_angle_;
bool is_moving_;
bool is_sweeping_;
bool stop_requested_;
// 任务和队列
TaskHandle_t servo_task_handle_;
QueueHandle_t command_queue_;
// 回调函数
std::function<void()> on_move_complete_callback_;
// 命令类型
enum CommandType {
CMD_SET_ANGLE,
CMD_ROTATE_CW,
CMD_ROTATE_CCW,
CMD_SWEEP,
CMD_STOP,
CMD_RESET
};
// 命令结构
struct ServoCommand {
CommandType type;
int param1; // 角度或度数
int param2; // 最大角度(用于扫描)或速度
int param3; // 速度参数
};
// 私有方法
void WriteAngle(int angle);
uint32_t AngleToCompare(int angle);
bool IsValidAngle(int angle) const;
int ConstrainAngle(int angle) const;
// 任务函数
static void ServoTask(void* parameter);
void ProcessCommands();
void ExecuteSetAngle(int angle);
void ExecuteRotate(int degrees, bool clockwise);
void ExecuteSweep(int min_angle, int max_angle, int speed_ms);
void SmoothMoveTo(int target_angle, int speed_ms = 500);
};
#endif // __SERVO_CONTROLLER_H__
3. servo_controller.cc - 单舵机控制器实现
ServoController 类的具体实现
PWM控制、角度转换、平滑运动等核心功能
MCP工具注册
#include "servo_controller.h"
#include <esp_log.h>
#include <cmath>
#define TAG "ServoController"
ServoController::ServoController(gpio_num_t servo_pin, ledc_channel_t ledc_channel, ledc_timer_t ledc_timer)
: servo_pin_(servo_pin)
, ledc_channel_(ledc_channel)
, ledc_timer_(ledc_timer)
, current_angle_(SERVO_DEFAULT_ANGLE)
, target_angle_(SERVO_DEFAULT_ANGLE)
, is_moving_(false)
, is_sweeping_(false)
, stop_requested_(false)
, servo_task_handle_(nullptr)
, command_queue_(nullptr)
, on_move_complete_callback_(nullptr) {
}
// 原有的单参数构造函数调用新的三参数构造函数
ServoController::ServoController(gpio_num_t servo_pin)
: ServoController(servo_pin, LEDC_CHANNEL_0, LEDC_TIMER_0) {
}
ServoController::~ServoController() {
Stop();
if (servo_task_handle_ != nullptr) {
vTaskDelete(servo_task_handle_);
}
if (command_queue_ != nullptr) {
vQueueDelete(command_queue_);
}
}
bool ServoController::Initialize() {
ESP_LOGI(TAG, "初始化SG90舵机控制器,引脚: %d", servo_pin_);
// 配置LEDC定时器 (ESP32-S3最大支持14位分辨率)
ledc_timer_config_t timer_config = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.duty_resolution = LEDC_TIMER_14_BIT,
.timer_num = ledc_timer_,
.freq_hz = 50, // 50Hz for servo
.clk_cfg = LEDC_AUTO_CLK
};
esp_err_t ret = ledc_timer_config(&timer_config);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "LEDC定时器配置失败: %s", esp_err_to_name(ret));
return false;
}
// 配置LEDC通道
ledc_channel_config_t channel_config = {
.gpio_num = servo_pin_,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = ledc_channel_,
.intr_type = LEDC_INTR_DISABLE,
.timer_sel = ledc_timer_,
.duty = 0,
.hpoint = 0
};
ret = ledc_channel_config(&channel_config);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "LEDC通道配置失败: %s", esp_err_to_name(ret));
return false;
}
// 创建命令队列
command_queue_ = xQueueCreate(10, sizeof(ServoCommand));
if (command_queue_ == nullptr) {
ESP_LOGE(TAG, "创建命令队列失败");
return false;
}
// 创建舵机控制任务
BaseType_t task_ret = xTaskCreate(
ServoTask,
"servo_task",
4096,
this,
5,
&servo_task_handle_
);
if (task_ret != pdPASS) {
ESP_LOGE(TAG, "创建舵机任务失败");
return false;
}
// 设置初始位置
WriteAngle(current_angle_);
ESP_LOGI(TAG, "SG90舵机控制器初始化成功");
return true;
}
void ServoController::InitializeTools() {
auto& mcp_server = McpServer::GetInstance();
ESP_LOGI(TAG, "开始注册舵机MCP工具...");
// 设置舵机角度
mcp_server.AddTool("self.servo.set_angle",
"设置SG90舵机到指定角度。angle: 目标角度(0-180度)",
PropertyList({Property("angle", kPropertyTypeInteger, 90, 0, 180)}),
[this](const PropertyList& properties) -> ReturnValue {
int angle = properties["angle"].value<int>();
SetAngle(angle);
return "舵机设置到 " + std::to_string(angle) + " 度";
});
// 顺时针旋转
mcp_server.AddTool("self.servo.rotate_clockwise",
"顺时针旋转SG90舵机指定角度。degrees: 旋转角度(1-180度)",
PropertyList({Property("degrees", kPropertyTypeInteger, 30, 1, 180)}),
[this](const PropertyList& properties) -> ReturnValue {
int degrees = properties["degrees"].value<int>();
RotateClockwise(degrees);
return "舵机顺时针旋转 " + std::to_string(degrees) + " 度";
});
// 逆时针旋转
mcp_server.AddTool("self.servo.rotate_counterclockwise",
"逆时针旋转SG90舵机指定角度。degrees: 旋转角度(1-180度)",
PropertyList({Property("degrees", kPropertyTypeInteger, 30, 1, 180)}),
[this](const PropertyList& properties) -> ReturnValue {
int degrees = properties["degrees"].value<int>();
RotateCounterclockwise(degrees);
return "舵机逆时针旋转 " + std::to_string(degrees) + " 度";
});
// 获取当前位置
mcp_server.AddTool("self.servo.get_position",
"获取SG90舵机当前角度位置",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
int angle = GetCurrentAngle();
return "当前舵机角度: " + std::to_string(angle) + " 度";
});
// 扫描模式
mcp_server.AddTool("self.servo.sweep",
"SG90舵机扫描模式,在指定角度范围内来回摆动。"
"min_angle: 最小角度(0-179度); max_angle: 最大角度(1-180度); "
"speed: 摆动速度,毫秒(100-5000ms)",
PropertyList({Property("min_angle", kPropertyTypeInteger, 0, 0, 179),
Property("max_angle", kPropertyTypeInteger, 180, 1, 180),
Property("speed", kPropertyTypeInteger, 1000, 100, 5000)}),
[this](const PropertyList& properties) -> ReturnValue {
int min_angle = properties["min_angle"].value<int>();
int max_angle = properties["max_angle"].value<int>();
int speed = properties["speed"].value<int>();
SweepBetween(min_angle, max_angle, speed);
return "开始扫描模式: " + std::to_string(min_angle) + "° - " +
std::to_string(max_angle) + "°";
});
// 停止舵机
mcp_server.AddTool("self.servo.stop",
"立即停止SG90舵机运动",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
Stop();
return "舵机已停止";
});
// 复位到中心位置
mcp_server.AddTool("self.servo.reset",
"将SG90舵机复位到中心位置(90度)",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
Reset();
return "舵机已复位到中心位置(90度)";
});
// 获取舵机状态
mcp_server.AddTool("self.servo.get_status",
"获取SG90舵机当前状态",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
int angle = GetCurrentAngle();
bool moving = IsMoving();
bool sweeping = IsSweeping();
std::string status = "{\"angle\":" + std::to_string(angle) +
",\"moving\":" + (moving ? "true" : "false") +
",\"sweeping\":" + (sweeping ? "true" : "false") + "}";
return status;
});
ESP_LOGI(TAG, "舵机MCP工具注册完成");
}
void ServoController::SetAngle(int angle) {
if (!IsValidAngle(angle)) {
ESP_LOGW(TAG, "无效角度: %d,将限制在有效范围内", angle);
angle = ConstrainAngle(angle);
}
ServoCommand cmd = {CMD_SET_ANGLE, angle, 0, 0};
xQueueSend(command_queue_, &cmd, portMAX_DELAY);
}
void ServoController::RotateClockwise(int degrees) {
if (degrees <= 0) {
ESP_LOGW(TAG, "旋转角度必须大于0");
return;
}
ServoCommand cmd = {CMD_ROTATE_CW, degrees, 0, 0};
xQueueSend(command_queue_, &cmd, portMAX_DELAY);
}
void ServoController::RotateCounterclockwise(int degrees) {
if (degrees <= 0) {
ESP_LOGW(TAG, "旋转角度必须大于0");
return;
}
ServoCommand cmd = {CMD_ROTATE_CCW, degrees, 0, 0};
xQueueSend(command_queue_, &cmd, portMAX_DELAY);
}
void ServoController::SweepBetween(int min_angle, int max_angle, int speed_ms) {
if (!IsValidAngle(min_angle) || !IsValidAngle(max_angle)) {
ESP_LOGW(TAG, "扫描角度范围无效: %d - %d", min_angle, max_angle);
return;
}
if (min_angle >= max_angle) {
ESP_LOGW(TAG, "最小角度必须小于最大角度");
return;
}
ServoCommand cmd = {CMD_SWEEP, min_angle, max_angle, speed_ms};
xQueueSend(command_queue_, &cmd, portMAX_DELAY);
}
void ServoController::Stop() {
stop_requested_ = true;
ServoCommand cmd = {CMD_STOP, 0, 0, 0};
xQueueSend(command_queue_, &cmd, 0); // 不等待,立即发送停止命令
}
void ServoController::Reset() {
ServoCommand cmd = {CMD_RESET, SERVO_DEFAULT_ANGLE, 0, 0};
xQueueSend(command_queue_, &cmd, portMAX_DELAY);
}
void ServoController::WriteAngle(int angle) {
angle = ConstrainAngle(angle);
uint32_t compare_value = AngleToCompare(angle);
ledc_set_duty(LEDC_LOW_SPEED_MODE, ledc_channel_, compare_value);
ledc_update_duty(LEDC_LOW_SPEED_MODE, ledc_channel_);
current_angle_ = angle;
}
uint32_t ServoController::AngleToCompare(int angle) {
// 将角度转换为PWM占空比
// SG90: 0.5ms-2.5ms 对应 0-180度
// 50Hz周期 = 20ms
// 占空比 = (脉宽 / 周期) * 2^14 (ESP32-S3使用14位分辨率)
float pulse_width_ms = 0.5f + (angle / 180.0f) * 2.0f; // 0.5ms to 2.5ms
float duty_cycle = pulse_width_ms / 20.0f; // 20ms period
uint32_t compare_value = (uint32_t)(duty_cycle * 16383); // 14-bit resolution (2^14 - 1)
return compare_value;
}
bool ServoController::IsValidAngle(int angle) const {
return angle >= SERVO_MIN_DEGREE && angle <= SERVO_MAX_DEGREE;
}
int ServoController::ConstrainAngle(int angle) const {
if (angle < SERVO_MIN_DEGREE) return SERVO_MIN_DEGREE;
if (angle > SERVO_MAX_DEGREE) return SERVO_MAX_DEGREE;
return angle;
}
void ServoController::ServoTask(void* parameter) {
ServoController* controller = static_cast<ServoController*>(parameter);
controller->ProcessCommands();
}
void ServoController::ProcessCommands() {
ServoCommand cmd;
while (true) {
if (xQueueReceive(command_queue_, &cmd, pdMS_TO_TICKS(100)) == pdTRUE) {
if (stop_requested_ && cmd.type != CMD_STOP) {
continue; // 忽略非停止命令
}
switch (cmd.type) {
case CMD_SET_ANGLE:
ExecuteSetAngle(cmd.param1);
break;
case CMD_ROTATE_CW:
ExecuteRotate(cmd.param1, true);
break;
case CMD_ROTATE_CCW:
ExecuteRotate(cmd.param1, false);
break;
case CMD_SWEEP:
ExecuteSweep(cmd.param1, cmd.param2, cmd.param3);
break;
case CMD_STOP:
is_moving_ = false;
is_sweeping_ = false;
stop_requested_ = false;
ESP_LOGI(TAG, "舵机停止");
break;
case CMD_RESET:
ExecuteSetAngle(cmd.param1);
break;
}
}
}
}
void ServoController::ExecuteSetAngle(int angle) {
ESP_LOGI(TAG, "设置舵机角度: %d度", angle);
is_moving_ = true;
SmoothMoveTo(angle, 500);
is_moving_ = false;
if (on_move_complete_callback_) {
on_move_complete_callback_();
}
}
void ServoController::ExecuteRotate(int degrees, bool clockwise) {
int target = current_angle_ + (clockwise ? degrees : -degrees);
target = ConstrainAngle(target);
ESP_LOGI(TAG, "%s旋转 %d度,从 %d度 到 %d度",
clockwise ? "顺时针" : "逆时针", degrees, current_angle_, target);
is_moving_ = true;
SmoothMoveTo(target, 500);
is_moving_ = false;
if (on_move_complete_callback_) {
on_move_complete_callback_();
}
}
void ServoController::ExecuteSweep(int min_angle, int max_angle, int speed_ms) {
ESP_LOGI(TAG, "开始扫描模式: %d度 - %d度,速度: %dms", min_angle, max_angle, speed_ms);
is_sweeping_ = true;
is_moving_ = true;
bool direction = true; // true = 向最大角度,false = 向最小角度
while (is_sweeping_ && !stop_requested_) {
int target = direction ? max_angle : min_angle;
SmoothMoveTo(target, speed_ms);
if (stop_requested_) break;
direction = !direction;
vTaskDelay(pdMS_TO_TICKS(100)); // 短暂停顿
}
is_sweeping_ = false;
is_moving_ = false;
ESP_LOGI(TAG, "扫描模式结束");
if (on_move_complete_callback_) {
on_move_complete_callback_();
}
}
void ServoController::SmoothMoveTo(int target_angle, int speed_ms) {
target_angle = ConstrainAngle(target_angle);
if (target_angle == current_angle_) {
return; // 已经在目标位置
}
int start_angle = current_angle_;
int angle_diff = target_angle - start_angle;
int steps = abs(angle_diff);
if (steps == 0) return;
int delay_per_step = speed_ms / steps;
if (delay_per_step < 10) delay_per_step = 10; // 最小延迟
for (int i = 1; i <= steps && !stop_requested_; i++) {
int current_step_angle = start_angle + (angle_diff * i) / steps;
WriteAngle(current_step_angle);
vTaskDelay(pdMS_TO_TICKS(delay_per_step));
}
// 确保到达精确位置
if (!stop_requested_) {
WriteAngle(target_angle);
}
}
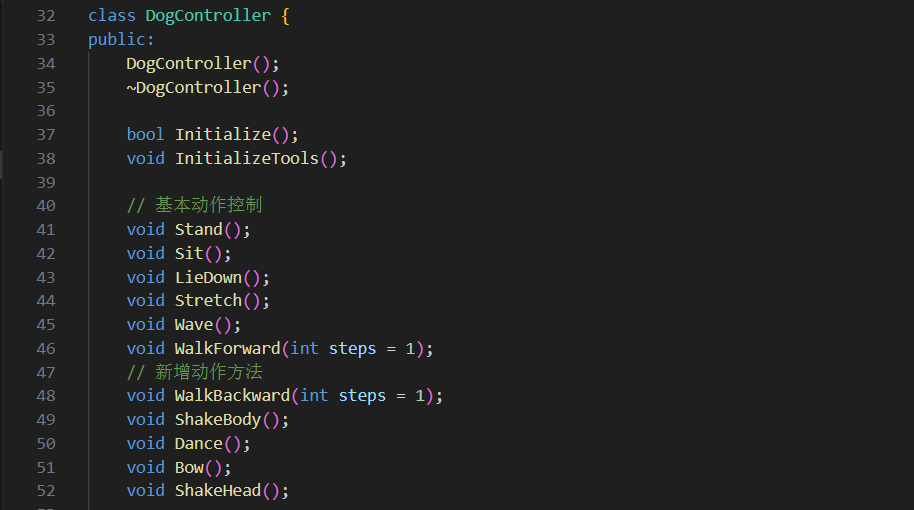
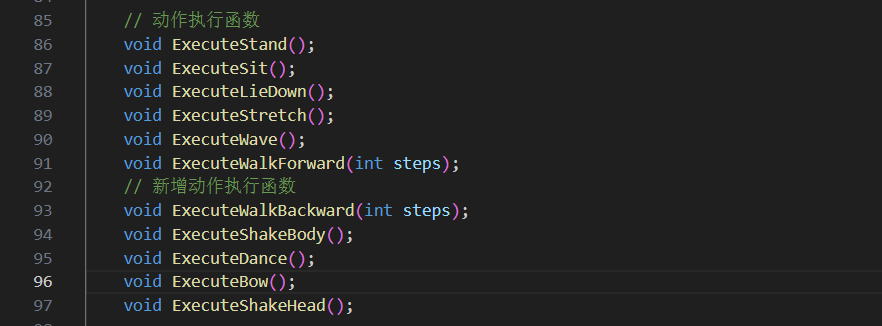
4. dog_controller.h - 机器狗控制器头文件
定义 DogController 类
动作枚举和腿类型定义
所有动作方法的声明
#如果增加新动作,这里也要加上
#ifndef __DOG_CONTROLLER_H__
#define __DOG_CONTROLLER_H__
#include "servo_controller.h"
#include "config.h"
#include <vector>
#include <map>
// 腿的类型定义
enum LegType {
LEG_LEFT_FRONT = 0,
LEG_RIGHT_FRONT = 1,
LEG_LEFT_BACK = 2,
LEG_RIGHT_BACK = 3
};
// 动作类型定义
enum DogAction {
ACTION_STAND = 0,
ACTION_SIT,
ACTION_LIE_DOWN,
ACTION_STRETCH,
ACTION_WAVE,
ACTION_WALK_FORWARD,
ACTION_WALK_BACKWARD, // 新增:后退
ACTION_SHAKE_BODY, // 新增:摇摆身体
ACTION_DANCE, // 新增:跳舞
ACTION_BOW, // 新增:鞠躬
ACTION_SHAKE_HEAD // 新增:摇头
};
class DogController {
public:
DogController();
~DogController();
bool Initialize();
void InitializeTools();
// 基本动作控制
void Stand();
void Sit();
void LieDown();
void Stretch();
void Wave();
void WalkForward(int steps = 1);
// 新增动作方法
void WalkBackward(int steps = 1);
void ShakeBody();
void Dance();
void Bow();
void ShakeHead();
// 停止所有动作
void StopAll();
// 状态查询
bool IsMoving() const;
DogAction GetCurrentAction() const { return current_action_; }
private:
std::vector<ServoController*> servos_;
DogAction current_action_;
bool is_moving_;
// 舵机校准参数(根据您的描述调整)
struct LegCalibration {
int stand_angle; // 站立角度
int sit_angle; // 坐下角度
int lie_angle; // 趴下角度
int forward_offset; // 向前摆动的偏移量
};
std::map<LegType, LegCalibration> leg_calibration_;
// 初始化舵机校准参数
void InitializeCalibration();
// 设置单个舵机角度(带校准)
void SetLegAngle(LegType leg, int angle, int speed_ms = 500);
// 设置所有舵机角度
void SetAllLegs(int lf_angle, int rf_angle, int lb_angle, int rb_angle, int speed_ms = 500);
// 动作执行函数
void ExecuteStand();
void ExecuteSit();
void ExecuteLieDown();
void ExecuteStretch();
void ExecuteWave();
void ExecuteWalkForward(int steps);
// 新增动作执行函数
void ExecuteWalkBackward(int steps);
void ExecuteShakeBody();
void ExecuteDance();
void ExecuteBow();
void ExecuteShakeHead();
// 检查所有舵机是否就绪
bool AllServosReady() const;
};
#endif // __DOG_CONTROLLER_H__5. dog_controller.cc - 机器狗控制器实现
四舵机协同控制逻辑
站立、坐下、趴下、前进、后退、转向等动作实现
完整的MCP工具注册
#机器狗动作编排与调试的重点文件
#增加动作与动作的打磨都要在这个文件中进行
#include "dog_controller.h"
#include "mcp_server.h"
#include <esp_log.h>
#define TAG "DogController"
DogController::DogController()
: current_action_(ACTION_STAND)
, is_moving_(false) {
// 初始化四个舵机控制器,使用不同的LEDC通道
servos_.push_back(new ServoController(SERVO_LF_GPIO, LEDC_CHANNEL_0, LEDC_TIMER_0));
servos_.push_back(new ServoController(SERVO_RF_GPIO, LEDC_CHANNEL_1, LEDC_TIMER_0));
servos_.push_back(new ServoController(SERVO_LB_GPIO, LEDC_CHANNEL_2, LEDC_TIMER_0));
servos_.push_back(new ServoController(SERVO_RB_GPIO, LEDC_CHANNEL_3, LEDC_TIMER_0));
InitializeCalibration();
}
DogController::~DogController() {
StopAll();
for (auto servo : servos_) {
if (servo != nullptr) {
delete servo;
}
}
servos_.clear();
}
bool DogController::Initialize() {
ESP_LOGI(TAG, "初始化四舵机机器狗控制器");
// 初始化所有舵机
for (int i = 0; i < servos_.size(); i++) {
if (servos_[i] != nullptr && !servos_[i]->Initialize()) {
ESP_LOGE(TAG, "舵机 %d 初始化失败", i);
return false;
}
}
// 设置初始站立位置
vTaskDelay(pdMS_TO_TICKS(1000)); // 等待所有舵机就绪
Stand();
ESP_LOGI(TAG, "机器狗控制器初始化成功");
return true;
}
void DogController::InitializeCalibration() {
// 根据您的描述:左侧腿舵机小角度向前摆,右侧腿大角度向前摆
// 这里需要根据实际机械结构调整这些参数
// 左前腿校准
leg_calibration_[LEG_LEFT_FRONT] = {
.stand_angle = 90, // 站立中间位置
.sit_angle = 60, // 坐下角度
.lie_angle = 20, // 趴下角度
.forward_offset = -30 // 向前摆动偏移(小角度)
};
// 右前腿校准
leg_calibration_[LEG_RIGHT_FRONT] = {
.stand_angle = 90,
.sit_angle = 120, // 对称角度
.lie_angle = 160, // 对称角度
.forward_offset = 30 // 向前摆动偏移(大角度)
};
// 左后腿校准
leg_calibration_[LEG_LEFT_BACK] = {
.stand_angle = 90,
.sit_angle = 45, // 对称角度
.lie_angle = 30, // 对称角度
.forward_offset = -30 // 向前摆动偏移(小角度)
};
// 右后腿校准
leg_calibration_[LEG_RIGHT_BACK] = {
.stand_angle = 90,
.sit_angle = 135, // 对称角度
.lie_angle = 150, // 对称角度
.forward_offset = 30 // 向前摆动偏移(大角度)
};
}
void DogController::Stand() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行起立站立动作");
current_action_ = ACTION_STAND;
is_moving_ = true;
ExecuteStand();
is_moving_ = false;
}
void DogController::Sit() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行坐下动作");
current_action_ = ACTION_SIT;
is_moving_ = true;
ExecuteSit();
is_moving_ = false;
}
void DogController::LieDown() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行趴下动作");
current_action_ = ACTION_LIE_DOWN;
is_moving_ = true;
ExecuteLieDown();
is_moving_ = false;
}
void DogController::Stretch() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行伸懒腰动作");
current_action_ = ACTION_STRETCH;
is_moving_ = true;
ExecuteStretch();
is_moving_ = false;
}
void DogController::Wave() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行挥手招手打招呼动作");
current_action_ = ACTION_WAVE;
is_moving_ = true;
ExecuteWave();
is_moving_ = false;
}
void DogController::WalkForward(int steps) {
if (is_moving_) return;
ESP_LOGI(TAG, "执行前进动作,步数: %d", steps);
current_action_ = ACTION_WALK_FORWARD;
is_moving_ = true;
ExecuteWalkForward(steps);
is_moving_ = false;
}
void DogController::WalkBackward(int steps) {
if (is_moving_) return;
ESP_LOGI(TAG, "执行后退动作,步数: %d", steps);
current_action_ = ACTION_WALK_BACKWARD;
is_moving_ = true;
ExecuteWalkBackward(steps);
is_moving_ = false;
}
void DogController::ShakeBody() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行摇摆身体动作");
current_action_ = ACTION_SHAKE_BODY;
is_moving_ = true;
ExecuteShakeBody();
is_moving_ = false;
}
void DogController::Dance() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行跳舞动作");
current_action_ = ACTION_DANCE;
is_moving_ = true;
ExecuteDance();
is_moving_ = false;
}
void DogController::Bow() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行鞠躬动作");
current_action_ = ACTION_BOW;
is_moving_ = true;
ExecuteBow();
is_moving_ = false;
}
void DogController::ShakeHead() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行摇头动作");
current_action_ = ACTION_SHAKE_HEAD;
is_moving_ = true;
ExecuteShakeHead();
is_moving_ = false;
}
void DogController::StopAll() {
ESP_LOGI(TAG, "停止所有动作");
for (auto servo : servos_) {
if (servo != nullptr) {
servo->Stop();
}
}
is_moving_ = false;
}
bool DogController::IsMoving() const {
return is_moving_;
}
void DogController::SetLegAngle(LegType leg, int angle, int speed_ms) {
if (leg < servos_.size() && servos_[leg] != nullptr) {
servos_[leg]->SetAngle(angle);
// 注意:这里需要等待动作完成,可以使用回调或延时
vTaskDelay(pdMS_TO_TICKS(speed_ms));
}
}
void DogController::SetAllLegs(int lf_angle, int rf_angle, int lb_angle, int rb_angle, int speed_ms) {
if (servos_[LEG_LEFT_FRONT] != nullptr) {
servos_[LEG_LEFT_FRONT]->SetAngle(lf_angle);
}
if (servos_[LEG_RIGHT_FRONT] != nullptr) {
servos_[LEG_RIGHT_FRONT]->SetAngle(rf_angle);
}
if (servos_[LEG_LEFT_BACK] != nullptr) {
servos_[LEG_LEFT_BACK]->SetAngle(lb_angle);
}
if (servos_[LEG_RIGHT_BACK] != nullptr) {
servos_[LEG_RIGHT_BACK]->SetAngle(rb_angle);
}
vTaskDelay(pdMS_TO_TICKS(speed_ms));
}
bool DogController::AllServosReady() const {
for (auto servo : servos_) {
if (servo != nullptr && servo->IsMoving()) {
return false;
}
}
return true;
}
void DogController::ExecuteStand() {
// 站立姿势:所有腿在中间位置
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle ,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle ,
leg_calibration_[LEG_LEFT_BACK].stand_angle ,
leg_calibration_[LEG_RIGHT_BACK].stand_angle ,
400
);
}
void DogController::ExecuteSit() {
// 坐下姿势:前腿稍微弯曲,后腿大幅度弯曲
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].sit_angle,
leg_calibration_[LEG_RIGHT_BACK].sit_angle,
400
);
}
void DogController::ExecuteLieDown() {
// 趴下姿势:所有腿都贴近身体
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].lie_angle,
leg_calibration_[LEG_RIGHT_FRONT].lie_angle,
leg_calibration_[LEG_LEFT_BACK].lie_angle,
leg_calibration_[LEG_RIGHT_BACK].lie_angle,
600
);
}
void DogController::ExecuteStretch() {
// 伸懒腰:前腿向前伸展,后腿向后伸展
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle - 60 ,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 60,
leg_calibration_[LEG_LEFT_BACK].stand_angle + 60,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - 60,
400
);
vTaskDelay(pdMS_TO_TICKS(1000));
// 回到站立姿势
ExecuteStand();
}
void DogController::ExecuteWave() {
// 回到坐姿
ExecuteSit();
// 挥手:右前腿 waving 动作
for (int i = 0; i < 3; i++) {
SetLegAngle(LEG_RIGHT_FRONT,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 90, 150);
vTaskDelay(pdMS_TO_TICKS(150));
SetLegAngle(LEG_RIGHT_FRONT,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 60, 150);
vTaskDelay(pdMS_TO_TICKS(150));
}
// 回到站立姿势
ExecuteStand();
}
void DogController::ExecuteWalkForward(int steps) {
for (int step = 0; step < steps ; step++) {
// 步态1:对角线腿抬起
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle + leg_calibration_[LEG_LEFT_FRONT].forward_offset,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle ,
leg_calibration_[LEG_LEFT_BACK].stand_angle ,
leg_calibration_[LEG_RIGHT_BACK].stand_angle + leg_calibration_[LEG_RIGHT_BACK].forward_offset,
300
);
vTaskDelay(pdMS_TO_TICKS(100));
// 步态2:另一对角线腿抬起
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle ,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle - leg_calibration_[LEG_RIGHT_FRONT].forward_offset,
leg_calibration_[LEG_LEFT_BACK].stand_angle - leg_calibration_[LEG_LEFT_BACK].forward_offset,
leg_calibration_[LEG_RIGHT_BACK].stand_angle ,
300
);
vTaskDelay(pdMS_TO_TICKS(100));
// 步态3:对角线腿抬起
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle ,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + leg_calibration_[LEG_RIGHT_FRONT].forward_offset,
leg_calibration_[LEG_LEFT_BACK].stand_angle + leg_calibration_[LEG_LEFT_BACK].forward_offset,
leg_calibration_[LEG_RIGHT_BACK].stand_angle ,
300
);
vTaskDelay(pdMS_TO_TICKS(100));
// 步态4:另一对角线腿抬起
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle - leg_calibration_[LEG_LEFT_FRONT].forward_offset,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle ,
leg_calibration_[LEG_LEFT_BACK].stand_angle ,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - leg_calibration_[LEG_RIGHT_BACK].forward_offset,
300
);
vTaskDelay(pdMS_TO_TICKS(100));
}
// 回到站立姿势
ExecuteStand();
}
void DogController::ExecuteWalkBackward(int steps) {
for (int step = 0; step < steps ; step++) {
// 后退步态1:与前进相反的对角线运动
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle - leg_calibration_[LEG_LEFT_FRONT].forward_offset,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - leg_calibration_[LEG_RIGHT_BACK].forward_offset,
300
);
vTaskDelay(pdMS_TO_TICKS(100));
// 后退步态2:另一对角线
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + leg_calibration_[LEG_RIGHT_FRONT].forward_offset,
leg_calibration_[LEG_LEFT_BACK].stand_angle + leg_calibration_[LEG_LEFT_BACK].forward_offset,
leg_calibration_[LEG_RIGHT_BACK].stand_angle,
300
);
vTaskDelay(pdMS_TO_TICKS(100));
// 后退步态3
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle - leg_calibration_[LEG_RIGHT_FRONT].forward_offset,
leg_calibration_[LEG_LEFT_BACK].stand_angle - leg_calibration_[LEG_LEFT_BACK].forward_offset,
leg_calibration_[LEG_RIGHT_BACK].stand_angle,
300
);
vTaskDelay(pdMS_TO_TICKS(100));
// 后退步态4
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle + leg_calibration_[LEG_LEFT_FRONT].forward_offset,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle + leg_calibration_[LEG_RIGHT_BACK].forward_offset,
300
);
vTaskDelay(pdMS_TO_TICKS(100));
}
// 回到站立姿势
ExecuteStand();
}
void DogController::ExecuteShakeBody() {
// 身体左右摇摆:左右腿交替倾斜
for (int i = 0; i < 4; i++) {
// 向左倾斜
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle - 20,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 20,
leg_calibration_[LEG_LEFT_BACK].stand_angle - 20,
leg_calibration_[LEG_RIGHT_BACK].stand_angle + 20,
200
);
vTaskDelay(pdMS_TO_TICKS(100));
// 向右倾斜
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle + 20,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle - 20,
leg_calibration_[LEG_LEFT_BACK].stand_angle + 20,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - 20,
200
);
vTaskDelay(pdMS_TO_TICKS(100));
}
// 回到站立姿势
ExecuteStand();
}
void DogController::ExecuteDance() {
// 跳舞动作:一系列有趣的动作组合
// 1. 抬起前腿
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle + 60,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 60,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle,
200
);
vTaskDelay(pdMS_TO_TICKS(100));
// 2. 放下前腿,抬起后腿
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle - 60,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - 60,
200
);
vTaskDelay(pdMS_TO_TICKS(100));
// 3. 快速左右摇摆
for (int i = 0; i < 3; i++) {
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle - 30,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 30,
leg_calibration_[LEG_LEFT_BACK].stand_angle - 30,
leg_calibration_[LEG_RIGHT_BACK].stand_angle + 30,
200
);
vTaskDelay(pdMS_TO_TICKS(100));
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle + 30,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle - 30,
leg_calibration_[LEG_LEFT_BACK].stand_angle + 30,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - 30,
200
);
vTaskDelay(pdMS_TO_TICKS(100));
}
// 回到站立姿势
ExecuteStand();
}
void DogController::ExecuteBow() {
// 鞠躬动作:前腿弯曲,身体前倾
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].sit_angle,
leg_calibration_[LEG_RIGHT_FRONT].sit_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle,
500
);
vTaskDelay(pdMS_TO_TICKS(1000));
// 回到站立姿势
ExecuteStand();
}
void DogController::ExecuteShakeHead() {
// 摇头动作:通过前腿的交替运动模拟摇头
for (int i = 0; i < 3; i++) {
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle - 40,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 40,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle,
200
);
vTaskDelay(pdMS_TO_TICKS(100));
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle + 40,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle - 40,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle,
200
);
vTaskDelay(pdMS_TO_TICKS(100));
}
// 回到站立姿势
ExecuteStand();
}
void DogController::InitializeTools() {
auto& mcp_server = McpServer::GetInstance();
ESP_LOGI(TAG, "开始注册机器狗MCP工具...");
// 站立
mcp_server.AddTool("self.dog.stand",
"机器狗站立姿势",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
Stand();
return "机器狗已站立";
});
// 坐下
mcp_server.AddTool("self.dog.sit",
"机器狗坐下",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
Sit();
return "机器狗已坐下";
});
// 趴下
mcp_server.AddTool("self.dog.lie_down",
"机器狗趴下",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
LieDown();
return "机器狗已趴下";
});
// 伸懒腰
mcp_server.AddTool("self.dog.stretch",
"机器狗伸懒腰",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
Stretch();
return "机器狗在伸懒腰";
});
// 挥手打招呼
mcp_server.AddTool("self.dog.wave",
"机器狗挥手打招呼",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
Wave();
return "机器狗在挥手打招呼";
});
// 前进
mcp_server.AddTool("self.dog.walk_forward",
"机器狗前进。steps: 步数(1-10)",
PropertyList({Property("steps", kPropertyTypeInteger, 8, 1, 10)}),
[this](const PropertyList& properties) -> ReturnValue {
int steps = properties["steps"].value<int>();
WalkForward(steps);
return "机器狗前进 " + std::to_string(steps) + " 步";
});
// 后退
mcp_server.AddTool("self.dog.walk_backward",
"机器狗后退。steps: 步数(1-10)",
PropertyList({Property("steps", kPropertyTypeInteger, 8, 1, 10)}),
[this](const PropertyList& properties) -> ReturnValue {
int steps = properties["steps"].value<int>();
WalkBackward(steps);
return "机器狗后退 " + std::to_string(steps) + " 步";
});
// 摇摆身体
mcp_server.AddTool("self.dog.shake_body",
"机器狗摇摆身体",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
ShakeBody();
return "机器狗在摇摆身体";
});
// 跳舞
mcp_server.AddTool("self.dog.dance",
"机器狗跳舞",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
Dance();
return "机器狗在跳舞";
});
// 鞠躬
mcp_server.AddTool("self.dog.bow",
"机器狗鞠躬",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
Bow();
return "机器狗在鞠躬";
});
// 摇头
mcp_server.AddTool("self.dog.shake_head",
"机器狗摇头",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
ShakeHead();
return "机器狗在摇头";
});
// 停止所有动作
mcp_server.AddTool("self.dog.stop",
"停止机器狗所有动作",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
StopAll();
return "机器狗已停止";
});
// 获取状态
mcp_server.AddTool("self.dog.get_status",
"获取机器狗当前状态",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
std::string action_name;
switch (GetCurrentAction()) {
case ACTION_STAND: action_name = "站立"; break;
case ACTION_SIT: action_name = "坐下"; break;
case ACTION_LIE_DOWN: action_name = "趴下"; break;
case ACTION_STRETCH: action_name = "伸懒腰"; break;
case ACTION_WAVE: action_name = "挥手"; break;
case ACTION_WALK_FORWARD: action_name = "前进"; break;
case ACTION_WALK_BACKWARD: action_name = "后退"; break;
case ACTION_SHAKE_BODY: action_name = "摇摆身体"; break;
case ACTION_DANCE: action_name = "跳舞"; break;
case ACTION_BOW: action_name = "鞠躬"; break;
case ACTION_SHAKE_HEAD: action_name = "摇头"; break;
default: action_name = "未知";
}
return "当前状态: " + action_name +
", 是否运动中: " + (IsMoving() ? "是" : "否");
});
ESP_LOGI(TAG, "机器狗MCP工具注册完成");
}6. bread_compact_wifi_with_servo.cc - 主程序文件
机器狗控制器的初始化和集成
替换原来的单舵机控制器
系统启动和任务管理
#include "wifi_board.h"
#include "codecs/no_audio_codec.h"
#include "display/oled_display.h"
#include "system_reset.h"
#include "application.h"
#include "button.h"
#include "config.h"
#include "mcp_server.h"
#include "servo_controller.h"
#include "led/single_led.h"
#include "assets/lang_config.h"
#include <wifi_station.h>
#include <esp_log.h>
#include <driver/i2c_master.h>
#include <esp_lcd_panel_ops.h>
#include <esp_lcd_panel_vendor.h>
#include "dog_controller.h"
#ifdef SH1106
#include <esp_lcd_panel_sh1106.h>
#endif
#define TAG "BreadCompactWifiWithServo"
LV_FONT_DECLARE(font_puhui_14_1);
LV_FONT_DECLARE(font_awesome_14_1);
class BreadCompactWifiWithServoBoard : public WifiBoard {
private:
i2c_master_bus_handle_t display_i2c_bus_;
esp_lcd_panel_io_handle_t panel_io_ = nullptr;
esp_lcd_panel_handle_t panel_ = nullptr;
Display *display_ = nullptr;
Button boot_button_;
Button touch_button_;
Button volume_up_button_;
Button volume_down_button_;
DogController *dog_controller_;
void InitializeDisplayI2c() {
i2c_master_bus_config_t bus_config = {
.i2c_port = (i2c_port_t)0,
.sda_io_num = DISPLAY_SDA_PIN,
.scl_io_num = DISPLAY_SCL_PIN,
.clk_source = I2C_CLK_SRC_DEFAULT,
.glitch_ignore_cnt = 7,
.intr_priority = 0,
.trans_queue_depth = 0,
.flags = {
.enable_internal_pullup = 1,
},
};
ESP_ERROR_CHECK(i2c_new_master_bus(&bus_config, &display_i2c_bus_));
}
void InitializeSsd1306Display() {
// SSD1306 config
esp_lcd_panel_io_i2c_config_t io_config = {
.dev_addr = 0x3C,
.on_color_trans_done = nullptr,
.user_ctx = nullptr,
.control_phase_bytes = 1,
.dc_bit_offset = 6,
.lcd_cmd_bits = 8,
.lcd_param_bits = 8,
.flags = {
.dc_low_on_data = 0,
.disable_control_phase = 0,
},
.scl_speed_hz = 400 * 1000,
};
ESP_ERROR_CHECK(esp_lcd_new_panel_io_i2c_v2(display_i2c_bus_, &io_config, &panel_io_));
ESP_LOGI(TAG, "Install SSD1306 driver");
esp_lcd_panel_dev_config_t panel_config = {};
panel_config.reset_gpio_num = -1;
panel_config.bits_per_pixel = 1;
esp_lcd_panel_ssd1306_config_t ssd1306_config = {
.height = static_cast<uint8_t>(DISPLAY_HEIGHT),
};
panel_config.vendor_config = &ssd1306_config;
#ifdef SH1106
ESP_ERROR_CHECK(esp_lcd_new_panel_sh1106(panel_io_, &panel_config, &panel_));
#else
ESP_ERROR_CHECK(esp_lcd_new_panel_ssd1306(panel_io_, &panel_config, &panel_));
#endif
ESP_LOGI(TAG, "SSD1306 driver installed");
// Reset the display
ESP_ERROR_CHECK(esp_lcd_panel_reset(panel_));
if (esp_lcd_panel_init(panel_) != ESP_OK) {
ESP_LOGE(TAG, "Failed to initialize display");
display_ = new NoDisplay();
return;
}
ESP_ERROR_CHECK(esp_lcd_panel_invert_color(panel_, false));
// Set the display to on
ESP_LOGI(TAG, "Turning display on");
ESP_ERROR_CHECK(esp_lcd_panel_disp_on_off(panel_, true));
display_ = new OledDisplay(panel_io_, panel_, DISPLAY_WIDTH, DISPLAY_HEIGHT, DISPLAY_MIRROR_X, DISPLAY_MIRROR_Y,
{&font_puhui_14_1, &font_awesome_14_1});
}
void InitializeButtons() {
boot_button_.OnClick([this]() {
auto& app = Application::GetInstance();
if (app.GetDeviceState() == kDeviceStateStarting && !WifiStation::GetInstance().IsConnected()) {
ResetWifiConfiguration();
}
app.ToggleChatState();
});
touch_button_.OnPressDown([this]() {
Application::GetInstance().StartListening();
});
touch_button_.OnPressUp([this]() {
Application::GetInstance().StopListening();
});
volume_up_button_.OnClick([this]() {
auto codec = GetAudioCodec();
auto volume = codec->output_volume() + 10;
if (volume > 100) {
volume = 100;
}
codec->SetOutputVolume(volume);
GetDisplay()->ShowNotification(Lang::Strings::VOLUME + std::to_string(volume));
});
volume_up_button_.OnLongPress([this]() {
GetAudioCodec()->SetOutputVolume(100);
GetDisplay()->ShowNotification(Lang::Strings::MAX_VOLUME);
});
volume_down_button_.OnClick([this]() {
auto codec = GetAudioCodec();
auto volume = codec->output_volume() - 10;
if (volume < 0) {
volume = 0;
}
codec->SetOutputVolume(volume);
GetDisplay()->ShowNotification(Lang::Strings::VOLUME + std::to_string(volume));
});
volume_down_button_.OnLongPress([this]() {
GetAudioCodec()->SetOutputVolume(0);
GetDisplay()->ShowNotification(Lang::Strings::MUTED);
});
}
void InitializeDogController() {
ESP_LOGI(TAG, "初始化机器狗控制器");
dog_controller_ = new DogController();
if (!dog_controller_->Initialize()) {
ESP_LOGE(TAG, "机器狗控制器初始化失败");
delete dog_controller_;
dog_controller_ = nullptr;
return;
}
ESP_LOGI(TAG, "机器狗控制器初始化完成");
}
// 物联网初始化,逐步迁移到 MCP 协议
void InitializeTools() {
if (dog_controller_ != nullptr) {
dog_controller_->InitializeTools();
}
}
public:
BreadCompactWifiWithServoBoard() :
boot_button_(BOOT_BUTTON_GPIO),
touch_button_(TOUCH_BUTTON_GPIO),
volume_up_button_(VOLUME_UP_BUTTON_GPIO),
volume_down_button_(VOLUME_DOWN_BUTTON_GPIO),
dog_controller_(nullptr) {
InitializeDisplayI2c();
InitializeSsd1306Display();
InitializeButtons();
InitializeDogController();
InitializeTools();
}
virtual ~BreadCompactWifiWithServoBoard() {
if (dog_controller_) {
delete dog_controller_;
}
}
virtual Led* GetLed() override {
static SingleLed led(BUILTIN_LED_GPIO);
return &led;
}
virtual AudioCodec* GetAudioCodec() override {
#ifdef AUDIO_I2S_METHOD_SIMPLEX
static NoAudioCodecSimplex audio_codec(AUDIO_INPUT_SAMPLE_RATE, AUDIO_OUTPUT_SAMPLE_RATE,
AUDIO_I2S_SPK_GPIO_BCLK, AUDIO_I2S_SPK_GPIO_LRCK, AUDIO_I2S_SPK_GPIO_DOUT, AUDIO_I2S_MIC_GPIO_SCK, AUDIO_I2S_MIC_GPIO_WS, AUDIO_I2S_MIC_GPIO_DIN);
#else
static NoAudioCodecDuplex audio_codec(AUDIO_INPUT_SAMPLE_RATE, AUDIO_OUTPUT_SAMPLE_RATE,
AUDIO_I2S_GPIO_BCLK, AUDIO_I2S_GPIO_WS, AUDIO_I2S_GPIO_DOUT, AUDIO_I2S_GPIO_DIN);
#endif
return &audio_codec;
}
virtual Display* GetDisplay() override {
return display_;
}
};
DECLARE_BOARD(BreadCompactWifiWithServoBoard);
上面几个文件附下面了:
【提示】
在ESP IDF+ESP32S3小智AI+4舵机=手搓桌面智能小狗狗代码优化(2)- Makelog(造物记)这个帖子中代码进行了修改,去掉了舵机平滑运动机制,小狗运动速度加快了。
相关帖子,可以配合阅读:
ESP IDF+ESP32S3小智AI+4舵机=手搓一个桌面智能小狗狗(1)- Makelog(造物记)
ESP IDF+ESP32S3小智AI+4舵机=手搓桌面智能小狗狗代码优化(2)- Makelog(造物记)
让我的小智AI桌面宠物能唱多多的歌- Makelog(造物记)
虽然还不是个完成度很高的项目,可以给大家提供一些参考的。
附 闪电蘑菇 老师fork的小智1.8.1源码:


 他的勋章
他的勋章

Mosent2025.11.19
老师有交流群聊吗?加不到你wx了
rzyzzxw2025.11.23
没有群,亲
小潘请求支援2025.10.28
请问制作这个要焊接吗
rzyzzxw2025.10.28
要焊接的,小潘老师
小潘请求支援2025.10.28
能不能加个联系方式,我有好多问题想请教一下
rzyzzxw2025.10.28
我的DF用户名就是微信。
rzyzzxw2025.11.23
Vx:rzsyzzxw,前面写错了,亲。
绿色柠檬阿萨姆倭瓜2025.10.19
真厉害
rzyzzxw2025.10.19
谢谢,一起玩起来