 返回首页
返回首页
 回到顶部
回到顶部
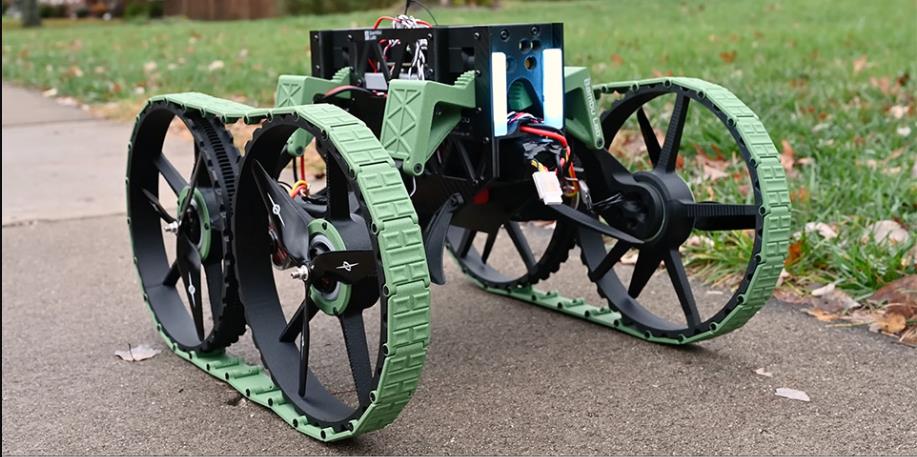
发明家迈克尔·雷希廷打造了一款真实的变形金刚机器人,它不仅可以像无人机一样飞行,还能在道路上行驶。这款机器人的3D打印螺旋桨护罩兼作轮子,轻巧的履带使其能够穿越各种地形。两台低速无刷电机安装在每对车轮之间,通过与驱动履带的相同齿直接啮合的链轮驱动系统。它是如何从行驶状态过渡到飞行状态的?一个平行四边形安装的四连杆机构,其底部有一个线性执行器作为缩回的杆,将车轮/螺旋桨护罩旋转至垂直位置。
“ 我喜欢这个概念,真希望有更多类似的商业方案。能够让无人机着陆并保持其飞行能力,这将是一项巨大的成就。你可以像PeterScripol的遥控坦克一样,把它绑在迷你飞行器上,然后用伺服臂回收其他坠毁的迷你飞行器。你可以用它来着陆并检查排水管、隧道或其他狭窄的入口,这在勘测、研究和侦察方面非常有用,”一位评论者说道。

能够根据运行环境改变形状和形态的车辆一直以来都吸引着科技爱好者的目光,而制造这样一架车辆也一直是许多创客的梦想。现在,[Michael Rechtin] 的 3D 打印四轴飞行器让这个梦想更容易实现,它可以无缝转换为履带式地面车辆。
该设计解决了一个关键的工程难题:大多数多模式飞行器都难以应对飞行和驾驶所需的巨大转速差异。[Michael] 的解决方案是使用打印的螺旋桨护罩作为车轮,并搭配轻质履带。每对车轮之间额外安装一对低速无刷电机,通过与驱动履带的齿直接啮合的链轮驱动系统。
这种神奇的过渡是通过一个平行四边形结构的四连杆机构实现的,线性执行器充当底部连杆。要从飞行状态切换到驾驶状态,线性执行器会缩回,将轮子/螺旋桨护罩旋转到垂直位置。然后,伺服器会旋转顶部连杆,将机身抬离地面。虽然这种方法会增加一些重量——对于多功能机器来说,这是不可避免的妥协——但它不失为一个实用的解决方案。
为该变压器供电的是运行dRehmFlight 的Teensy 4.0 飞行控制器,dRehmFlight 是一个可破解的飞行稳定套件,我们已看到它成功适用于从垂直起降飞机到主动稳定水翼船的所有物体。

构建变形无人机的分步指南:
步骤 1:定义项目
1. 概念化混合设计:• 决定一种可以在坦克和四轴飞行器模式之间无缝切换的双模式车辆。• 优先考虑强大的驾驶能力和平稳的飞行转换过程。
2. 设定目标:• 设计一种重量轻但耐用的车辆,在两种模式下都具有出色的机动性。
步骤 2:初步设计和原型制作
1. 使用 CAD 软件:• 利用 Onshape 等软件创建详细的 3D 模型。• 专注于基本设计特征,例如变换连杆系统、伺服器位置和电机对准。
2. 对连杆系统进行原型制作:• 设计和测试将车辆从坦克模式转换为四轴飞行器模式的机制。• 从简化的 2D 模型开始改进运动和对齐。
3. 迭代和改进:• 根据功能和测试结果根据需要修改设计。
步骤 3:3D 打印组件
1. 选择打印机和材料:• 使用高质量打印机,例如 Bambu Lab X1 Carbon 或 P1S。• 对于结构部件:• 碳纤维尼龙,提高强度和耐用性。• PLA 用于不太重要的部件,以减轻重量。
2. 优化强度和重量:• 通过增加填充和增加额外周长来加固 PLA 部件。• 如果需要,使用更轻的材料重新打印较重的部件。
步骤 4:制造非 3D 打印部件
1. 切割结构部件:• 使用 3 毫米碳纤维板作为关键侧板。• 使用 CNC 路由器切出减轻重量的图案和安装孔。
步骤 5:组装组件
1. 组装连杆系统:• 安装伺服外壳以使身体能够运动。• 加入轴承以确保手臂关节平稳• 使用主控制板(例如,带有 Dreamflight 固件的 TT 4.0)进行协调。 • 使用自定义 PCB 组织布线以获得干净的设置。
2. 安装坦克履带: • 将 3D 打印的履带固定在车轮周围,以确保可靠的牵引力。
步骤 6:测试和故障排除
1. 验证转换机制: • 测试伺服运动以确保平稳过渡。 • 进行调整以防止零件碰撞或卡住。
2.评估驾驶和飞行: • 测试地面性能的稳定性和速度。 • 评估四轴飞行器模式的升力和控制。
步骤 7:减轻重量
1. 减轻组件重量: • 用碳纤维尼龙版本替换较重的部件。 • 考虑在低速部分使用 3D 打印的滚柱轴承。
步骤 8:执行最终测试
1. 进行过渡测试: • 确保坦克和四轴飞行器模式之间的无缝切换。
2. 模拟真实场景
步骤 9:微调设计
1.增强飞行和驾驶性能:• 优化控制算法,提升操控性。• 减轻整体重量,提升效率。
第十步:分享构建过程
1. 记录并发布:• 分享构建过程,包括 CAD 文件和设计说明,以激发他人灵感。
2. 收集反馈:• 根据社区反馈,探索进一步的改进,例如增加续航里程或提升有效载荷能力。

硬件(附属链接):
线性执行器: https ://amzn.to/3ADCbcM
伺服: https ://amzn.to/4fw7RjC
EMAX 2812 电机: https://emax-usa.com/collections/28xx...
5010 电机: https ://amzn.to/4fnkPjt
RadioMaster Pocket: https: //amzn.to/3CrXxuc
Teensy 4.0: https: //amzn.to/3AS2CeJ
MPU6050: https://amzn.to/4fqPmNp

附录
项目视频:https://www.youtube.com/watch?v=f1GSzysrYtw
项目作者:迈克尔·雷希廷[Michael Rechtin]
(我是一名全职航空航天工程师,闲暇时总是忙着做项目,涉及 3D 打印、电子产品、遥控飞机、汽车等等!)
项目介绍:https://hackaday.com/2024/11/22/transforming-drone-drives-and-flies/
https://www.techeblog.com/real-transformers-robot-drone-drive/
项目代码:https://github.com/MichaelRechtin/Transforming-Quadcopter
3D 文件:https://makerworld.com/en/models/785654-transforming-quadcopter#profileId-723196
Onshape 帐户: https: //Onshape.pro/MichaelRechtin



 他的勋章
他的勋章


评论