 返回首页
返回首页
 回到顶部
回到顶部
一、项目背景
现在现在饲养小猫和小狗的家庭越来越多,如果主人短期出行,宠物就会面临不能及时喂养的困境。于是我们利用开源硬件给出了一个解决方案,设计出“智能宠物喂食机”装置。不仅可以解决宠物喂养的难题,提高生活品质,也可以应用到流浪动物的救助中,为智慧社区建设提供参考。
二、功能介绍
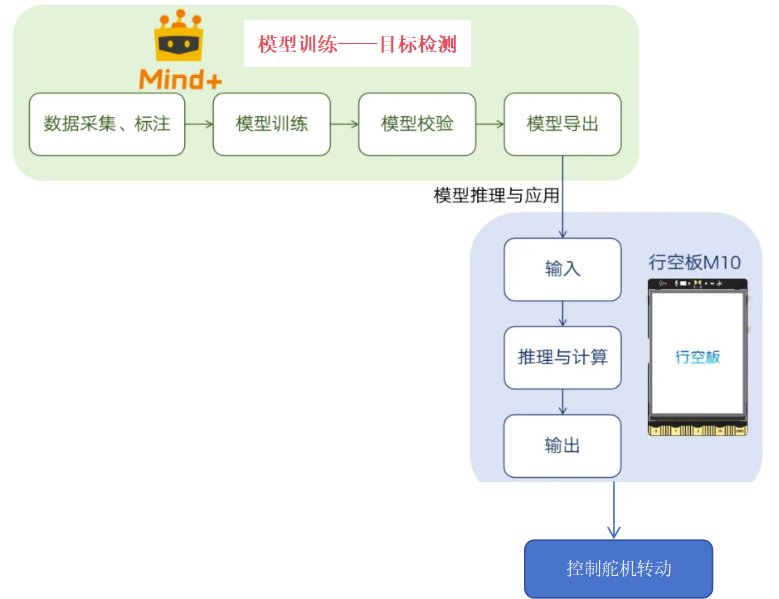
利用Mind+2.0中的模型训练工具,通过“数据采集并标注”——“模型训练”——“模型校验”——“模型导出”的过程,训练一个“目标检测”模型,这个模型的功能就是识别出摄像头里的小猫和小狗。
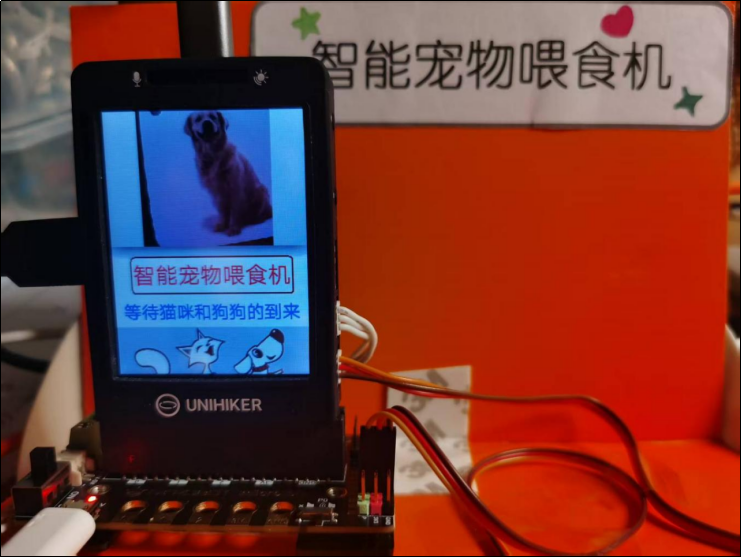
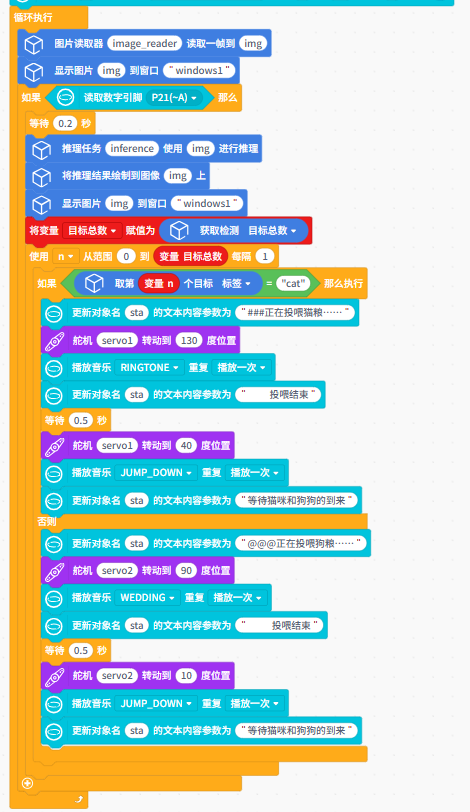
部署这个提前训练好的“目标检测”模型到行空板M10,运行过程中,外接在行空板上的USB摄像头会一直拍摄画面,当按钮被按下后触发识别,模型就会开始推理和计算,如果从摄像头画面里找到了小猫或小狗,就控制对应的舵机转动,模拟猫粮和狗粮的食盒打开,并播放音乐,音乐结束后舵机转回原位,模拟食盒关闭,实现智能喂食。
三、制作过程
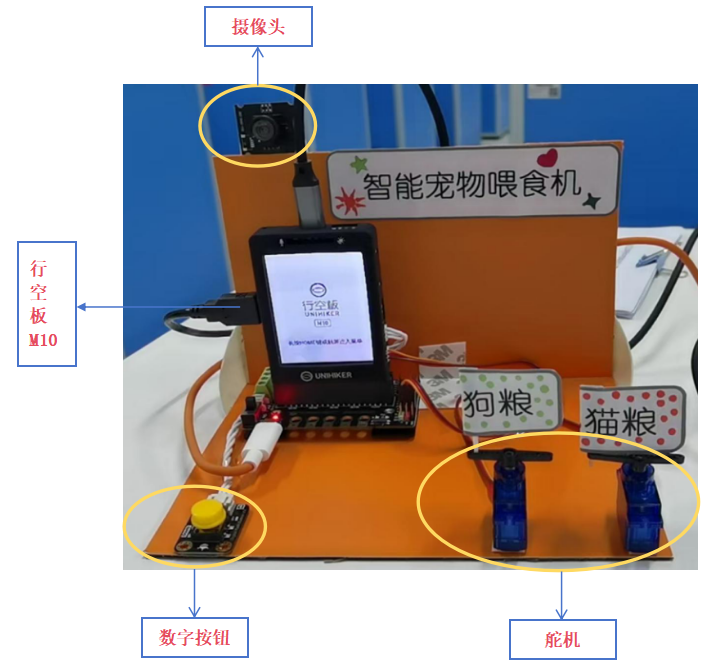
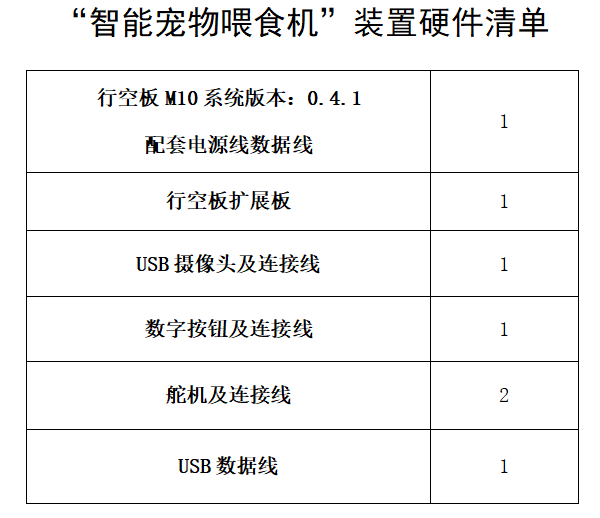
1.硬件系统搭建
以行空板M10为控制核心,用USB摄像头捕捉画面,用数字按钮触发识别,用部署在行空板上的“目标检测”模型检测画面中出现的目标,如果识别到小猫或小狗,控制对应的舵机转动,模拟猫粮或狗粮的食盒打开同时播放特定的音乐。为了控制投喂食量,在音乐停止后舵机转回原位,模拟食盒关闭。
2.“目标检测”模型训练
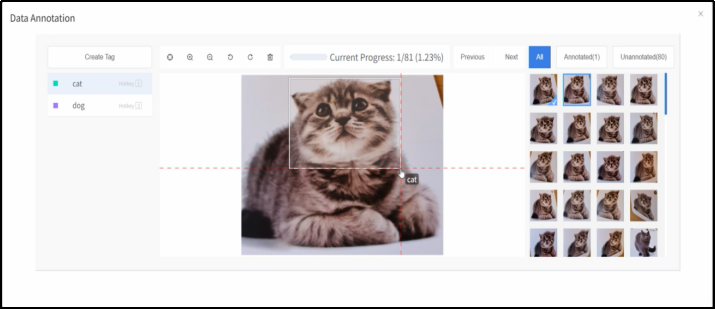
(1)数据采集与标注
本项目的程序设计使用Mind+软件的2.0版本。
在Mind+2.0中,使用“目标检测”模型训练模块,首先导入100张的小猫和小狗的图像文件数据,并对每一张图像进行标注,为后续模型训练做数据准备。
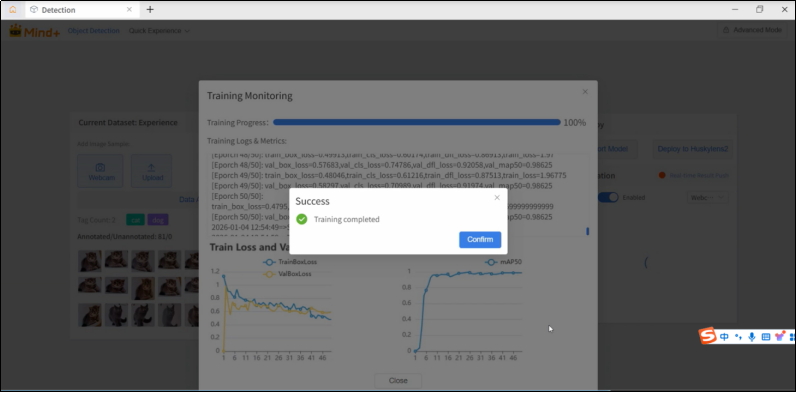
(2)模型训练
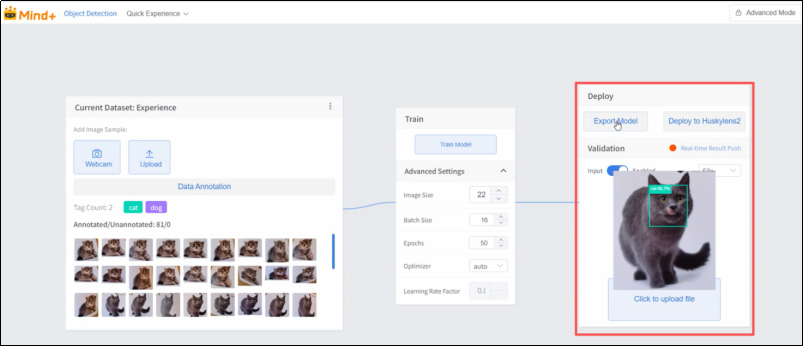
(3)模型校验并导出
通过模型校验判断识别效果,当识别可信度在90%以上,表示识别效果好。否则需要从图像数据的数量、标注是否合适等方面做调整,重新训练模型。
模型训练结束后,导出模型。
3.部署模型到行空板M10上
将训练好的“目标检测”模型部署在行空板M10上,然后M10就可以使用这个模型识别摄像头捕捉的画面中是否有小猫或小狗。

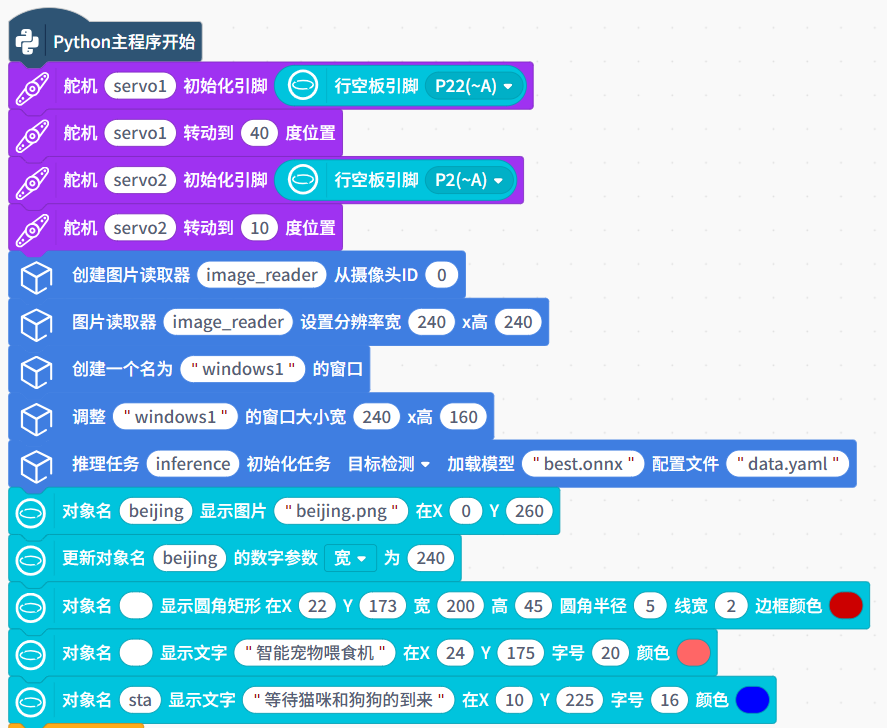
4.在Mind+2.0中编写主程序
根据要实现的功能,编写主程序。主要有初始化外部设备、设计界面、加载模型、使用模型推理判断、控制舵机等几个部分。
通过网盘分享的文件:智能宠物喂食机模型文件+源代码
链接: https://pan.baidu.com/s/1fdNdumjeRloXL2VBQmDjig?pwd=933f 提取码: 933f


 他的勋章
他的勋章

评论