 返回首页
返回首页
 回到顶部
回到顶部

一、【项目背景】
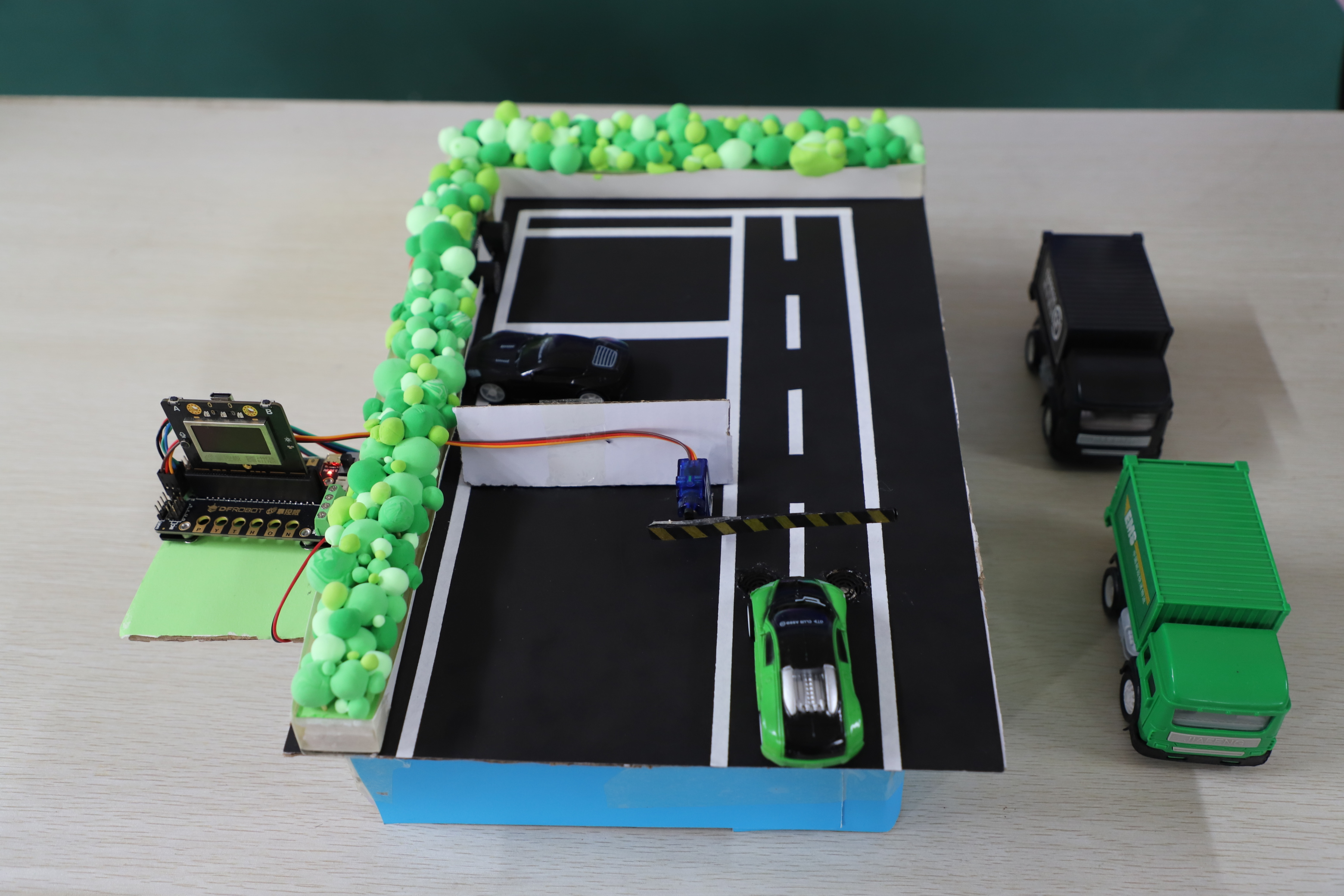
当司机排队进入停车场时,结果司机发现停车场已经没有空闲车位而感到烦恼,面对地形复杂的停车场,司机因为找不到空闲的车位,而浪费宝贵的时间,增大了城市停车压力。为了节约停车时间、提高出行效率,避免因找停车位浪费时间而降低人民享受度,同时可以减少车辆寻找停车位置时所产生的多余碳排放。设计一款《基于掌控板的智慧停车场》。
二、【功能介绍】
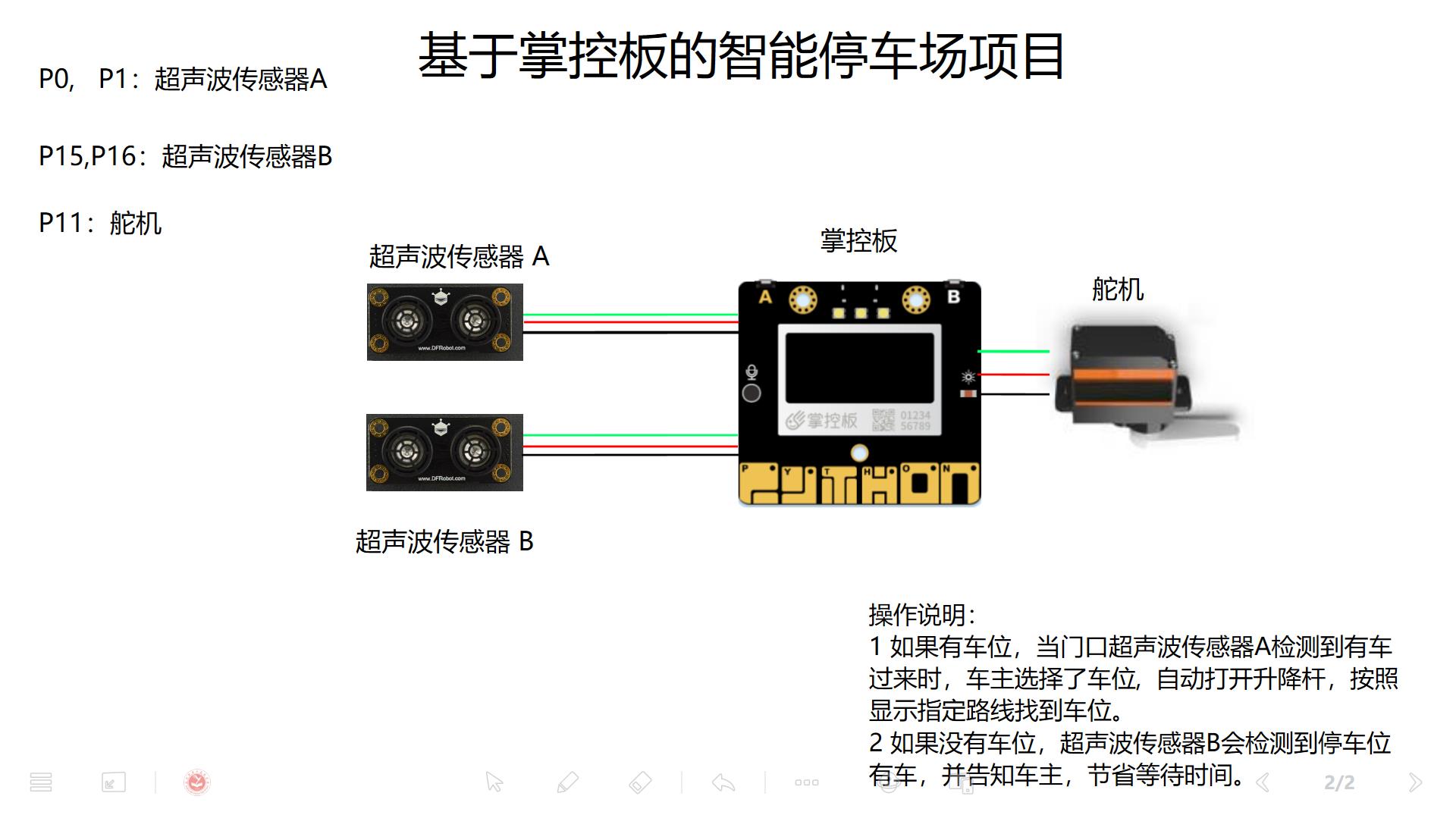
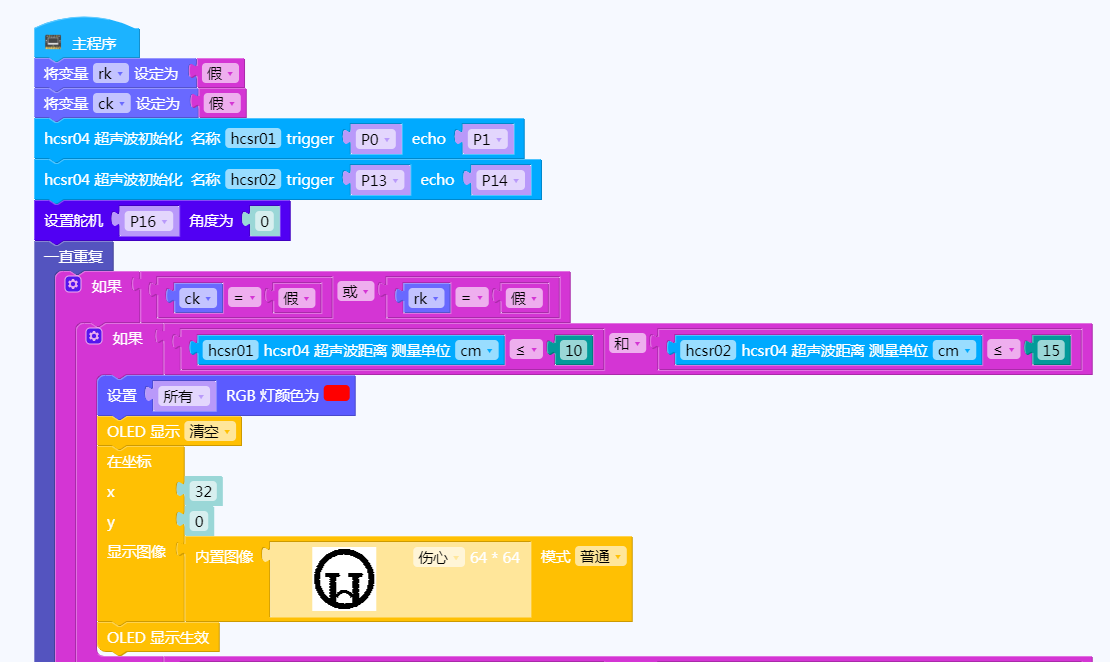
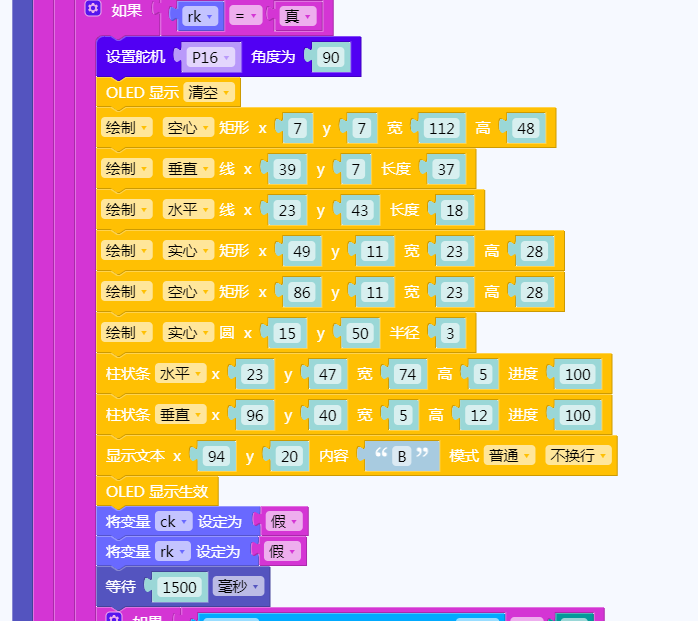
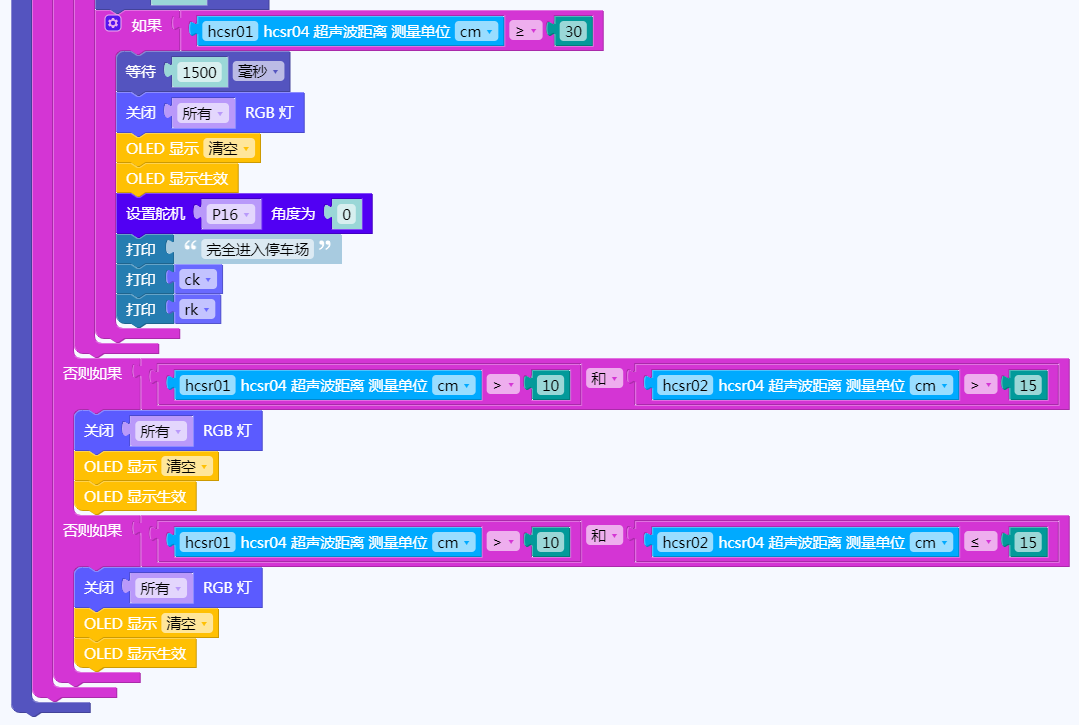
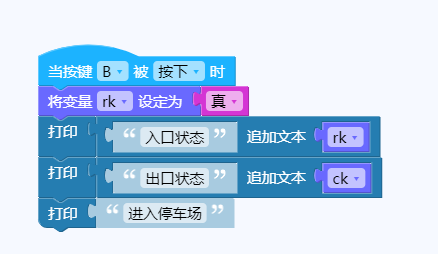
1.当停车场有空车位时,门口超声波传感器检测有车辆时,将检测到信息传送至掌控板(手机)处,车主按下掌控板上的B键显示停车场电子地图,则舵机控制的升降杆升起,司机按照电子地图找到停车位;
2.当停车场无车位时,车位超声波传感器通过网络发送出去,司机查看到手机小程序收到信息及时离开;当车辆离开停车场时,司机可以手机程序付费离开。

三、创新点:
区别于普通停车场,这是一个模拟带有导航与地图的手机小程序,通过电子地图可供司机直接明确的查看该停车场内是否有停车空位,且可供自行选择停车位置,更节约时间,且能减少汽车的碳排放,更加绿色环保。
四、电路接线图
五、程序编写
(一)准备编程环境
步骤1 打开mPython,数据线连接掌控板
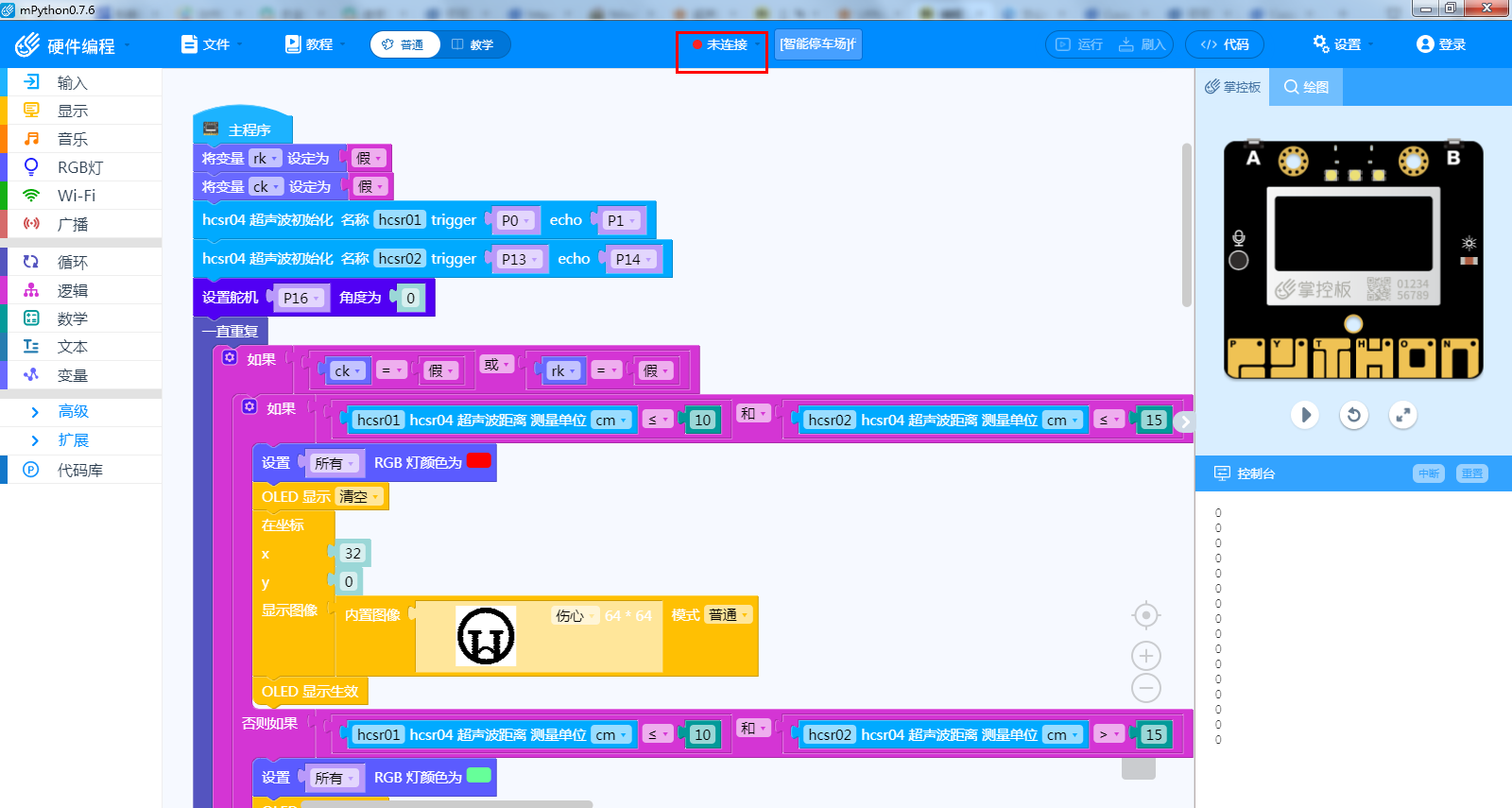
步骤2 左下角添加扩展,传感器选项添加hcsr04超声波

步骤3 左下角添加扩展,执行器选项添加舵机

(二)编写程序

六、需进一步研究的问题:
①对于物联网的部分,要实现车辆在停车场内的精准定位,正确引导车辆停放和寻找空闲车位,提高系统的稳定性和可靠性,减少故障率和维护成本,通过优化停车程序、提供多种支付方式等手段,提升用户在停车场内的停车体验;加强网络安全防护,保障用户信息的安全,
②为进一步提升智慧停车场服务的全面性,对于程序的功能也需添加【譬如:车主也可以通过程序预约车位;倘如车主进入停车场内发现自己预约的车位被占用了怎么解决;如若车主进入停车场后并没有前去自己所选择的指定车位应怎么处理等】


 他的勋章
他的勋章
罗罗罗2024.10.13
666
橙子昂2024.07.09
赞666
_深蓝_2024.05.23
赞👍👍👍
周x2024.05.15
赞666
许培享2024.05.13
赞👍👍👍