 返回首页
返回首页
 回到顶部
回到顶部
B-robot EVO 2:
极快、稳定、可定制的自平衡机器人。检查机器人的运行情况!
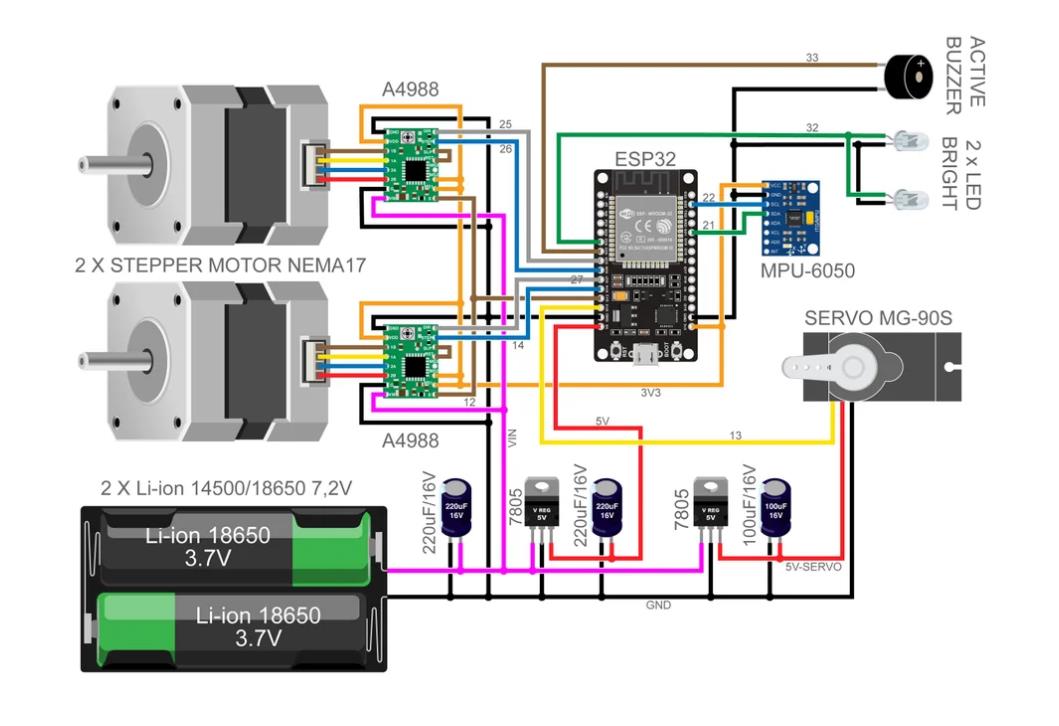
零件清单
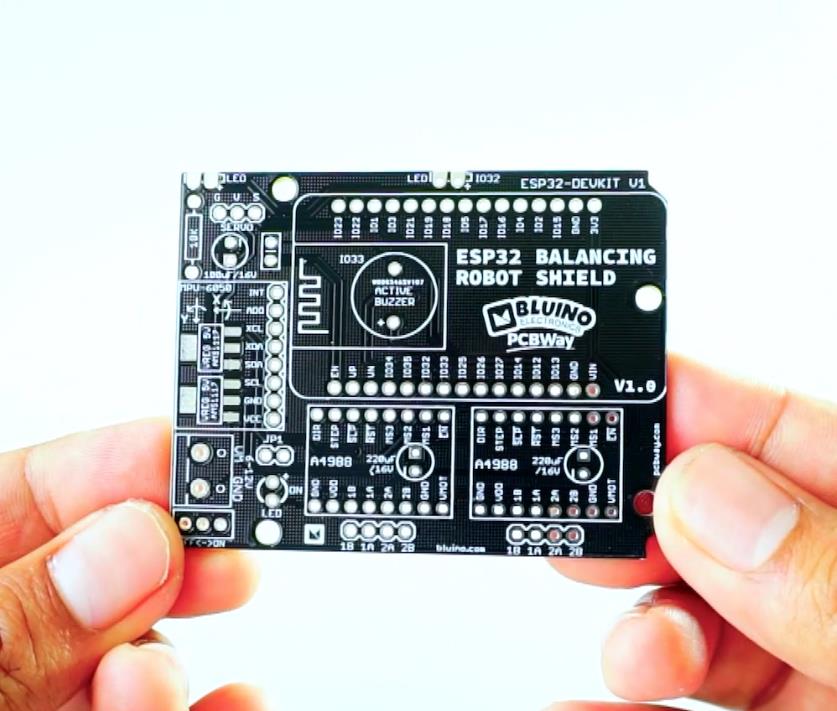
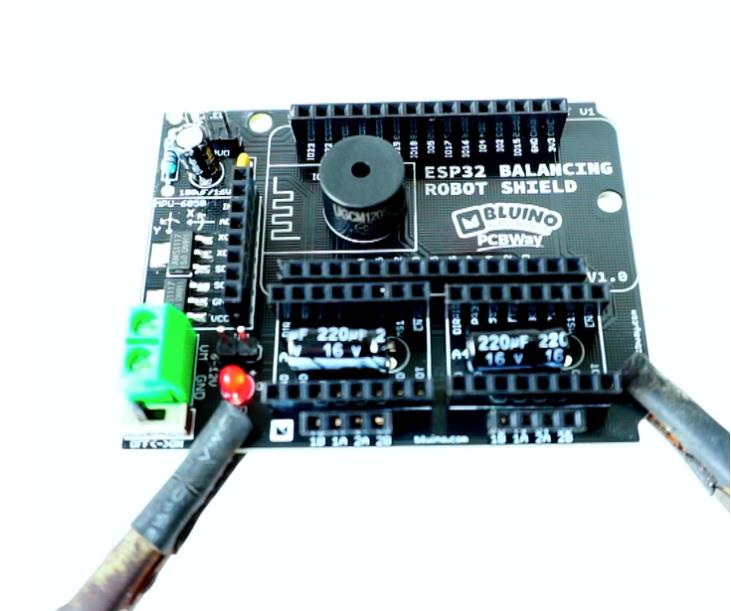
1 x PCB ESP32 平衡机器人防护罩 (https://www.pcbway.com/project/shareproject/ESP32_Balancing_Robot_Shield.html)
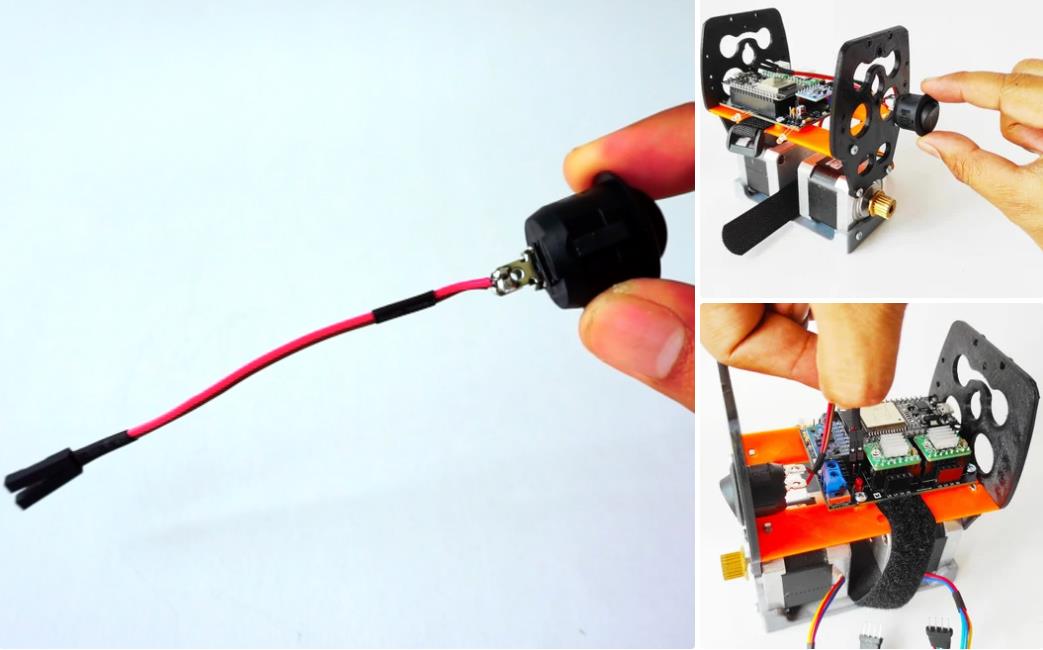
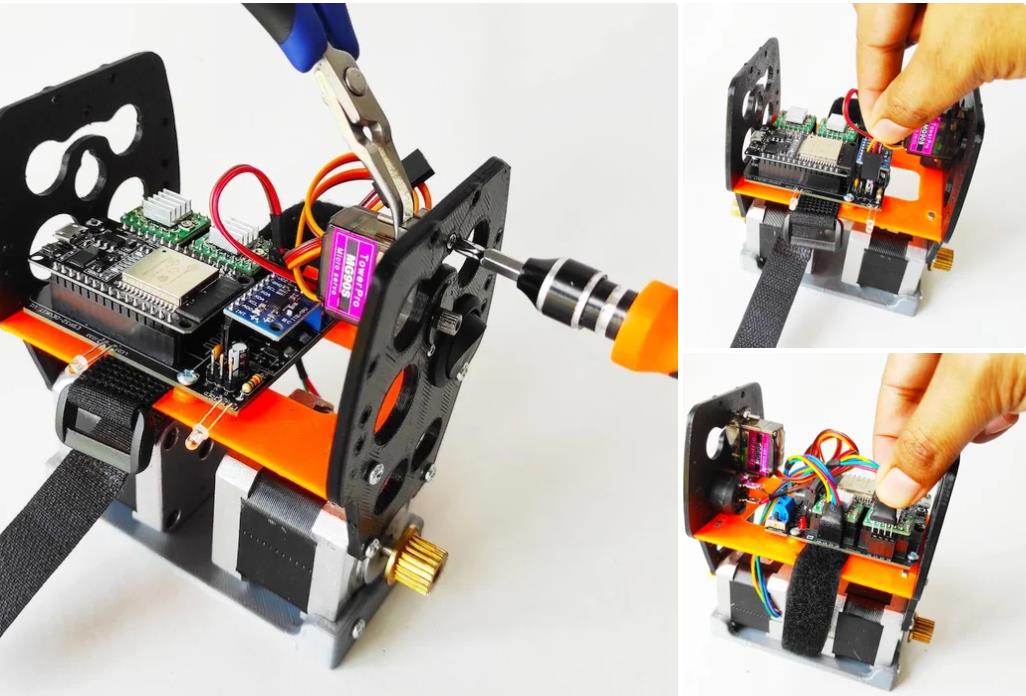
1 个 ESP32 DEVKIT V1 板
2 x 步进电机驱动器 A4988
1 x 3 轴传感器和陀螺仪传感器MPU6050
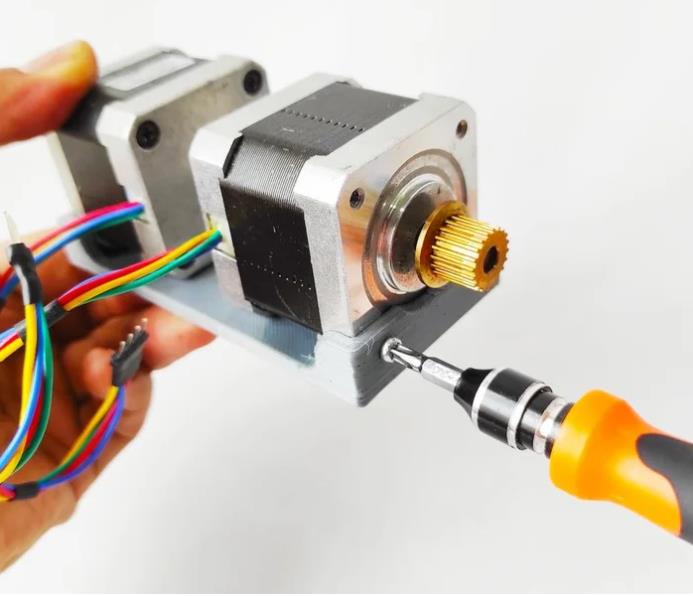
2 x 步进电机 Nema17
1 x 伺服电机 MG90S
1 x LED 3 毫米
2 x LED 3mm 白色超亮
1 x 有源 BUzzer
2 x V 稳压器 5V AMS1117 (SMD)
1 x 电阻器 1K 欧姆
1 x 电容器 0.1uF
1 x 电容器 100uF/16V
2 x 电容器 220uF/16V
1 x 翘板开关直径 20 毫米
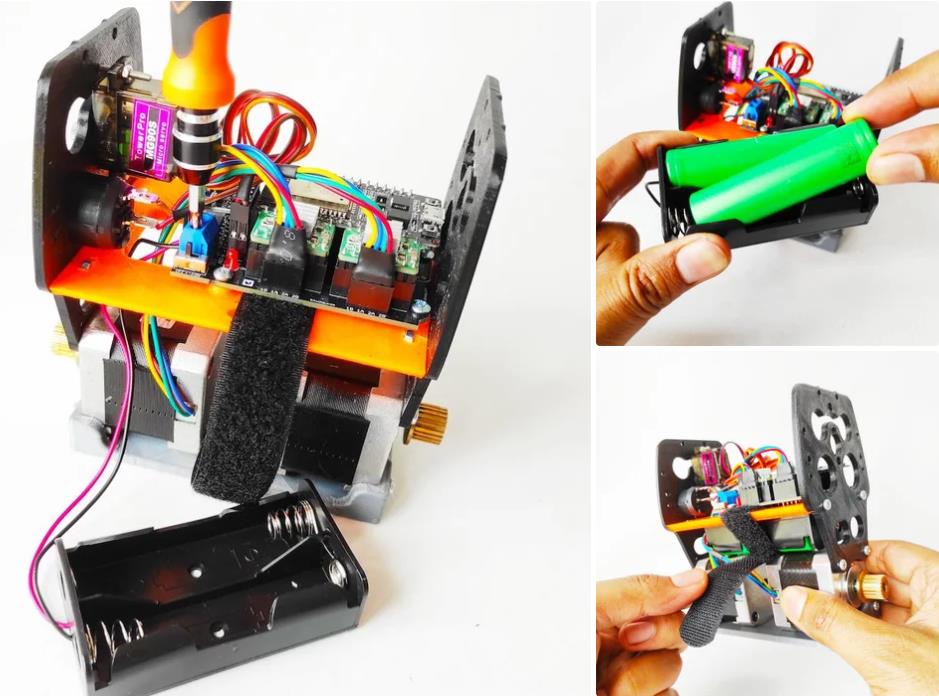
2 x 锂离子电池 18650 3,7V
1 x 电池座 2x 18650
1 x 微型 USB 数据线
1 x OTG 适配器
1 x 端子螺钉 2 针 5mm
2 x 母头 15 针
5 x 母头 8 针
2 x 母头 4 针
1 x 公头 2 针
1 x 公头接头 3 针
1 x 跳线帽
1 x 固定螺钉 5mm
1 x 套装 M3 固定螺钉 10mm
2 x O 形圈 3mm 内径 82mm
1 x 套装 3D 打印零件
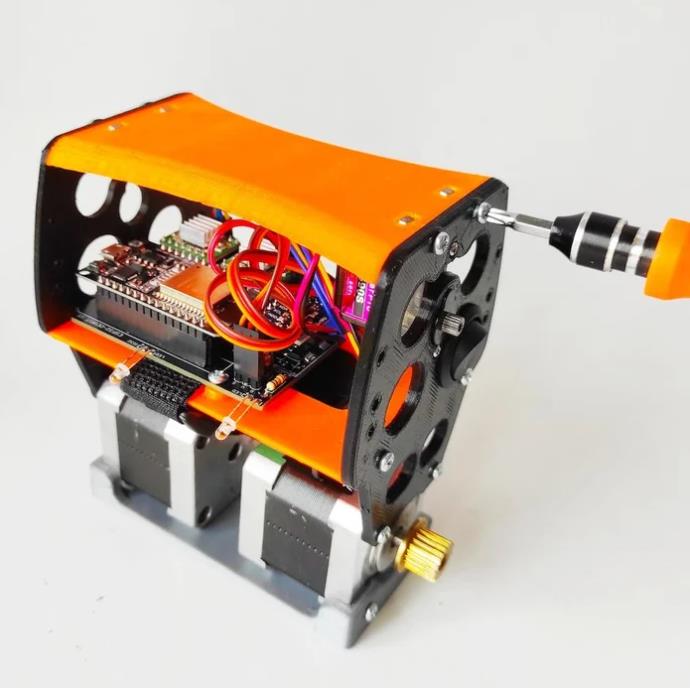
B-robot EVO 2 是一款开源、基于 arduino 的自平衡机器人,具有许多功能(看看下面的描述)现在带有战斗臂和附加组件来与另一个机器人战斗(或在您跌倒时站起来)。
使用智能手机或平板电脑 (WIFI) 进行远程控制。
该机器人是 B-robot ORIGINAL 的自然演变,并使用创建所需的相同电子设备和电机:
空气曲棍球机器人
Sphere-O-Bot (蛋机器人 MOD)
iBoard机器人
PyBot 机械臂
相机滑块机器人
厌倦了一台机器人?创建另一个仅打印 3D 零件!
B-robot EVO 2 是一款基于 Arduino 的机器人。开放的软件和硬件创建。您可以轻松修改其行为,在 Arduino CODE 中或通过 CONTROL APP 实时更改加速度/速度/稳定性参数。
新功能:
通过 GOOGLE PLAY 上的免费应用程序使用智能手机/平板电脑控制它(适用于 Android 或适用于 iOS 设备的 Apple 商店
谷歌块可控!
非常适合在学习机器人技术时获得乐趣(看看机器人挑战!
现在可以使用普通 AA 电池(或 3 芯锂聚合物电池)
二 SERVO 输出(一个用于 ARM)
更易于打印,使用更少的塑料
PRO MODE 可以从您的智能手机/平板电脑激活(提高敏捷性和速度)
增加 WIFI范围(最远40米)
新功能:使用 Thingiverse 定制器创建您自己的保险杠!
新增功能: 用于丁腈 O 形圈的新车轮型号 [V11]
新增功能: 全新 100% 正面和背面 3D 打印保险杠“BUMPER 3D 打印 V1”
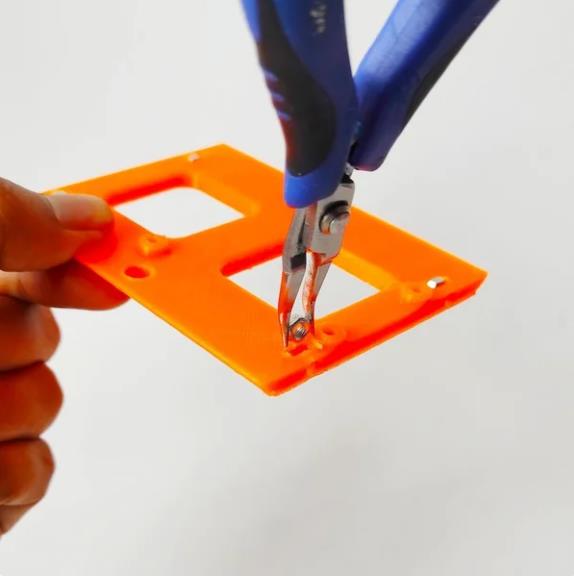
您需要打印的内容:
2x 轮子
2x 集线器
手臂
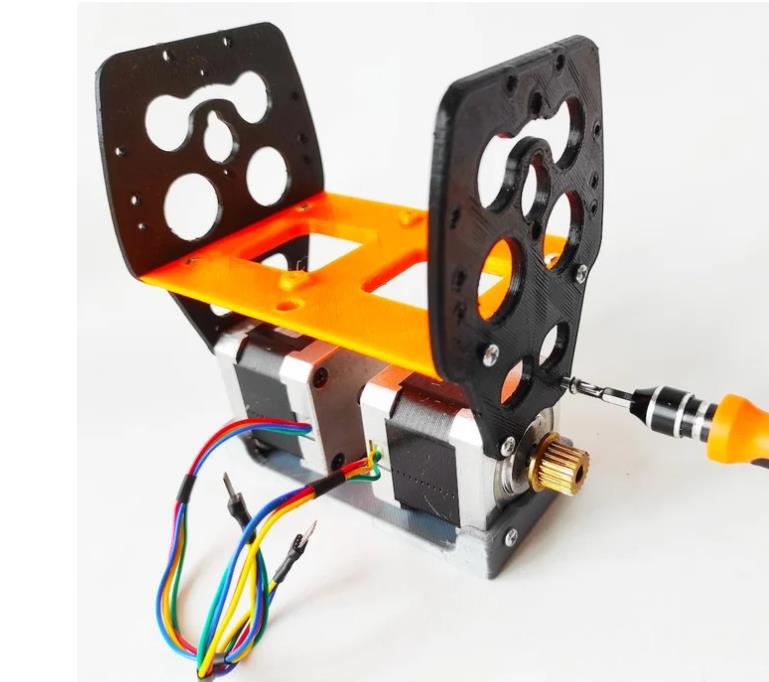
2x 侧面板
顶层货架
电机架
电子货架
2x 保险杠(要创建您的定制保险杠,请点击此链接)
--------------------------------------------------
附加组件:
可选:2x 保险杠(顶部前保险杠)
自选:战斗手臂:雷神之锤
自选:战斗武器:战斧
自选:GoPro 相机支持
自选:汽水罐顶部搁板支撑
自选:O 形圈轮 (x2)






项目代码
/*
* esp32_wifi_balancing_robot.ino
*
* Created on: 23.02.2021
* Author: anonymous
*/
#include <Wire.h>
#include <WiFi.h>
#include <ArduinoOTA.h>
#include <Arduino.h>
#include <AsyncTCP.h>
#include <ESPAsyncWebServer.h>
#include "Control.h"
#include "MPU6050.h"
#include "Motors.h"
#include "defines.h"
#include "globals.h"
#include <stdio.h>
#include "esp_types.h"
#include "soc/timer_group_struct.h"
#include "driver/periph_ctrl.h"
#include "driver/timer.h"
#include "driver/ledc.h"
#include "esp32-hal-ledc.h"
const char* PARAM_FADER1 = "fader1";
const char* PARAM_FADER2 = "fader2";
const char* PARAM_PUSH1 = "push1";
const char* PARAM_PUSH2 = "push2";
const char* PARAM_PUSH3 = "push3";
const char* PARAM_PUSH4 = "push4";
const char* PARAM_TOGGLE1 = "toggle1";
const char* PARAM_FADER3 = "fader3";
const char* PARAM_FADER4 = "fader4";
const char* PARAM_FADER5 = "fader5";
const char* PARAM_FADER6 = "fader6";
/* Wifi Crdentials */
String sta_ssid = "$your_ssid_maximum_32_characters"; // set Wifi network you want to connect to
String sta_password = "$your_pswd_maximum_32_characters"; // set password for Wifi network
unsigned long previousMillis = 0;
AsyncWebServer server(80);
void initMPU6050() {
MPU6050_setup();
delay(500);
MPU6050_calibrate();
}
void initTimers();
void notFound(AsyncWebServerRequest *request) {
request->send(404, "text/plain", "Not found");
}
void setup() {
Serial.begin(115200); // set up seriamonitor at 115200 bps
Serial.setDebugOutput(true);
Serial.println();
Serial.println("*ESP32 Camera Balancing Robot*");
Serial.println("--------------------------------------------------------");
pinMode(PIN_ENABLE_MOTORS, OUTPUT);
digitalWrite(PIN_ENABLE_MOTORS, HIGH);
pinMode(PIN_MOTOR1_DIR, OUTPUT);
pinMode(PIN_MOTOR1_STEP, OUTPUT);
pinMode(PIN_MOTOR2_DIR, OUTPUT);
pinMode(PIN_MOTOR2_STEP, OUTPUT);
pinMode(PIN_SERVO, OUTPUT);
pinMode(PIN_LED, OUTPUT);
digitalWrite(PIN_LED, LOW);
pinMode(PIN_WIFI_LED, OUTPUT);
digitalWrite(PIN_WIFI_LED, LOW);
pinMode(PIN_BUZZER, OUTPUT);
digitalWrite(PIN_BUZZER, LOW);
ledcSetup(6, 50, 16); // channel 6, 50 Hz, 16-bit width
ledcAttachPin(PIN_SERVO, 6); // GPIO 22 assigned to channel 1
delay(50);
ledcWrite(6, SERVO_AUX_NEUTRO);
Wire.begin();
initMPU6050();
// Set NodeMCU Wifi hostname based on chip mac address
char chip_id[15];
snprintf(chip_id, 15, "%04X", (uint16_t)(ESP.getEfuseMac()>>32));
String hostname = "esp32brobot-" + String(chip_id);
Serial.println();
Serial.println("Hostname: "+hostname);
// first, set NodeMCU as STA mode to connect with a Wifi network
WiFi.mode(WIFI_STA);
WiFi.begin(sta_ssid.c_str(), sta_password.c_str());
Serial.println("");
Serial.print("Connecting to: ");
Serial.println(sta_ssid);
Serial.print("Password: ");
Serial.println(sta_password);
// try to connect with Wifi network about 8 seconds
unsigned long currentMillis = millis();
previousMillis = currentMillis;
while (WiFi.status() != WL_CONNECTED && currentMillis - previousMillis <= 8000) {
delay(500);
Serial.print(".");
currentMillis = millis();
}
// if failed to connect with Wifi network set NodeMCU as AP mode
IPAddress myIP;
if (WiFi.status() == WL_CONNECTED) {
Serial.println("");
Serial.println("*WiFi-STA-Mode*");
Serial.print("IP: ");
myIP=WiFi.localIP();
Serial.println(myIP);
digitalWrite(PIN_WIFI_LED, HIGH); // Wifi LED on when connected to Wifi as STA mode
delay(2000);
} else {
WiFi.mode(WIFI_AP);
WiFi.softAP(hostname.c_str());
myIP = WiFi.softAPIP();
Serial.println("");
Serial.println("WiFi failed connected to " + sta_ssid);
Serial.println("");
Serial.println("*WiFi-AP-Mode*");
Serial.print("AP IP address: ");
Serial.println(myIP);
digitalWrite(PIN_WIFI_LED, LOW); // Wifi LED off when status as AP mode
delay(2000);
}
// Send a GET request to <ESP_IP>/?fader=<inputValue>
server.on("/", HTTP_GET, [] (AsyncWebServerRequest *request) {
String inputValue;
String inputMessage;
OSCnewMessage = 1;
// Get value for Forward/Backward
if (request->hasParam(PARAM_FADER1)) {
OSCpage = 1;
inputValue = request->getParam(PARAM_FADER1)->value();
inputMessage = PARAM_FADER1;
OSCfader[0] = inputValue.toFloat();
}
// Get value for Right/Left
else if (request->hasParam(PARAM_FADER2)) {
OSCpage = 1;
inputValue = request->getParam(PARAM_FADER2)->value();
inputMessage = PARAM_FADER2;
OSCfader[1] = inputValue.toFloat();
}
// Get value for Servo0
else if (request->hasParam(PARAM_PUSH1)) {
OSCpage = 1;
inputValue = request->getParam(PARAM_PUSH1)->value();
inputMessage = PARAM_PUSH1;
if(inputValue.equals("1")) OSCpush[0]=1;
else OSCpush[0]=0;
}
// Get value for Setting
else if (request->hasParam(PARAM_PUSH2)) {
OSCpage = 2;
inputValue = request->getParam(PARAM_PUSH2)->value();
inputMessage = PARAM_PUSH2;
if(inputValue.equals("1")) OSCpush[2]=1;
else OSCpush[2]=0;
}
// Get value for Buzzer
else if (request->hasParam(PARAM_PUSH3)) {
inputValue = request->getParam(PARAM_PUSH3)->value();
inputMessage = PARAM_PUSH3;
if(inputValue.equals("1")) {
digitalWrite(PIN_BUZZER, HIGH);
delay(150);
digitalWrite(PIN_BUZZER, LOW);
delay(80);
digitalWrite(PIN_BUZZER, HIGH);
delay(150);
digitalWrite(PIN_BUZZER, LOW);
delay(80);
}
}
// Get value for Led
else if (request->hasParam(PARAM_PUSH4)) {
inputValue = request->getParam(PARAM_PUSH4)->value();
inputMessage = PARAM_PUSH4;
if(inputValue.equals("1")) digitalWrite(PIN_LED, HIGH);
else digitalWrite(PIN_LED, LOW);
}
// Get value for mode PRO
else if (request->hasParam(PARAM_TOGGLE1)) {
OSCpage = 1;
inputValue = request->getParam(PARAM_TOGGLE1)->value();
inputMessage = PARAM_TOGGLE1;
if(inputValue.equals("1")) OSCtoggle[0]=1;
else OSCtoggle[0]=0;
}
// Get value for P-Stability
else if (request->hasParam(PARAM_FADER3)) {
OSCpage = 2;
inputValue = request->getParam(PARAM_FADER3)->value();
inputMessage = PARAM_FADER3;
OSCfader[0] = inputValue.toFloat();
}
// Get value for D-Stability
else if (request->hasParam(PARAM_FADER4)) {
OSCpage = 2;
inputValue = request->getParam(PARAM_FADER4)->value();
inputMessage = PARAM_FADER4;
OSCfader[0] = inputValue.toFloat();
}
// Get value for P-Speed
else if (request->hasParam(PARAM_FADER5)) {
OSCpage = 2;
inputValue = request->getParam(PARAM_FADER5)->value();
inputMessage = PARAM_FADER5;
OSCfader[0] = inputValue.toFloat();
}
// Get value for I-Speed
else if (request->hasParam(PARAM_FADER6)) {
OSCpage = 2;
inputValue = request->getParam(PARAM_FADER6)->value();
inputMessage = PARAM_FADER6;
OSCfader[0] = inputValue.toFloat();
}
else {
inputValue = "No message sent";
}
Serial.println(inputMessage+'='+inputValue);
request->send(200, "text/text", "");
});
server.onNotFound (notFound); // when a client requests an unknown URI (i.e. something other than "/"), call function "handleNotFound"
server.begin(); // actually start the server
initTimers();
// default neutral values
OSCfader[0] = 0.5;
OSCfader[1] = 0.5;
OSCfader[2] = 0.5;
OSCfader[3] = 0.5;
digitalWrite(PIN_ENABLE_MOTORS, LOW);
for (uint8_t k = 0; k < 5; k++) {
setMotorSpeedM1(5);
setMotorSpeedM2(5);
ledcWrite(6, SERVO_AUX_NEUTRO + 250);
delay(200);
setMotorSpeedM1(-5);
setMotorSpeedM2(-5);
ledcWrite(6, SERVO_AUX_NEUTRO - 250);
delay(200);
}
ledcWrite(6, SERVO_AUX_NEUTRO);
ArduinoOTA.begin(); // enable to receive update/upload firmware via Wifi OTA
}
void loop() {
ArduinoOTA.handle();
if (OSCnewMessage) {
OSCnewMessage = 0;
processOSCMsg();
}
timer_value = micros();
if (MPU6050_newData()) {
MPU6050_read_3axis();
dt = (timer_value - timer_old) * 0.000001; // dt in seconds
//Serial.println(timer_value - timer_old);
timer_old = timer_value;
angle_adjusted_Old = angle_adjusted;
// Get new orientation angle from IMU (MPU6050)
float MPU_sensor_angle = MPU6050_getAngle(dt);
angle_adjusted = MPU_sensor_angle + angle_offset;
if ((MPU_sensor_angle > -15) && (MPU_sensor_angle < 15))
angle_adjusted_filtered = angle_adjusted_filtered * 0.99 + MPU_sensor_angle * 0.01;
// We calculate the estimated robot speed:
// Estimated_Speed = angular_velocity_of_stepper_motors(combined) - angular_velocity_of_robot(angle measured by IMU)
actual_robot_speed = (speed_M1 + speed_M2) / 2; // Positive: forward
int16_t angular_velocity = (angle_adjusted - angle_adjusted_Old) * 25.0; // 25 is an empirical extracted factor to adjust for real units
int16_t estimated_speed = -actual_robot_speed + angular_velocity;
estimated_speed_filtered = estimated_speed_filtered * 0.9 + (float) estimated_speed * 0.1; // low pass filter on estimated speed
if (positionControlMode) {
// POSITION CONTROL. INPUT: Target steps for each motor. Output: motors speed
motor1_control = positionPDControl(steps1, target_steps1, Kp_position, Kd_position, speed_M1);
motor2_control = positionPDControl(steps2, target_steps2, Kp_position, Kd_position, speed_M2);
// Convert from motor position control to throttle / steering commands
throttle = (motor1_control + motor2_control) / 2;
throttle = constrain(throttle, -190, 190);
steering = motor2_control - motor1_control;
steering = constrain(steering, -50, 50);
}
// ROBOT SPEED CONTROL: This is a PI controller.
// input:user throttle(robot speed), variable: estimated robot speed, output: target robot angle to get the desired speed
target_angle = speedPIControl(dt, estimated_speed_filtered, throttle, Kp_thr, Ki_thr);
target_angle = constrain(target_angle, -max_target_angle, max_target_angle); // limited output
// Stability control (100Hz loop): This is a PD controller.
// input: robot target angle(from SPEED CONTROL), variable: robot angle, output: Motor speed
// We integrate the output (sumatory), so the output is really the motor acceleration, not motor speed.
control_output += stabilityPDControl(dt, angle_adjusted, target_angle, Kp, Kd);
control_output = constrain(control_output, -MAX_CONTROL_OUTPUT, MAX_CONTROL_OUTPUT); // Limit max output from control
// The steering part from the user is injected directly to the output
motor1 = control_output + steering;
motor2 = control_output - steering;
// Limit max speed (control output)
motor1 = constrain(motor1, -MAX_CONTROL_OUTPUT, MAX_CONTROL_OUTPUT);
motor2 = constrain(motor2, -MAX_CONTROL_OUTPUT, MAX_CONTROL_OUTPUT);
int angle_ready;
if (OSCpush[0]) // If we press the SERVO button we start to move
angle_ready = 82;
else
angle_ready = 74; // Default angle
if ((angle_adjusted < angle_ready) && (angle_adjusted > -angle_ready)) // Is robot ready (upright?)
{
// NORMAL MODE
digitalWrite(PIN_ENABLE_MOTORS, LOW); // Motors enable
// NOW we send the commands to the motors
setMotorSpeedM1(motor1);
setMotorSpeedM2(motor2);
} else // Robot not ready (flat), angle > angle_ready => ROBOT OFF
{
digitalWrite(PIN_ENABLE_MOTORS, HIGH); // Disable motors
setMotorSpeedM1(0);
setMotorSpeedM2(0);
PID_errorSum = 0; // Reset PID I term
Kp = KP_RAISEUP; // CONTROL GAINS FOR RAISE UP
Kd = KD_RAISEUP;
Kp_thr = KP_THROTTLE_RAISEUP;
Ki_thr = KI_THROTTLE_RAISEUP;
// RESET steps
steps1 = 0;
steps2 = 0;
positionControlMode = false;
OSCmove_mode = false;
throttle = 0;
steering = 0;
}
// Push1 Move servo arm
if (OSCpush[0]) {
if (angle_adjusted > -40)
ledcWrite(6, SERVO_MAX_PULSEWIDTH);
else
ledcWrite(6, SERVO_MIN_PULSEWIDTH);
} else
ledcWrite(6, SERVO_AUX_NEUTRO);
// Servo2
//ledcWrite(6, SERVO2_NEUTRO + (OSCfader[2] - 0.5) * SERVO2_RANGE);
// Normal condition?
if ((angle_adjusted < 56) && (angle_adjusted > -56)) {
Kp = Kp_user; // Default user control gains
Kd = Kd_user;
Kp_thr = Kp_thr_user;
Ki_thr = Ki_thr_user;
} else // We are in the raise up procedure => we use special control parameters
{
Kp = KP_RAISEUP; // CONTROL GAINS FOR RAISE UP
Kd = KD_RAISEUP;
Kp_thr = KP_THROTTLE_RAISEUP;
Ki_thr = KI_THROTTLE_RAISEUP;
}
} // End of new IMU data
}
void processOSCMsg() {
if (OSCpage == 1) {
if (modifing_control_parameters) // We came from the settings screen
{
OSCfader[0] = 0.5; // default neutral values
OSCfader[1] = 0.5; // default neutral values
OSCtoggle[0] = 0; // Normal mode
mode = 0;
modifing_control_parameters = false;
}
if (OSCmove_mode) {
Serial.print("M ");
Serial.print(OSCmove_speed);
Serial.print(" ");
Serial.print(OSCmove_steps1);
Serial.print(",");
Serial.println(OSCmove_steps2);
positionControlMode = true;
OSCmove_mode = false;
target_steps1 = steps1 + OSCmove_steps1;
target_steps2 = steps2 + OSCmove_steps2;
} else {
positionControlMode = false;
throttle = (OSCfader[0] - 0.5) * max_throttle;
// We add some exponential on steering to smooth the center band
steering = OSCfader[1] - 0.5;
if (steering > 0)
steering = (steering * steering + 0.5 * steering) * max_steering;
else
steering = (-steering * steering + 0.5 * steering) * max_steering;
}
if ((mode == 0) && (OSCtoggle[0])) {
// Change to PRO mode
max_throttle = MAX_THROTTLE_PRO;
max_steering = MAX_STEERING_PRO;
max_target_angle = MAX_TARGET_ANGLE_PRO;
mode = 1;
}
if ((mode == 1) && (OSCtoggle[0] == 0)) {
// Change to NORMAL mode
max_throttle = MAX_THROTTLE;
max_steering = MAX_STEERING;
max_target_angle = MAX_TARGET_ANGLE;
mode = 0;
}
} else if (OSCpage == 2) { // OSC page 2
if (!modifing_control_parameters) {
for (uint8_t i = 0; i < 4; i++)
OSCfader[i] = 0.5;
OSCtoggle[0] = 0;
modifing_control_parameters = true;
//OSC_MsgSend("$P2", 4);
}
// User could adjust KP, KD, KP_THROTTLE and KI_THROTTLE (fadder3,4,5,6)
// Now we need to adjust all the parameters all the times because we dont know what parameter has been moved
Kp_user = KP * 2 * OSCfader[0];
Kd_user = KD * 2 * OSCfader[1];
Kp_thr_user = KP_THROTTLE * 2 * OSCfader[2];
Ki_thr_user = KI_THROTTLE * 2 * OSCfader[3];
// Send a special telemetry message with the new parameters
char auxS[50];
sprintf(auxS, "$tP,%d,%d,%d,%d", int(Kp_user * 1000), int(Kd_user * 1000), int(Kp_thr_user * 1000), int(Ki_thr_user * 1000));
//OSC_MsgSend(auxS, 50);
// Calibration mode??
if (OSCpush[2] == 1) {
Serial.print("Calibration MODE ");
angle_offset = angle_adjusted_filtered;
Serial.println(angle_offset);
}
// Kill robot => Sleep
while (OSCtoggle[0] == 1) {
//Reset external parameters
PID_errorSum = 0;
timer_old = millis();
setMotorSpeedM1(0);
setMotorSpeedM2(0);
digitalWrite(PIN_ENABLE_MOTORS, HIGH); // Disable motors
}
}
}【Arduino 动手做】DIY ESP32 Wifi 自平衡机器人 - B-Robot ESP32 Arduino 编程
项目链接:https://www.instructables.com/DIY-ESP32-Wifi-Self-Balancing-Robot-B-Robot-ESP32-/
项目作者:bluino_electronics
参考资料:https://blogdaichan.hatenablog.com/entry/%3Fp%3D7129
项目视频:https://www.youtube.com/watch?v=tZynIj1StpM
项目代码:https://github.com/bluino/esp32_wifi_balancing_robot
3D打印文件:https://www.thingiverse.com/thing:2306541
PCB项目链接:https://www.pcbway.com/project/shareproject/ESP32_Balancing_Robot_Shield.html
Android 应用程序:https://play.google.com/store/apps/details?id=com.bluino.esp32wifibalancingrobot




 他的勋章
他的勋章

评论