 返回首页
返回首页
 回到顶部
回到顶部

【项目由来】
垃圾分类在上海已经实行了很多年,但是我们会经常在马路上看到垃圾箱溢出的现象,特别是在一些旅游景区,给游客带来一些不好的旅游体验。

如何提醒游客看到已满的垃圾桶不要再扔?有时候垃圾桶之间间距又很远,如何有效引导游客合理扔垃圾?有了垃圾分类的意识,而如何扔好垃圾又成了现在智慧城市亟需解决的问题。
【解决方案】
身边正好有掌控板和超声波传感器,尝试使用简单的硬件搭建,设计一个具有提示功能的智能垃圾桶。如果垃圾桶已接近饱和状态,掌控板led灯显示红色同时发出提示声音,通过siot物联网服务功能给垃圾管理中心发出清理提示信息,同时在oled屏幕上显示附近空闲的垃圾筒,以便游客扔垃圾。
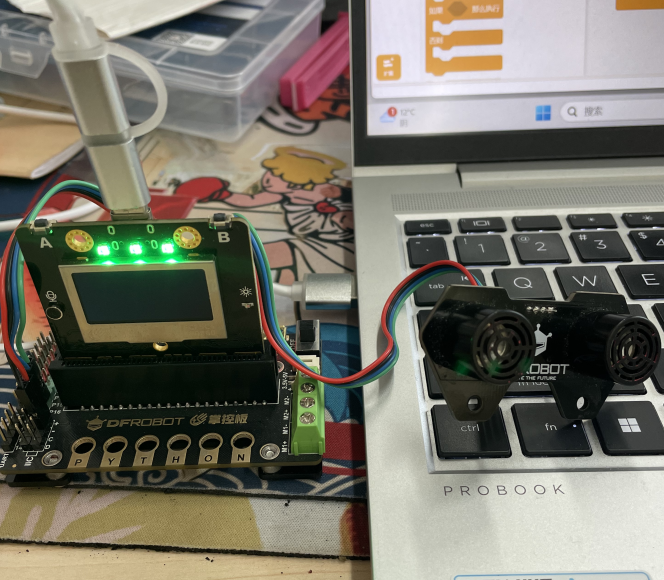
【制作原型】
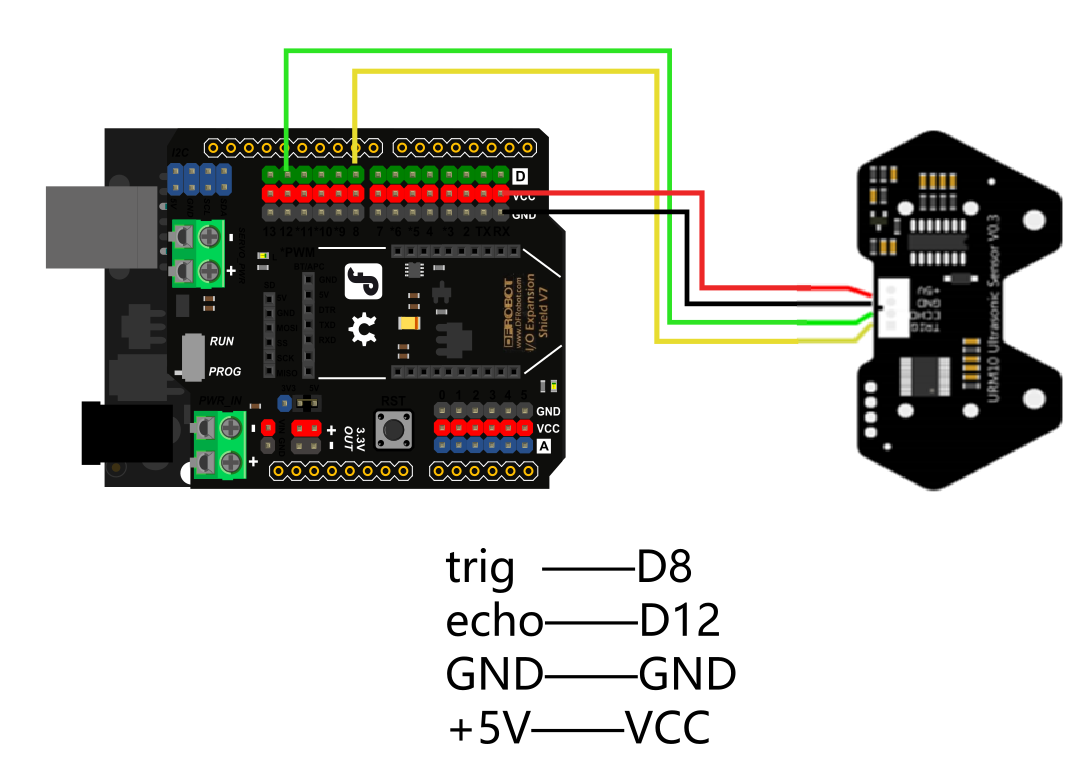
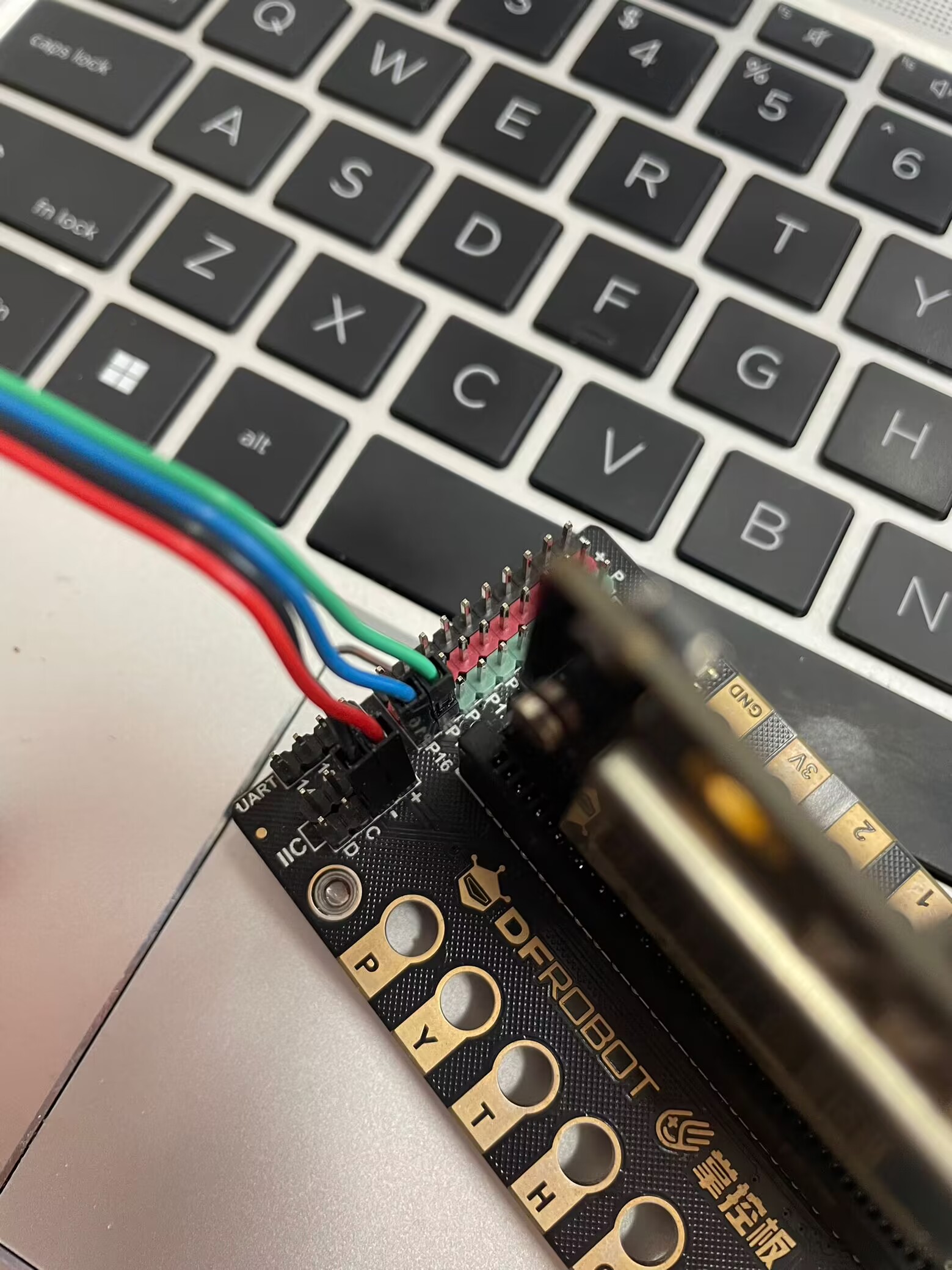
掌控板接在扩展板上,超声波传感器利用4P线接在扩展板上(P15 P16),掌控板通过数据线与计算机连接。
根据产品wiki说明:超声波模块的探测距离为5cm-300cm。
管脚定义
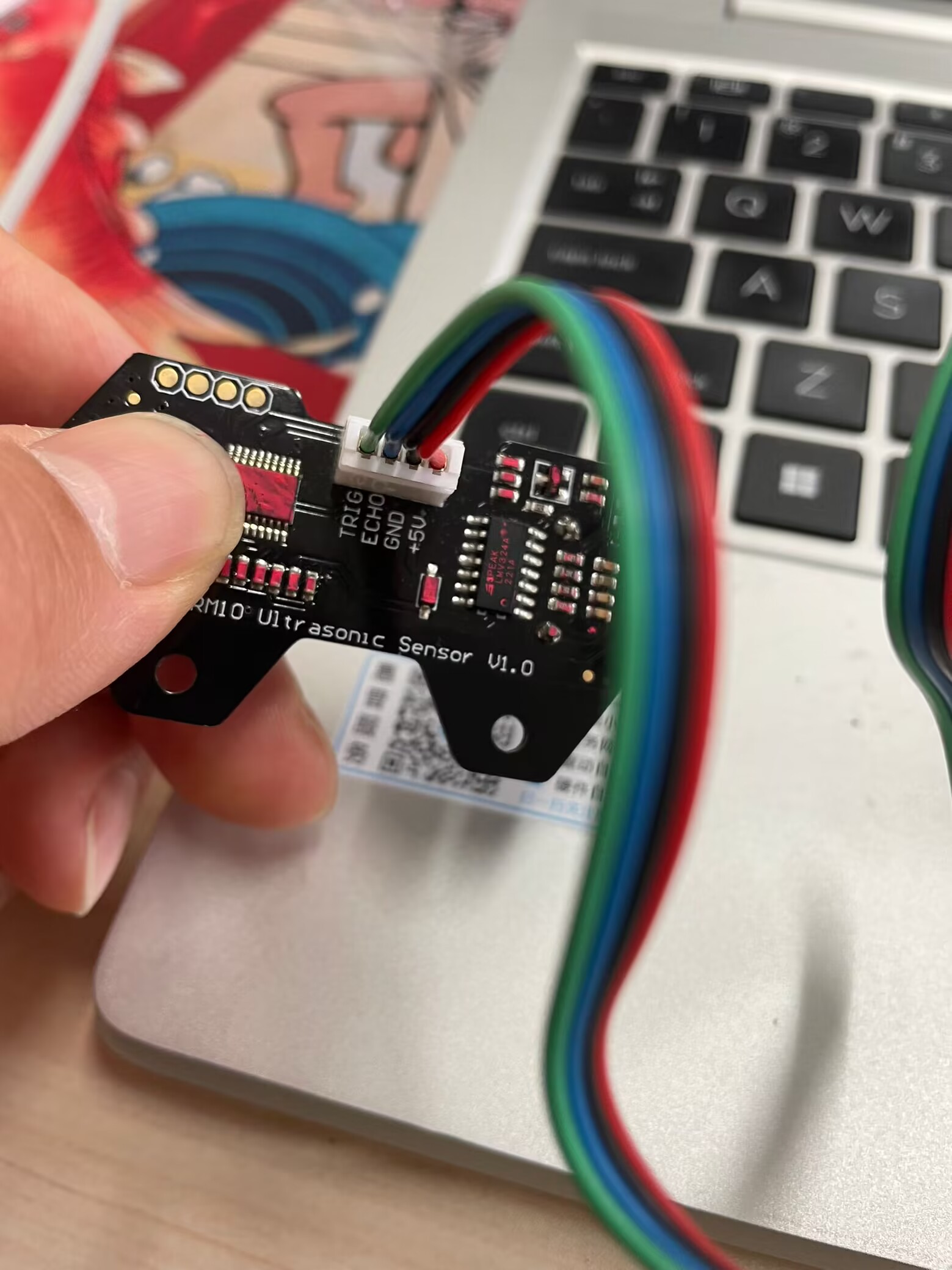
trig: 发送管脚echo:接收管脚GND:接地Vcc:电源管脚
电子接线图:
实际连线图
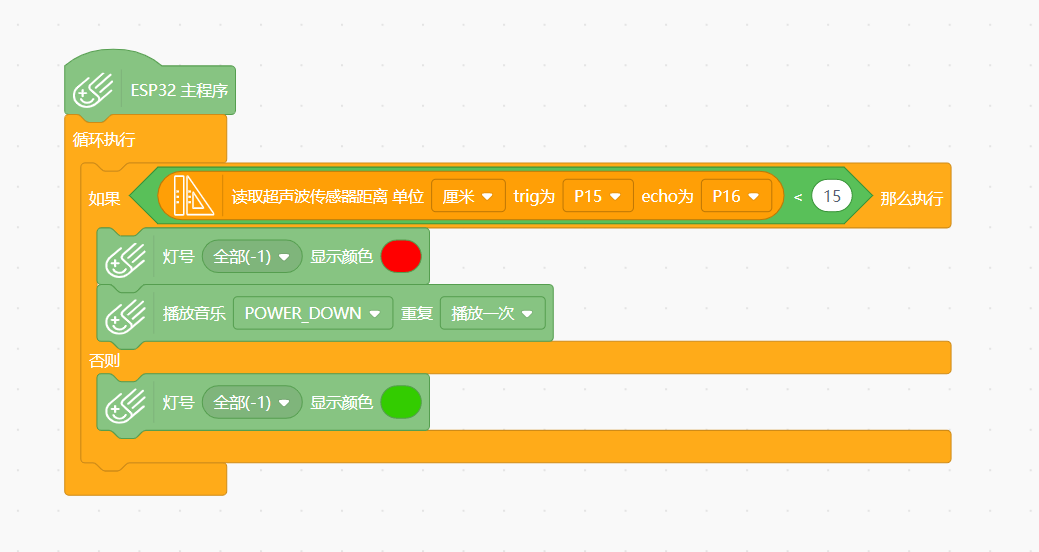
程序代码截图如下:
打开siot启动文件

根据ip进行登录网页端
密码:dfrobot
新建主题:智能垃圾桶

通过物联数据对垃圾数据进行追踪与管理,也可以利用可视化面板进行数据显示。
【测试】
进行实时测试,查看效果。

利用实时模式进行数据可视化显示:

【项目总结】
本内容为1.0版本,目前只涉及超声波传感器。后续将加入更多传感器与掌控板,通过物联网互联的方式进行广播通信,使得智能垃圾桶更智能,达到帮助游客合理、有效扔垃圾的功能。同时利用可视化大屏,数据得到有效呈现,通过数据分析帮助管理人员更有效、更合理的安排工作时间,以达到信息化精细化管理的目的!
【本文参考内容】DFROBOT Urm10超声波 产品资料 使用教程
/*!
* MindPlus
* mpython
*
*/
#include <MPython.h>
#include <DFRobot_URM10.h>
// 创建对象
DFRobot_URM10 urm10;
// 主程序开始
void setup() {
mPython.begin();
}
void loop() {
if (((urm10.getDistanceCM(P15, P16))<15)) {
rgb.write(-1, 0xFF0000);
display.setCursor(42, 22);
display.print("垃圾箱已满");
buzz.play(WAWAWAWAA, Once);
}
else {
rgb.write(-1, 0x00FF00);
display.fillScreen(0);
}
}
附件



 他的勋章
他的勋章







cd6df6vf2024.12.23
求智能垃圾桶全代码
DeadWalking2024.12.31
在附件里有哦
花生编程2024.04.21
赞赞赞
花生编程2024.04.21
厉害
三春牛-创客2024.04.21
666
三春牛-创客2024.04.21
厉害
伦**2024.04.19
666
DeadWalking2024.04.20
谢谢,一起学习!
实践起来20242024.04.17
这个设计好!
DeadWalking2024.04.20
谢谢军军!