 返回首页
返回首页
 回到顶部
回到顶部

6.3 晴 周二
帅气的仰望小车,这一次用我做的方向盘遥控器来控制它。

目标任务:
用UDP通信方式连接M10和掌控板,编写程序用多功能方向盘遥控器来控制M10仰望小车。
(提示:经过尝试,UDP传输的是文本消息,在程序中要把文本和数字转化,遥控器客户端要向服务器M10不停歇的传输大量的文本消息,M10运算起来有点吃力,所以动作延迟相当大,所以这个方向盘遥控器功能无法全部实现,所以放弃了油门功能,只保留了方向舵机调节,D档单一速度前进,R档单一速度后退,P档,刹车功能。)
曾经,我也体会到UDP没有无线广播高效,但是小信息量的传递UDP也是可以胜任的,这个帖子,记录一下这个感受吧。
UDP在使用时要先开服务器,再开客户端。
(再次说明,小白,不专业,有错误,欢迎指导)

材料清单
- 仰望小车M10版 X1
- 掌控遥控器 X1
步骤1 仰望小车M10版程序
小车转向机构搭建参考:
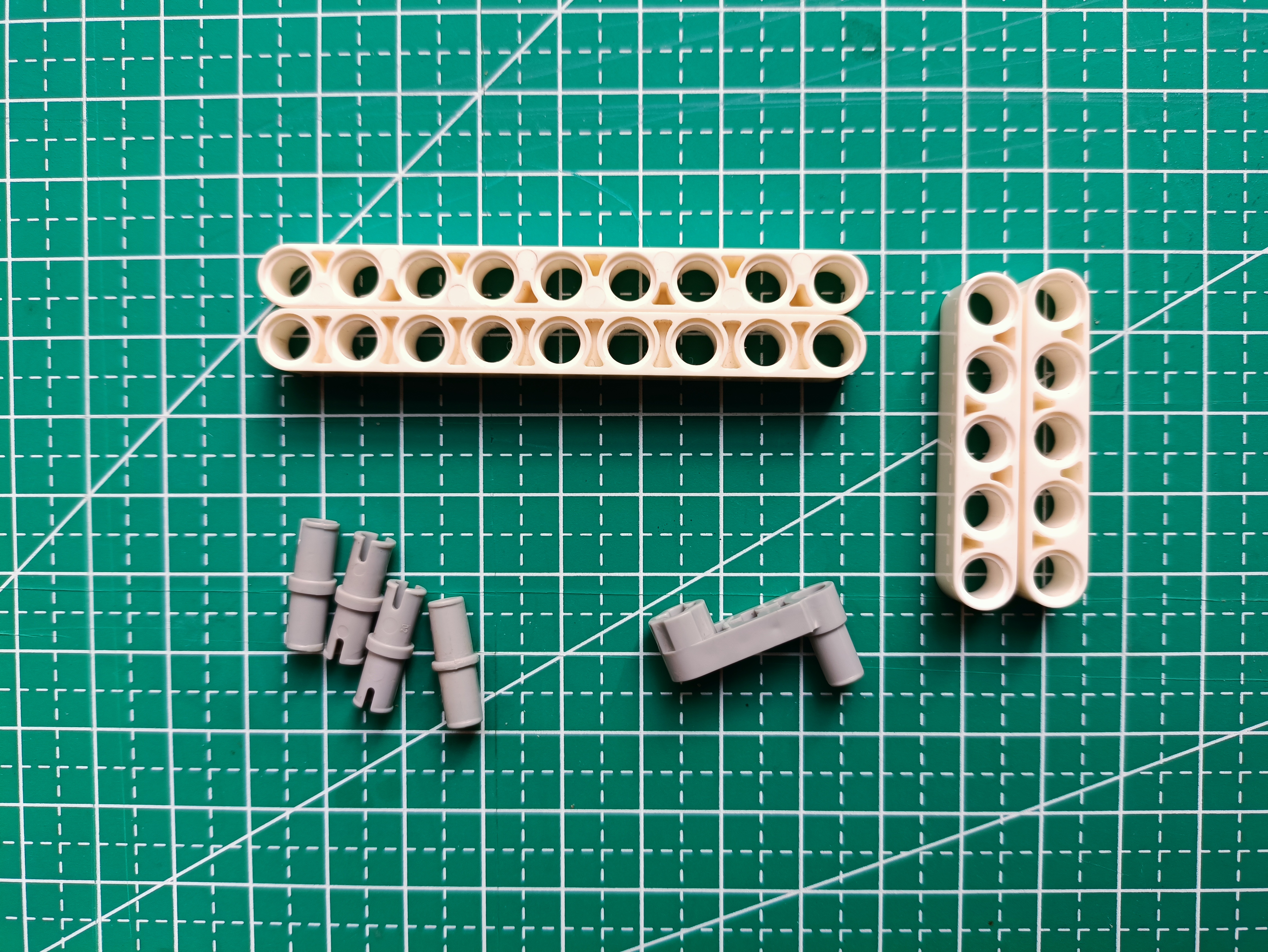
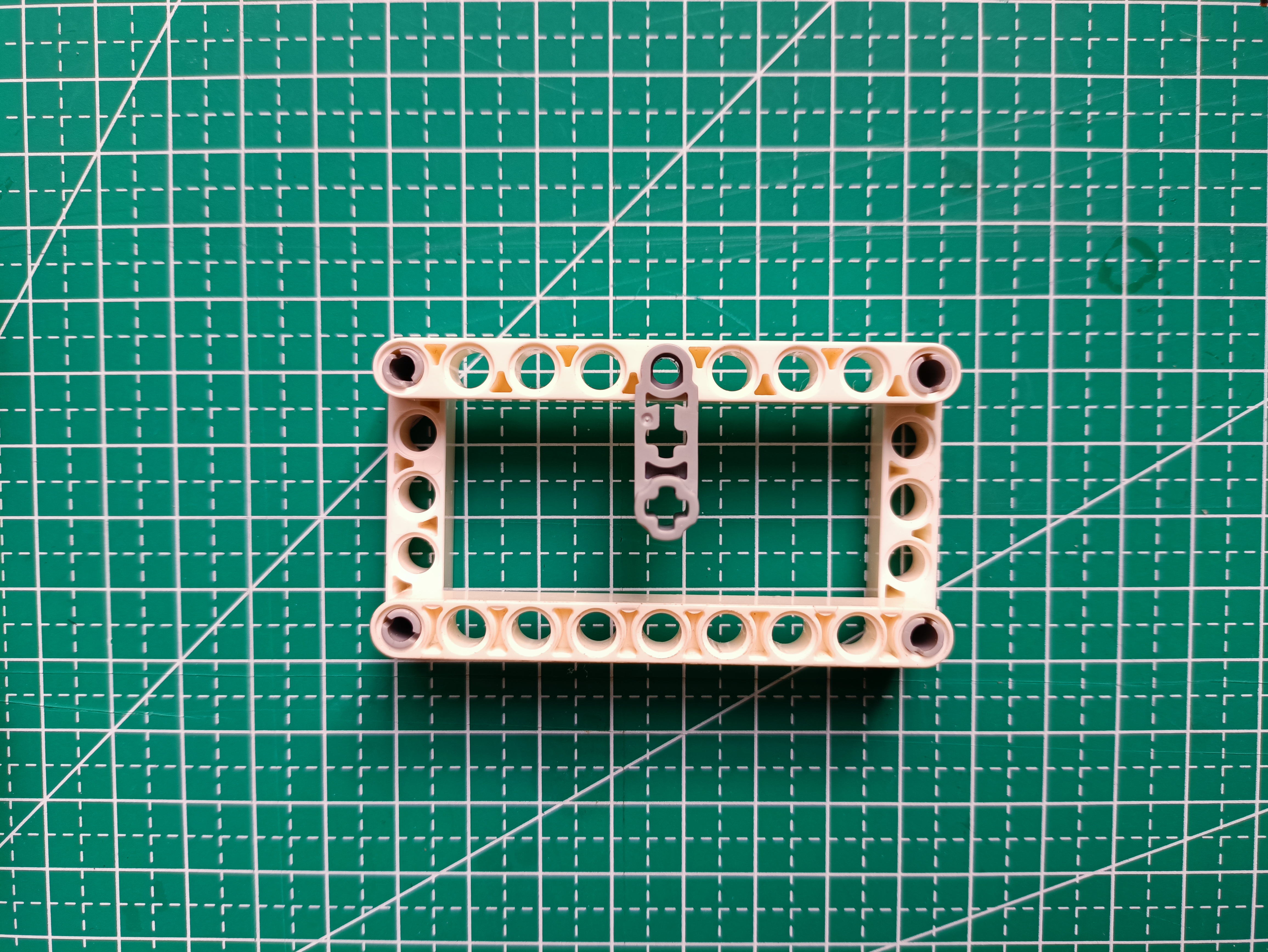
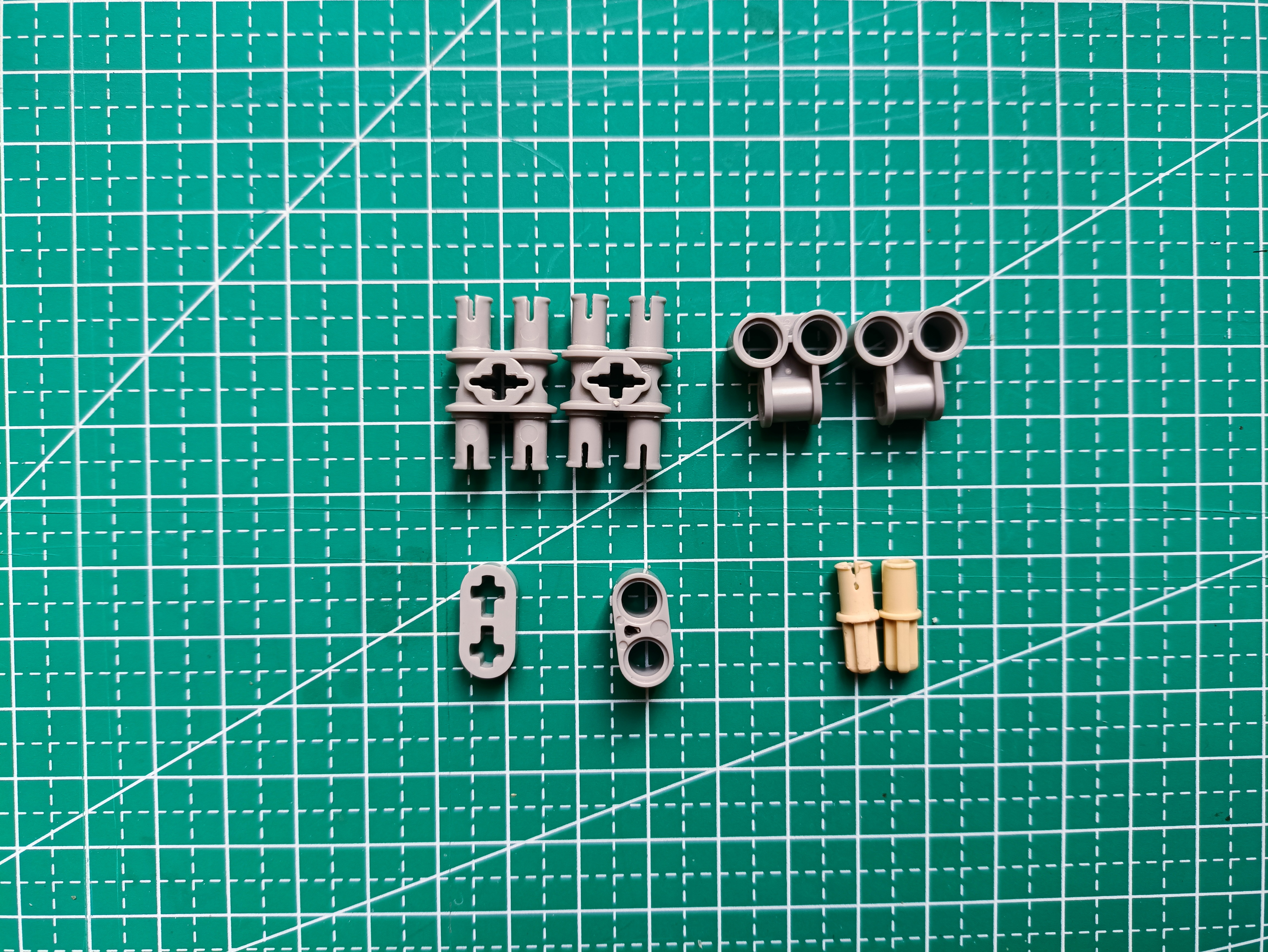
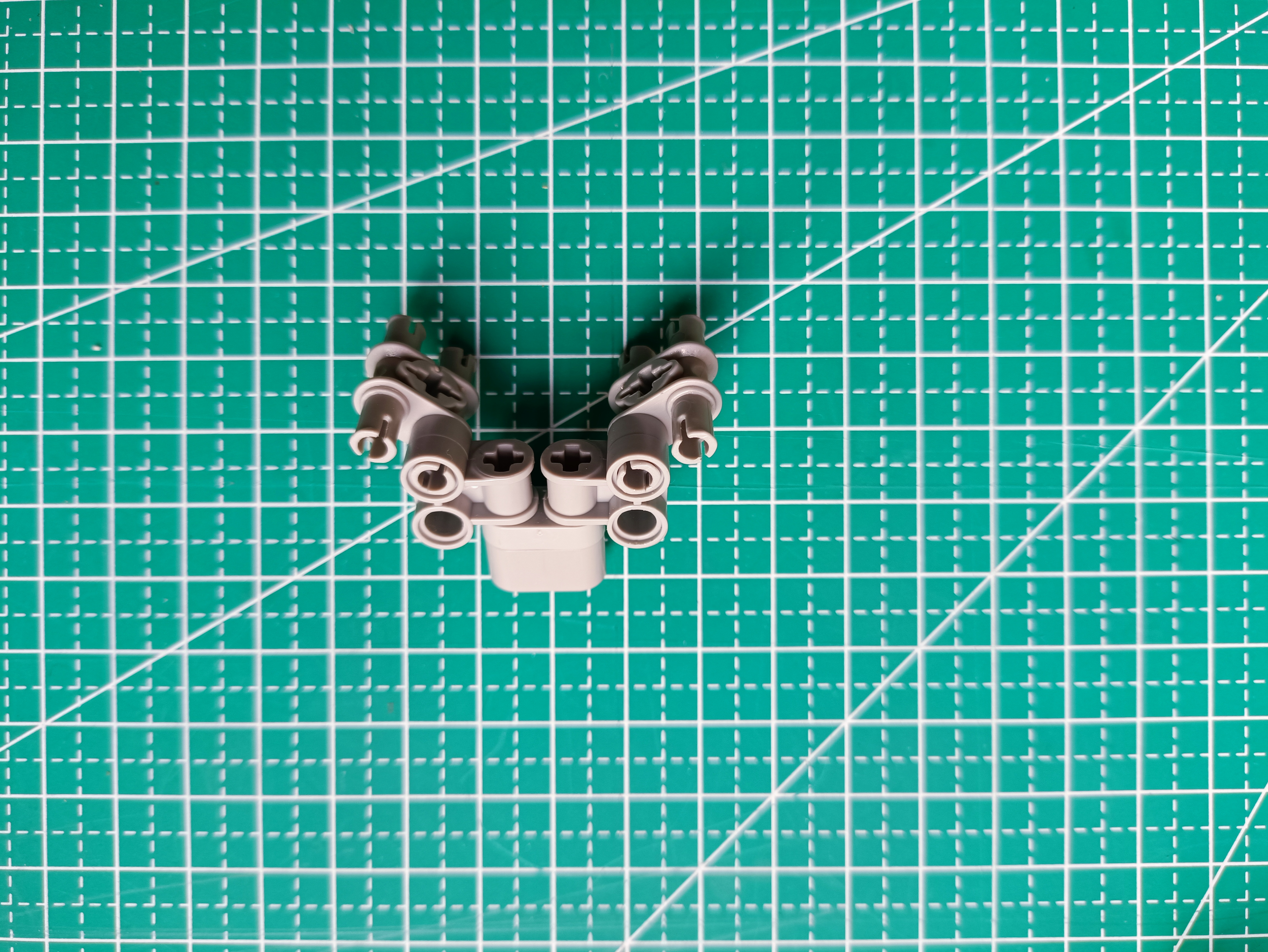
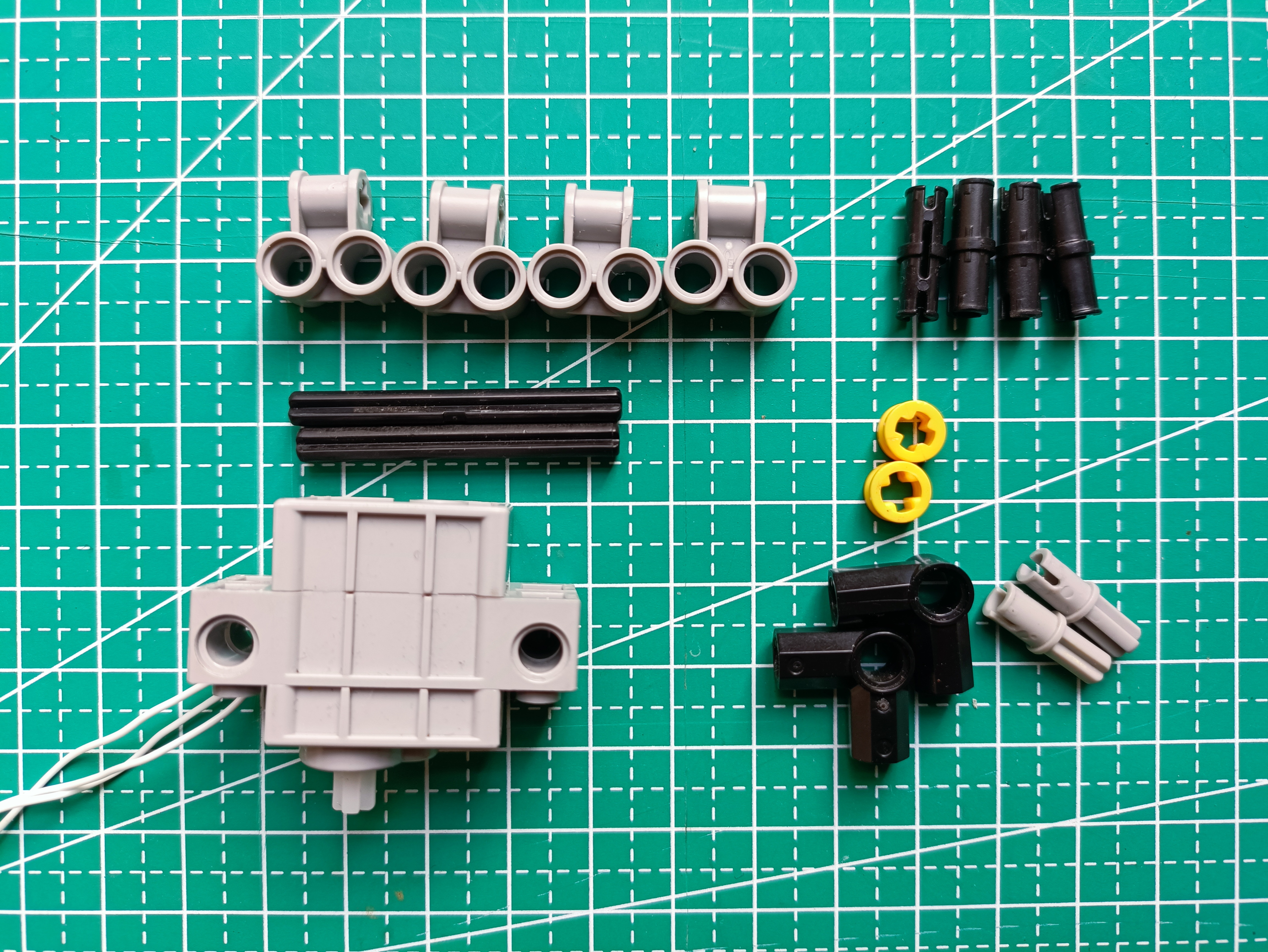
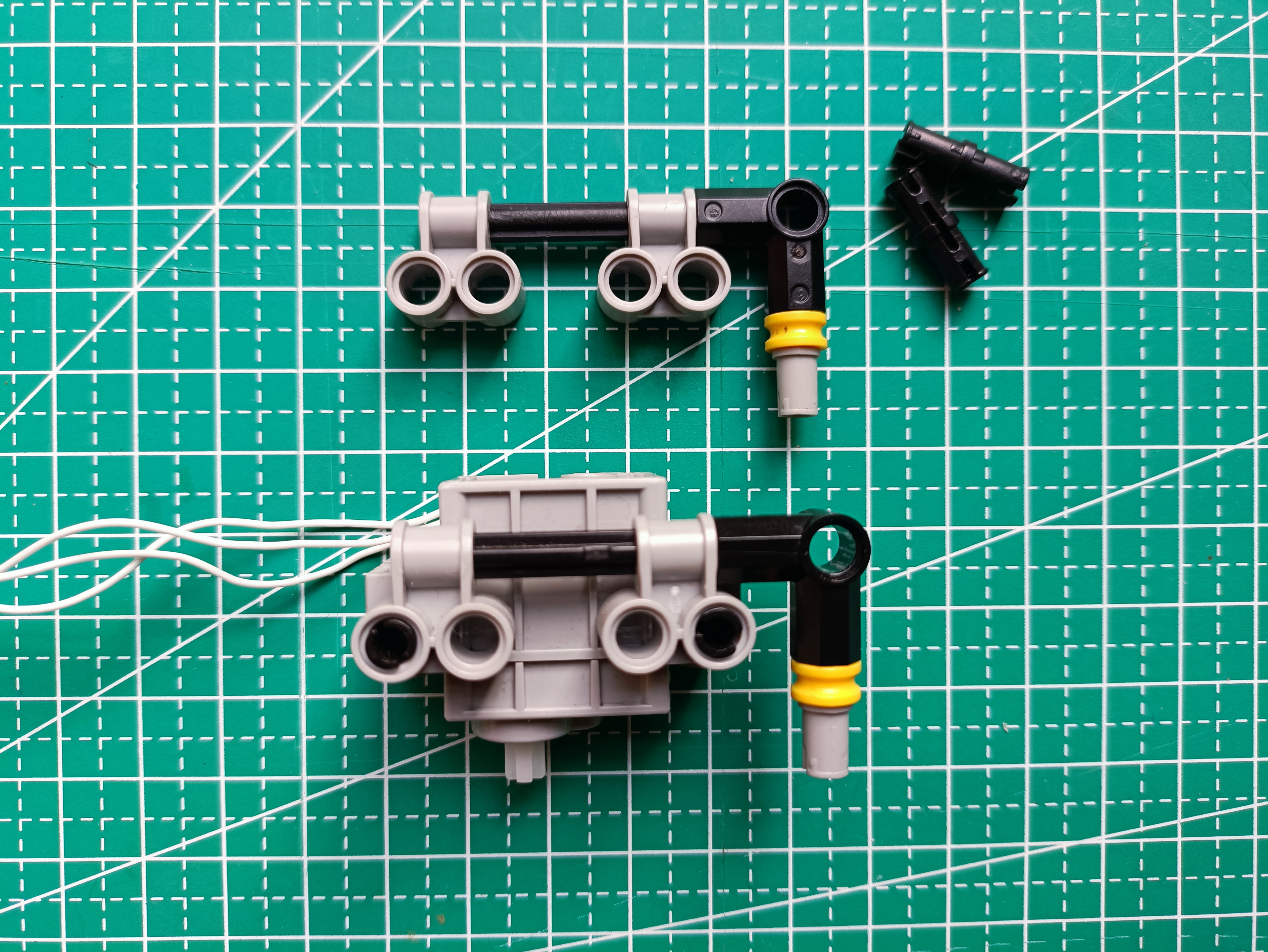
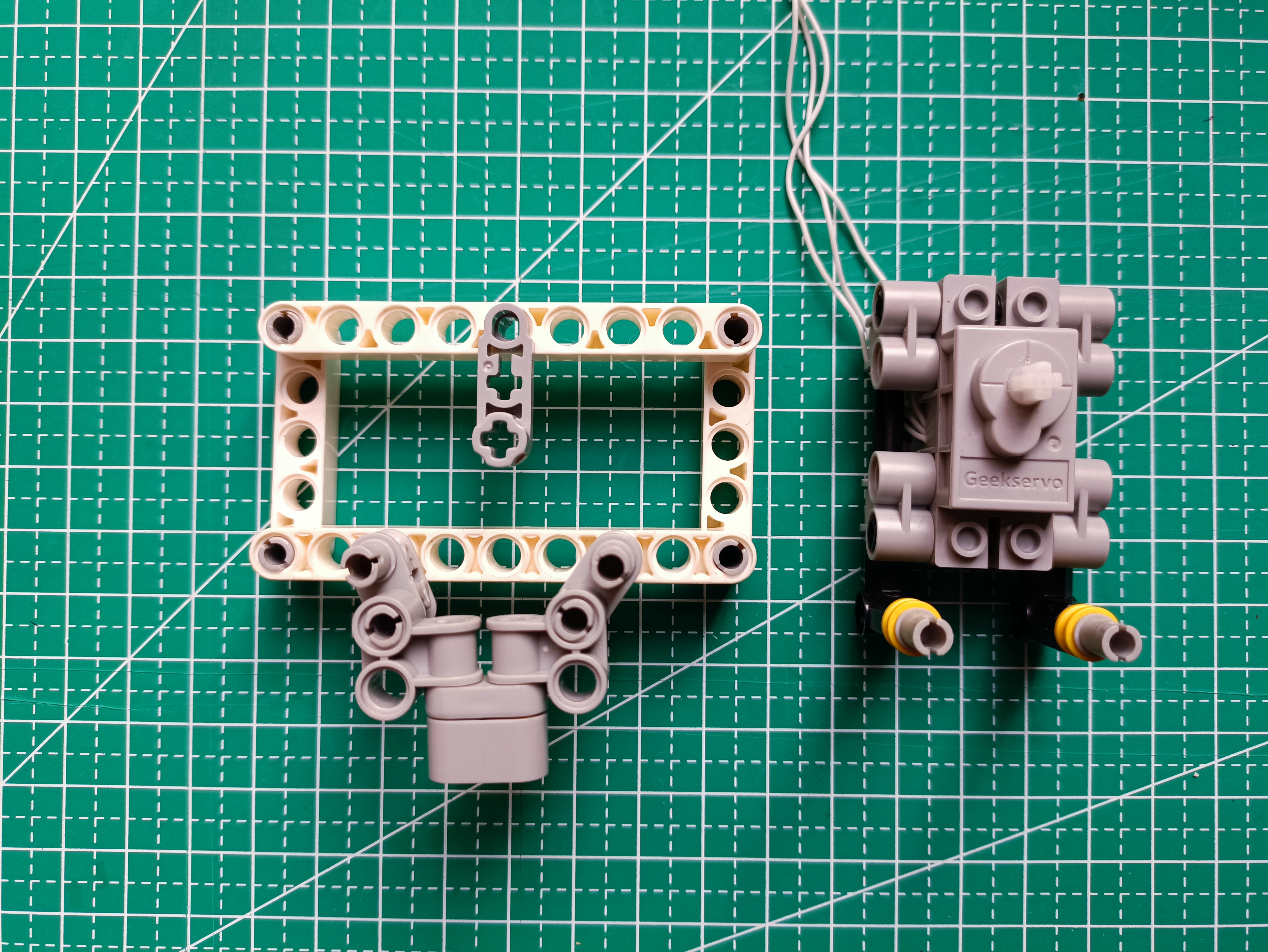
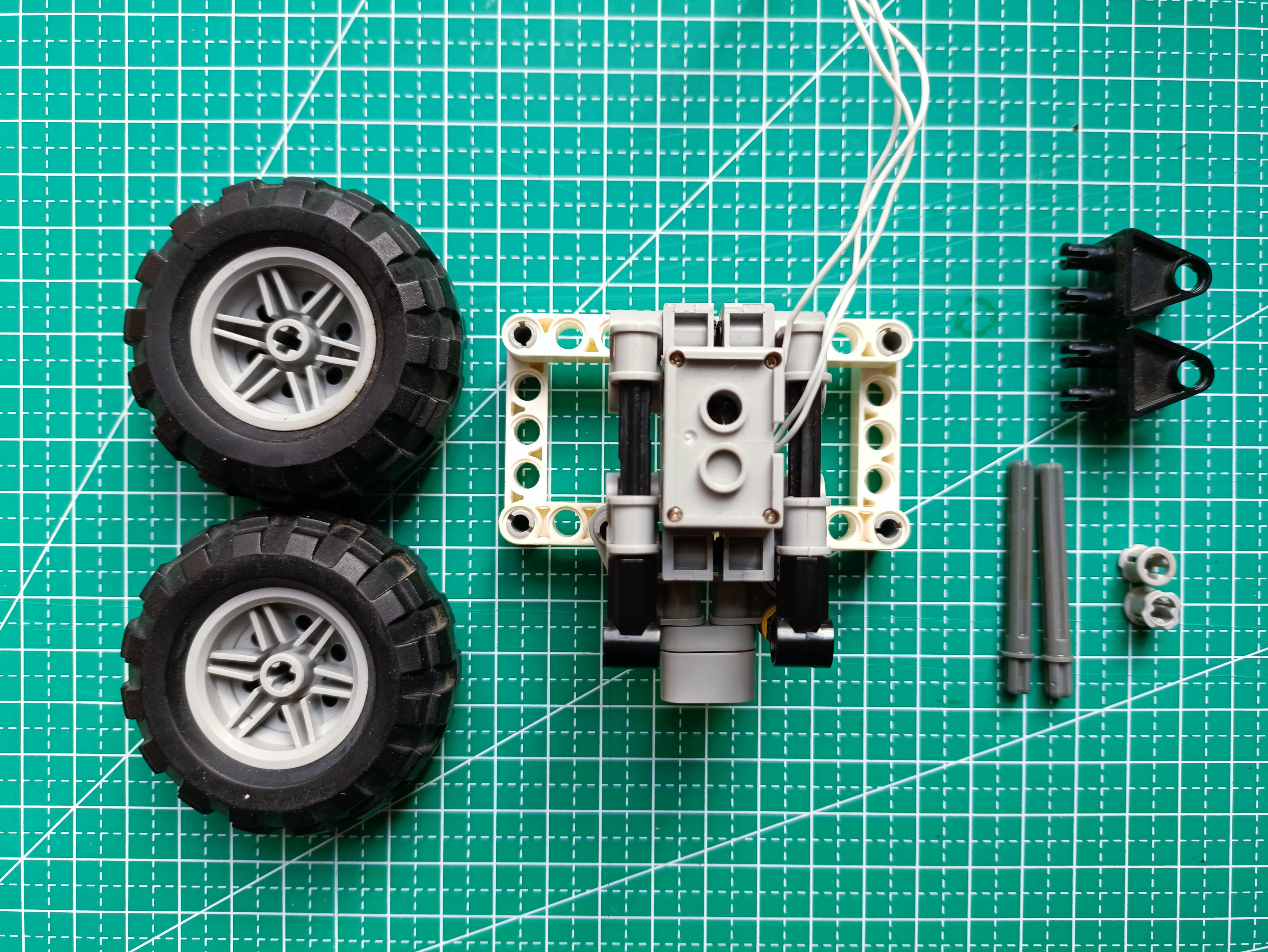

其它部分按照自己手上乐高积木自由搭建。
我的M10版仰望小车是模块化设计,它分为前轮转向部分、后轮驱动部分和M10车体连接部分,在做其它项目时可以方便的拆开,用小车时可以快速组装。


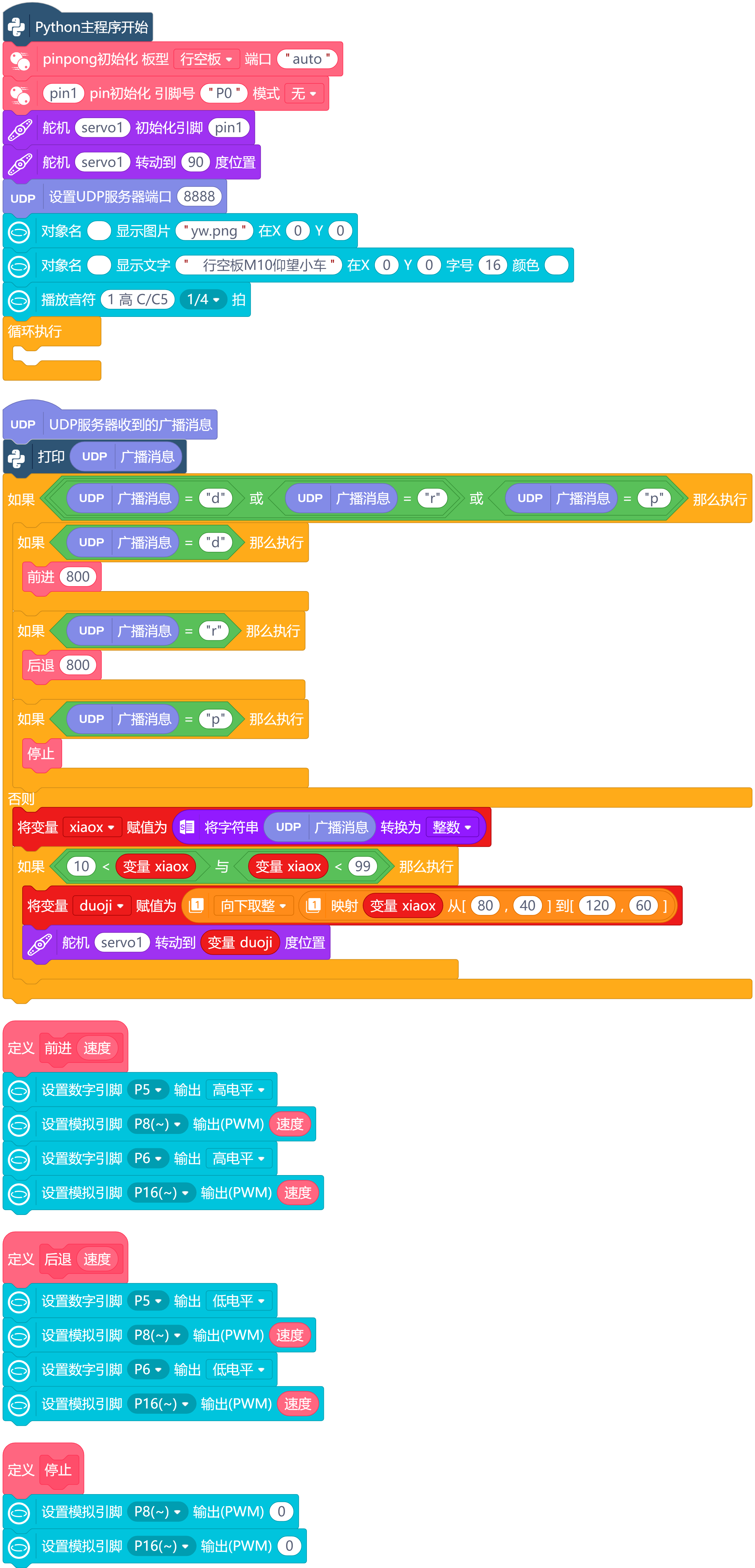
UDP服务器
M10仰望小车:



6.4
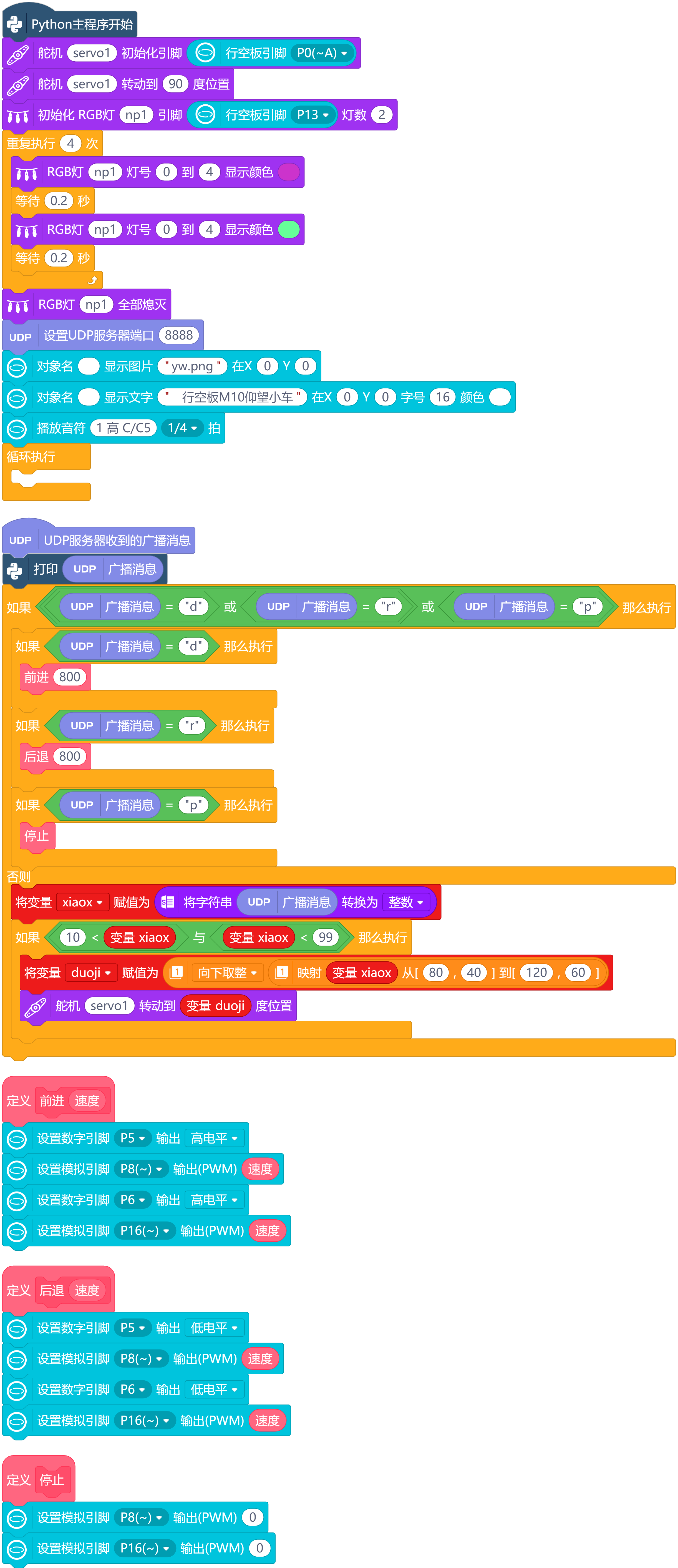
又学习了pinpong库的一些知识,舵机和灯带的pinpong库不需单独初始化,行空板的引脚积木传统默认初始化操作,只需行空板中引脚积木插入相应执行器引脚对象中就可。
所以修改了上面的仰望小车程序:
步骤2 掌控遥控器
遥控器功能,和现实中汽车驾驶的逻辑比较接近:
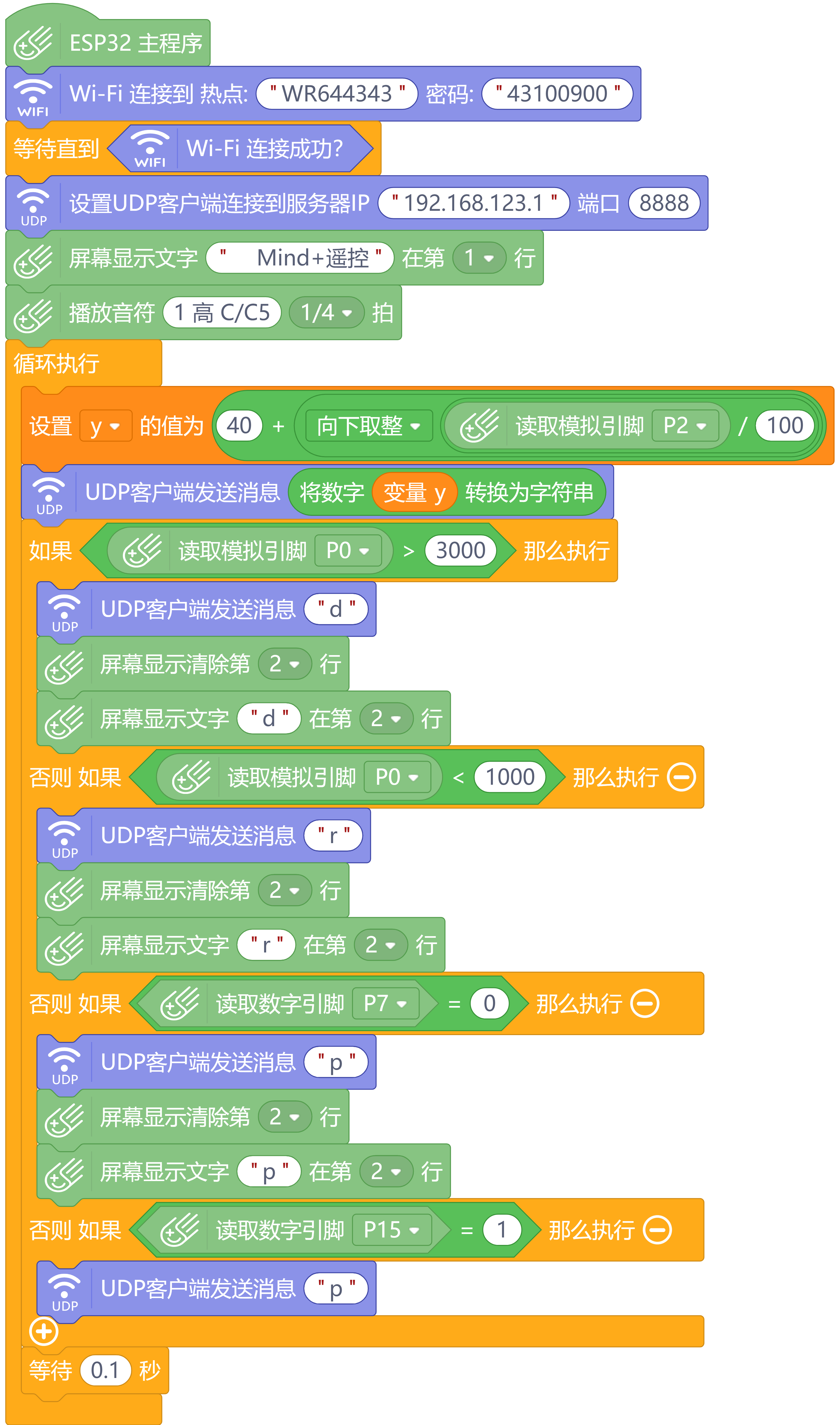
方向控制
方向盘(上图mind+贴纸的车轮)下面是电位器(--P2),转动方向盘发送方向控制信号。
档位控制
上图中的摇杆 它的x,y向是模拟值,在本帖是x向(--P0)上推R档(倒车档)下拉(D档)前进档,y向没有使用。z向是数字值(--P7),按下是P档 - 驻车档。
刹车控制
白色按钮(--P15),在D档和R档时可用,按下刹车按钮减速到0,松开刹车时恢复怠慢,可以加油门加速(本作业中只用到刹停)。
油门控制
右边的滑杆(--P1),上推加速,橡皮筋的弹力可以将滑杆向下拉回。滑杆是模拟值0-4095。在D档和R档时能够通过油门线性加速。驻车时油门不工作(本作业中没有用到)。

UDP 客户端


小结:
不断测试,放弃了一些功能,没有了大数据量的发送与接收,没有了大量文本和数字的转换,实现了基本遥控的功能。


 他的勋章
他的勋章
评论