 返回首页
返回首页
 回到顶部
回到顶部

一、项目介绍:
夏至是二十四节气中的第十个节气,
也是夏季的第四个节气,
通常在每年公历6月21日或22日交节。
夏至这天,太阳直射地面的位置到达一年的最北端,
此时,北半球各地的白昼时间达到全年最长。
也是一年中正午太阳高度最高的一天。
今天分享一个《M10小车——扩展板组合的循“轨”蹈矩项目》。
未来我们M10小车载着满满货物,稳稳行驶在田间小路上,
见证着夏至时节万物蓬勃生长的盎然生机。
M10小车1.0
二、材料清单
三、思路:
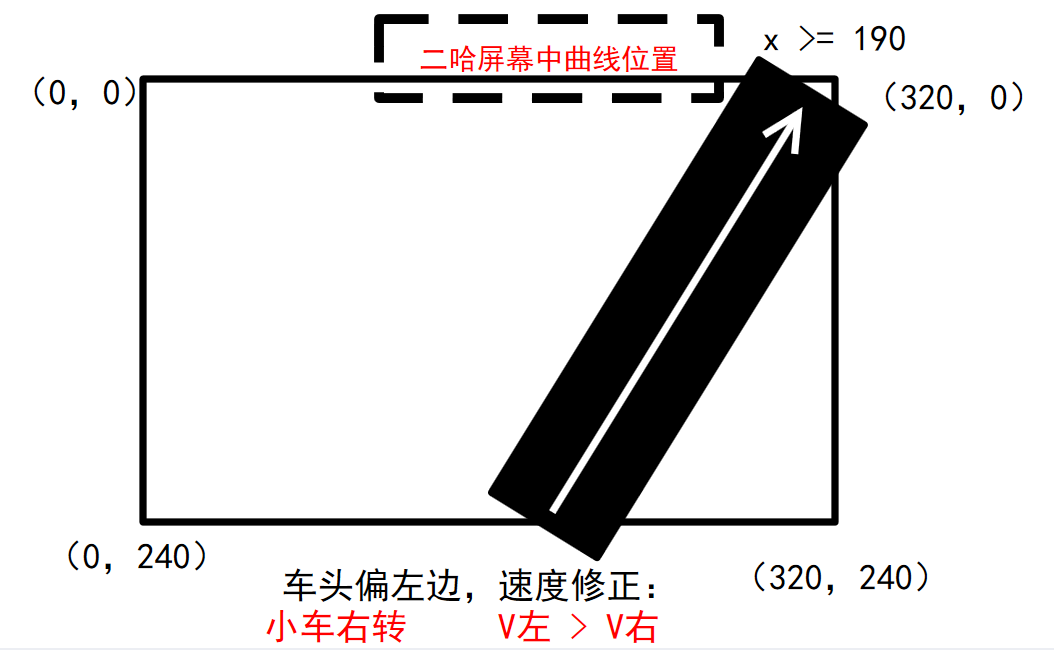
1.当M10小车运动到地图黑线的偏左位置时,二哈控制小车向右转弯;板载RGB车灯右边黄灯点亮;
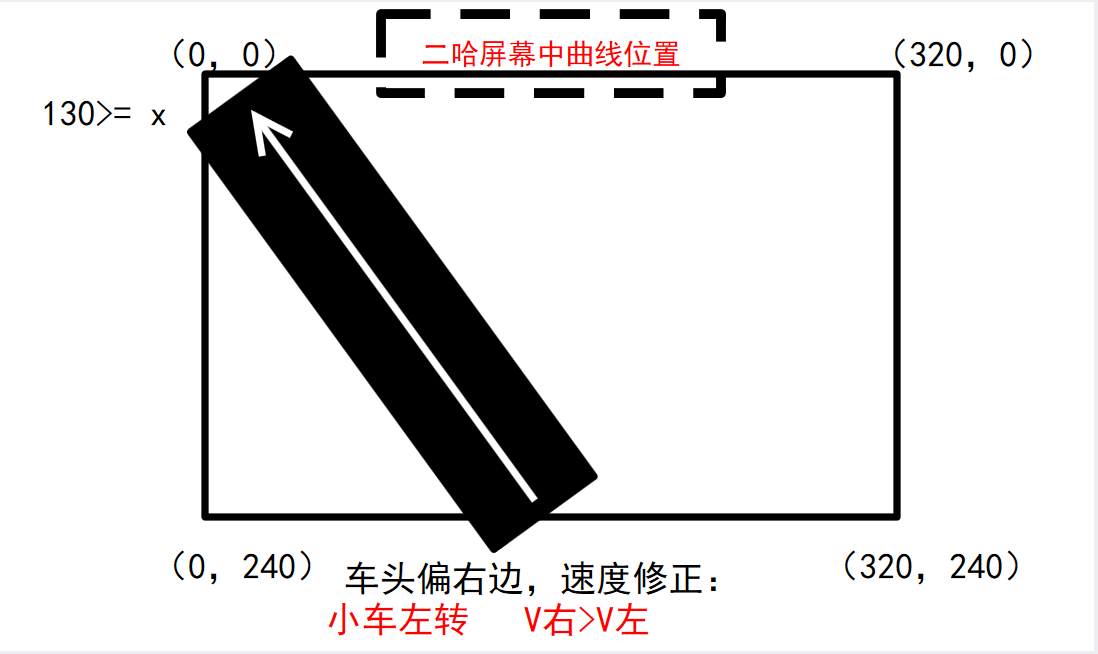
2.当M10小车运动到地图黑线的偏右位置时,二哈控制小车向左转弯;板载RGB车灯左边黄灯点亮;
3.当M10小车运动到地图黑线相对居中时,二哈控制小车直行;板载RGB车灯两边红灯点亮。
M10小车2.0
说明:调整HuskyLens在小车的位置,小车巡线效果有明显提升。
四、HuskyLens巡线识别
追踪指定颜色线条,做路径预测
(一)HuskyLens巡线——操作设置
1、通过“功能按键”向左或者向右拨动,选择屏幕中“巡线”选项。
2、长按“功能按键”,进入巡线功能的二级菜单参数设置界面。向左拨动“功能按键”关闭“学习多个”的开关,即: 进度条颜色变白,进度条上的方块位于进度条的左边。再短按“功能按键”,确认该参数。
3、 向左拨动“功能按键”,选中“保存并返回“,短按”功能按键“,屏幕提示”是否保 存参数?“,默认选择”确认“,此时短按”功能按键“,即可保存参数,并自动返回到 巡线模式。

(二)HuskyLens巡线——学习线条
将 HuskyLens 屏幕上的“+”字对准目标线条,将橙黄色的方框对准背景色。建议HuskyLens 的视野范围内只有需要学习的线条,并且没有交叉线。尽量将 HuskyLens 与目标线条保持平行,然后 HuskyLens 会自动检测线条,并出现白色的箭头。然后短 按“学习按键”即可,白色箭头变成了蓝色箭头。
(三)HuskyLens巡线——巡线追踪:
当 HuskyLens 检测到学习过的线条时(即:同一种颜色的线条),HuskyLens 的屏幕 上会显示蓝色的箭头,箭头的指向表示路径预测的方向。
小提示:
1、学习线条时,尽量把 HuskyLens 的位置调节到与线条平行。
2、线条的颜色与环境光线有很大关系,建议巡线的时候,保持环境光线的稳定。
(四)HuskyLens巡线————小车巡线的逻辑
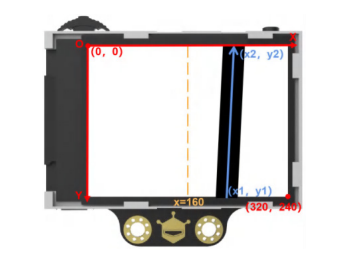
我们将 HuskyLens 在巡线过程中屏幕上显示的信息剥离出来,抽象成上图的几何数学模型。 HuskyLens屏幕的分辨率是 320×240,屏幕左上角的O点为屏幕的坐标原点(0, 0), 水平向右方向为 X 轴正方向,竖直向下方向为 Y 轴正方向,因此屏幕右下角的坐标为(320, 240)。
上图中虚线为屏幕的中轴线,这条线的横坐标值为160。蓝色箭头为 HuskyLens 计算出来的线条方向,蓝色箭头的起点坐标为(x1, y1),终点坐标为(x2, y2)。
所以,我们只需要判断蓝色箭头的起点x1相对中轴线的位置就能实现巡线了。
五、搭建环境
1、硬件:行空板M10扩展板、哈士奇 、M10小车,电机;
2、软件:Mind+ V1.8.1;

六、电路接线和功能说明:
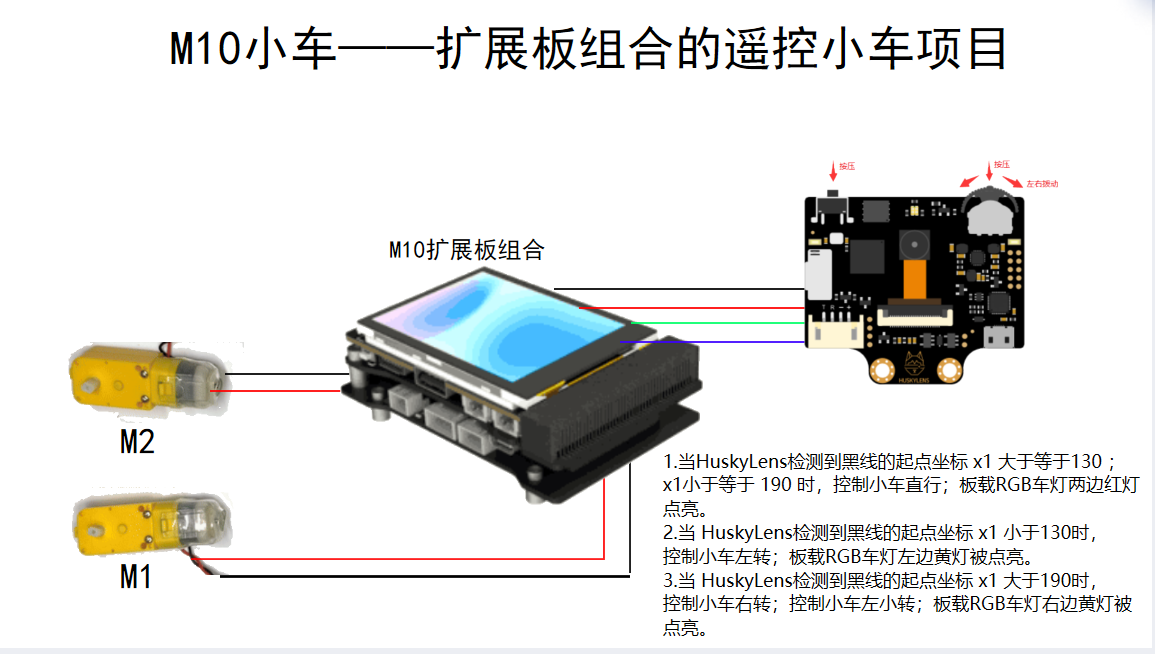
电路接线:
哈士奇摄像头工作在IIC模式,地址:0x32,插到行空板M10扩展板IIC接口上,
红线接VCC ;黑线接GND;蓝线接SCL;绿线接SDA
七、编程环境部署
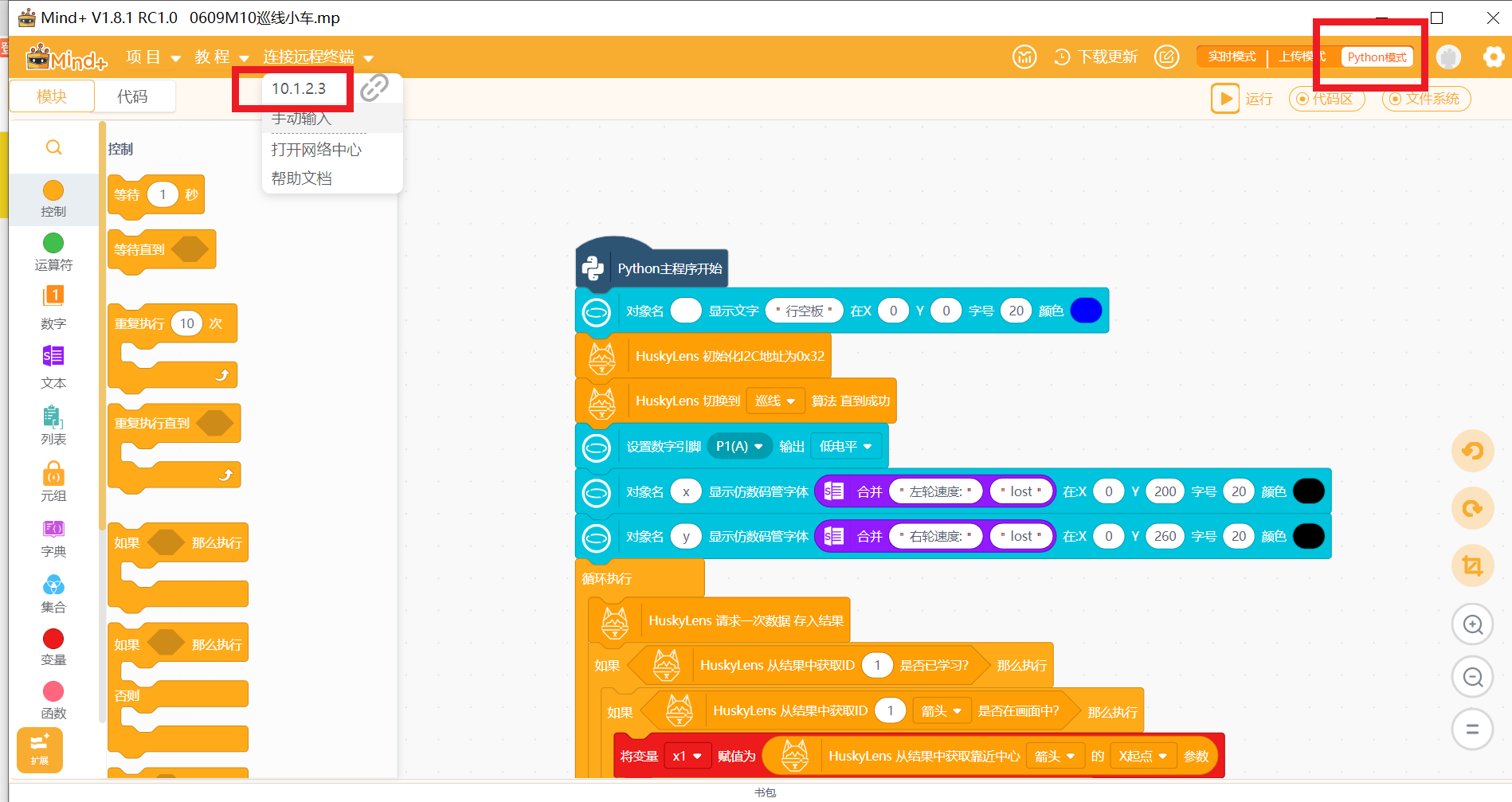
步骤1 连接设备
打开 Mind+,通过数据线连接M10和计算机,用管理员模式打开Mind V1.8.1,将Mind+切换为“python模式”下,连接远程控制:10.1.2.3;
步骤2 “扩展”中加载“行空板”、RGB灯带、“AI摄像头”
1.“扩展”中加载“行空板”、

2.“扩展”中加载“AI摄像头”、RGB灯带、

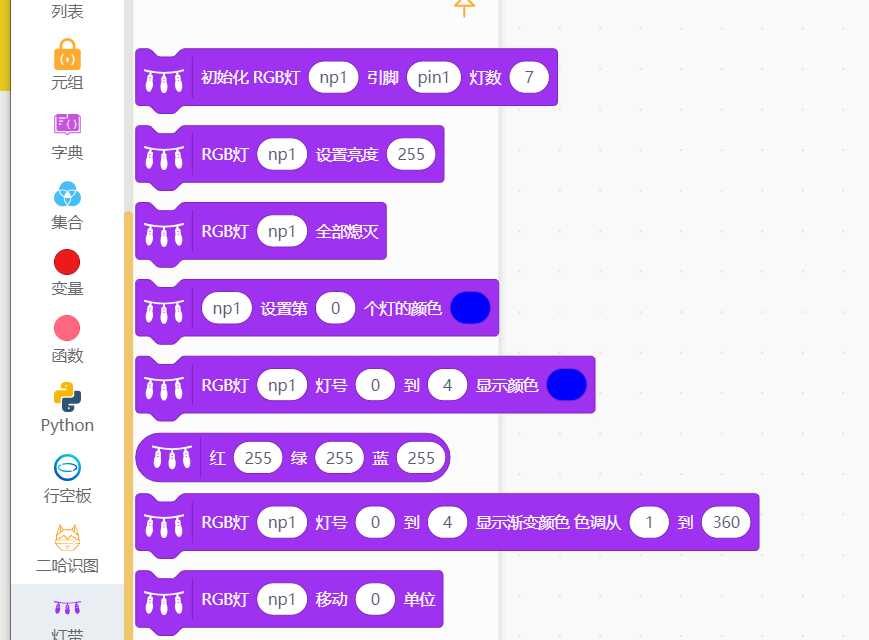
步骤3 左侧脚本区,添加灯带图形脚本
步骤4 左侧脚本区,添加二哈识别图形脚本

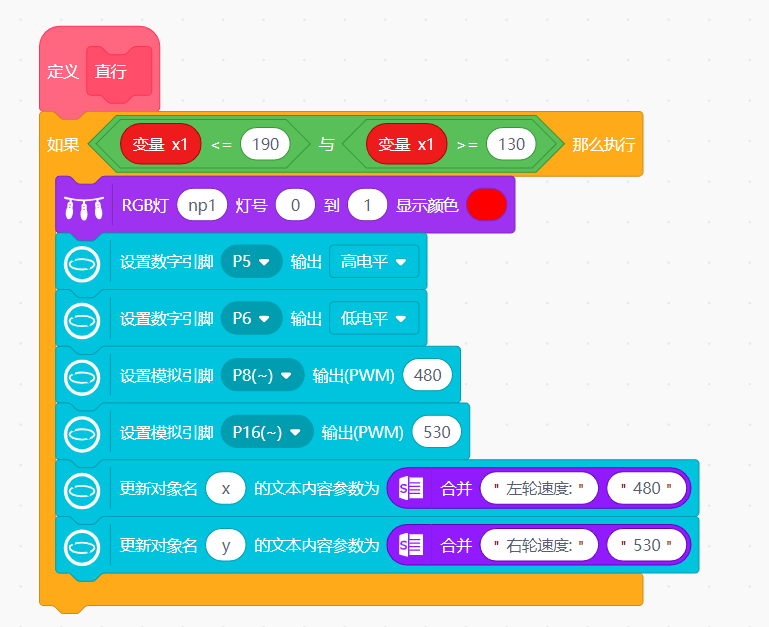
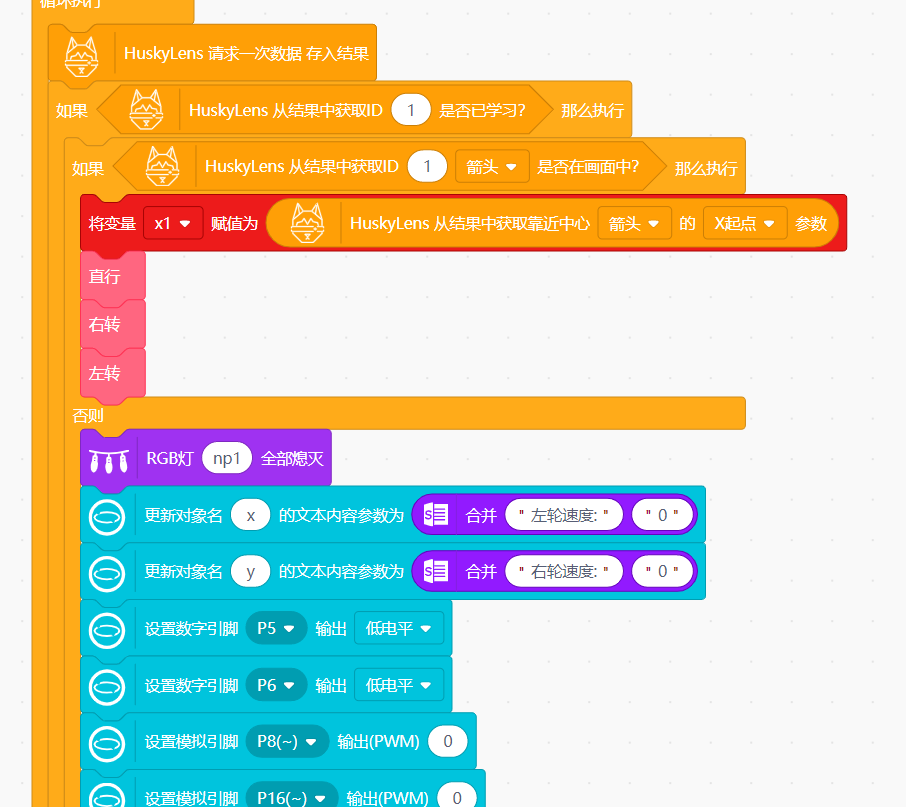
步骤5 编写程序——小车转向子程序
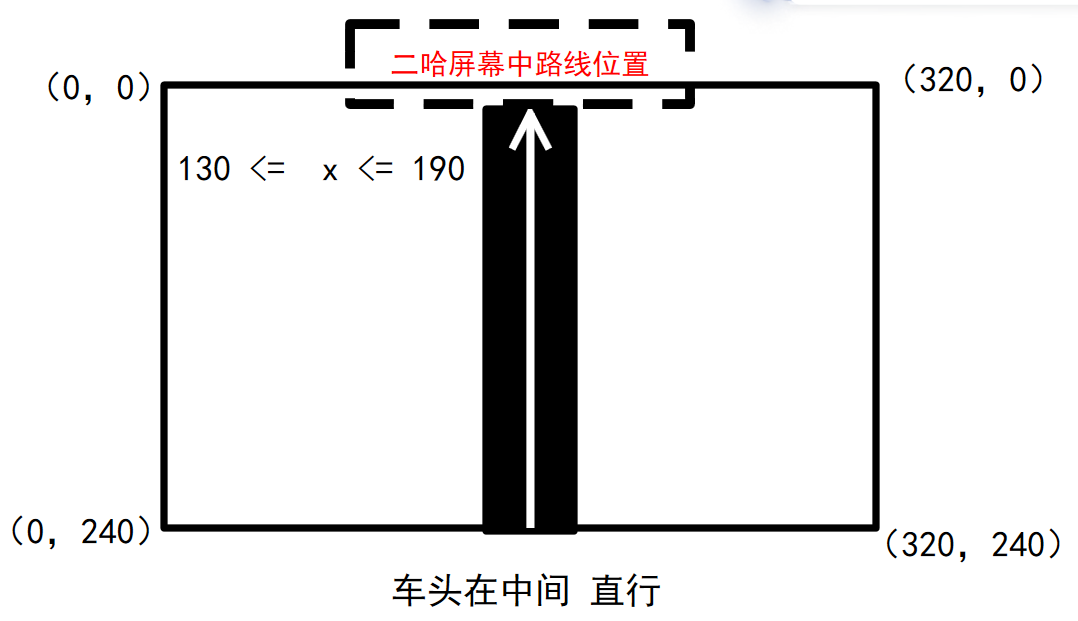
1.当HuskyLens检测到黑线的起点坐标 x1 大于等于130 ; x1小于等于 190 时,控制小车直行;板载RGB车灯两边红灯点亮。
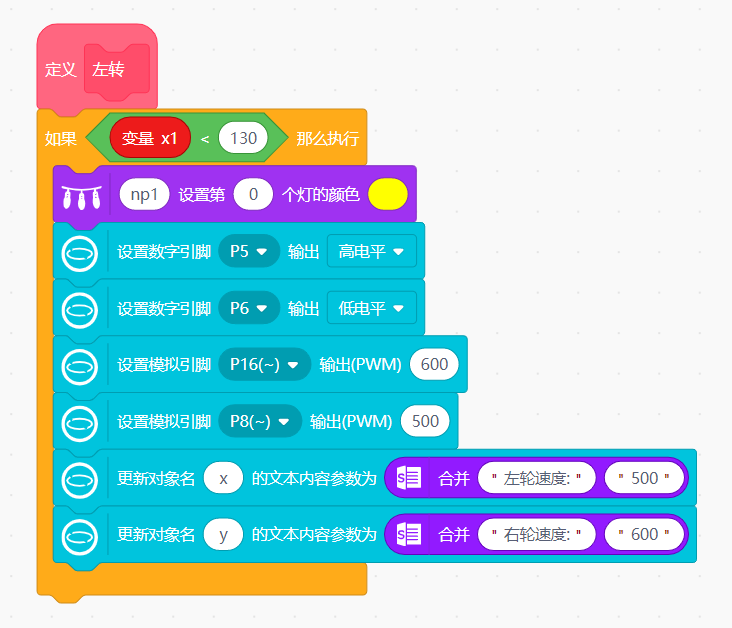
2.当 HuskyLens检测到黑线的起点坐标 x1 小于130时,控制小车左转;板载RGB车灯左边黄灯被点亮。
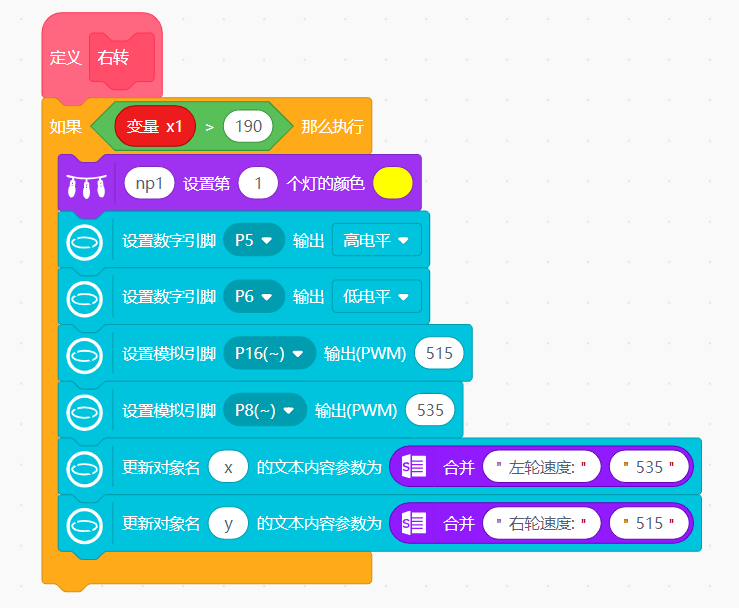
3.当 HuskyLens检测到黑线的起点坐标 x1 大于190时,控制小车右转;控制小车左小转;板载RGB车灯右边黄灯被点亮。
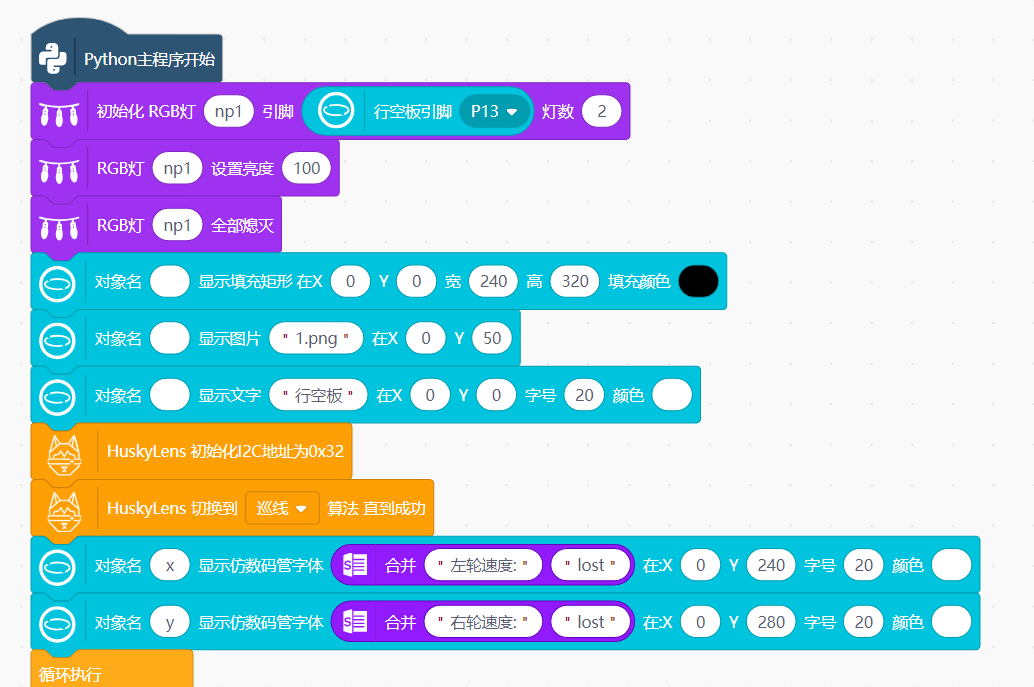
步骤6 编写程序——小车主程序

远程桌面登录行空板
八、知识拓展
什么是巡线?
巡线:通过传感器探测地面色调迥异的两种色彩从而获得引导位置,修正小车运动路径的一种技术。巡线小车是以移动小车位载体,以可见光摄像头作为载荷系统,以机器视觉-电磁场-GPS-GIS的多场信息融合作为小车自主移动与自主巡检的导航系统,以嵌入式计算机作为控制系统的软硬件开发平台。
二哈识图的巡线功能是卡内基梅隆大学开发的开源项目pixy实现的。
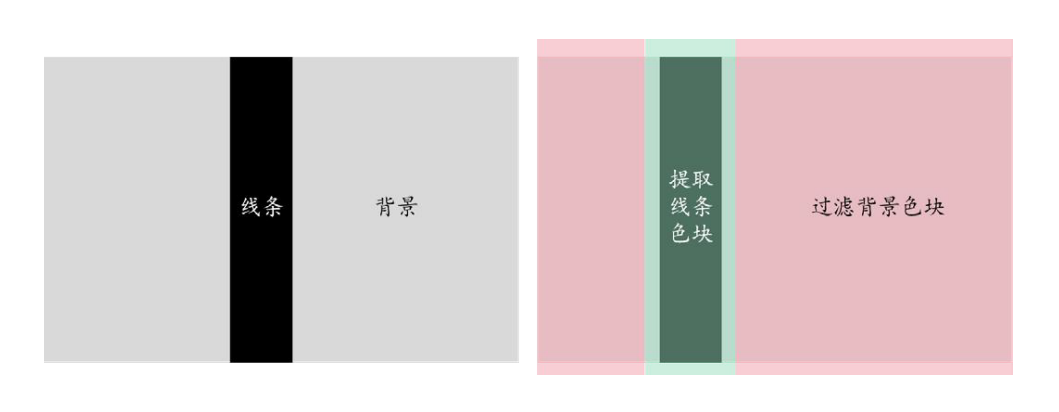
二哈识图的巡线算法可以对图片进行颜色识别,
基本思想:利用颜色空间来除去所有用户不感兴趣的背景,提取出线条色块。
二哈识图在学习颜色线条后,就会识别出拍摄视野范围颜色线条


 他的勋章
他的勋章
zhangzb617592025.12.11
可以发源程序吗?
zhangzb617592025.12.11
666高手高手,学习了
罗罗罗2025.11.24
666