 返回首页
返回首页
 回到顶部
回到顶部
项目背景:生活中常见的太阳能路灯等应用中,电池板多固定不动,太阳能利用效率受限。能否制作一款智能装置,自动追踪太阳在天空中的位置,确保光线直射,从而提升太阳能的收集效率。

项目简介:本项目的目标是开发一款智能化太阳能采集装置,它能根据所在地的经纬度和具体的时间、日期,自动调整太阳能电池板的朝向,追踪太阳在天空中的实时位置,确保太阳光直射电池板,实现太阳能的高效采集。在光照不足、恶劣天气如雨雪,或需要人工干预时,该装置可通过语音命令或微信小程序远程控制,自动折叠与回收太阳能电池板,有效避免电池板受损。项目融合了数学、物理、地理和信息科技等学科知识,提升了太阳能利用效率,增强了设备的环境适应能力,为智能太阳能技术的研究和应用开辟了新途径,为可持续能源的未来发展贡献了创新思路。

步骤1 提出问题
生活中常见的太阳能应用如太阳能路灯等,电池板多固定不动,太阳能的利用效率大大受限。能否制作一款智能装置,能够根据当地的经纬度和时间、日期等信息,自动追踪太阳在天空中的位置,确保光线直射,从而提升太阳能的收集效率?
步骤2 可行性探究(计算太阳位置)
经过搜索网上的资料,想要精确定位太阳在天空中的位置,需计算出太阳高度角和太阳方位角。这两个角度的计算需要用到数学三角函数以及地理学经纬度、时区等知识,较为复杂,且搜索到的不同网站给出的结果不尽相同,因此决定借助DeepSeek人工智能查找正确答案,并进行整理和实验验证。
1.获取当前经纬度和日期以及时间。
经度东正西负,纬度北正南负。
2.计算当前日期是一年中的第几天(n)。
例如1月1日为n=1,12月31日平年为n=365。
3.将本地时间转换为地方真太阳时(ST)。
经度差时间修正:ΔT =(当地经度 − 时区中心经度)➗ 15(小时)
地方真太阳时:ST = 本地时间 + ΔT(小时)
时间采用24时计时法。
4.计算时角(ω)
ω = 15° × (ST − 12)
5.计算太阳赤纬角(δ)
δ = 23.45° × sin{ [ 360° × (284 + n) ] ➗ 365 }
太阳赤纬即太阳直射所在纬度。
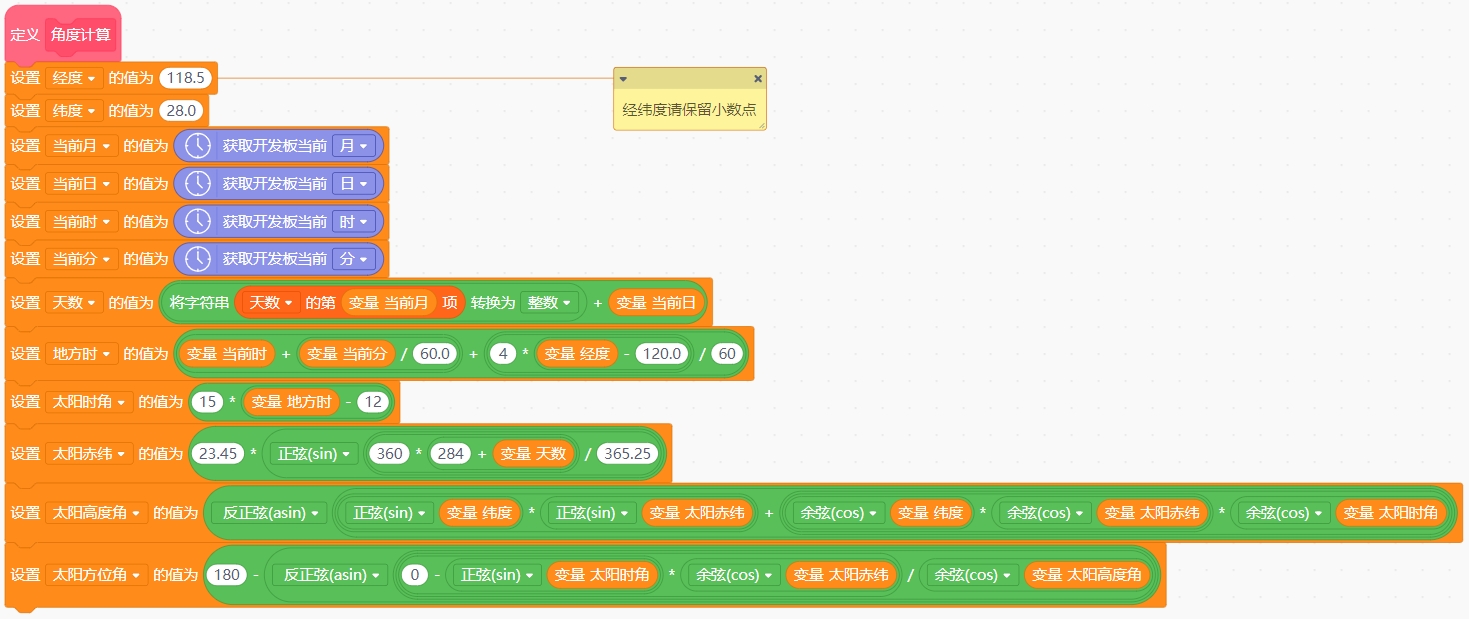
6.计算太阳高度角(α)
sin α = sin φ × sin δ + cos φ × cos δ × cos ω
α = arcsin(sin α)(转换为度数)
其中,φ为当地纬度。
7.计算太阳方位角(γ)
sin γ = [ (0 − sin ω) × cos δ ] ➗ cos α
γ = 180° − arcsin(sin γ )(转换为度数)
这里,方位角γ定义为从正北方向顺时针测量(0°为正北,90°为正东,180°为正南,270°为正西)。
注意事项
所有角度计算需转换为弧度。
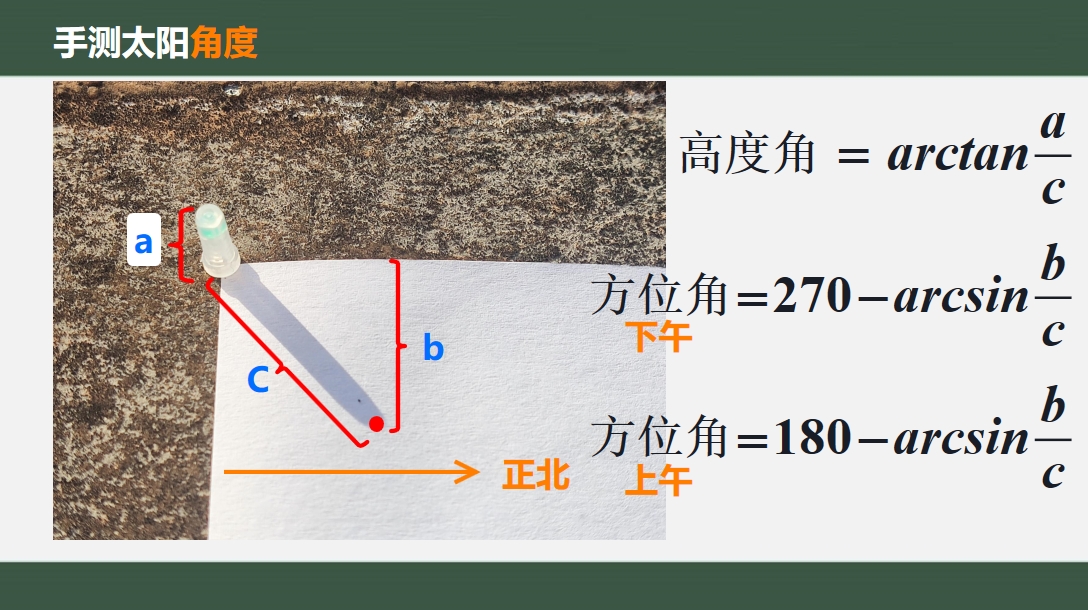
步骤3 实验验证(实验报告模板在附件)
城市:福建省南平市
经纬度:东经 118.5° 北纬 28.0°
日期:2024年12月26日
| 序 号 | 时 间 | 测量高度角 | 公式高度角 | 测量方位角 | 公式方位角 |
|---|---|---|---|---|---|
| 1 | 8:06 | 13 | 12.63 | 125 | 125.46 |
| 2 | 9:13 | 24 | 23.81 | 136 | 136.58 |
| 3 | 10:26 | 34 | 33.23 | 152 | 152.38 |
| 4 | 11:55 | 39 | 38.53 | 176 | 176.77 |
| 5 | 14:50 | 26 | 25.16 | 221 | 221.70 |
| 6 | 15:23 | 20 | 20.03 | 227 | 227.73 |
| 7 | 16:58 | 2 | 2.89 | 242 | 241.50 |
测量所得数值与公式计算数值误差在1度以内,考虑到手工测量时的操作误差和公式计算时部分参数使用的是近似值,测量数值与公式误差很小,公式准确可靠。
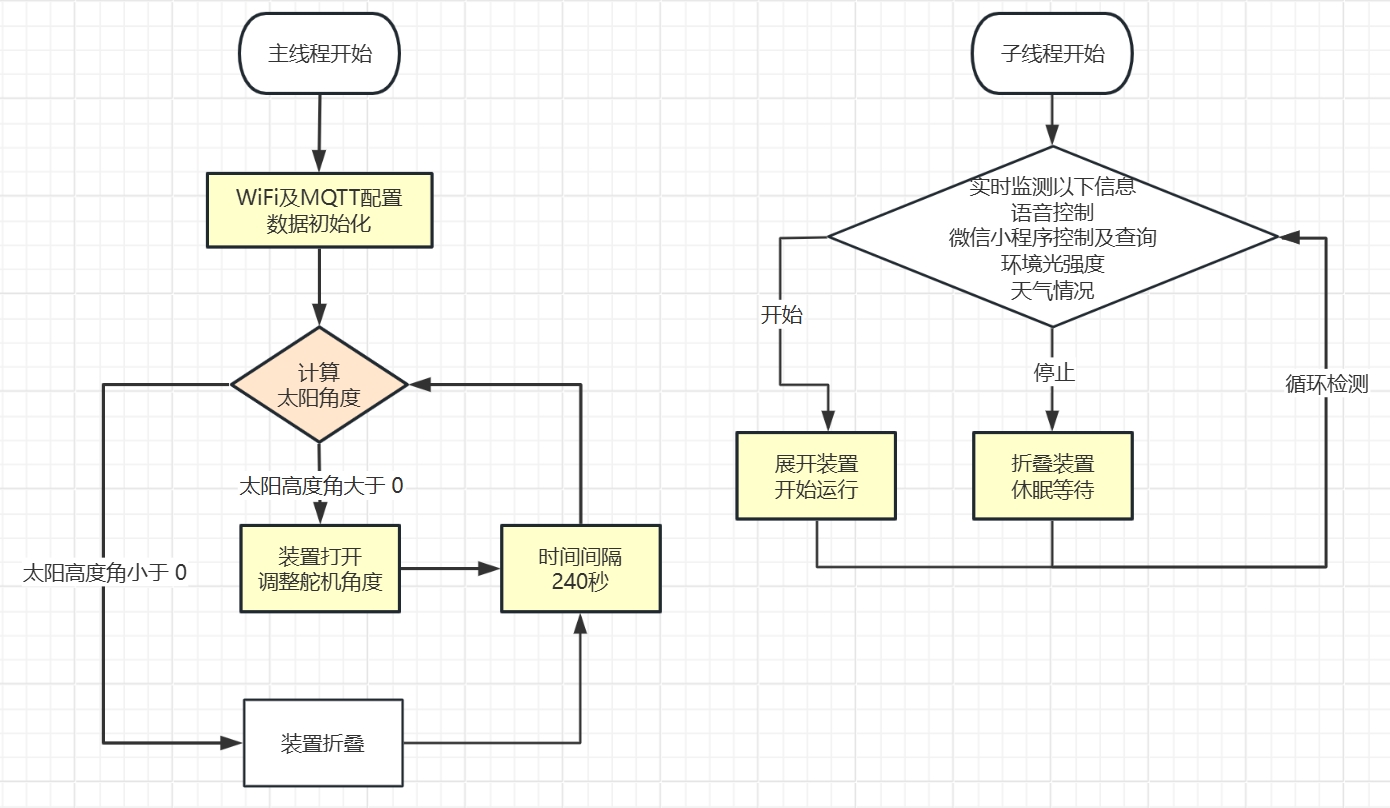
步骤4 功能设计
1.根据太阳高度角和方位角实时调整太阳能电池板角度。
考虑到项目使用的器材9G舵机精度为1°,计算可得最少4分钟调整一次太阳能电池板角度即可。
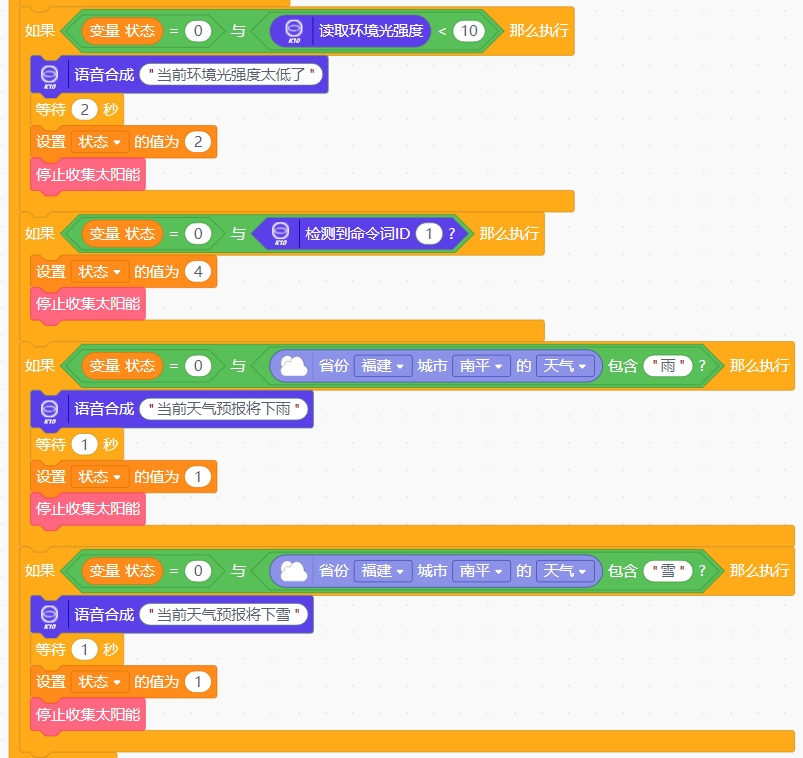
2.当遇到恶劣天气(如雨雪天气),自动关闭装置,并在晴好天气自动打开。
3.当环境光强度过低时,自动关闭装置,并在环境光强度恢复时自动打开。
4.当太阳高度角小于等于0°,即日落时自动关闭装置,并在日出时自动打开。
5.实现人工智能语音控制装置打开和关闭。
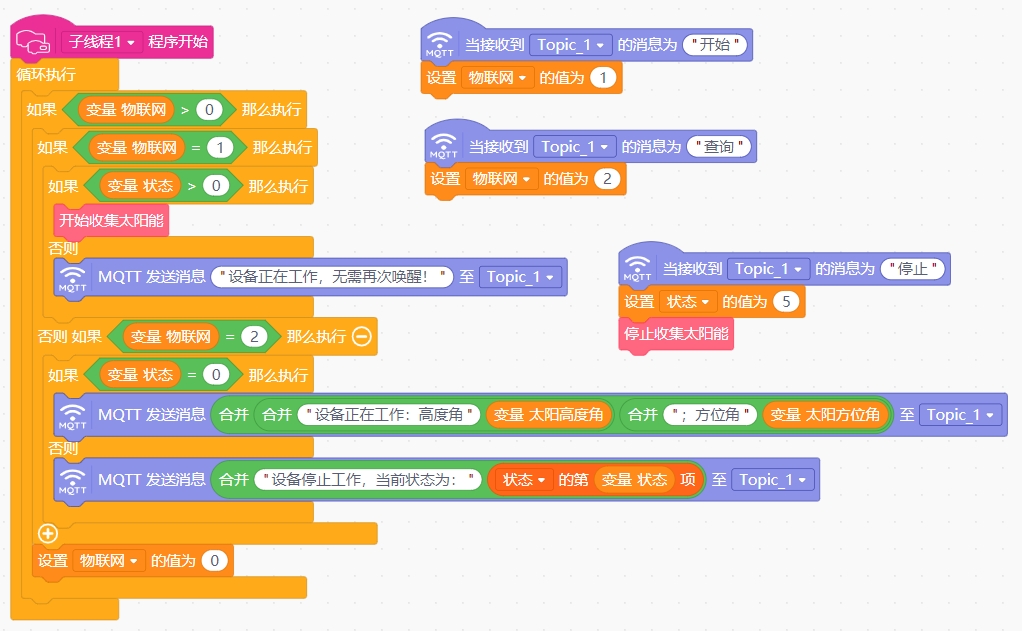
6.实现物联网微信小程序远程打开和关闭装置,并可远程查看装置运行状态。
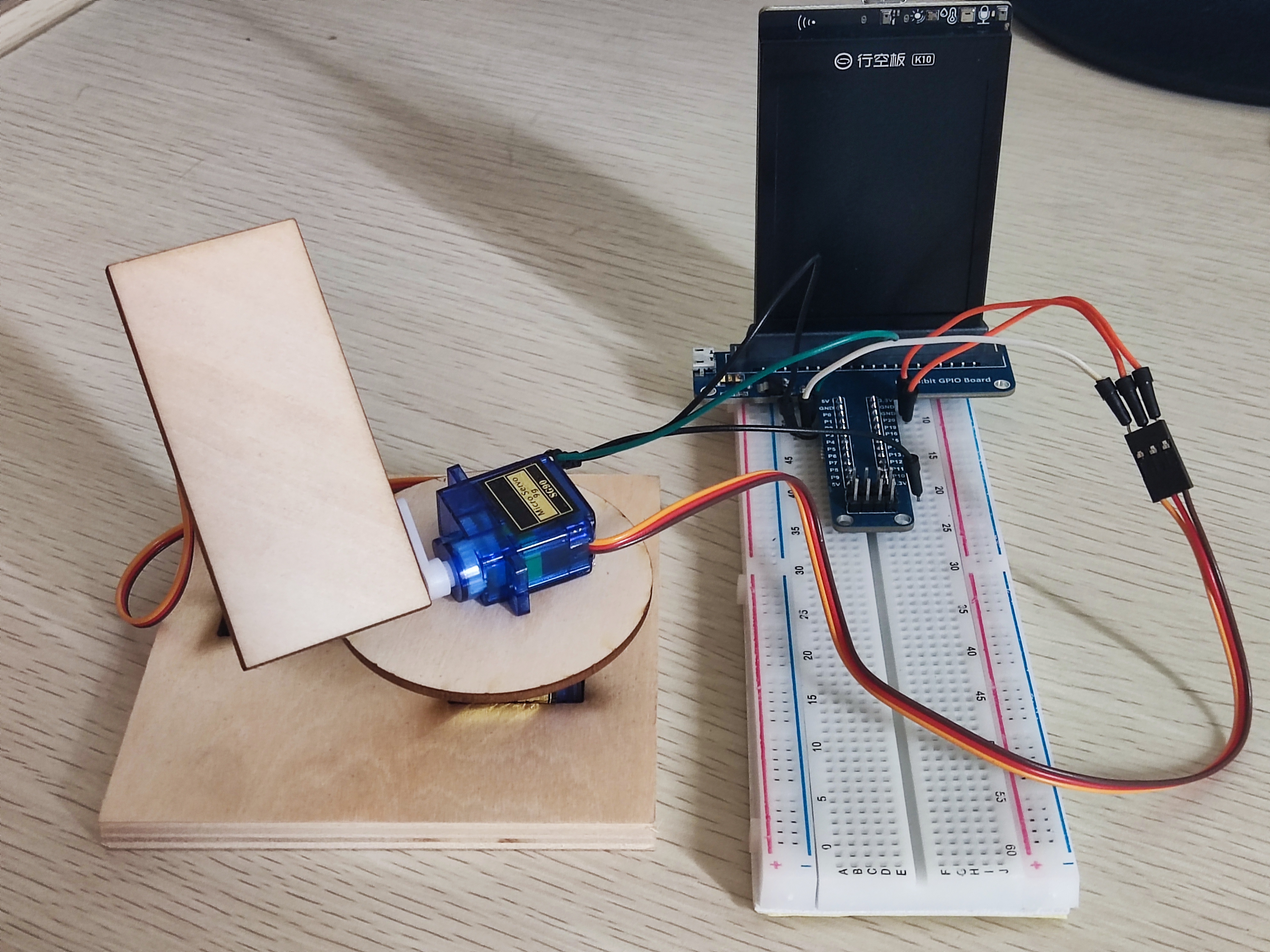
步骤5 模型制作
1.用激光切割机,切出三块椴木板,分别作为正方形底座、圆形旋转平台和放置太阳能电池板。
2.用502胶水固定9G舵机和椴木板。
3.使用杜邦线连接各个硬件。
步骤6 编程实现(仅展示部分关键代码,完整程序在附件)
1.太阳高度角和方位角的角度计算。
2.物联网远程控制和设备状态远程查看(部分代码)。
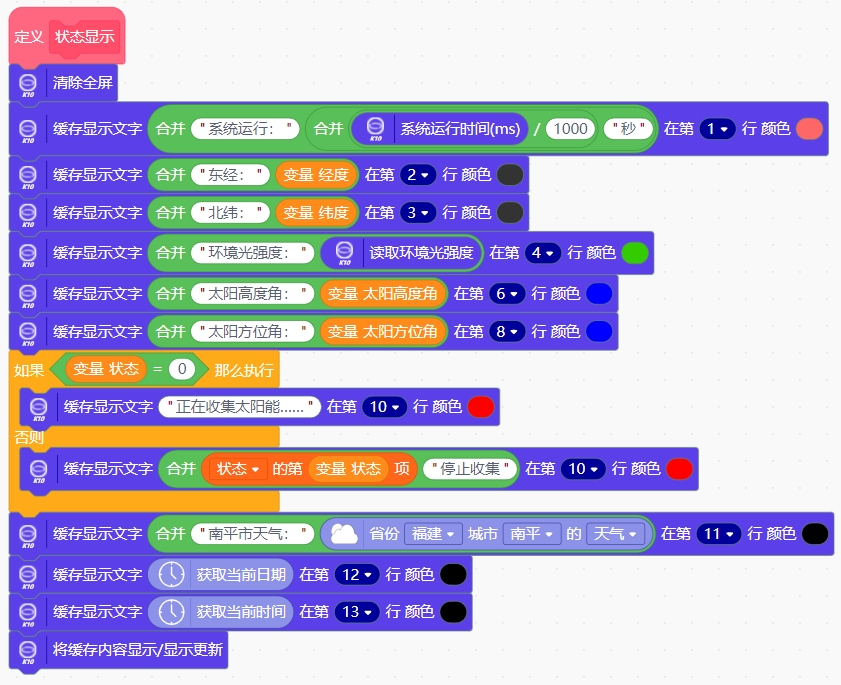
3.行空板K10主屏幕状态信息显示。
4.装置展开和折叠收起控制子程序。

5.人工智能语音控制及根据环境光强度、天气情况等信息自动展开和折叠收起太阳能电池板(部分代码)。
设置状态变量对设备状态统一管理,方便从各种状态中激活设备。

后续迭代
1.增加电池管理功能,当电量充足时停止充电,折叠休息,保护设备。
2.增加移动充电功能,假设设备安装在车顶,当车辆行驶时,无论上坡下坡、左右转向甚至是路面颠簸,依然实时调整太阳能电池板角度,确保太阳光直射电池板。


 他的勋章
他的勋章

评论