 返回首页
返回首页
 回到顶部
回到顶部
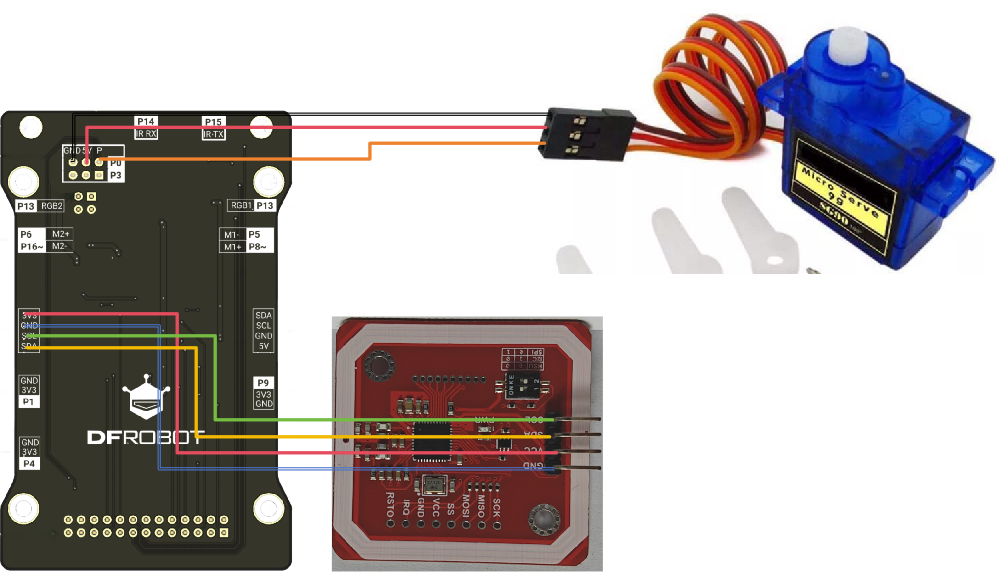
行空板M10有了自己专属的扩展板了,还自带电池,可以离线运行程序,真是太棒了。看看下面这张图,左边M10,右边扩展板,多了两个舵机接口P0和P3,接口那里,靠边的是P0,靠里面的是P3,这里需要注意一下。

接线图

代码
# -*- coding: UTF-8 -*-
# MindPlus
# Python
import time
from unihiker import GUI
from pinpong.board import Servo
from pinpong.board import Board
from pinpong.board import Board,Pin
from pinpong.extension.unihiker import *
from pinpong.libs.dfrobot_pn532 import PN532_I2C
Board().begin()
u_gui=GUI()
servo1 = Servo(Pin((Pin.P0)))
p_pn532 = PN532_I2C()
p_pn532.begin()
while True:
while not (p_pn532.scan()):
pass
time.sleep(0.5)
rfid=u_gui.draw_text(text=p_pn532.read_uid(),x=10,y=60,font_size=20, color="#0000FF")
rfid.config(origin="left")
if p_pn532.scan("5cd65549"):
rfid.remove()
ScanRfid=u_gui.draw_text(text="欢迎回家!",x=10,y=60,font_size=20, color="#00FF00")
# 开门
servo1.write_angle(0)
time.sleep(2)
# 关门
servo1.write_angle(150)
time.sleep(2)
ScanRfid.config(origin="left")
time.sleep(2)
ScanRfid.remove()
else:
rfid.remove()
ScanRfid=u_gui.draw_text(text="无效卡,请联系管理员。",x=10,y=60,font_size=15, color="#FF0000")
ScanRfid.config(origin="left")
time.sleep(2)
ScanRfid.remove()

 他的勋章
他的勋章




评论