 返回首页
返回首页
 回到顶部
回到顶部
1.25 雪
国庆节,去合肥追光,听专家讲座,参观EAST-东方超环,这几天刷到EAST--人造小太阳又创造新纪录,很是开心啊。



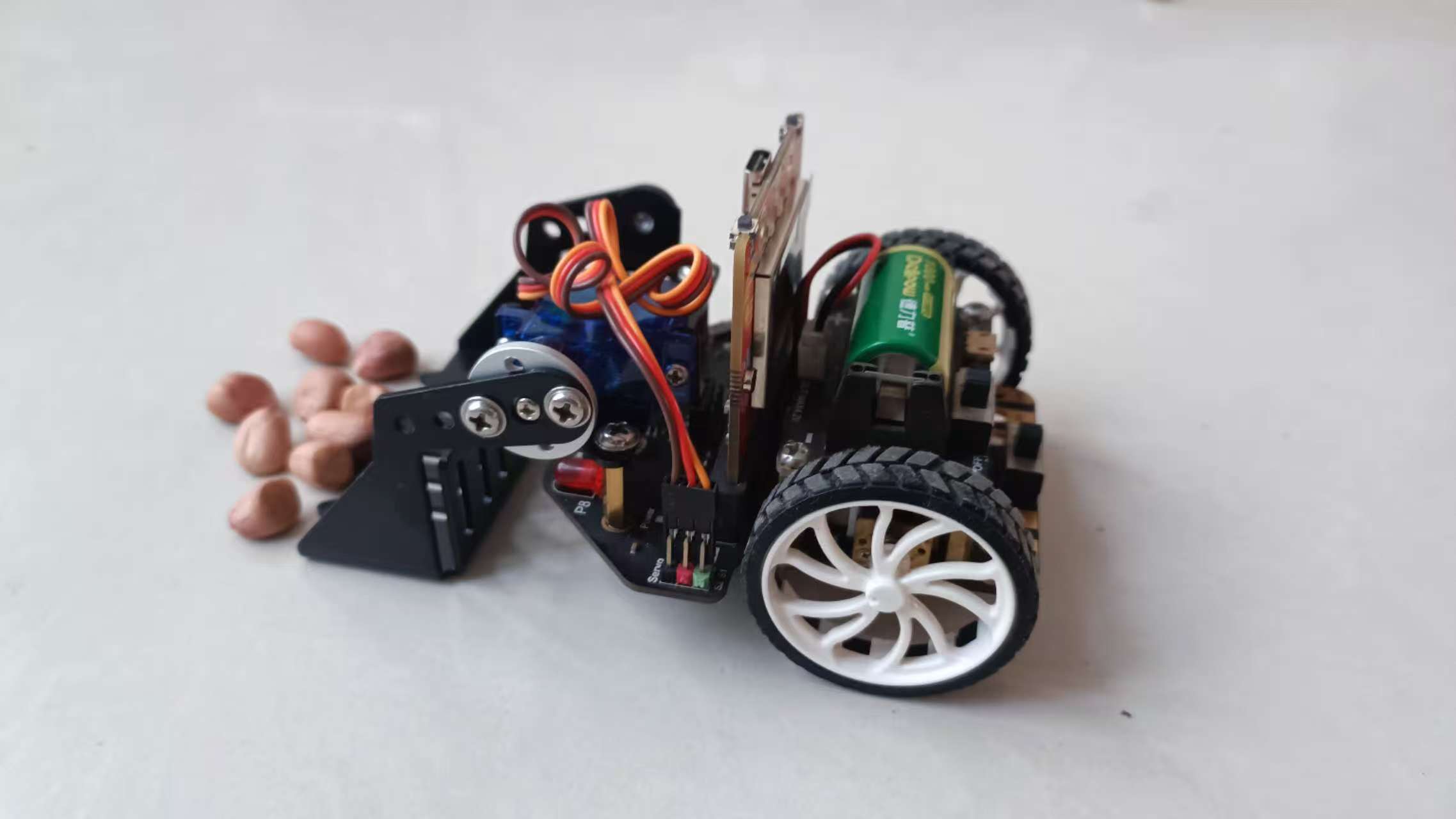
昨天论坛里看到云天老师的语音控制K10小麦昆,那上面的小夹子真是让人喜欢,我想到了,我手上有一个装载机配件。

可以和小麦昆组成小铲车,所以我就打算做个掌控麦昆小铲车,用K10语音遥控它。

组装完装载机后,就进入编程阶段了,用无线广播让掌控板和K10通信。
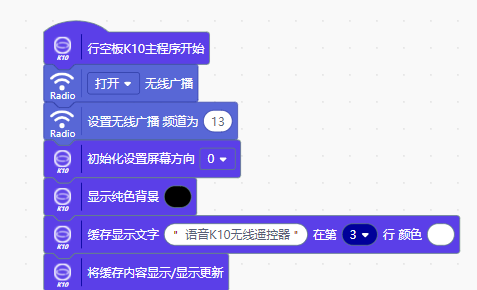
K10无线语音遥控器

 无线广播,频道13
无线广播,频道13
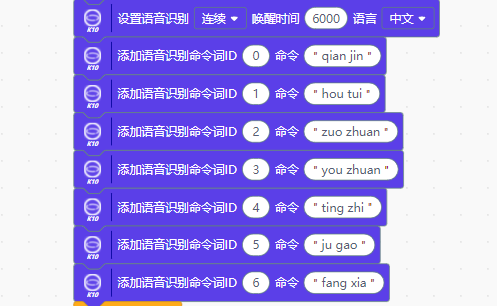
 语音识别命令词ID定义
语音识别命令词ID定义
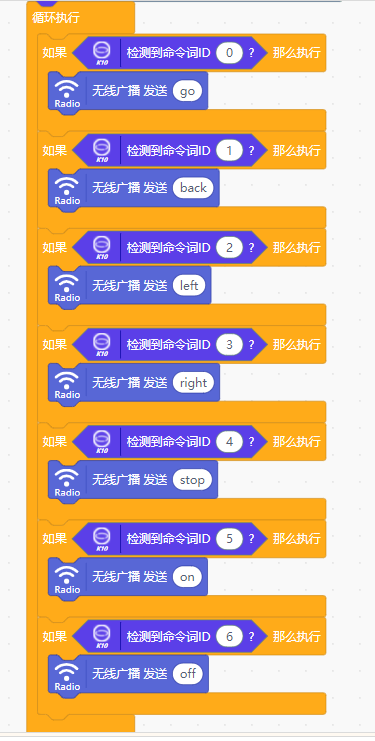
 识别到关键词发送消息
识别到关键词发送消息
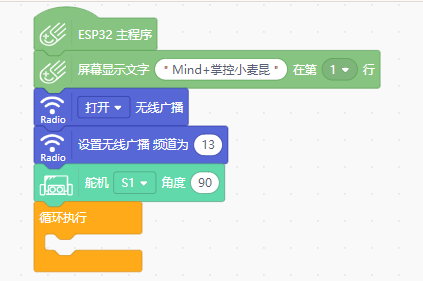
掌控麦昆装载机:


无线广播,频道13,舵机90度,铲子举高高。
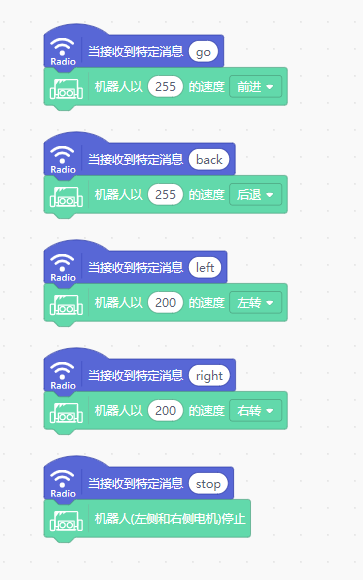
前进、后退、左转、右转、停止的消息约定。
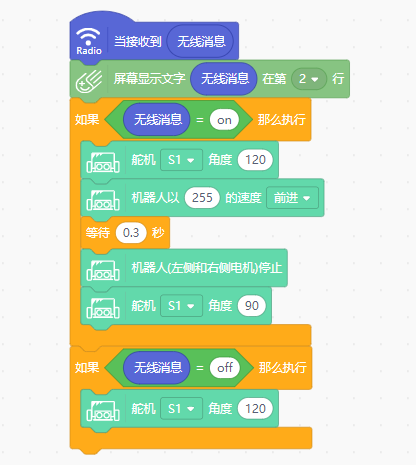
装载和放下铲子的动作与消息约定。这里要注意的是,舵机控制不能用当接收到特定消息积木。
小结:
语音控制测试通过,可是语音识别毕竟还是有些延迟,动作精度不好掌控,还是造个用摇杆模块的遥控器吧。
附件
后记:
后续优化,地板光滑摩擦力小,为解决左转、右转打滑的问题,程序作点小优化。
 两个电机一起发力,转动起来就力量很足了。
两个电机一起发力,转动起来就力量很足了。
这将展示在下一个作业中。
另外:电池电力要足,不然舵机会出现一些奇奇怪怪的现象。


 他的勋章
他的勋章

评论