 返回首页
返回首页
 回到顶部
回到顶部
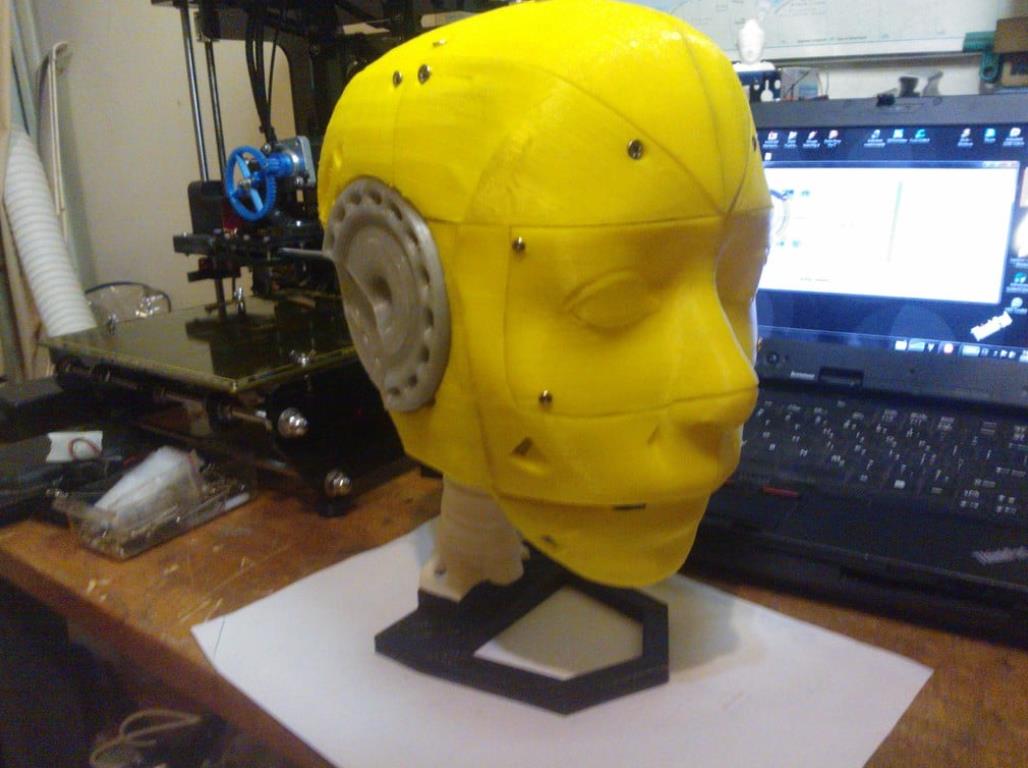
你们中的许多人一定知道 Sophia、iCub 和 Atlas 是谁。您也一定梦想过为自己制作类似的东西。嗯,你猜怎么着!愿望成真!;)
今天,我们将向您展示如何制作一个可以转动头部、环顾四周和四处移动的人形机器人。所需要的只是 evive 入门套件中的一些 3D 打印部件、电机、伺服系统和其他此类组件、控制机器人的智能手机以及大量的 DIYing!我们使用 Dabble(一款多功能的项目制作智能手机应用程序)来控制机器人,并使用 PictoBlox(强大的可视化编程软件)来编写代码。
您可以在 Google Play 上获取 Dabble 并从 这里.那么,准备好制作一些令人兴奋的机器人了吗?
让我们开始吧!
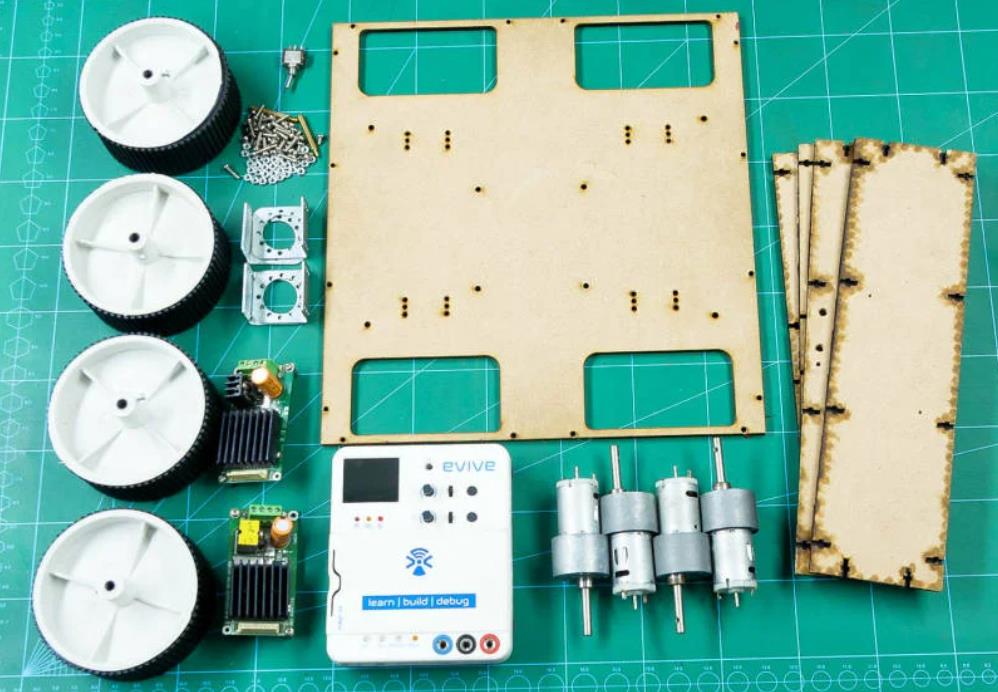
硬件
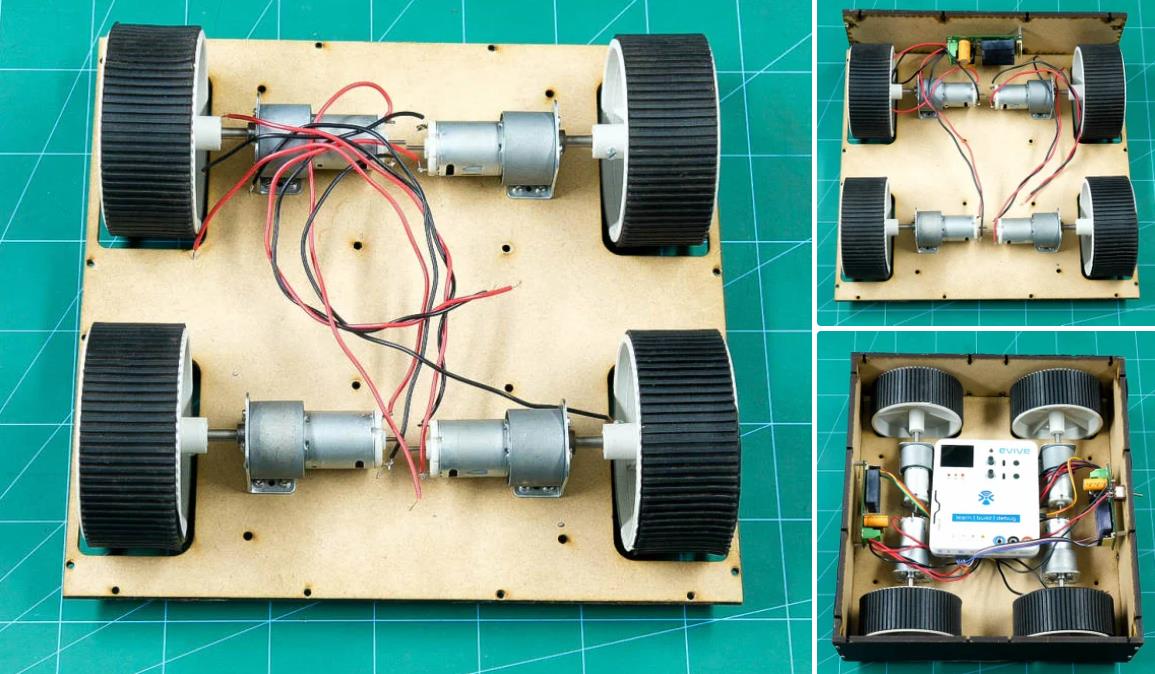
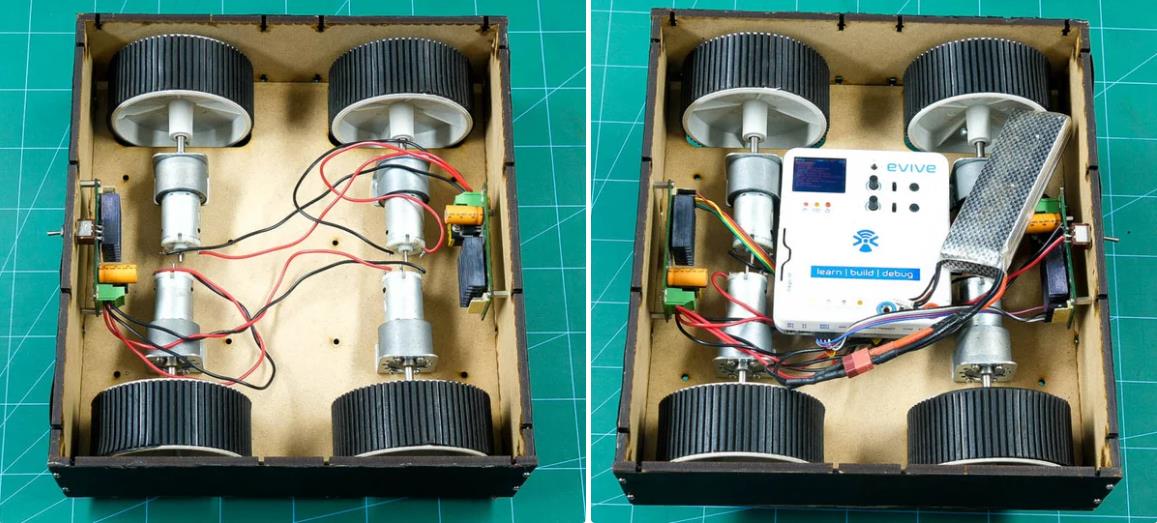
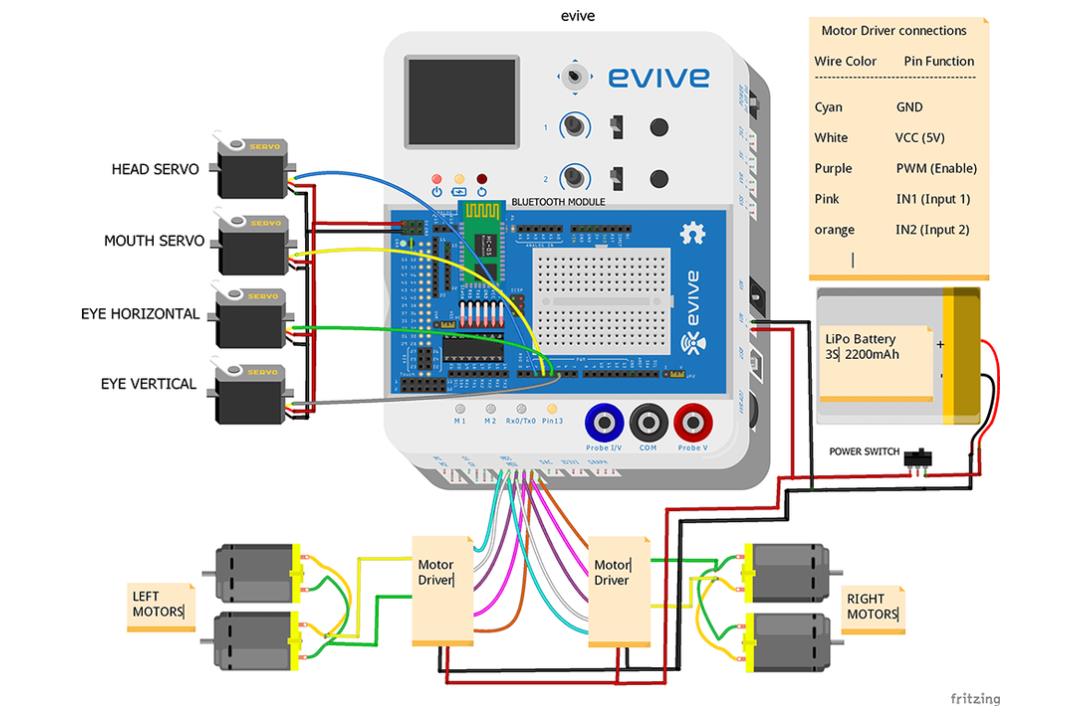
EVIVE
金属伺服及配件
微型舵机及配件
Hercules 电机驱动器
HC05 蓝牙模块
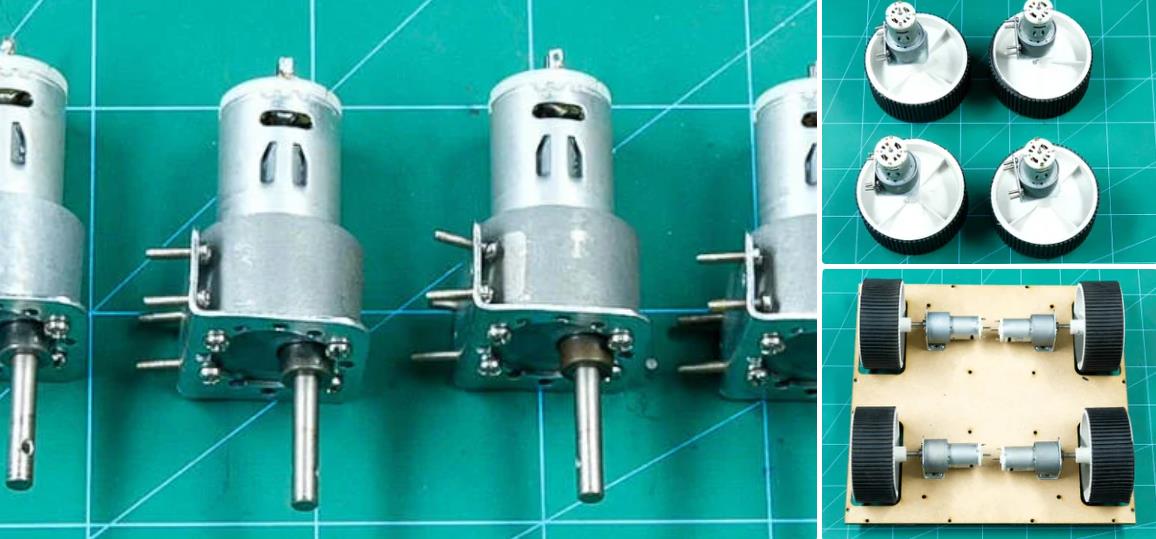
高扭矩电机
履带轮
滑动开关
锂聚合物电池
3 毫米长的 M8 螺栓
3 毫米长的 M20 螺栓
M3 螺母
M4 锁紧螺母
跳线
软件
用于控制它的 Dabble
PictoBlox 用于编码
我们只列出了电子和机械组件,但您需要进行激光切割和 3D 打印一些零件,其设计文件可分别在此处和此处获得。
注意 - 链接上提供的 STL 文件由 InMoov 设计。
人形机器人的工作
通过 HC-05 蓝牙模块将 Humanoid Robot 连接到 Dabble。您可以使用 Dabble 控制几乎所有的板子,如 Arduino Mega、Nano、Uno、ESP32 和 evive。打开 Dabble 并单击 Connect-Disconnect 按钮。从列表中选择设备的名称。
我们同时使用两个模块:
加速度计 (手机传感器)
输入模块
加速度计
加速度计用于控制负责机器人运动的直流电机。
打开 Phone Sensors(手机传感器),点击 Accelerometer 旁边的切换按钮。这将开始向 evive 发送数据。当我们向前或向后倾斜手机时,沿 X 轴的加速度会发生变化。
如果沿 X 轴的加速度超过 6 m/s2,则机器人将向前移动。
如果温度低于 -5 m/s2,则机器人向后移动。
如果我们向左或向右倾斜手机,加速度会随着 Y 轴的变化而变化。
如果沿 Y 轴的加速度超过 6 m/s2,则机器人向左移动。
如果速度低于 -5 m/s2,则机器人将向正确的方向移动。
如果沿 X 轴和 Y 轴的加速度在 -6 m/s2 和 6 m/s2 之间,则机器人不会移动。
输入模块
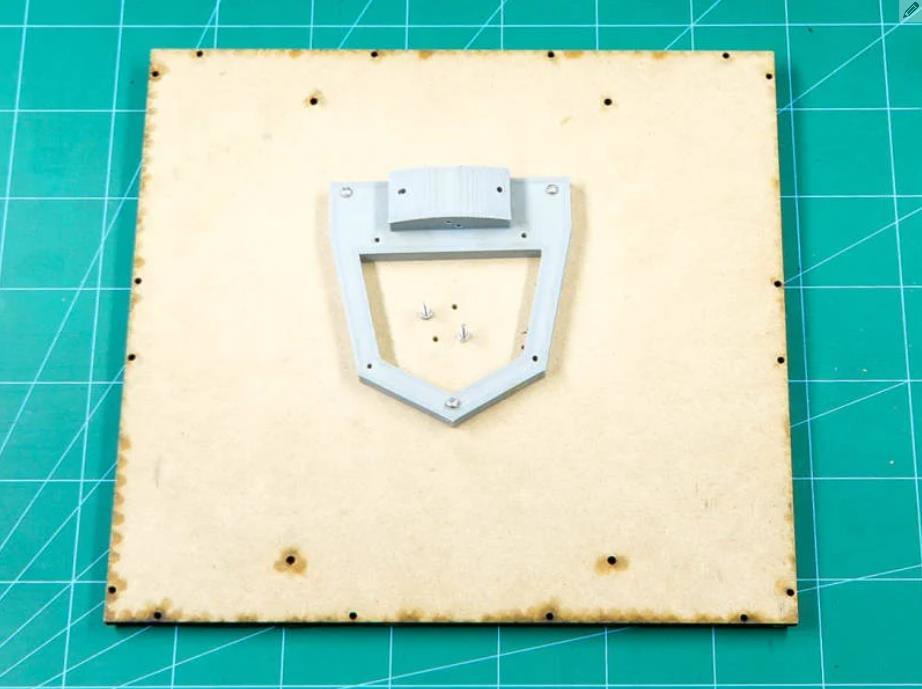
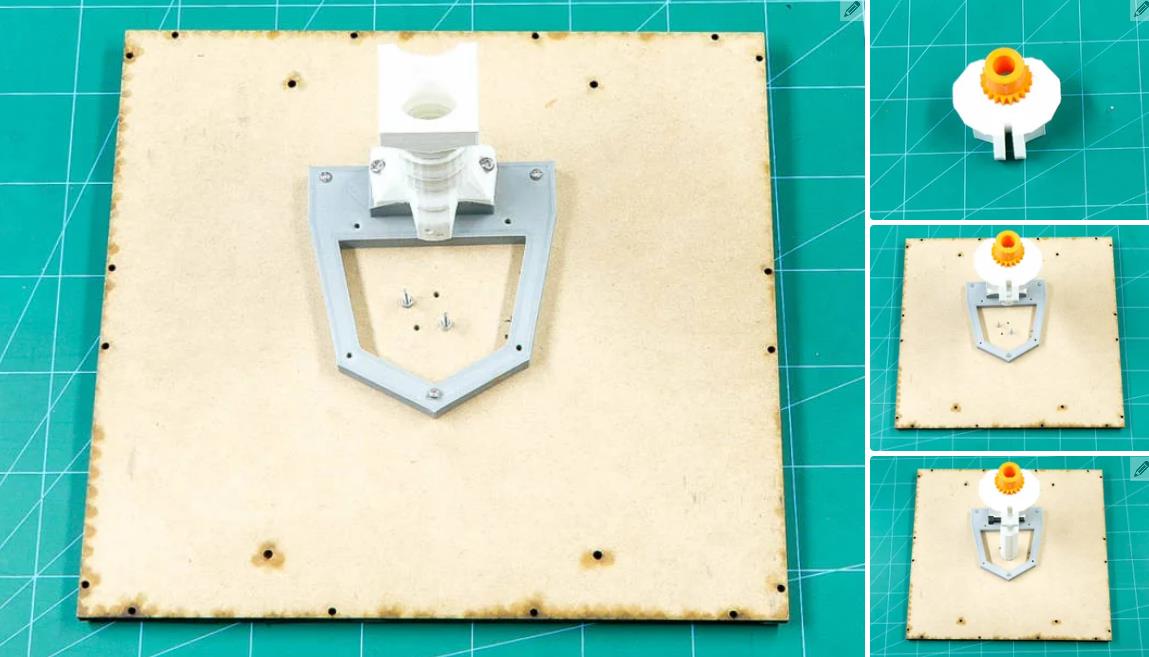
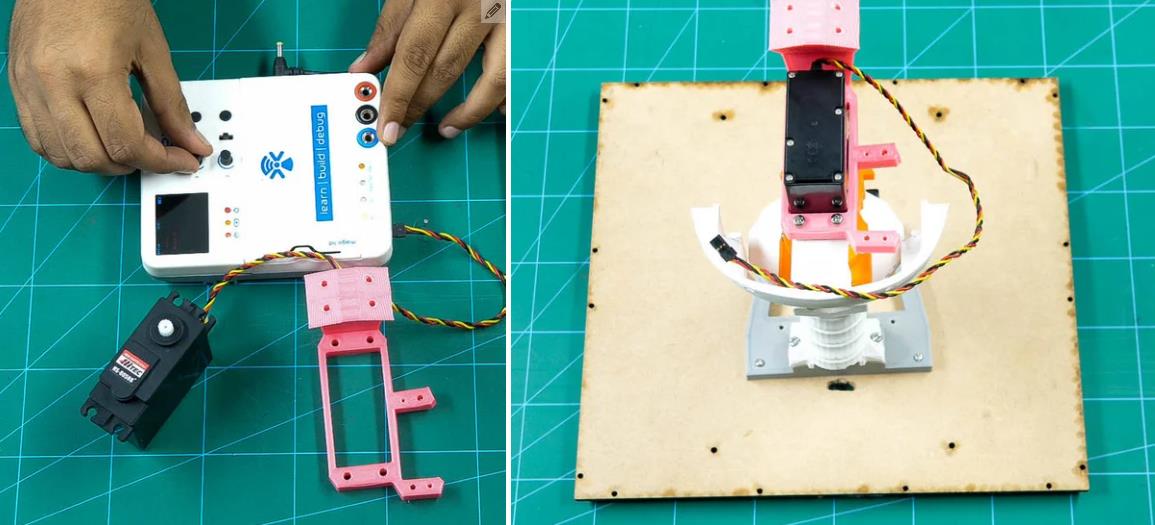
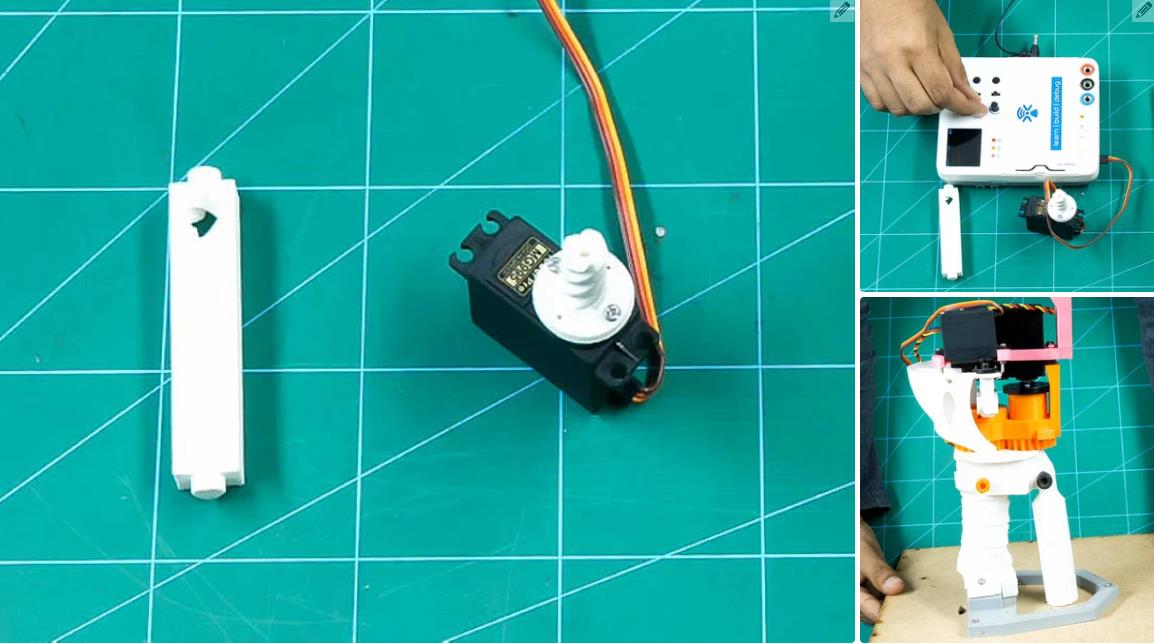
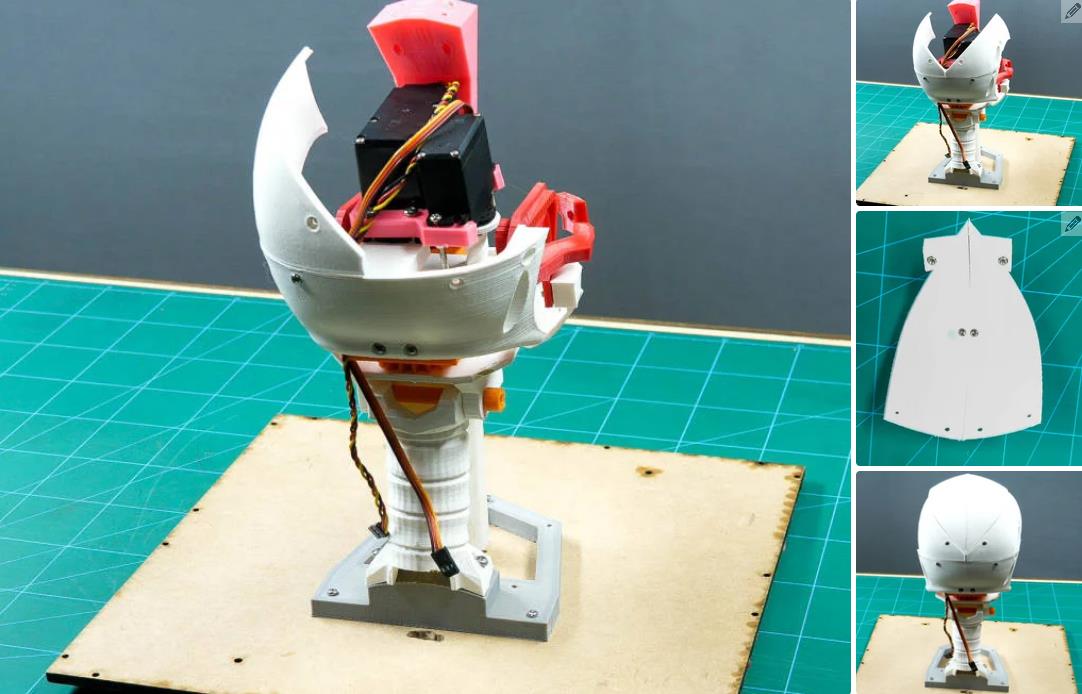
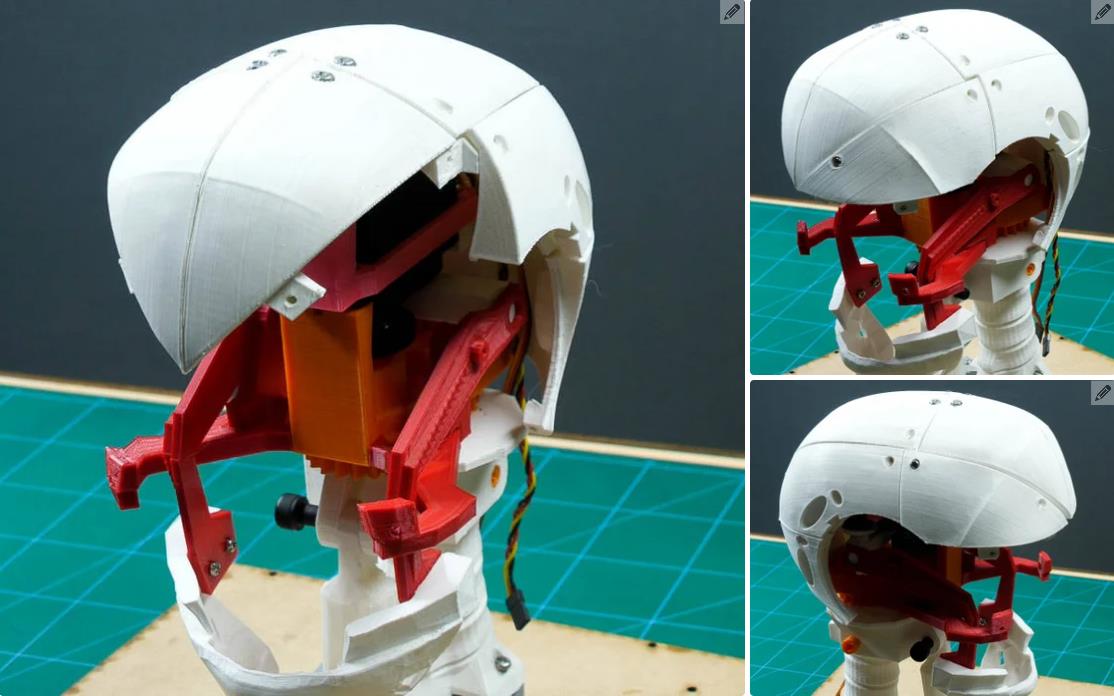
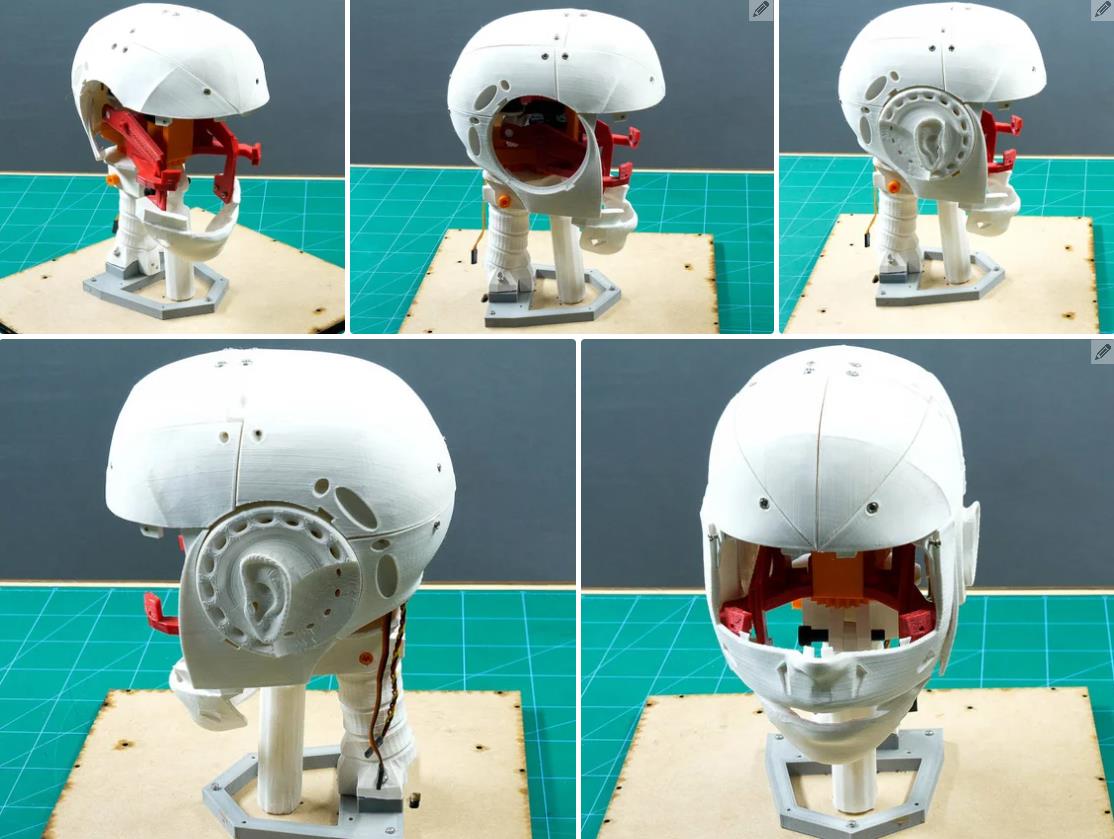
HS-805BB 伺服器用于控制头部的运动,即从右到左,反之亦然。我们可以从 Input Module 的 Potentiometer 1 控制它。
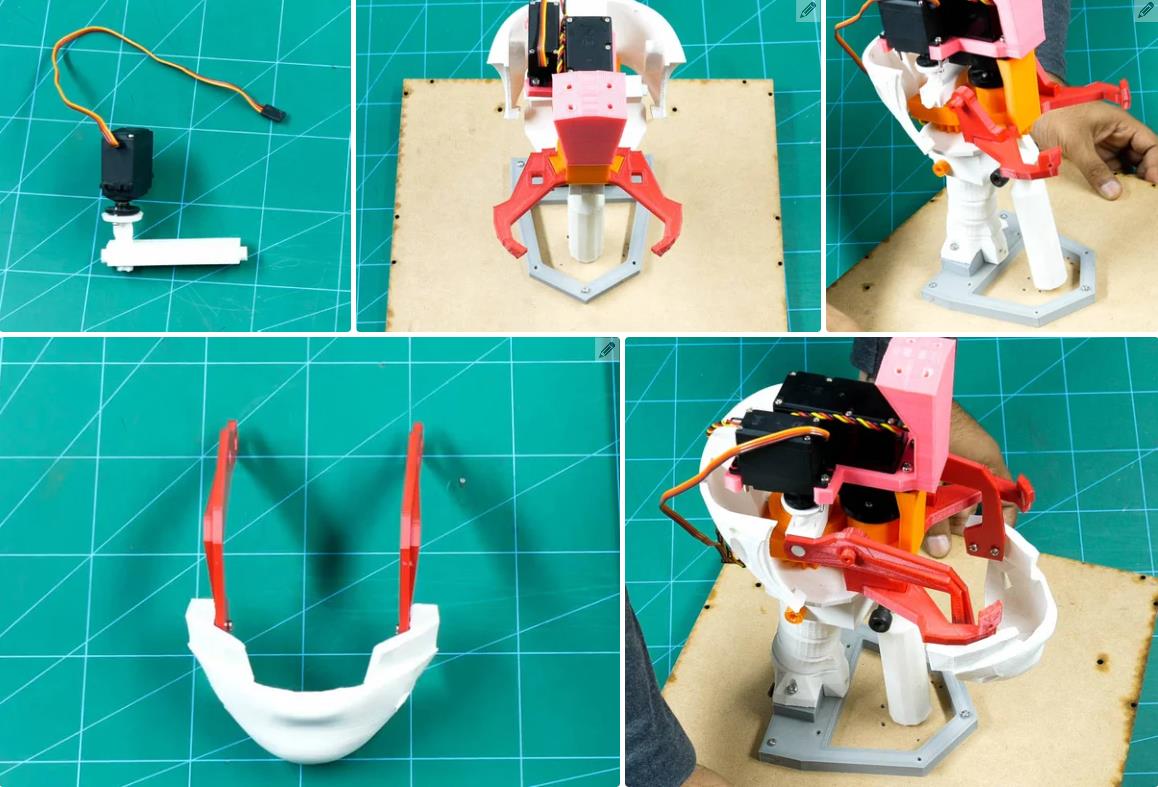
金属舵机用于控制 Jaw 的运动。我们可以使用 Input Module 的 Tactile 开关打开和关闭钳口。
轻触开关 1 用于较长时间地打开钳口。
触摸开关 2 用于在较短的时间内打开钳口。
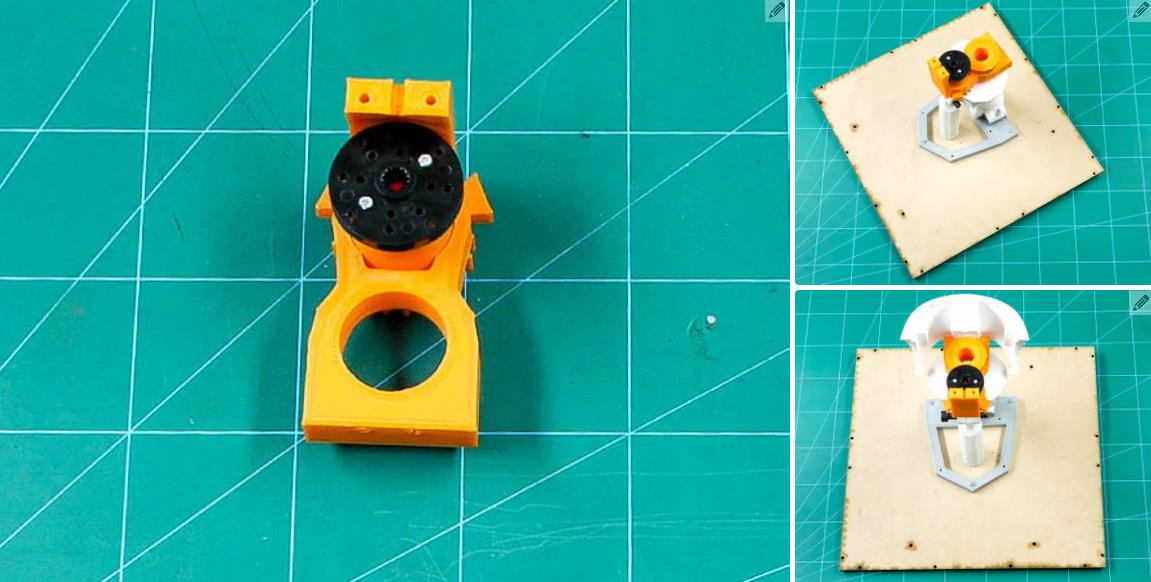
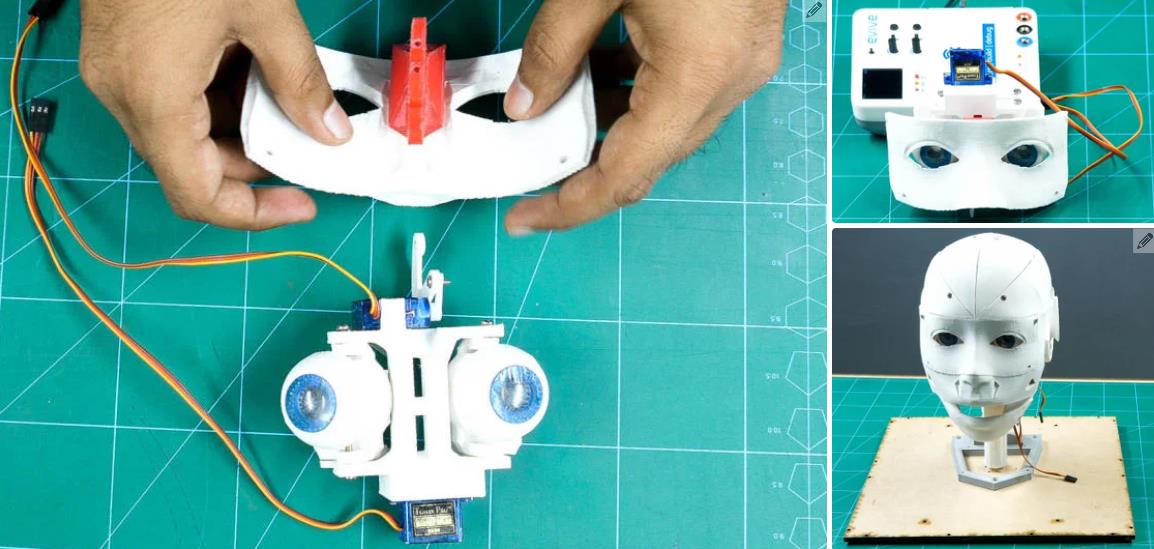
两个微型伺服器安装在眼机构中。它们可以使用 Input Module 的滑动开关进行控制。
滑动开关 1 用于眼睛的水平移动,即向左和向右移动。
滑动开关 2 用于眼睛的垂直运动,即上下移动。

【Arduino 动手做】3D 打印人形机器人全栈开发:基于 Evive-Arduino 平台的智能手机物联网控制系统构建
项目链接:https://www.instructables.com/Smartphone-Controlled-3D-Printed-Humanoid-Robot-Us/
项目作者:印度 艾哈迈达巴德(STEM百科)
项目视频:https://www.youtube.com/watch?v=zzC7LDP64sY
3D打印文件:https://www.thingiverse.com/thing:150209
项目开源代码:https://content.instructables.com/FEY/4RGR/JVMNPR9Q/FEY4RGRJVMNPR9Q.sb3
PictoBlox:https://ai.thestempedia.com/docs/pictoblox/pictoblox-tutorials/getting-started-with-pictoblox/
设计文件:extension://ngbkcglbmlglgldjfcnhaijeecaccgfi/https://thestempedia.com/wp-content/uploads/2023/06/6mm_MDF_1200mmx900mm.pdf




 他的勋章
他的勋章

评论