 返回首页
返回首页
 回到顶部
回到顶部
10.9
【目标愿景】
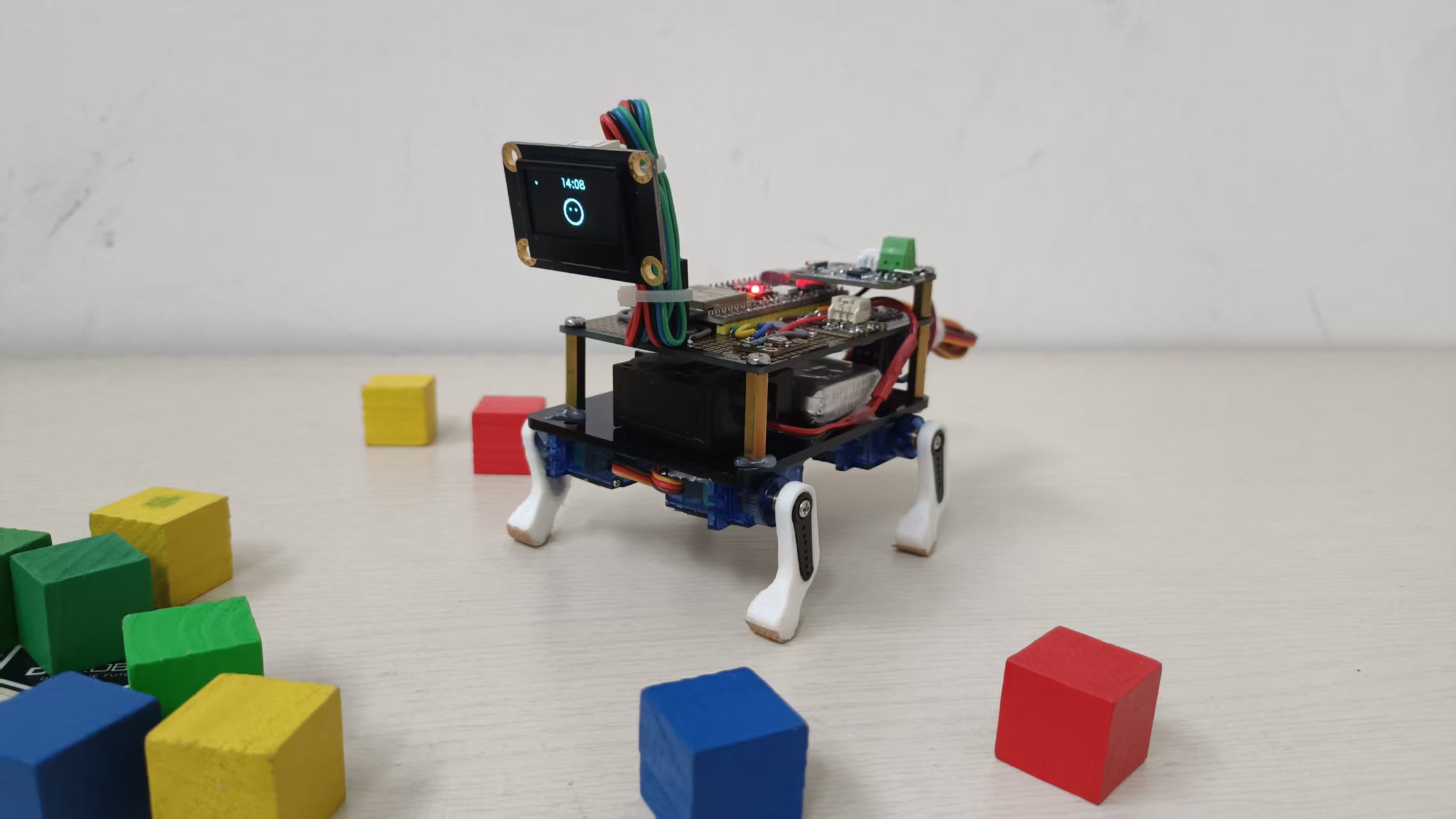
这个帖子是ESP IDF+ESP32S3小智AI+4舵机=手搓一个桌面智能小狗狗- Makelog(造物记)的后续。
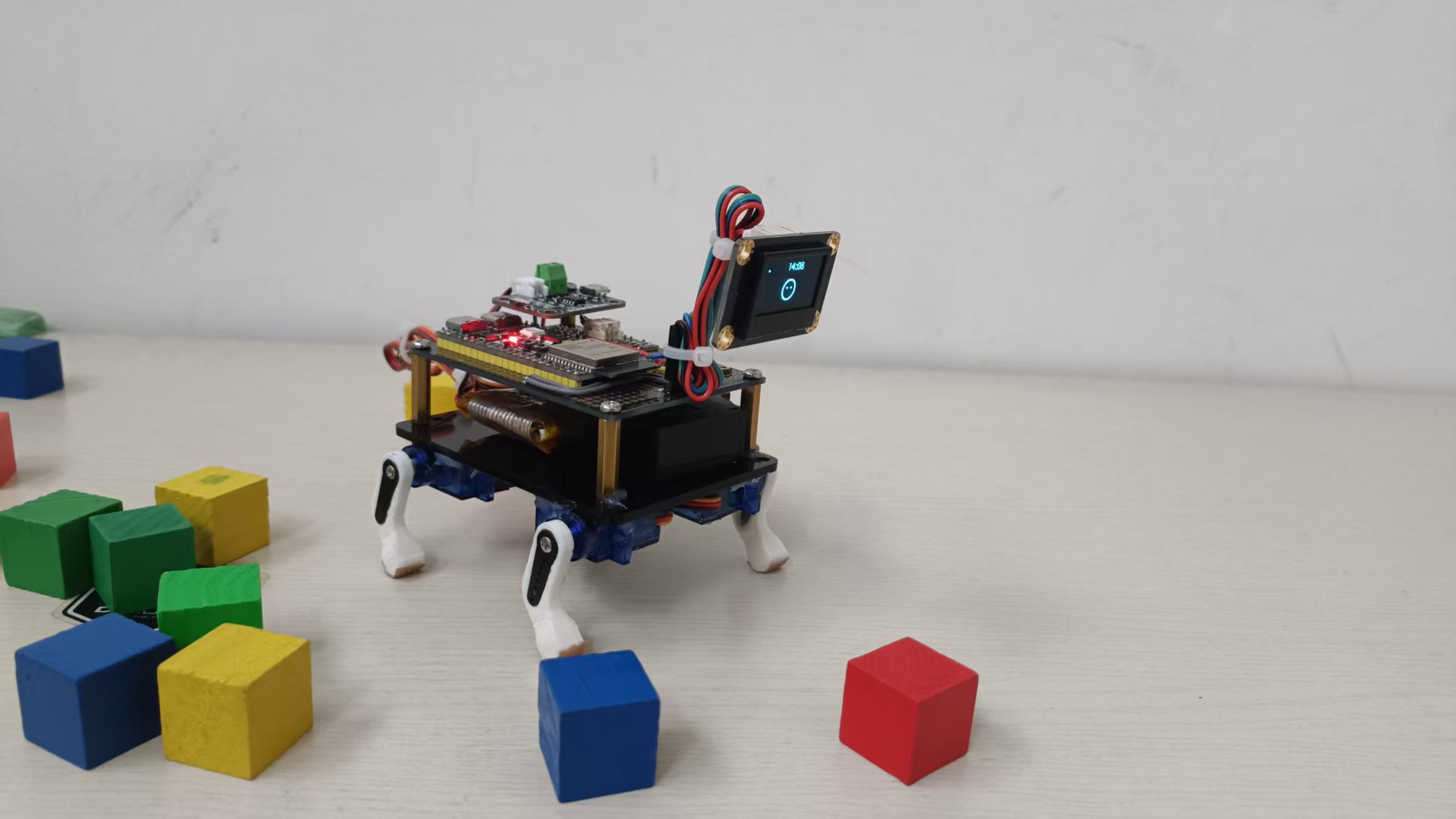 这个桌面小智AI+电子宠物,自己手搓出来的它,虽不完美,我是很喜欢的。
这个桌面小智AI+电子宠物,自己手搓出来的它,虽不完美,我是很喜欢的。
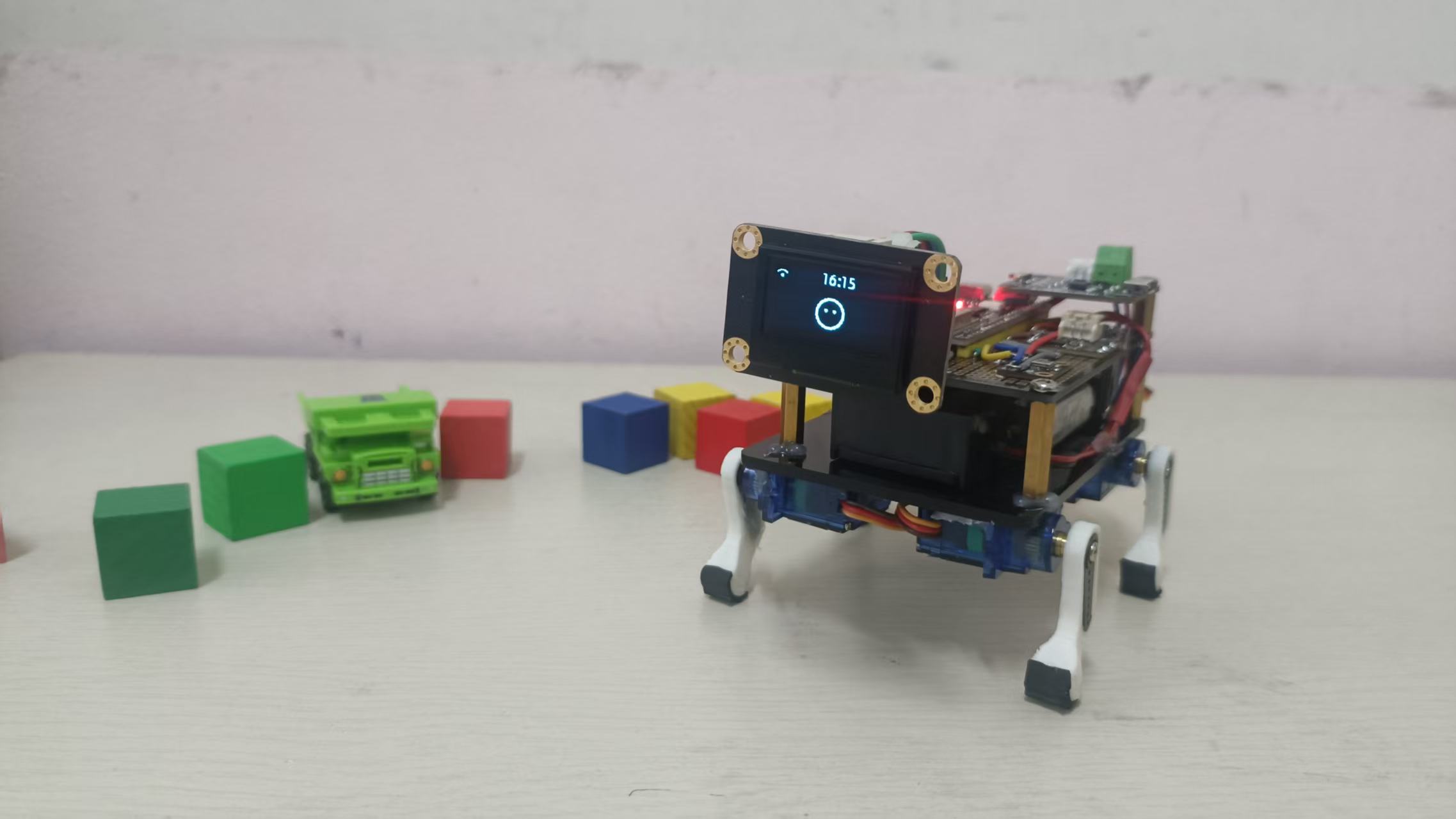
因为喜欢,就想让它有更多进步。比如上一帖子中的AI狗狗基于闪电大佬的舵机平滑运动代码完成的,运动是平滑的,这点很棒,可是却显得AI小狗不够活泼,小小的狗子却稳如老狗……并且动作不够丰富,所以在这个帖子中将记录代码的调整与优化,让更加它活泼灵动且动作丰富。

目标:
1.让动作更活泼,即取消平滑运动,采用直接设置角度,并减少动作间的延迟。
2. 增加动作种类。
材料清单
- 面包板小智AI X1
- MG90 180度舵机 X4
- 3.7V锂电池 X1
步骤1 小智AI桌面宠物小狗的制作
ESP IDF+ESP32S3小智AI+4舵机=手搓一个桌面智能小狗狗- Makelog(造物记)
请注意舵机与腿的安装位置,舵机与ESP32S3开发板GPIO口对应,不同的组装方法、不同的舵机相对位置、腿的长度都会需要调整动作控制代码中舵机的角度以达到理想效果。比如左转、右转两个动作就花费了我大量时间来调试,即使现在也不是最优。


动作代码参考了@米士古 大佬的代码。
步骤2 灵魂代码,不断优化
关键改进总结
取消平滑运动:动作更加快速直接
增加快速设置方法:避免不必要的延迟
丰富动作库:从6个动作扩展到10+个动作
活泼化设计:模仿真实小狗的活泼行为
保持兼容性:原有动作仍然可用
1、软件架构
本项目代码依然是在@闪电蘑菇 大佬开源的小智源码上修改。
2、现有动作如下图所示:
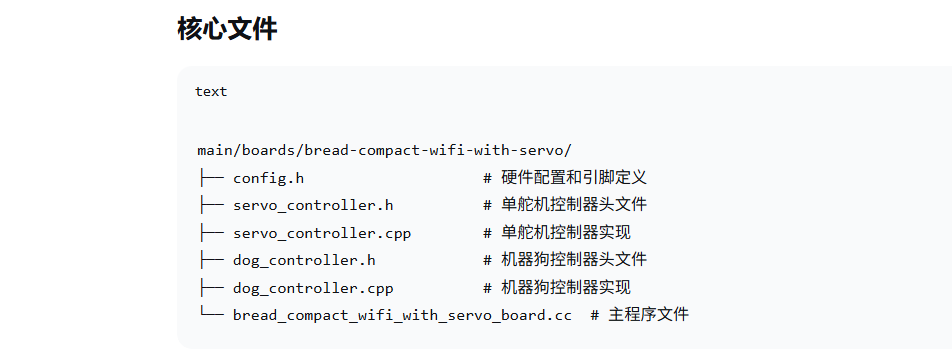
小智AI小狗新版代码有以下6个文件组成:
1. config.h - 硬件配置定义
定义舵机引脚:SERVO_LF_GPIO、SERVO_RF_GPIO、SERVO_LB_GPIO、SERVO_RB_GPIO
舵机参数配置:脉宽、角度范围、默认位置等
#ifndef _BOARD_CONFIG_H_
#define _BOARD_CONFIG_H_
#include <driver/gpio.h>
#define AUDIO_INPUT_SAMPLE_RATE 16000
#define AUDIO_OUTPUT_SAMPLE_RATE 24000
// 如果使用 Duplex I2S 模式,请注释下面一行
#define AUDIO_I2S_METHOD_SIMPLEX
#ifdef AUDIO_I2S_METHOD_SIMPLEX
#define AUDIO_I2S_MIC_GPIO_WS GPIO_NUM_4
#define AUDIO_I2S_MIC_GPIO_SCK GPIO_NUM_5
#define AUDIO_I2S_MIC_GPIO_DIN GPIO_NUM_6
#define AUDIO_I2S_SPK_GPIO_DOUT GPIO_NUM_7
#define AUDIO_I2S_SPK_GPIO_BCLK GPIO_NUM_15
#define AUDIO_I2S_SPK_GPIO_LRCK GPIO_NUM_16
#else
#define AUDIO_I2S_GPIO_WS GPIO_NUM_4
#define AUDIO_I2S_GPIO_BCLK GPIO_NUM_5
#define AUDIO_I2S_GPIO_DIN GPIO_NUM_6
#define AUDIO_I2S_GPIO_DOUT GPIO_NUM_7
#endif
#define BUILTIN_LED_GPIO GPIO_NUM_48
#define BOOT_BUTTON_GPIO GPIO_NUM_0
#define TOUCH_BUTTON_GPIO GPIO_NUM_47
#define VOLUME_UP_BUTTON_GPIO GPIO_NUM_40
#define VOLUME_DOWN_BUTTON_GPIO GPIO_NUM_39
#define DISPLAY_SDA_PIN GPIO_NUM_41
#define DISPLAY_SCL_PIN GPIO_NUM_42
#define DISPLAY_WIDTH 128
#if CONFIG_OLED_SSD1306_128X32
#define DISPLAY_HEIGHT 32
#elif CONFIG_OLED_SSD1306_128X64
#define DISPLAY_HEIGHT 64
#elif CONFIG_OLED_SH1106_128X64
#define DISPLAY_HEIGHT 64
#define SH1106
#else
#error "未选择 OLED 屏幕类型"
#endif
#define DISPLAY_MIRROR_X true
#define DISPLAY_MIRROR_Y true
// 四舵机机器狗引脚定义
#define SERVO_LF_GPIO GPIO_NUM_9 // 左前腿
#define SERVO_RF_GPIO GPIO_NUM_10 // 右前腿
#define SERVO_LB_GPIO GPIO_NUM_11 // 左后退
#define SERVO_RB_GPIO GPIO_NUM_12 // 右后退
// 舵机参数配置
#define SERVO_MIN_PULSEWIDTH_US 500 // 最小脉宽(微秒)对应0度
#define SERVO_MAX_PULSEWIDTH_US 2500 // 最大脉宽(微秒)对应180度
#define SERVO_MIN_DEGREE 0 // 最小角度
#define SERVO_MAX_DEGREE 180 // 最大角度
#define SERVO_TIMEBASE_RESOLUTION_HZ 1000000 // 1MHz, 1us per tick
#define SERVO_TIMEBASE_PERIOD 20000 // 20000 ticks, 20ms (50Hz)
// 舵机默认位置和限制
#define SERVO_DEFAULT_ANGLE 90 // 默认中心位置
#define SERVO_MAX_SPEED_DEGREE_PER_SEC 180 // 最大转速限制
// 板子版本信息
#define BREAD_COMPACT_WIFI_WITH_SERVO_VERSION "1.0.0"
#endif // _BOARD_CONFIG_H_
2. servo_controller.h - 单舵机控制器头文件
定义 ServoController 类
舵机基本控制方法声明
MCP工具接口
#ifndef __SERVO_CONTROLLER_H__
#define __SERVO_CONTROLLER_H__
#include <driver/ledc.h>
#include <driver/gpio.h>
#include <esp_log.h>
#include <freertos/FreeRTOS.h>
#include <freertos/task.h>
#include <freertos/queue.h>
#include <functional>
#include "config.h"
#include "mcp_server.h"
class ServoController {
public:
// 两个构造函数都要声明
ServoController(gpio_num_t servo_pin, ledc_channel_t ledc_channel = LEDC_CHANNEL_0, ledc_timer_t ledc_timer = LEDC_TIMER_0);
ServoController(gpio_num_t servo_pin); // 单参数构造函数
~ServoController();
// 基本控制方法
bool Initialize();
void InitializeTools();
void SetAngle(int angle);
int GetCurrentAngle() const { return current_angle_; }
// 新增快速设置方法
void SetAngleDirect(int angle);
// 运动控制方法
void RotateClockwise(int degrees);
void RotateCounterclockwise(int degrees);
void SweepBetween(int min_angle, int max_angle, int speed_ms = 1000);
void Stop();
void Reset();
// 状态查询
bool IsMoving() const { return is_moving_; }
bool IsSweeping() const { return is_sweeping_; }
// 设置回调函数
void SetOnMoveCompleteCallback(std::function<void()> callback) {
on_move_complete_callback_ = callback;
}
private:
// 硬件相关
gpio_num_t servo_pin_;
ledc_channel_t ledc_channel_;
ledc_timer_t ledc_timer_;
// 状态变量
int current_angle_;
int target_angle_;
bool is_moving_;
bool is_sweeping_;
bool stop_requested_;
// 任务和队列
TaskHandle_t servo_task_handle_;
QueueHandle_t command_queue_;
// 回调函数
std::function<void()> on_move_complete_callback_;
// 命令类型
enum CommandType {
CMD_SET_ANGLE,
CMD_ROTATE_CW,
CMD_ROTATE_CCW,
CMD_SWEEP,
CMD_STOP,
CMD_RESET
};
// 命令结构
struct ServoCommand {
CommandType type;
int param1;
int param2;
int param3;
};
// 私有方法
void WriteAngle(int angle);
uint32_t AngleToCompare(int angle);
bool IsValidAngle(int angle) const;
int ConstrainAngle(int angle) const;
// 任务函数
static void ServoTask(void* parameter);
void ProcessCommands();
void ExecuteSetAngle(int angle);
void ExecuteRotate(int degrees, bool clockwise);
void ExecuteSweep(int min_angle, int max_angle, int speed_ms);
};
#endif // __SERVO_CONTROLLER_H__3. servo_controller.cc - 单舵机控制器实现
ServoController 类的具体实现
PWM控制、角度转换等核心功能
MCP工具注册
#include "servo_controller.h"
#include <esp_log.h>
#include <cmath>
#define TAG "ServoController"
// 三参数构造函数
ServoController::ServoController(gpio_num_t servo_pin, ledc_channel_t ledc_channel, ledc_timer_t ledc_timer)
: servo_pin_(servo_pin)
, ledc_channel_(ledc_channel)
, ledc_timer_(ledc_timer)
, current_angle_(SERVO_DEFAULT_ANGLE)
, target_angle_(SERVO_DEFAULT_ANGLE)
, is_moving_(false)
, is_sweeping_(false)
, stop_requested_(false)
, servo_task_handle_(nullptr)
, command_queue_(nullptr)
, on_move_complete_callback_(nullptr) {
}
// 单参数构造函数(调用三参数构造函数)
ServoController::ServoController(gpio_num_t servo_pin)
: ServoController(servo_pin, LEDC_CHANNEL_0, LEDC_TIMER_0) {
}
ServoController::~ServoController() {
Stop();
if (servo_task_handle_ != nullptr) {
vTaskDelete(servo_task_handle_);
}
if (command_queue_ != nullptr) {
vQueueDelete(command_queue_);
}
}
bool ServoController::Initialize() {
ESP_LOGI(TAG, "初始化SG90舵机控制器,引脚: %d", servo_pin_);
// 配置LEDC定时器
ledc_timer_config_t timer_config = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.duty_resolution = LEDC_TIMER_14_BIT,
.timer_num = ledc_timer_,
.freq_hz = 50,
.clk_cfg = LEDC_AUTO_CLK
};
esp_err_t ret = ledc_timer_config(&timer_config);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "LEDC定时器配置失败: %s", esp_err_to_name(ret));
return false;
}
// 配置LEDC通道
ledc_channel_config_t channel_config = {
.gpio_num = servo_pin_,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = ledc_channel_,
.intr_type = LEDC_INTR_DISABLE,
.timer_sel = ledc_timer_,
.duty = 0,
.hpoint = 0
};
ret = ledc_channel_config(&channel_config);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "LEDC通道配置失败: %s", esp_err_to_name(ret));
return false;
}
// 创建命令队列
command_queue_ = xQueueCreate(10, sizeof(ServoCommand));
if (command_queue_ == nullptr) {
ESP_LOGE(TAG, "创建命令队列失败");
return false;
}
// 创建舵机控制任务
BaseType_t task_ret = xTaskCreate(
ServoTask,
"servo_task",
4096,
this,
5,
&servo_task_handle_
);
if (task_ret != pdPASS) {
ESP_LOGE(TAG, "创建舵机任务失败");
return false;
}
// 设置初始位置
WriteAngle(current_angle_);
ESP_LOGI(TAG, "SG90舵机控制器初始化成功");
return true;
}
void ServoController::InitializeTools() {
auto& mcp_server = McpServer::GetInstance();
ESP_LOGI(TAG, "开始注册舵机MCP工具...");
// 设置舵机角度
mcp_server.AddTool("self.servo.set_angle",
"设置SG90舵机到指定角度。angle: 目标角度(0-180度)",
PropertyList({Property("angle", kPropertyTypeInteger, 90, 0, 180)}),
[this](const PropertyList& properties) -> ReturnValue {
int angle = properties["angle"].value<int>();
SetAngle(angle);
return "舵机设置到 " + std::to_string(angle) + " 度";
});
// 顺时针旋转
mcp_server.AddTool("self.servo.rotate_clockwise",
"顺时针旋转SG90舵机指定角度。degrees: 旋转角度(1-180度)",
PropertyList({Property("degrees", kPropertyTypeInteger, 30, 1, 180)}),
[this](const PropertyList& properties) -> ReturnValue {
int degrees = properties["degrees"].value<int>();
RotateClockwise(degrees);
return "舵机顺时针旋转 " + std::to_string(degrees) + " 度";
});
// 逆时针旋转
mcp_server.AddTool("self.servo.rotate_counterclockwise",
"逆时针旋转SG90舵机指定角度。degrees: 旋转角度(1-180度)",
PropertyList({Property("degrees", kPropertyTypeInteger, 30, 1, 180)}),
[this](const PropertyList& properties) -> ReturnValue {
int degrees = properties["degrees"].value<int>();
RotateCounterclockwise(degrees);
return "舵机逆时针旋转 " + std::to_string(degrees) + " 度";
});
// 获取当前位置
mcp_server.AddTool("self.servo.get_position",
"获取SG90舵机当前角度位置",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
int angle = GetCurrentAngle();
return "当前舵机角度: " + std::to_string(angle) + " 度";
});
// 扫描模式
mcp_server.AddTool("self.servo.sweep",
"SG90舵机扫描模式,在指定角度范围内来回摆动。"
"min_angle: 最小角度(0-179度); max_angle: 最大角度(1-180度); "
"speed: 摆动速度,毫秒(100-5000ms)",
PropertyList({Property("min_angle", kPropertyTypeInteger, 0, 0, 179),
Property("max_angle", kPropertyTypeInteger, 180, 1, 180),
Property("speed", kPropertyTypeInteger, 1000, 100, 5000)}),
[this](const PropertyList& properties) -> ReturnValue {
int min_angle = properties["min_angle"].value<int>();
int max_angle = properties["max_angle"].value<int>();
int speed = properties["speed"].value<int>();
SweepBetween(min_angle, max_angle, speed);
return "开始扫描模式: " + std::to_string(min_angle) + "° - " +
std::to_string(max_angle) + "°";
});
// 停止舵机
mcp_server.AddTool("self.servo.stop",
"立即停止SG90舵机运动",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
Stop();
return "舵机已停止";
});
// 复位到中心位置
mcp_server.AddTool("self.servo.reset",
"将SG90舵机复位到中心位置(90度)",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
Reset();
return "舵机已复位到中心位置(90度)";
});
// 获取舵机状态
mcp_server.AddTool("self.servo.get_status",
"获取SG90舵机当前状态",
PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
int angle = GetCurrentAngle();
bool moving = IsMoving();
bool sweeping = IsSweeping();
std::string status = "{\"angle\":" + std::to_string(angle) +
",\"moving\":" + (moving ? "true" : "false") +
",\"sweeping\":" + (sweeping ? "true" : "false") + "}";
return status;
});
ESP_LOGI(TAG, "舵机MCP工具注册完成");
}
void ServoController::SetAngle(int angle) {
if (!IsValidAngle(angle)) {
ESP_LOGW(TAG, "无效角度: %d,将限制在有效范围内", angle);
angle = ConstrainAngle(angle);
}
ServoCommand cmd = {CMD_SET_ANGLE, angle, 0, 0};
xQueueSend(command_queue_, &cmd, portMAX_DELAY);
}
void ServoController::SetAngleDirect(int angle) {
if (!IsValidAngle(angle)) {
ESP_LOGW(TAG, "无效角度: %d,将限制在有效范围内", angle);
angle = ConstrainAngle(angle);
}
ESP_LOGI(TAG, "快速设置舵机角度: %d度", angle);
WriteAngle(angle);
}
void ServoController::RotateClockwise(int degrees) {
if (degrees <= 0) {
ESP_LOGW(TAG, "旋转角度必须大于0");
return;
}
ServoCommand cmd = {CMD_ROTATE_CW, degrees, 0, 0};
xQueueSend(command_queue_, &cmd, portMAX_DELAY);
}
void ServoController::RotateCounterclockwise(int degrees) {
if (degrees <= 0) {
ESP_LOGW(TAG, "旋转角度必须大于0");
return;
}
ServoCommand cmd = {CMD_ROTATE_CCW, degrees, 0, 0};
xQueueSend(command_queue_, &cmd, portMAX_DELAY);
}
void ServoController::SweepBetween(int min_angle, int max_angle, int speed_ms) {
if (!IsValidAngle(min_angle) || !IsValidAngle(max_angle)) {
ESP_LOGW(TAG, "扫描角度范围无效: %d - %d", min_angle, max_angle);
return;
}
if (min_angle >= max_angle) {
ESP_LOGW(TAG, "最小角度必须小于最大角度");
return;
}
ServoCommand cmd = {CMD_SWEEP, min_angle, max_angle, speed_ms};
xQueueSend(command_queue_, &cmd, portMAX_DELAY);
}
void ServoController::Stop() {
stop_requested_ = true;
ServoCommand cmd = {CMD_STOP, 0, 0, 0};
xQueueSend(command_queue_, &cmd, 0);
}
void ServoController::Reset() {
ServoCommand cmd = {CMD_RESET, SERVO_DEFAULT_ANGLE, 0, 0};
xQueueSend(command_queue_, &cmd, portMAX_DELAY);
}
void ServoController::WriteAngle(int angle) {
angle = ConstrainAngle(angle);
uint32_t compare_value = AngleToCompare(angle);
ledc_set_duty(LEDC_LOW_SPEED_MODE, ledc_channel_, compare_value);
ledc_update_duty(LEDC_LOW_SPEED_MODE, ledc_channel_);
current_angle_ = angle;
}
uint32_t ServoController::AngleToCompare(int angle) {
float pulse_width_ms = 0.5f + (angle / 180.0f) * 2.0f;
float duty_cycle = pulse_width_ms / 20.0f;
uint32_t compare_value = (uint32_t)(duty_cycle * 16383);
return compare_value;
}
bool ServoController::IsValidAngle(int angle) const {
return angle >= SERVO_MIN_DEGREE && angle <= SERVO_MAX_DEGREE;
}
int ServoController::ConstrainAngle(int angle) const {
if (angle < SERVO_MIN_DEGREE) return SERVO_MIN_DEGREE;
if (angle > SERVO_MAX_DEGREE) return SERVO_MAX_DEGREE;
return angle;
}
void ServoController::ServoTask(void* parameter) {
ServoController* controller = static_cast<ServoController*>(parameter);
controller->ProcessCommands();
}
void ServoController::ProcessCommands() {
ServoCommand cmd;
while (true) {
if (xQueueReceive(command_queue_, &cmd, pdMS_TO_TICKS(100)) == pdTRUE) {
if (stop_requested_ && cmd.type != CMD_STOP) {
continue;
}
switch (cmd.type) {
case CMD_SET_ANGLE:
ExecuteSetAngle(cmd.param1);
break;
case CMD_ROTATE_CW:
ExecuteRotate(cmd.param1, true);
break;
case CMD_ROTATE_CCW:
ExecuteRotate(cmd.param1, false);
break;
case CMD_SWEEP:
ExecuteSweep(cmd.param1, cmd.param2, cmd.param3);
break;
case CMD_STOP:
is_moving_ = false;
is_sweeping_ = false;
stop_requested_ = false;
ESP_LOGI(TAG, "舵机停止");
break;
case CMD_RESET:
ExecuteSetAngle(cmd.param1);
break;
}
}
}
}
void ServoController::ExecuteSetAngle(int angle) {
ESP_LOGI(TAG, "设置舵机角度: %d度", angle);
is_moving_ = true;
// 直接设置角度,不使用平滑运动
SetAngleDirect(angle);
is_moving_ = false;
if (on_move_complete_callback_) {
on_move_complete_callback_();
}
}
void ServoController::ExecuteRotate(int degrees, bool clockwise) {
int target = current_angle_ + (clockwise ? degrees : -degrees);
target = ConstrainAngle(target);
ESP_LOGI(TAG, "%s旋转 %d度,从 %d度 到 %d度",
clockwise ? "顺时针" : "逆时针", degrees, current_angle_, target);
is_moving_ = true;
// 直接设置角度,不使用平滑运动
SetAngleDirect(target);
is_moving_ = false;
if (on_move_complete_callback_) {
on_move_complete_callback_();
}
}
void ServoController::ExecuteSweep(int min_angle, int max_angle, int speed_ms) {
ESP_LOGI(TAG, "开始扫描模式: %d度 - %d度,速度: %dms", min_angle, max_angle, speed_ms);
is_sweeping_ = true;
is_moving_ = true;
bool direction = true;
while (is_sweeping_ && !stop_requested_) {
int target = direction ? max_angle : min_angle;
// 直接设置角度,不使用平滑运动
SetAngleDirect(target);
// 使用延迟来控制扫描速度
vTaskDelay(pdMS_TO_TICKS(speed_ms));
if (stop_requested_) break;
direction = !direction;
vTaskDelay(pdMS_TO_TICKS(100));
}
is_sweeping_ = false;
is_moving_ = false;
ESP_LOGI(TAG, "扫描模式结束");
if (on_move_complete_callback_) {
on_move_complete_callback_();
}
}4. dog_controller.h - 机器狗控制器头文件
定义 DogController 类
动作枚举和腿类型定义
所有动作方法的声明
#ifndef __DOG_CONTROLLER_H__
#define __DOG_CONTROLLER_H__
#include "servo_controller.h"
#include "config.h"
#include <vector>
#include <map>
// 腿的类型定义
enum LegType {
LEG_LEFT_FRONT = 0,
LEG_RIGHT_FRONT = 1,
LEG_LEFT_BACK = 2,
LEG_RIGHT_BACK = 3
};
// 动作类型定义
enum DogAction {
ACTION_STAND = 0,
ACTION_SIT,
ACTION_LIE_DOWN,
ACTION_STRETCH,
ACTION_WAVE,
ACTION_WALK_FORWARD,
ACTION_WALK_BACKWARD,
ACTION_TURN_LEFT, // 新增:左转
ACTION_TURN_RIGHT, // 新增:右转
ACTION_SHAKE_BODY,
ACTION_DANCE,
ACTION_BOW,
ACTION_SHAKE_HEAD,
ACTION_JUMP, // 新增:跳跃
ACTION_TAIL_WAG, // 新增:摇尾巴
ACTION_SCRATCH, // 新增:挠痒痒
ACTION_SPIN // 新增:转圈
};
class DogController {
public:
DogController();
~DogController();
bool Initialize();
void InitializeTools();
// 基本动作控制(保持原有稳定版本)
void Stand();
void Sit();
void LieDown();
void Stretch();
void Wave();
void WalkForward(int steps = 1);
void WalkBackward(int steps = 1);
void ShakeBody();
void Dance();
void Bow();
void ShakeHead();
// 新增动作
void TurnLeft(int steps = 1); // 左转
void TurnRight(int steps = 1); // 右转
void ExcitedJump(); // 兴奋跳跃
void TailWag(); // 摇尾巴
void Scratch(); // 挠痒痒
void Spin(); // 转圈
// 停止所有动作
void StopAll();
// 状态查询
bool IsMoving() const;
DogAction GetCurrentAction() const { return current_action_; }
private:
std::vector<ServoController*> servos_;
DogAction current_action_;
bool is_moving_;
// 舵机校准参数
struct LegCalibration {
int stand_angle;
int sit_angle;
int lie_angle;
int forward_offset;
};
std::map<LegType, LegCalibration> leg_calibration_;
void InitializeCalibration();
// 原有稳定方法
void SetLegAngle(LegType leg, int angle, int speed_ms = 500);
void SetAllLegs(int lf_angle, int rf_angle, int lb_angle, int rb_angle, int speed_ms = 500);
// 新增快速方法(不经过平滑运动)
void QuickSetLegAngle(LegType leg, int angle);
void QuickSetAllLegs(int lf_angle, int rf_angle, int lb_angle, int rb_angle);
// 动作执行函数
void ExecuteStand();
void ExecuteSit();
void ExecuteLieDown();
void ExecuteStretch();
void ExecuteWave();
void ExecuteWalkForward(int steps);
void ExecuteWalkBackward(int steps);
void ExecuteShakeBody();
void ExecuteDance();
void ExecuteBow();
void ExecuteShakeHead();
// 新增动作执行函数
void ExecuteTurnLeft(int steps);
void ExecuteTurnRight(int steps);
void ExecuteExcitedJump();
void ExecuteTailWag();
void ExecuteScratch();
void ExecuteSpin();
bool AllServosReady() const;
};
#endif // __DOG_CONTROLLER_H__5. dog_controller.cc - 机器狗控制器实现
四舵机协同控制逻辑
站立、坐下、趴下、前进、后退、转向等动作实现
完整的MCP工具注册
#机器狗动作编排与调试的重点文件
#增加动作与动作的打磨都要在这个文件中进行
#include "dog_controller.h"
#include "mcp_server.h"
#include <esp_log.h>
#define TAG "DogController"
DogController::DogController()
: current_action_(ACTION_STAND)
, is_moving_(false) {
servos_.push_back(new ServoController(SERVO_LF_GPIO, LEDC_CHANNEL_0, LEDC_TIMER_0));
servos_.push_back(new ServoController(SERVO_RF_GPIO, LEDC_CHANNEL_1, LEDC_TIMER_0));
servos_.push_back(new ServoController(SERVO_LB_GPIO, LEDC_CHANNEL_2, LEDC_TIMER_0));
servos_.push_back(new ServoController(SERVO_RB_GPIO, LEDC_CHANNEL_3, LEDC_TIMER_0));
InitializeCalibration();
}
DogController::~DogController() {
StopAll();
for (auto servo : servos_) {
if (servo != nullptr) {
delete servo;
}
}
servos_.clear();
}
bool DogController::Initialize() {
ESP_LOGI(TAG, "初始化四舵机机器狗控制器");
for (int i = 0; i < servos_.size(); i++) {
if (servos_[i] != nullptr && !servos_[i]->Initialize()) {
ESP_LOGE(TAG, "舵机 %d 初始化失败", i);
return false;
}
}
vTaskDelay(pdMS_TO_TICKS(1000));
Stand();
ESP_LOGI(TAG, "机器狗控制器初始化成功");
return true;
}
void DogController::InitializeCalibration() {
leg_calibration_[LEG_LEFT_FRONT] = {90, 60, 20, -30};
leg_calibration_[LEG_RIGHT_FRONT] = {90, 120, 160, 30};
leg_calibration_[LEG_LEFT_BACK] = {90, 45, 30, -30};
leg_calibration_[LEG_RIGHT_BACK] = {90, 135, 150, 30};
}
// ========== 快速设置方法 ==========
void DogController::QuickSetLegAngle(LegType leg, int angle) {
if (leg < servos_.size() && servos_[leg] != nullptr) {
servos_[leg]->SetAngleDirect(angle); // 使用 SetAngleDirect 而不是 SetAngle
}
}
void DogController::QuickSetAllLegs(int lf_angle, int rf_angle, int lb_angle, int rb_angle) {
if (servos_[LEG_LEFT_FRONT] != nullptr) {
servos_[LEG_LEFT_FRONT]->SetAngleDirect(lf_angle);
}
if (servos_[LEG_RIGHT_FRONT] != nullptr) {
servos_[LEG_RIGHT_FRONT]->SetAngleDirect(rf_angle);
}
if (servos_[LEG_LEFT_BACK] != nullptr) {
servos_[LEG_LEFT_BACK]->SetAngleDirect(lb_angle);
}
if (servos_[LEG_RIGHT_BACK] != nullptr) {
servos_[LEG_RIGHT_BACK]->SetAngleDirect(rb_angle);
}
}
// ========== 原有稳定动作(保持不变) ==========
void DogController::Stand() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行起立站立动作");
current_action_ = ACTION_STAND;
is_moving_ = true;
ExecuteStand();
is_moving_ = false;
}
void DogController::Sit() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行坐下动作");
current_action_ = ACTION_SIT;
is_moving_ = true;
ExecuteSit();
is_moving_ = false;
}
void DogController::LieDown() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行趴下动作");
current_action_ = ACTION_LIE_DOWN;
is_moving_ = true;
ExecuteLieDown();
is_moving_ = false;
}
void DogController::Stretch() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行伸懒腰动作");
current_action_ = ACTION_STRETCH;
is_moving_ = true;
ExecuteStretch();
is_moving_ = false;
}
void DogController::Wave() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行挥手招手打招呼动作");
current_action_ = ACTION_WAVE;
is_moving_ = true;
ExecuteWave();
is_moving_ = false;
}
void DogController::WalkForward(int steps) {
if (is_moving_) return;
ESP_LOGI(TAG, "执行前进动作,步数: %d", steps);
current_action_ = ACTION_WALK_FORWARD;
is_moving_ = true;
ExecuteWalkForward(steps);
is_moving_ = false;
}
void DogController::WalkBackward(int steps) {
if (is_moving_) return;
ESP_LOGI(TAG, "执行后退动作,步数: %d", steps);
current_action_ = ACTION_WALK_BACKWARD;
is_moving_ = true;
ExecuteWalkBackward(steps);
is_moving_ = false;
}
void DogController::ShakeBody() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行摇摆身体动作");
current_action_ = ACTION_SHAKE_BODY;
is_moving_ = true;
ExecuteShakeBody();
is_moving_ = false;
}
void DogController::Dance() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行跳舞动作");
current_action_ = ACTION_DANCE;
is_moving_ = true;
ExecuteDance();
is_moving_ = false;
}
void DogController::Bow() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行鞠躬动作");
current_action_ = ACTION_BOW;
is_moving_ = true;
ExecuteBow();
is_moving_ = false;
}
void DogController::ShakeHead() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行摇头动作");
current_action_ = ACTION_SHAKE_HEAD;
is_moving_ = true;
ExecuteShakeHead();
is_moving_ = false;
}
// ========== 新增动作 ==========
void DogController::TurnLeft(int steps) {
if (is_moving_) return;
ESP_LOGI(TAG, "执行左转动作,步数: %d", steps);
current_action_ = ACTION_TURN_LEFT;
is_moving_ = true;
ExecuteTurnLeft(steps);
is_moving_ = false;
}
void DogController::TurnRight(int steps) {
if (is_moving_) return;
ESP_LOGI(TAG, "执行右转动作,步数: %d", steps);
current_action_ = ACTION_TURN_RIGHT;
is_moving_ = true;
ExecuteTurnRight(steps);
is_moving_ = false;
}
void DogController::ExcitedJump() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行兴奋跳跃动作");
current_action_ = ACTION_JUMP;
is_moving_ = true;
ExecuteExcitedJump();
is_moving_ = false;
}
void DogController::TailWag() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行摇尾巴动作");
current_action_ = ACTION_TAIL_WAG;
is_moving_ = true;
ExecuteTailWag();
is_moving_ = false;
}
void DogController::Scratch() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行挠痒痒动作");
current_action_ = ACTION_SCRATCH;
is_moving_ = true;
ExecuteScratch();
is_moving_ = false;
}
void DogController::Spin() {
if (is_moving_) return;
ESP_LOGI(TAG, "执行转圈动作");
current_action_ = ACTION_SPIN;
is_moving_ = true;
ExecuteSpin();
is_moving_ = false;
}
// ========== 动作执行实现 ==========
// 原有稳定动作实现(保持不变)站立
void DogController::ExecuteStand() {
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle,
400
);
}
// 坐下
void DogController::ExecuteSit() {
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].sit_angle,
leg_calibration_[LEG_RIGHT_BACK].sit_angle,
400
);
}
// 趴下
void DogController::ExecuteLieDown() {
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].lie_angle,
leg_calibration_[LEG_RIGHT_FRONT].lie_angle,
leg_calibration_[LEG_LEFT_BACK].lie_angle,
leg_calibration_[LEG_RIGHT_BACK].lie_angle,
600
);
}
// 伸懒腰
void DogController::ExecuteStretch() {
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle - 60,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 60,
leg_calibration_[LEG_LEFT_BACK].stand_angle + 60,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - 60,
400
);
vTaskDelay(pdMS_TO_TICKS(1000));
ExecuteStand();
}
// 挥手
void DogController::ExecuteWave() {
ExecuteSit();
for (int i = 0; i < 3; i++) {
SetLegAngle(LEG_RIGHT_FRONT,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 90, 150);
vTaskDelay(pdMS_TO_TICKS(100));
SetLegAngle(LEG_RIGHT_FRONT,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 60, 150);
vTaskDelay(pdMS_TO_TICKS(100));
}
ExecuteStand();
}
// 前进
void DogController::ExecuteWalkForward(int steps) {
for (int step = 0; step < steps ; step++) {
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle + leg_calibration_[LEG_LEFT_FRONT].forward_offset,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle + leg_calibration_[LEG_RIGHT_BACK].forward_offset,
300
);
vTaskDelay(pdMS_TO_TICKS(100));
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle - leg_calibration_[LEG_RIGHT_FRONT].forward_offset,
leg_calibration_[LEG_LEFT_BACK].stand_angle - leg_calibration_[LEG_LEFT_BACK].forward_offset,
leg_calibration_[LEG_RIGHT_BACK].stand_angle,
300
);
vTaskDelay(pdMS_TO_TICKS(100));
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + leg_calibration_[LEG_RIGHT_FRONT].forward_offset,
leg_calibration_[LEG_LEFT_BACK].stand_angle + leg_calibration_[LEG_LEFT_BACK].forward_offset,
leg_calibration_[LEG_RIGHT_BACK].stand_angle,
300
);
vTaskDelay(pdMS_TO_TICKS(100));
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle - leg_calibration_[LEG_LEFT_FRONT].forward_offset,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - leg_calibration_[LEG_RIGHT_BACK].forward_offset,
300
);
vTaskDelay(pdMS_TO_TICKS(100));
}
ExecuteStand();
}
// 后退
void DogController::ExecuteWalkBackward(int steps) {
for (int step = 0; step < steps ; step++) {
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle - leg_calibration_[LEG_LEFT_FRONT].forward_offset,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - leg_calibration_[LEG_RIGHT_BACK].forward_offset,
300
);
vTaskDelay(pdMS_TO_TICKS(100));
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + leg_calibration_[LEG_RIGHT_FRONT].forward_offset,
leg_calibration_[LEG_LEFT_BACK].stand_angle + leg_calibration_[LEG_LEFT_BACK].forward_offset,
leg_calibration_[LEG_RIGHT_BACK].stand_angle,
300
);
vTaskDelay(pdMS_TO_TICKS(100));
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle - leg_calibration_[LEG_RIGHT_FRONT].forward_offset,
leg_calibration_[LEG_LEFT_BACK].stand_angle - leg_calibration_[LEG_LEFT_BACK].forward_offset,
leg_calibration_[LEG_RIGHT_BACK].stand_angle,
300
);
vTaskDelay(pdMS_TO_TICKS(100));
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle + leg_calibration_[LEG_LEFT_FRONT].forward_offset,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle + leg_calibration_[LEG_RIGHT_BACK].forward_offset,
300
);
vTaskDelay(pdMS_TO_TICKS(100));
}
ExecuteStand();
}
// 摇晃身体
void DogController::ExecuteShakeBody() {
for (int i = 0; i < 4; i++) {
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle - 20,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 20,
leg_calibration_[LEG_LEFT_BACK].stand_angle - 20,
leg_calibration_[LEG_RIGHT_BACK].stand_angle + 20,
200
);
vTaskDelay(pdMS_TO_TICKS(100));
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle + 20,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle - 20,
leg_calibration_[LEG_LEFT_BACK].stand_angle + 20,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - 20,
200
);
vTaskDelay(pdMS_TO_TICKS(100));
}
ExecuteStand();
}
// 跳舞
void DogController::ExecuteDance() {
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle + 45,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 45,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle,
100
);
vTaskDelay(pdMS_TO_TICKS(100));
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle - 45,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - 45,
100
);
vTaskDelay(pdMS_TO_TICKS(100));
for (int i = 0; i < 3; i++) {
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle - 30,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 30,
leg_calibration_[LEG_LEFT_BACK].stand_angle - 30,
leg_calibration_[LEG_RIGHT_BACK].stand_angle + 30,
100
);
vTaskDelay(pdMS_TO_TICKS(100));
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle + 30,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle - 30,
leg_calibration_[LEG_LEFT_BACK].stand_angle + 30,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - 30,
100
);
vTaskDelay(pdMS_TO_TICKS(100));
}
for (int i = 0; i < 3; i++) {
QuickSetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle - 20,
leg_calibration_[LEG_RIGHT_BACK].stand_angle + 20
);
vTaskDelay(pdMS_TO_TICKS(100));
QuickSetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle + 20,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - 20
);
vTaskDelay(pdMS_TO_TICKS(100));
}
ExecuteStand();
}
// 鞠躬
void DogController::ExecuteBow() {
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].sit_angle,
leg_calibration_[LEG_RIGHT_FRONT].sit_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle,
500
);
vTaskDelay(pdMS_TO_TICKS(1000));
ExecuteStand();
}
// 摇摇头
void DogController::ExecuteShakeHead() {
for (int i = 0; i < 3; i++) {
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle - 40,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 40,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle,
200
);
vTaskDelay(pdMS_TO_TICKS(100));
SetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle + 40,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle - 40,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle,
200
);
vTaskDelay(pdMS_TO_TICKS(100));
}
ExecuteStand();
}
// ========== 新增动作实现 ==========
// 左转
void DogController::ExecuteTurnLeft(int steps) {
for (int step = 0; step < steps; step++) {
QuickSetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 30,
leg_calibration_[LEG_LEFT_BACK].stand_angle + 30,
leg_calibration_[LEG_RIGHT_BACK].stand_angle
);
vTaskDelay(pdMS_TO_TICKS(80));
QuickSetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle - 30,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 30,
leg_calibration_[LEG_LEFT_BACK].stand_angle + 30,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - 30
);
vTaskDelay(pdMS_TO_TICKS(80));
ExecuteStand();
vTaskDelay(pdMS_TO_TICKS(80));
}
}
// 右转
void DogController::ExecuteTurnRight(int steps) {
// 明确注释为左转的镜像
for (int step = 0; step < steps; step++) {
QuickSetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle - 30 ,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - 30
);
vTaskDelay(pdMS_TO_TICKS(80));
QuickSetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle + 30,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 30,
leg_calibration_[LEG_LEFT_BACK].stand_angle + 30,
leg_calibration_[LEG_RIGHT_BACK].stand_angle + 30
);
vTaskDelay(pdMS_TO_TICKS(80));
ExecuteStand();
vTaskDelay(pdMS_TO_TICKS(80));
}
}
// 兴奋跳跃
void DogController::ExecuteExcitedJump() {
// 快速下蹲准备
ExecuteSit();
vTaskDelay(pdMS_TO_TICKS(100));
// 跳跃动作
QuickSetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle - 45,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle + 45,
leg_calibration_[LEG_LEFT_BACK].stand_angle - 45,
leg_calibration_[LEG_RIGHT_BACK].stand_angle + 45
);
vTaskDelay(pdMS_TO_TICKS(80));
ExecuteStand();
for (int i = 0; i < 6; i++) {
QuickSetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle - 30,
leg_calibration_[LEG_RIGHT_BACK].stand_angle + 30
);
vTaskDelay(pdMS_TO_TICKS(100));
QuickSetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle + 30,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - 30
);
vTaskDelay(pdMS_TO_TICKS(100));
}
ExecuteStand();
}
// 摇尾巴
void DogController::ExecuteTailWag() {
for (int i = 0; i < 6; i++) {
QuickSetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle - 20,
leg_calibration_[LEG_RIGHT_BACK].stand_angle + 20
);
vTaskDelay(pdMS_TO_TICKS(200));
QuickSetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle + 20,
leg_calibration_[LEG_RIGHT_BACK].stand_angle - 20
);
vTaskDelay(pdMS_TO_TICKS(200));
}
ExecuteStand();
}
// 挠痒痒
void DogController::ExecuteScratch() {
for (int i = 0; i < 4; i++) {
QuickSetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle + 60,
leg_calibration_[LEG_RIGHT_BACK].stand_angle
);
vTaskDelay(pdMS_TO_TICKS(120));
QuickSetAllLegs(
leg_calibration_[LEG_LEFT_FRONT].stand_angle,
leg_calibration_[LEG_RIGHT_FRONT].stand_angle,
leg_calibration_[LEG_LEFT_BACK].stand_angle,
leg_calibration_[LEG_RIGHT_BACK].stand_angle
);
vTaskDelay(pdMS_TO_TICKS(120));
}
ExecuteStand();
}
// 转圈
void DogController::ExecuteSpin() {
for (int i = 0; i < 16; i++) {
ExecuteTurnLeft(1);
vTaskDelay(pdMS_TO_TICKS(50));
}
}
// ========== 辅助方法 ==========
void DogController::SetLegAngle(LegType leg, int angle, int speed_ms) {
if (leg < servos_.size() && servos_[leg] != nullptr) {
servos_[leg]->SetAngle(angle);
vTaskDelay(pdMS_TO_TICKS(speed_ms));
}
}
void DogController::SetAllLegs(int lf_angle, int rf_angle, int lb_angle, int rb_angle, int speed_ms) {
if (servos_[LEG_LEFT_FRONT] != nullptr) {
servos_[LEG_LEFT_FRONT]->SetAngle(lf_angle);
}
if (servos_[LEG_RIGHT_FRONT] != nullptr) {
servos_[LEG_RIGHT_FRONT]->SetAngle(rf_angle);
}
if (servos_[LEG_LEFT_BACK] != nullptr) {
servos_[LEG_LEFT_BACK]->SetAngle(lb_angle);
}
if (servos_[LEG_RIGHT_BACK] != nullptr) {
servos_[LEG_RIGHT_BACK]->SetAngle(rb_angle);
}
vTaskDelay(pdMS_TO_TICKS(speed_ms));
}
void DogController::StopAll() {
ESP_LOGI(TAG, "停止所有动作");
for (auto servo : servos_) {
if (servo != nullptr) {
servo->Stop();
}
}
is_moving_ = false;
}
bool DogController::IsMoving() const {
return is_moving_;
}
bool DogController::AllServosReady() const {
for (auto servo : servos_) {
if (servo != nullptr && servo->IsMoving()) {
return false;
}
}
return true;
}
void DogController::InitializeTools() {
auto& mcp_server = McpServer::GetInstance();
ESP_LOGI(TAG, "开始注册机器狗MCP工具...");
// 原有稳定动作
mcp_server.AddTool("self.dog.stand", "机器狗站立姿势", PropertyList(), [this](...) { Stand(); return "机器狗已站立"; });
mcp_server.AddTool("self.dog.sit", "机器狗坐下", PropertyList(), [this](...) { Sit(); return "机器狗已坐下"; });
mcp_server.AddTool("self.dog.lie_down", "机器狗趴下", PropertyList(), [this](...) { LieDown(); return "机器狗已趴下"; });
mcp_server.AddTool("self.dog.stretch", "机器狗伸懒腰", PropertyList(), [this](...) { Stretch(); return "机器狗在伸懒腰"; });
mcp_server.AddTool("self.dog.wave", "机器狗挥手打招呼", PropertyList(), [this](...) { Wave(); return "机器狗在挥手打招呼"; });
mcp_server.AddTool("self.dog.walk_forward", "机器狗前进",
PropertyList({Property("steps", kPropertyTypeInteger, 5, 1, 10)}),
[this](const PropertyList& properties) -> ReturnValue {
int steps = properties["steps"].value<int>();
WalkForward(steps);
return "机器狗前进 " + std::to_string(steps) + " 步";
});
mcp_server.AddTool("self.dog.walk_backward", "机器狗后退",
PropertyList({Property("steps", kPropertyTypeInteger, 5, 1, 10)}),
[this](const PropertyList& properties) -> ReturnValue {
int steps = properties["steps"].value<int>();
WalkBackward(steps);
return "机器狗后退 " + std::to_string(steps) + " 步";
});
mcp_server.AddTool("self.dog.shake_body", "机器狗摇摆身体", PropertyList(), [this](...) { ShakeBody(); return "机器狗在摇摆身体"; });
mcp_server.AddTool("self.dog.dance", "机器狗跳舞", PropertyList(), [this](...) { Dance(); return "机器狗在跳舞"; });
mcp_server.AddTool("self.dog.bow", "机器狗鞠躬", PropertyList(), [this](...) { Bow(); return "机器狗在鞠躬"; });
mcp_server.AddTool("self.dog.shake_head", "机器狗摇头", PropertyList(), [this](...) { ShakeHead(); return "机器狗在摇头"; });
// 新增动作
mcp_server.AddTool("self.dog.turn_left", "机器狗左转",
PropertyList({Property("steps", kPropertyTypeInteger, 10, 1, 10)}),
[this](const PropertyList& properties) -> ReturnValue {
int steps = properties["steps"].value<int>();
TurnLeft(steps);
return "机器狗左转 " + std::to_string(steps) + " 步";
});
mcp_server.AddTool("self.dog.turn_right", "机器狗右转",
PropertyList({Property("steps", kPropertyTypeInteger, 10, 1, 10)}),
[this](const PropertyList& properties) -> ReturnValue {
int steps = properties["steps"].value<int>();
TurnRight(steps);
return "机器狗右转 " + std::to_string(steps) + " 步";
});
mcp_server.AddTool("self.dog.excited_jump", "机器狗兴奋跳跃", PropertyList(), [this](...) { ExcitedJump(); return "机器狗兴奋跳跃"; });
mcp_server.AddTool("self.dog.tail_wag", "机器狗摇尾巴", PropertyList(), [this](...) { TailWag(); return "机器狗在摇尾巴"; });
mcp_server.AddTool("self.dog.scratch", "机器狗挠痒痒", PropertyList(), [this](...) { Scratch(); return "机器狗在挠痒痒"; });
mcp_server.AddTool("self.dog.spin", "机器狗转圈", PropertyList(), [this](...) { Spin(); return "机器狗在转圈"; });
// 停止和状态查询
mcp_server.AddTool("self.dog.stop", "停止机器狗所有动作", PropertyList(), [this](...) { StopAll(); return "机器狗已停止"; });
mcp_server.AddTool("self.dog.get_status", "获取机器狗当前状态", PropertyList(),
[this](const PropertyList& properties) -> ReturnValue {
std::string action_name;
switch (GetCurrentAction()) {
case ACTION_STAND: action_name = "站立"; break;
case ACTION_SIT: action_name = "坐下"; break;
case ACTION_LIE_DOWN: action_name = "趴下"; break;
case ACTION_STRETCH: action_name = "伸懒腰"; break;
case ACTION_WAVE: action_name = "挥手"; break;
case ACTION_WALK_FORWARD: action_name = "前进"; break;
case ACTION_WALK_BACKWARD: action_name = "后退"; break;
case ACTION_TURN_LEFT: action_name = "左转"; break;
case ACTION_TURN_RIGHT: action_name = "右转"; break;
case ACTION_SHAKE_BODY: action_name = "摇摆身体"; break;
case ACTION_DANCE: action_name = "跳舞"; break;
case ACTION_BOW: action_name = "鞠躬"; break;
case ACTION_SHAKE_HEAD: action_name = "摇头"; break;
case ACTION_JUMP: action_name = "跳跃"; break;
case ACTION_TAIL_WAG: action_name = "摇尾巴"; break;
case ACTION_SCRATCH: action_name = "挠痒痒"; break;
case ACTION_SPIN: action_name = "转圈"; break;
default: action_name = "未知";
}
return "当前状态: " + action_name + ", 是否运动中: " + (IsMoving() ? "是" : "否");
});
ESP_LOGI(TAG, "机器狗MCP工具注册完成");
}6. bread_compact_wifi_with_servo.cc - 主程序文件
机器狗控制器的初始化和集成
系统启动和任务管理
#include "wifi_board.h"
#include "codecs/no_audio_codec.h"
#include "display/oled_display.h"
#include "system_reset.h"
#include "application.h"
#include "button.h"
#include "config.h"
#include "mcp_server.h"
#include "servo_controller.h"
#include "led/single_led.h"
#include "assets/lang_config.h"
#include <wifi_station.h>
#include <esp_log.h>
#include <driver/i2c_master.h>
#include <esp_lcd_panel_ops.h>
#include <esp_lcd_panel_vendor.h>
#include "dog_controller.h"
#ifdef SH1106
#include <esp_lcd_panel_sh1106.h>
#endif
#define TAG "BreadCompactWifiWithServo"
LV_FONT_DECLARE(font_puhui_14_1);
LV_FONT_DECLARE(font_awesome_14_1);
class BreadCompactWifiWithServoBoard : public WifiBoard {
private:
i2c_master_bus_handle_t display_i2c_bus_;
esp_lcd_panel_io_handle_t panel_io_ = nullptr;
esp_lcd_panel_handle_t panel_ = nullptr;
Display *display_ = nullptr;
Button boot_button_;
Button touch_button_;
Button volume_up_button_;
Button volume_down_button_;
DogController *dog_controller_;
void InitializeDisplayI2c() {
i2c_master_bus_config_t bus_config = {
.i2c_port = (i2c_port_t)0,
.sda_io_num = DISPLAY_SDA_PIN,
.scl_io_num = DISPLAY_SCL_PIN,
.clk_source = I2C_CLK_SRC_DEFAULT,
.glitch_ignore_cnt = 7,
.intr_priority = 0,
.trans_queue_depth = 0,
.flags = {
.enable_internal_pullup = 1,
},
};
ESP_ERROR_CHECK(i2c_new_master_bus(&bus_config, &display_i2c_bus_));
}
void InitializeSsd1306Display() {
// SSD1306 config
esp_lcd_panel_io_i2c_config_t io_config = {
.dev_addr = 0x3C,
.on_color_trans_done = nullptr,
.user_ctx = nullptr,
.control_phase_bytes = 1,
.dc_bit_offset = 6,
.lcd_cmd_bits = 8,
.lcd_param_bits = 8,
.flags = {
.dc_low_on_data = 0,
.disable_control_phase = 0,
},
.scl_speed_hz = 400 * 1000,
};
ESP_ERROR_CHECK(esp_lcd_new_panel_io_i2c_v2(display_i2c_bus_, &io_config, &panel_io_));
ESP_LOGI(TAG, "Install SSD1306 driver");
esp_lcd_panel_dev_config_t panel_config = {};
panel_config.reset_gpio_num = -1;
panel_config.bits_per_pixel = 1;
esp_lcd_panel_ssd1306_config_t ssd1306_config = {
.height = static_cast<uint8_t>(DISPLAY_HEIGHT),
};
panel_config.vendor_config = &ssd1306_config;
#ifdef SH1106
ESP_ERROR_CHECK(esp_lcd_new_panel_sh1106(panel_io_, &panel_config, &panel_));
#else
ESP_ERROR_CHECK(esp_lcd_new_panel_ssd1306(panel_io_, &panel_config, &panel_));
#endif
ESP_LOGI(TAG, "SSD1306 driver installed");
// Reset the display
ESP_ERROR_CHECK(esp_lcd_panel_reset(panel_));
if (esp_lcd_panel_init(panel_) != ESP_OK) {
ESP_LOGE(TAG, "Failed to initialize display");
display_ = new NoDisplay();
return;
}
ESP_ERROR_CHECK(esp_lcd_panel_invert_color(panel_, false));
// Set the display to on
ESP_LOGI(TAG, "Turning display on");
ESP_ERROR_CHECK(esp_lcd_panel_disp_on_off(panel_, true));
display_ = new OledDisplay(panel_io_, panel_, DISPLAY_WIDTH, DISPLAY_HEIGHT, DISPLAY_MIRROR_X, DISPLAY_MIRROR_Y,
{&font_puhui_14_1, &font_awesome_14_1});
}
void InitializeButtons() {
boot_button_.OnClick([this]() {
auto& app = Application::GetInstance();
if (app.GetDeviceState() == kDeviceStateStarting && !WifiStation::GetInstance().IsConnected()) {
ResetWifiConfiguration();
}
app.ToggleChatState();
});
touch_button_.OnPressDown([this]() {
Application::GetInstance().StartListening();
});
touch_button_.OnPressUp([this]() {
Application::GetInstance().StopListening();
});
volume_up_button_.OnClick([this]() {
auto codec = GetAudioCodec();
auto volume = codec->output_volume() + 10;
if (volume > 100) {
volume = 100;
}
codec->SetOutputVolume(volume);
GetDisplay()->ShowNotification(Lang::Strings::VOLUME + std::to_string(volume));
});
volume_up_button_.OnLongPress([this]() {
GetAudioCodec()->SetOutputVolume(100);
GetDisplay()->ShowNotification(Lang::Strings::MAX_VOLUME);
});
volume_down_button_.OnClick([this]() {
auto codec = GetAudioCodec();
auto volume = codec->output_volume() - 10;
if (volume < 0) {
volume = 0;
}
codec->SetOutputVolume(volume);
GetDisplay()->ShowNotification(Lang::Strings::VOLUME + std::to_string(volume));
});
volume_down_button_.OnLongPress([this]() {
GetAudioCodec()->SetOutputVolume(0);
GetDisplay()->ShowNotification(Lang::Strings::MUTED);
});
}
void InitializeDogController() {
ESP_LOGI(TAG, "初始化机器狗控制器");
dog_controller_ = new DogController();
if (!dog_controller_->Initialize()) {
ESP_LOGE(TAG, "机器狗控制器初始化失败");
delete dog_controller_;
dog_controller_ = nullptr;
return;
}
ESP_LOGI(TAG, "机器狗控制器初始化完成");
}
// 物联网初始化,逐步迁移到 MCP 协议
void InitializeTools() {
if (dog_controller_ != nullptr) {
dog_controller_->InitializeTools();
}
}
public:
BreadCompactWifiWithServoBoard() :
boot_button_(BOOT_BUTTON_GPIO),
touch_button_(TOUCH_BUTTON_GPIO),
volume_up_button_(VOLUME_UP_BUTTON_GPIO),
volume_down_button_(VOLUME_DOWN_BUTTON_GPIO),
dog_controller_(nullptr) {
InitializeDisplayI2c();
InitializeSsd1306Display();
InitializeButtons();
InitializeDogController();
InitializeTools();
}
virtual ~BreadCompactWifiWithServoBoard() {
if (dog_controller_) {
delete dog_controller_;
}
}
virtual Led* GetLed() override {
static SingleLed led(BUILTIN_LED_GPIO);
return &led;
}
virtual AudioCodec* GetAudioCodec() override {
#ifdef AUDIO_I2S_METHOD_SIMPLEX
static NoAudioCodecSimplex audio_codec(AUDIO_INPUT_SAMPLE_RATE, AUDIO_OUTPUT_SAMPLE_RATE,
AUDIO_I2S_SPK_GPIO_BCLK, AUDIO_I2S_SPK_GPIO_LRCK, AUDIO_I2S_SPK_GPIO_DOUT, AUDIO_I2S_MIC_GPIO_SCK, AUDIO_I2S_MIC_GPIO_WS, AUDIO_I2S_MIC_GPIO_DIN);
#else
static NoAudioCodecDuplex audio_codec(AUDIO_INPUT_SAMPLE_RATE, AUDIO_OUTPUT_SAMPLE_RATE,
AUDIO_I2S_GPIO_BCLK, AUDIO_I2S_GPIO_WS, AUDIO_I2S_GPIO_DOUT, AUDIO_I2S_GPIO_DIN);
#endif
return &audio_codec;
}
virtual Display* GetDisplay() override {
return display_;
}
};
DECLARE_BOARD(BreadCompactWifiWithServoBoard);
以上代码文件附在后面:
相关帖子,可以配合阅读:
ESP IDF+ESP32S3小智AI+4舵机=手搓一个桌面智能小狗狗(1)- Makelog(造物记)
ESP IDF+ESP32S3小智AI+4舵机=手搓桌面智能小狗狗代码优化(2)- Makelog(造物记)
让我的小智AI桌面宠物能唱多多的歌- Makelog(造物记)
虽然还不是个完成度很高的项目,可以给大家提供一些参考的。
附 闪电蘑菇 老师fork的小智1.8.1源码:


 他的勋章
他的勋章

格式化2025.11.03
那你给个源码给我,我自己改成我对应的引脚,给个链接
rzyzzxw2025.11.03
源码在教程帖子中啊
格式化2025.11.02
我用的是闪猫otto AI机器人的板子能直接用这个固件吗?有交流群没,或者给个编译好的固件
rzyzzxw2025.11.02
没有交流群,源码可以自定义硬件引脚、显示屏大小引脚、舵机引脚、麦克风、数字功放引脚等,自己改源码要搞清楚配置的。有的还有表情,所以固件最好问卖家。
格式化2025.11.01
能不能分享下固件,编译环境弄了几天还是报错
rzyzzxw2025.11.01
可以的,舵机接线说一下。左前、左后、右前、右后
格式化2025.11.02
我用的是闪猫otto AI机器人的板子能直接用这个固件吗?
rzyzzxw2025.11.02
大概率不能用的
小潘请求支援2025.10.28
请问有组装小狗的视频吗,材料都齐了,但是不太会组装
rzyzzxw2025.10.28
没有视频,全靠手搓。
格式化2025.11.02
我用的是闪猫otto AI机器人的板子能直接用这个固件吗?
小潘请求支援2025.10.24
能问一下这个小喇叭买什么样的吗
rzyzzxw2025.10.24
x宝中小智AIEsp32 S3套件中小喇叭,中号那种,体积适中,音量大。
rzyzzxw2025.10.24
等我在帖子中补充一下。
rzyzzxw2025.10.26
你手上有面包板小智,加上4个舵机,就可以改成机器小狗了。
匿名
该评论已删除
小潘请求支援2025.10.28
我按照那个材料清单把东西买齐了,就可以开始造了吗
匿名
该评论已删除
rzyzzxw2025.10.28
考验动手动脑能力的时间到了,亲。