 返回首页
返回首页
 回到顶部
回到顶部
9.21
【目标任务】
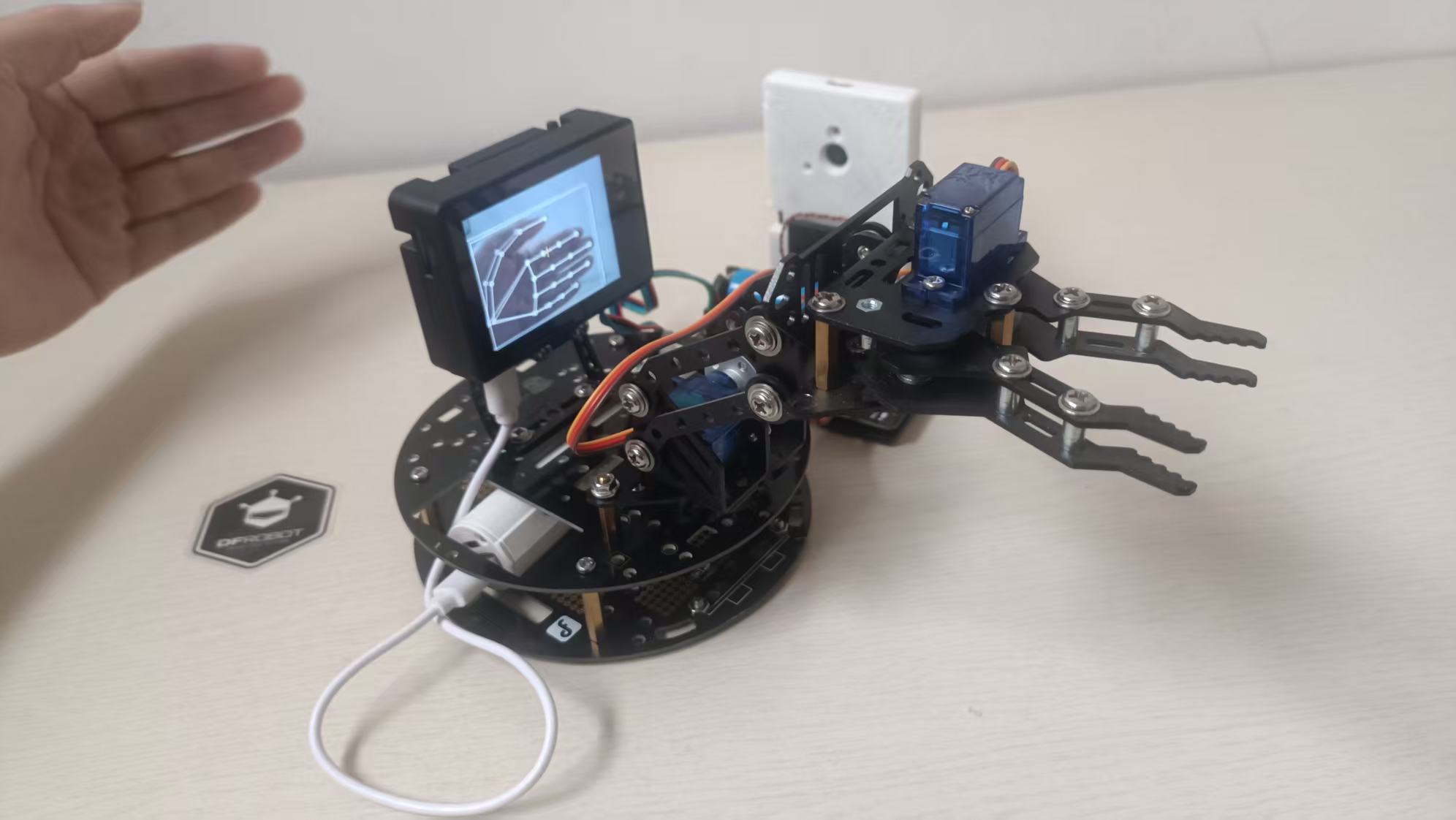
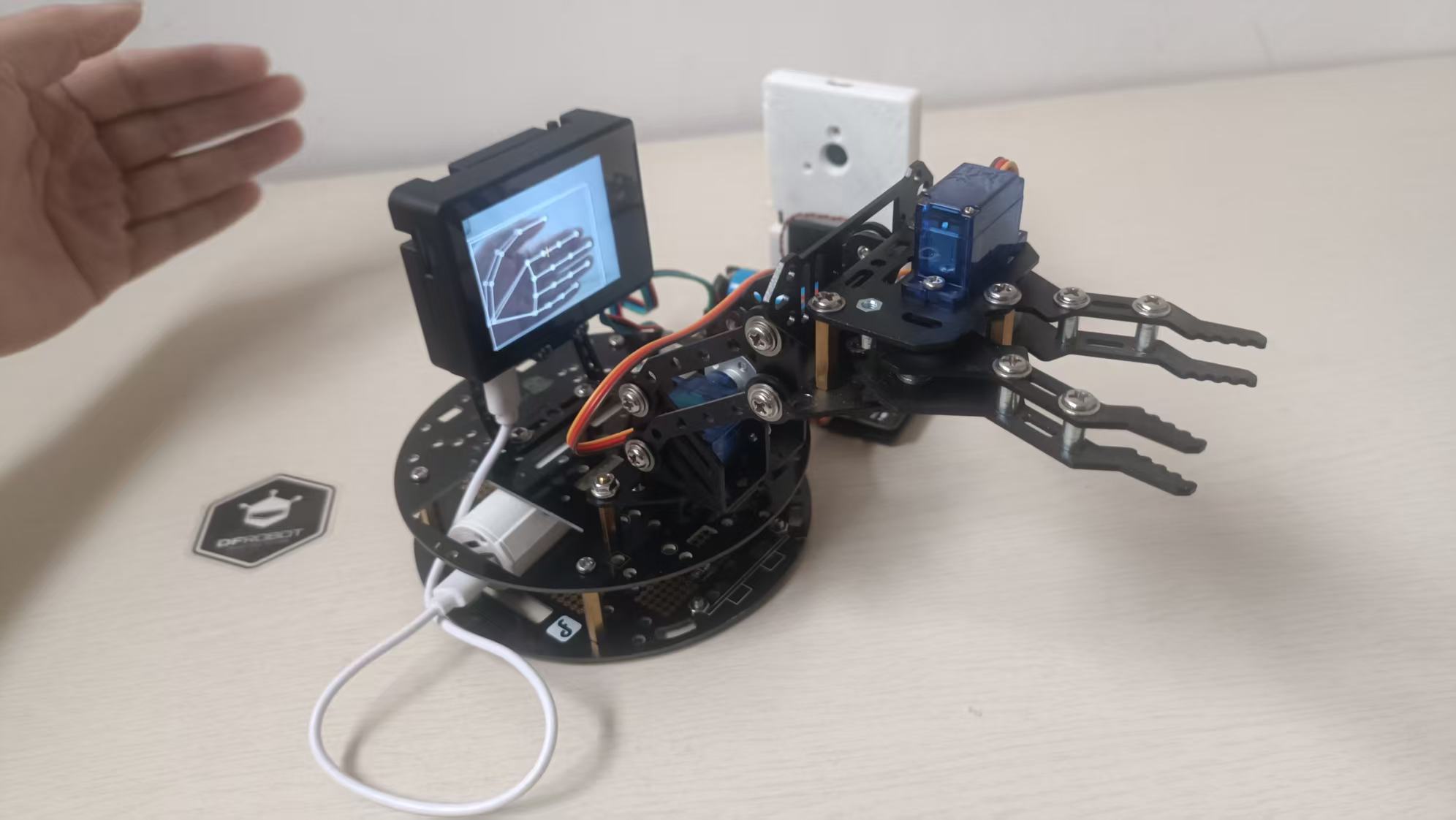
在这个小项目中,将体验使用Huskylens 2进行手势识别,并通过识别结果控制机械臂上的两个舵机(S0、S1),实现手势控制机械臂的升降与机械爪夹取物品。

二哈识图2wiki:
测试视频如下:
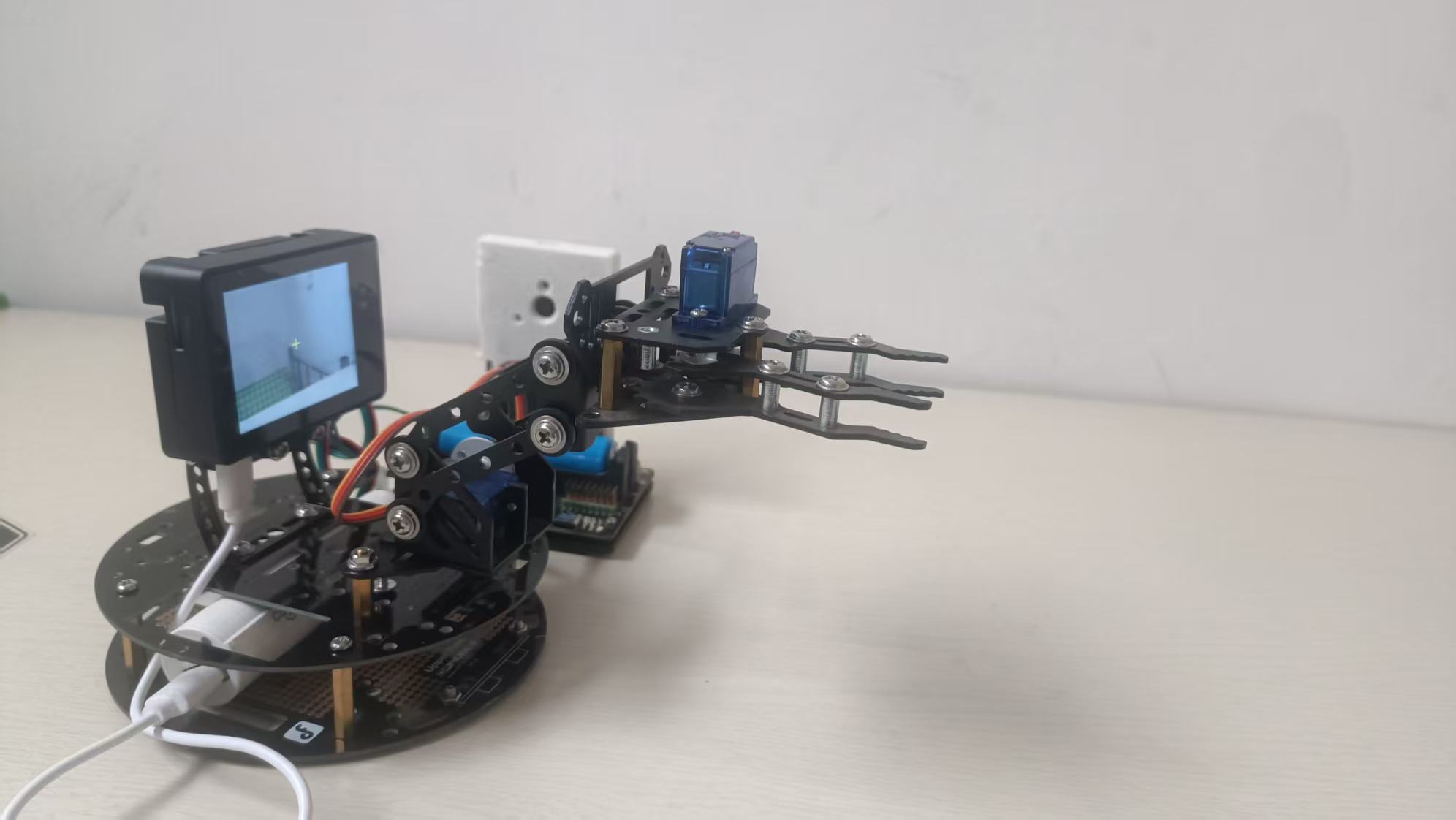
步骤1 组装机械臂与舵机测试
设备组装:
机械爪舵机接扩展板S0,机械臂舵机接扩展板S1。
强劲驱动性能,稳定运行多路设备
采用独立电源管理,可同时驱动4路直流电机和6路大电流舵机,避免电源干扰导致的抖动或失控。另提供5V I2C接口可驱动二哈视图等大功率设备,满足机器人等高要求场景。
二哈识图2接扩展板I2C(5V)。
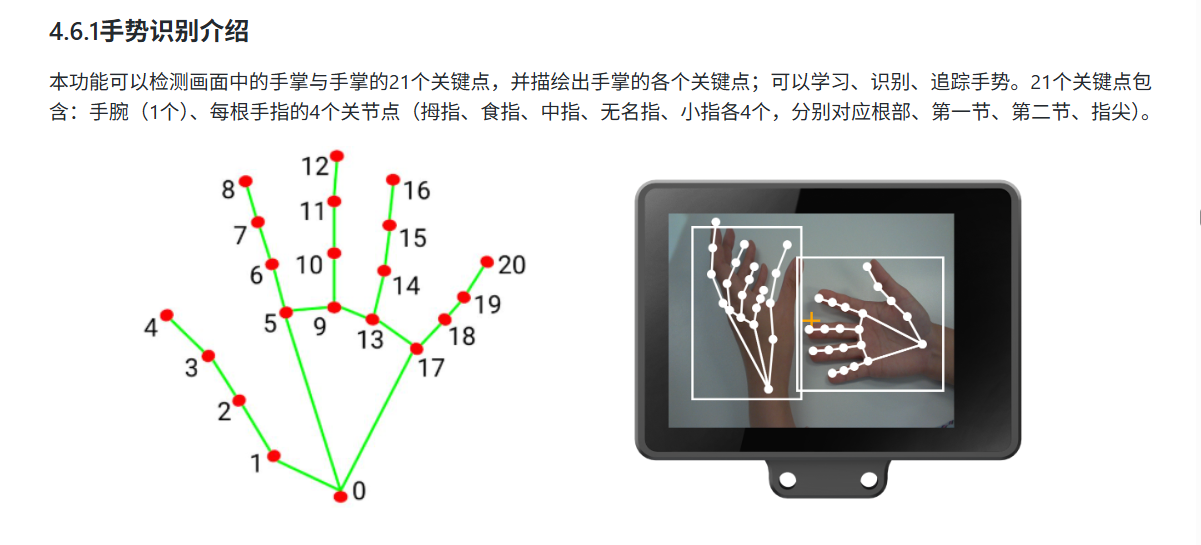
二哈2手势识别资料,在本项目中不需手势学习,只需识别手掌关键点,获取相关关键点数据:


为了节约扩展板电池电力,二哈识图2用小充电宝供电。
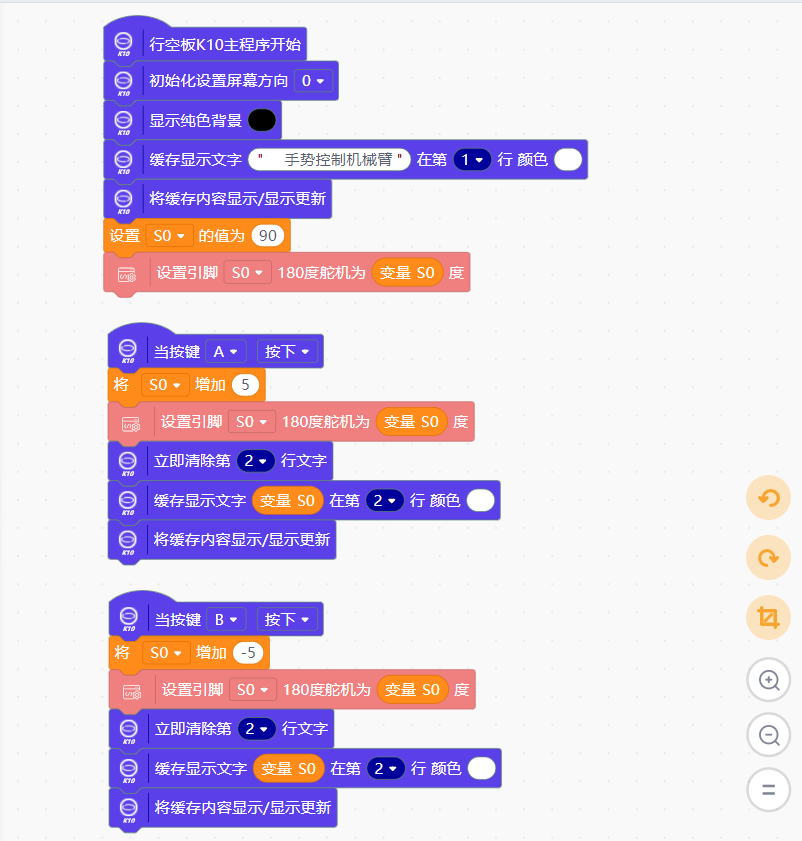
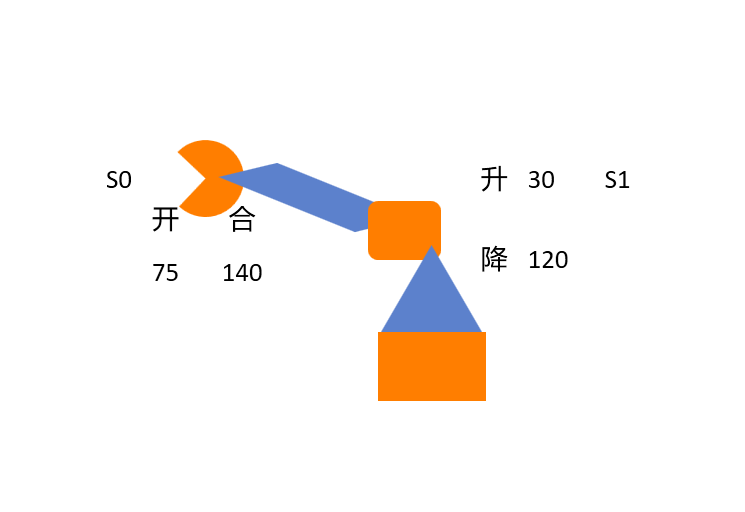
编写测试程序,测试S0机械爪舵机的开合极限角度。
软件:mind+1.8.1
主控:行空板K10
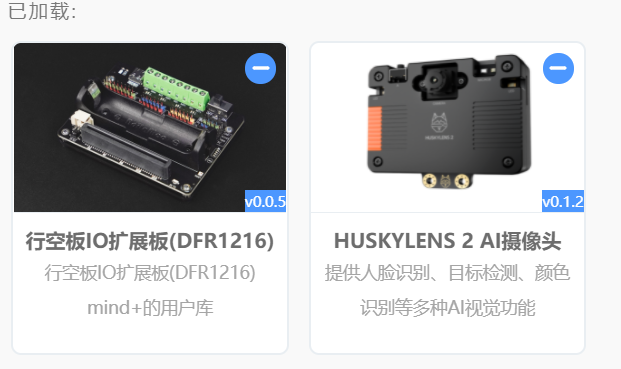
扩展:添加用户库
修改S0为S1,测试机械臂舵机舵机举高与降低的极限角度。
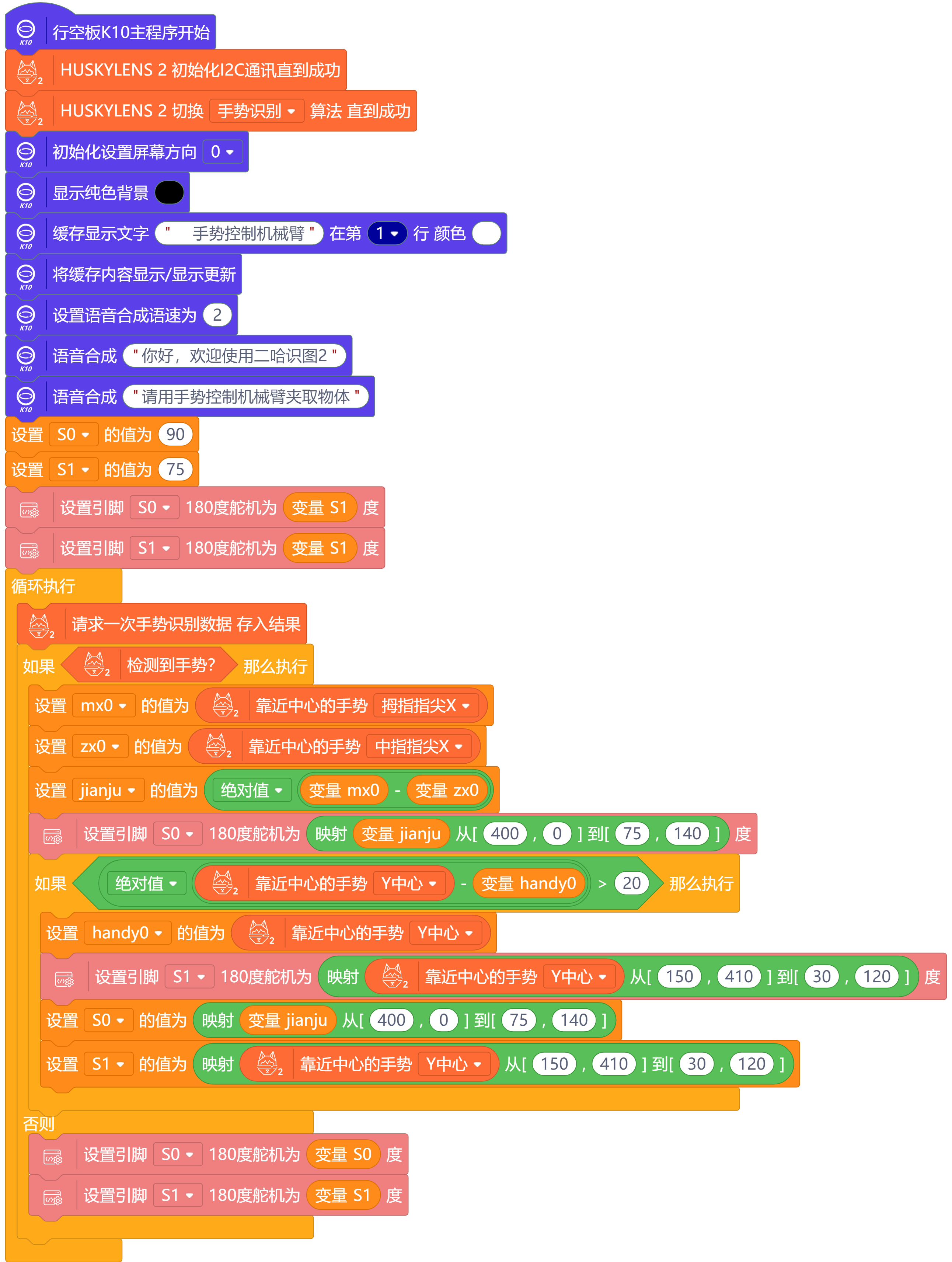
步骤2 程序编写
基本逻辑:
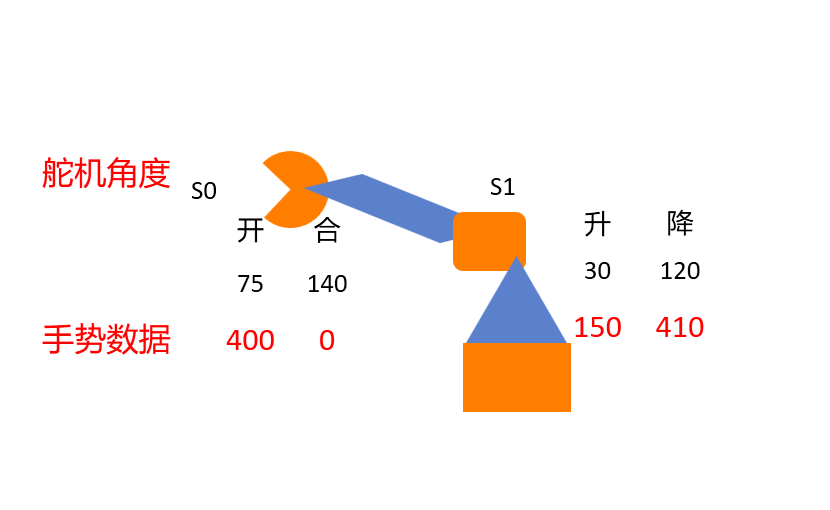
1、用中指指尖x坐标与拇指指尖x坐标间的距离变化来确定手势的开合,从而映射到机械爪的S0舵机控制开合。
2、将手势中心y坐标映射到机械臂舵机控制升降。
在正式编写程序前,可以写测试程序,将相关数据显示在K10屏幕上,为进一步控制舵机做准备:
1、读取中指指尖x坐标与拇指指尖x坐标,在二哈摄像头前手势开合根据识别数据思考与舵机角度如何映射。
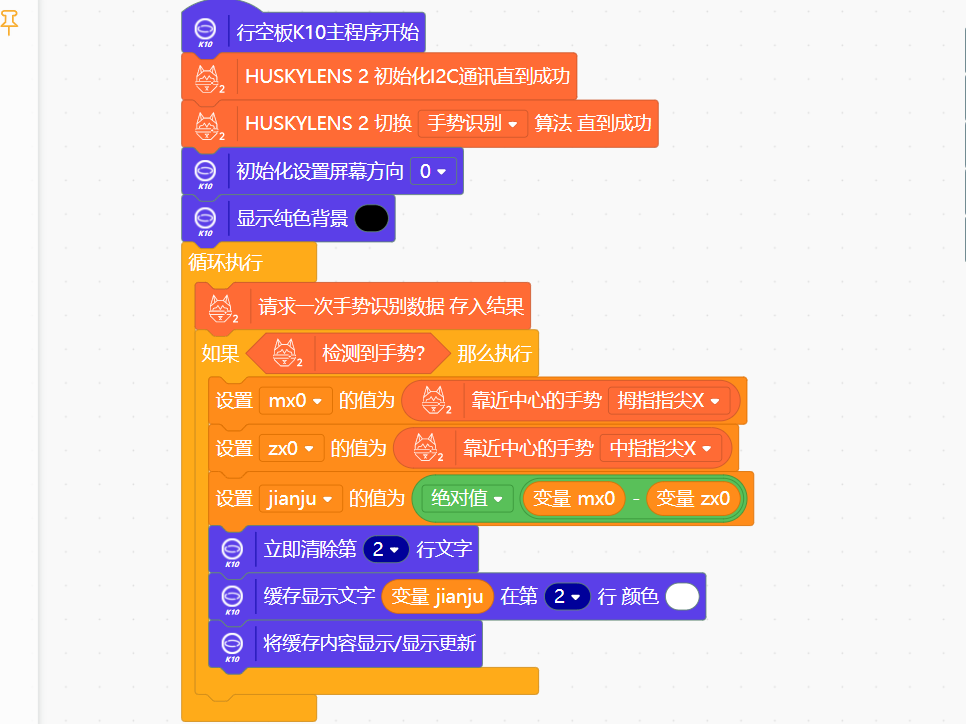
2、读取手势中心y坐标,在二哈摄像头前上下活动手势识别手势中心坐标并规划舵机角度映射关系:

数据记录:
编写程序并不断测试修改:
【项目反思】
因为编程水平所限,编写动作比较简单粗放,没有达到想像中的丝滑与细腻,请老师们继续探索,我会认真学习。


 他的勋章
他的勋章

easy猿2025.09.23
优秀
rzyzzxw2025.09.24
谢谢