 返回首页
返回首页
 回到顶部
回到顶部
我一直想制作一个属于自己的四足机器人,而 Minecraft 比赛是一个很好的借口。此外,我真的很想要一只爬行者的“宠物”。
在这个 Instructable 中,我将分享我是如何制作的,如果您想制作自己的,我会给你一个指南。
我假设您有一些电子产品的经验,但如果您有任何问题,请随时在评论中提问,我会尽力回答。
学分:
使用 Arduino 读取 RC 接收器:https://ryanboland.com/blog/reading-rc-receiver-va...
PCA9685教程:http://www.naylampmechatronics.com/blog/41_Tutoria...
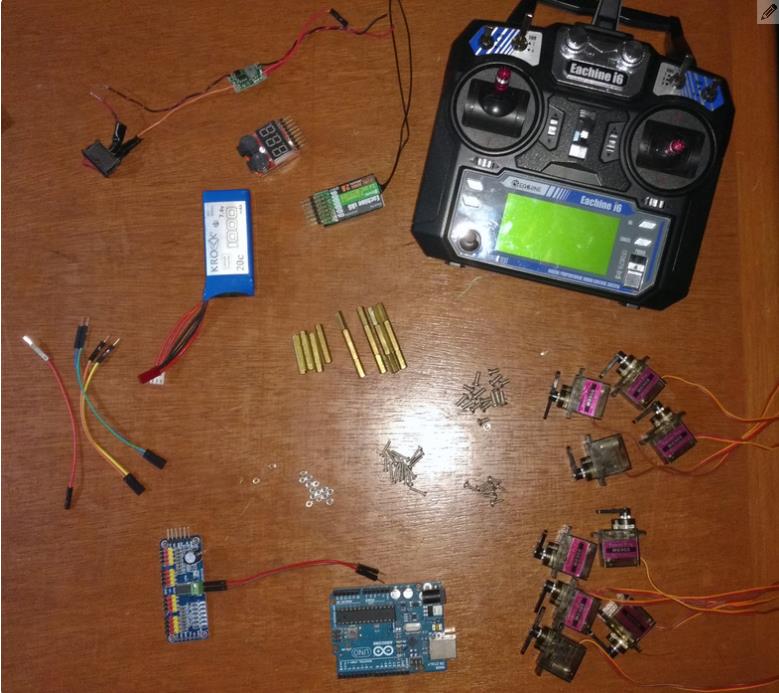
材料
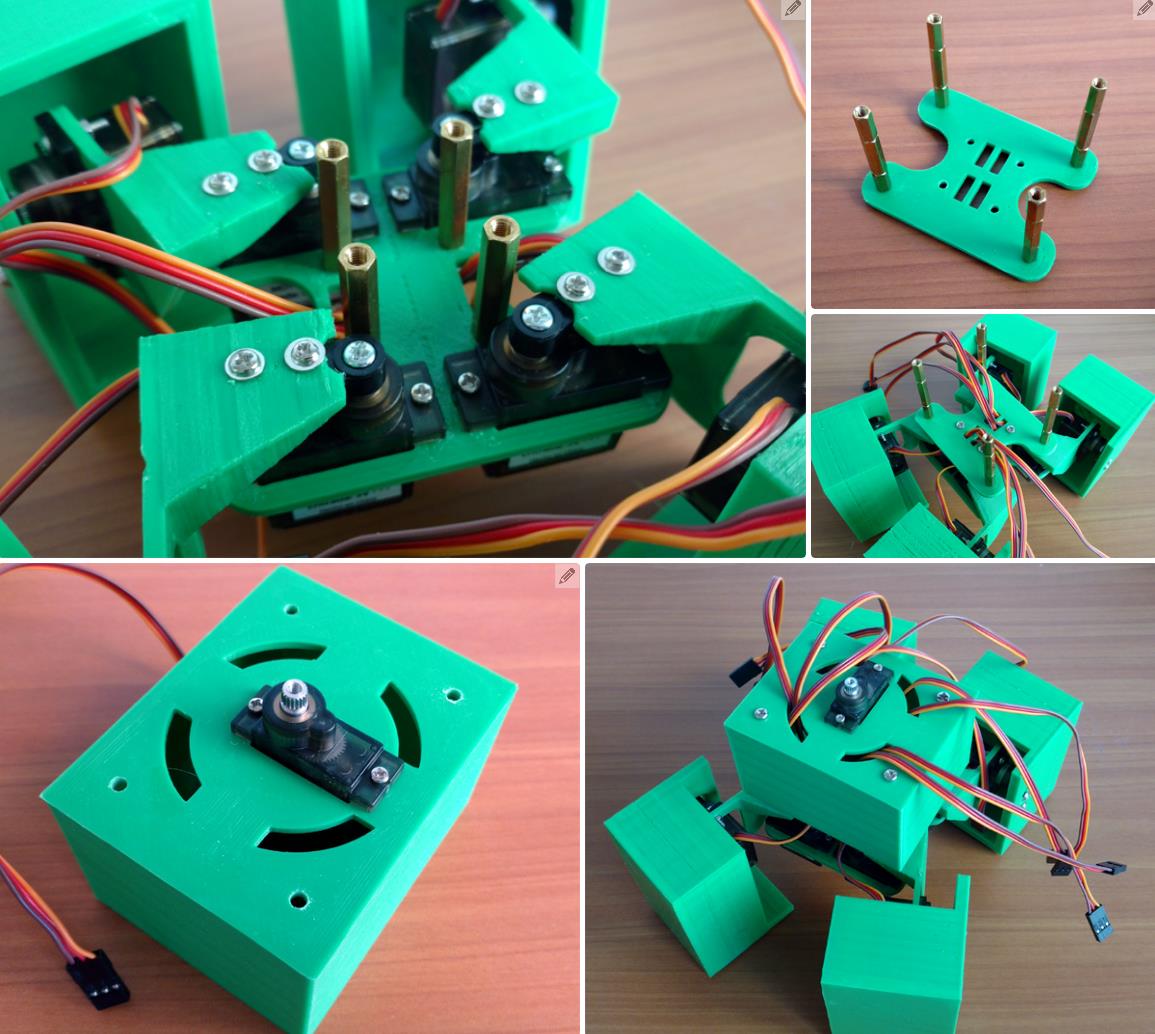
9 个 MG90S 舵机
18 个 M2 螺母和螺栓
8 个 M3 螺栓
4 个 45 毫米 M3 支座
4 个 25 毫米 M3 支座
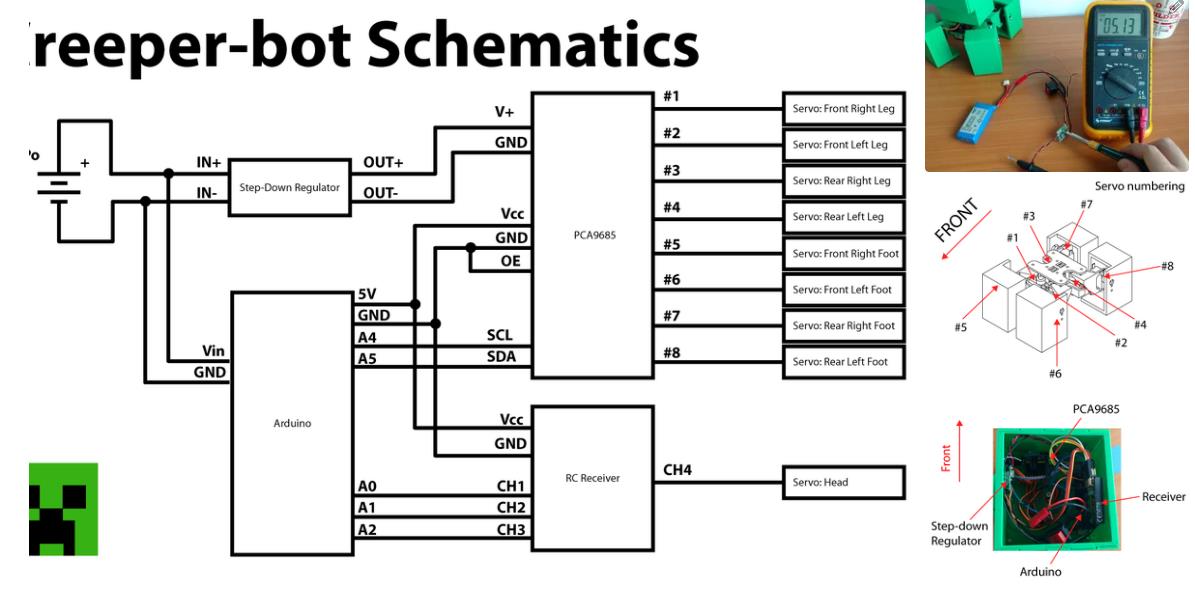
1 个 Arduino UNO
1x PCA9685伺服控制器
1 节电池(我使用了 2 节 7.4V 1000mAh 20C LiPo)
自选:防止过度放电的电池监视器
1 个降压稳压器
可选:用于断开电池与稳压器的开关
1 个 RC 接收器和控制器(我使用了 Eachine iA6 Rx 和 Eachine i6 Tx)
跳线 (M-M, M-F)
强力胶将一些 3D 部件粘合在一起
魔术贴和防滑贴纸。我用了一些我从超市买来的 3M 品牌。
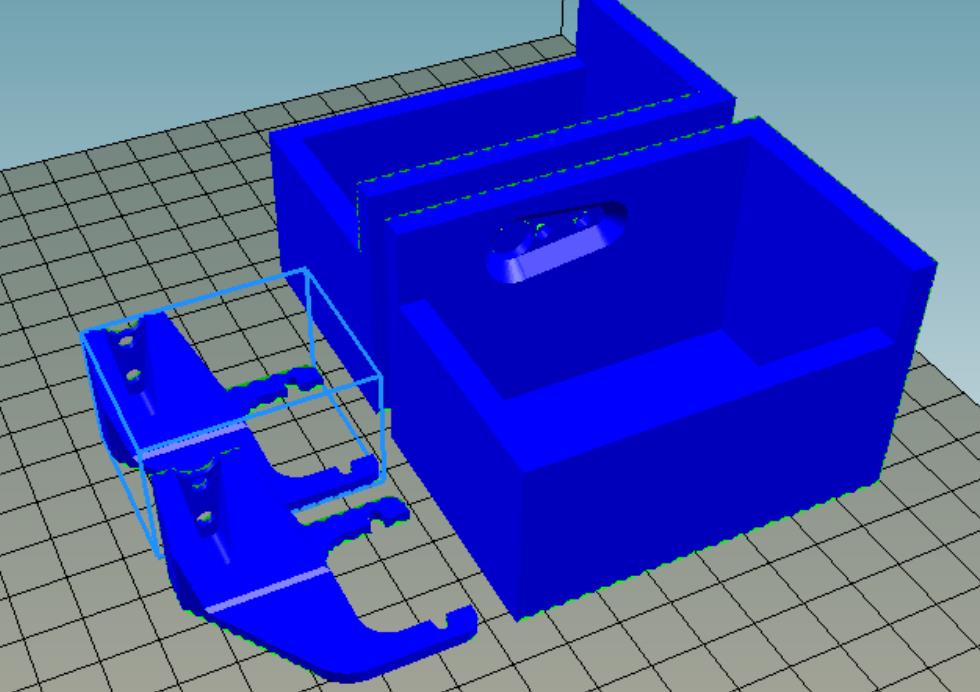
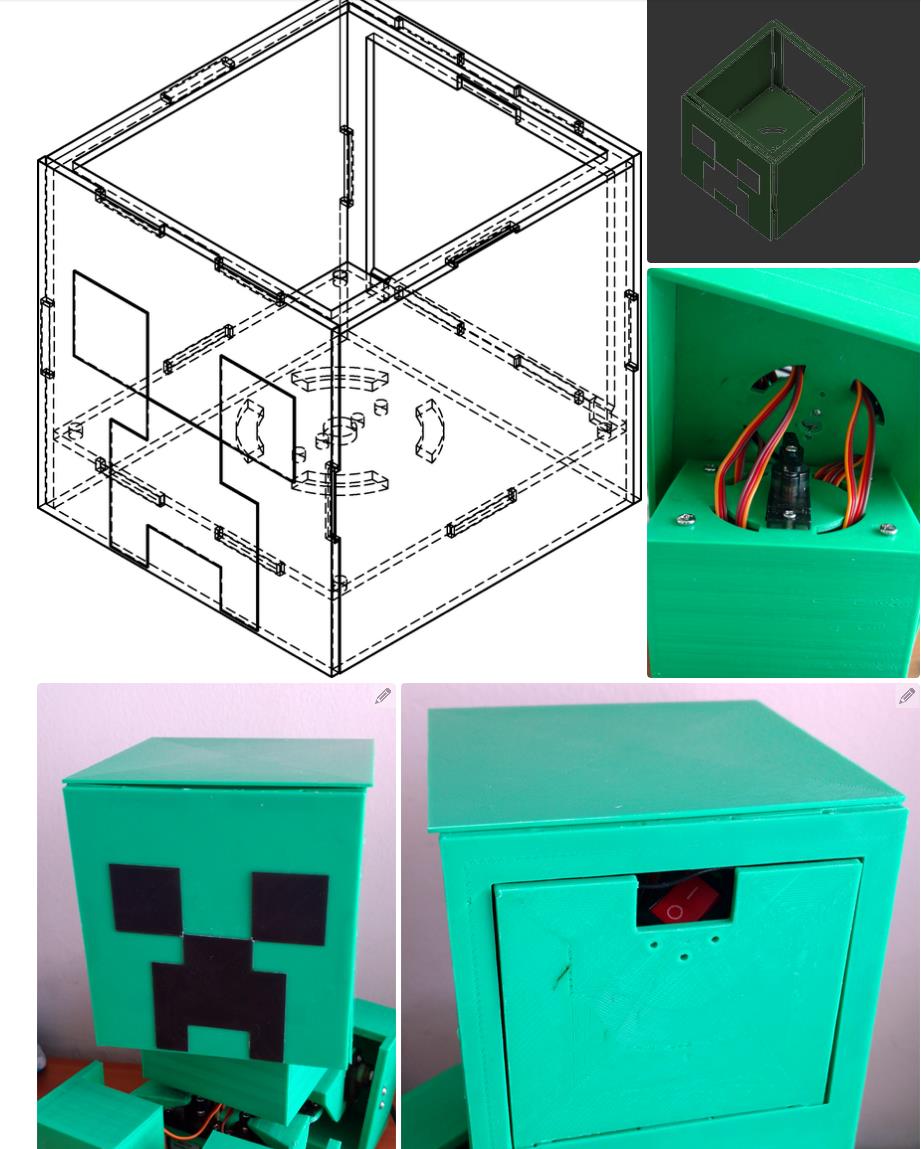
您还需要一些绿色细丝来打印其余部分,还需要一点黑色细丝用于面部。
工具
您需要一把螺丝刀来装所有的螺丝。用于校准稳压器的电压表。
您还需要一个烙铁和一点焊料。
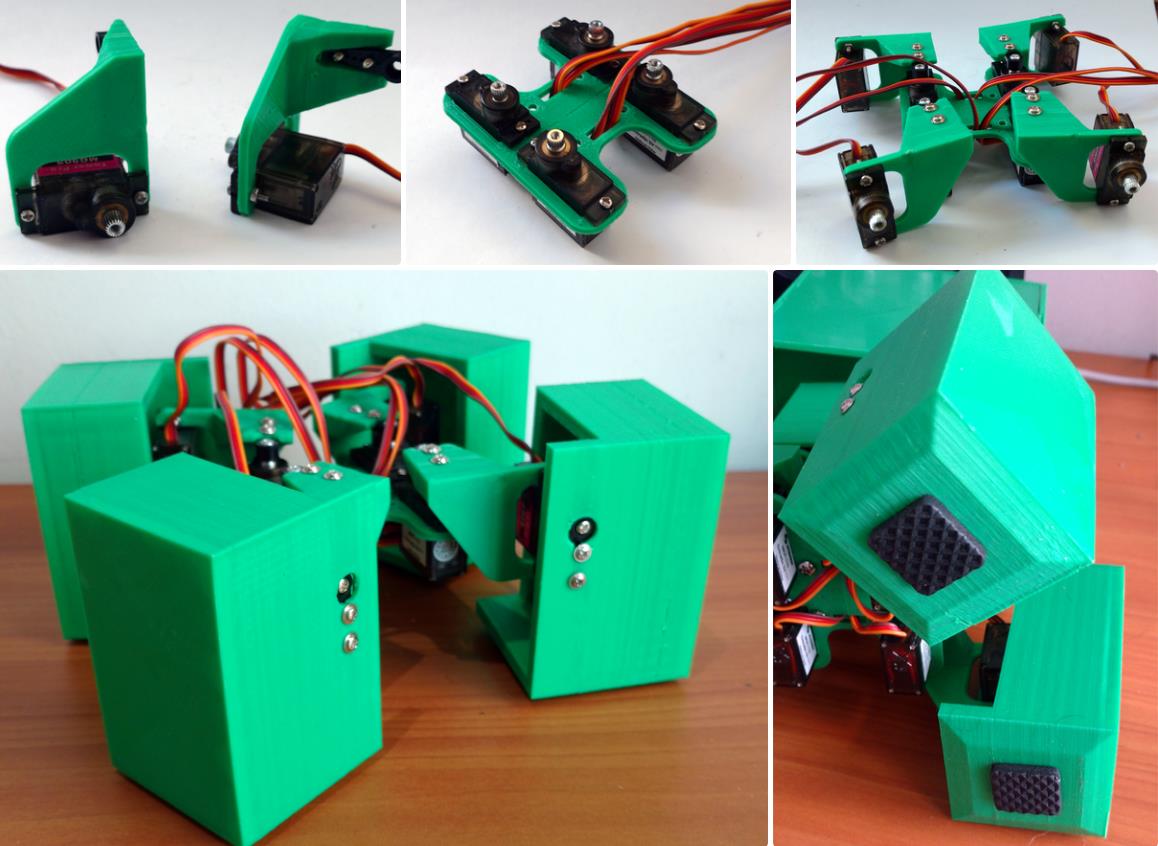
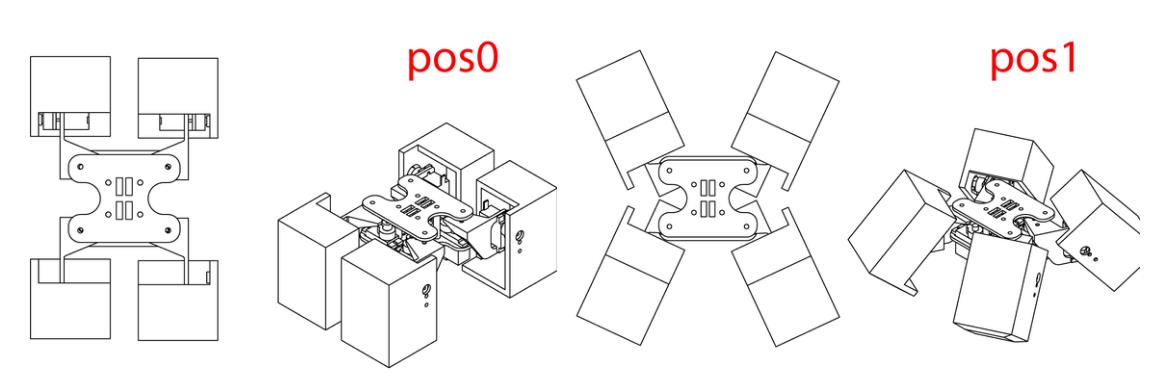
爬行器的运动只需要每个舵机两个不同的位置。我们现在校准这两个位置。
将 calibrate_creeper 脚本(见附件)上传到 Arduino 并打开 Serial Monitor。
您将按照每张图片中所示手动定位机器人,并记下每张机器人的伺服值。
要使用脚本移动伺服器,请使用键 Q/A、W/S、E/D。
要更改要移动的伺服器,请使用 Z/X 键。
要显示当前伺服值,请使用任何其他字母,例如 L。
将 servos 移动到正确的位置后,记下值并更新代码中的 pos0 和 pos1 数组。
更新数组后,您可以将代码重新上传到板中,并使用 5-9 键预览步行步态。
【Arduino 动手做】Creeper-BOT:爬行者宠物机器人
项目链接:https://www.instructables.com/Creeper-BOT-Creeper-Pet/
项目作者:FedericoM61
项目视频 :https://www.youtube.com/watch?v=1PDz-G2ahRc
项目代码:
https://content.instructables.com/FPI/0PP4/JDOUPAMZ/FPI0PP4JDOUPAMZ.ino
https://content.instructables.com/F43/O826/JDKKEG4D/F43O826JDKKEG4D.ino
3D 文件:https://content.instructables.com/F70/S3JA/JDOUPS6T/F70S3JAJDOUPS6T.zip



 他的勋章
他的勋章

评论