 返回首页
返回首页
 回到顶部
回到顶部
2.10 晴 周一
明天教工开学会,假期马上清零。
上个作业写了绕线器1.0。问题不少,重点在前面的摆杆速度太快。
又不愿意拆仰望1号2号上的乐高舵机,所以,想法改结构吧,用皮带+蜗轮+齿轮做了一个减速结构,这样子摆杆的速度降到满意的速度了。
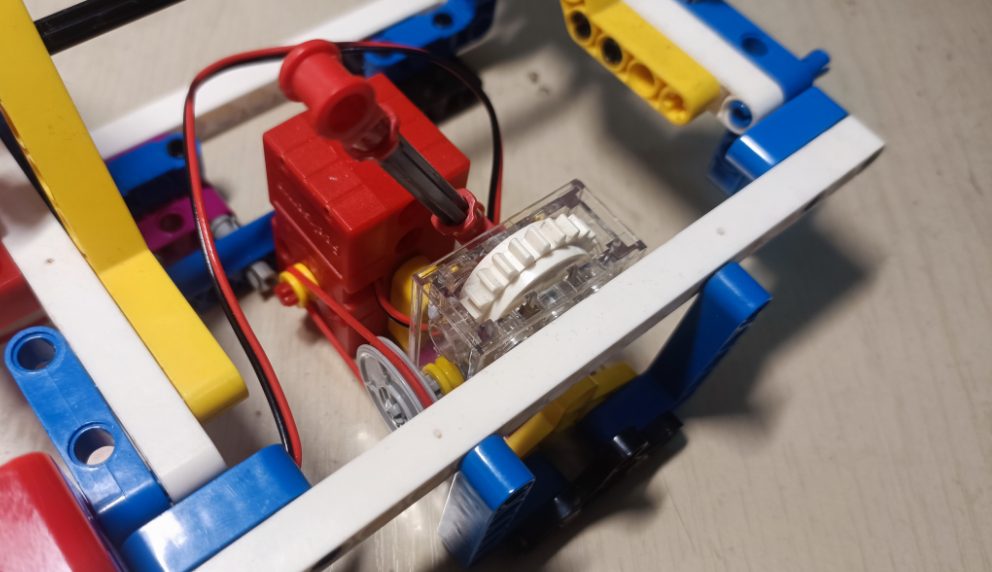
整个装置也简捷了不少。
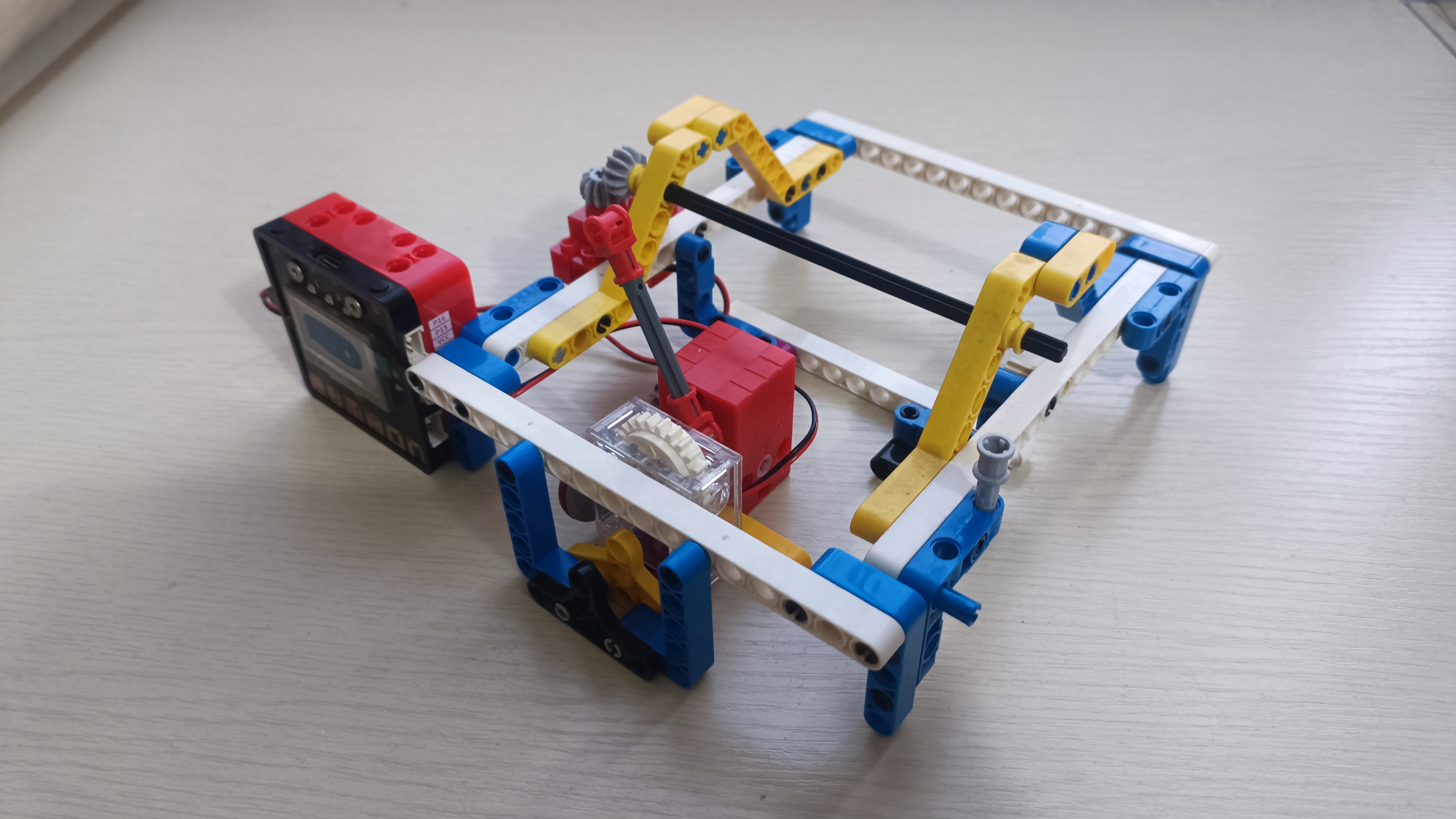
此为绕线器2.0也。
用一个盒子压着线,也不用手拉了。
演示如下:
材料清单
- 乐动掌控 X1
- 乐高电机 X1
- 乐高积木 X若干
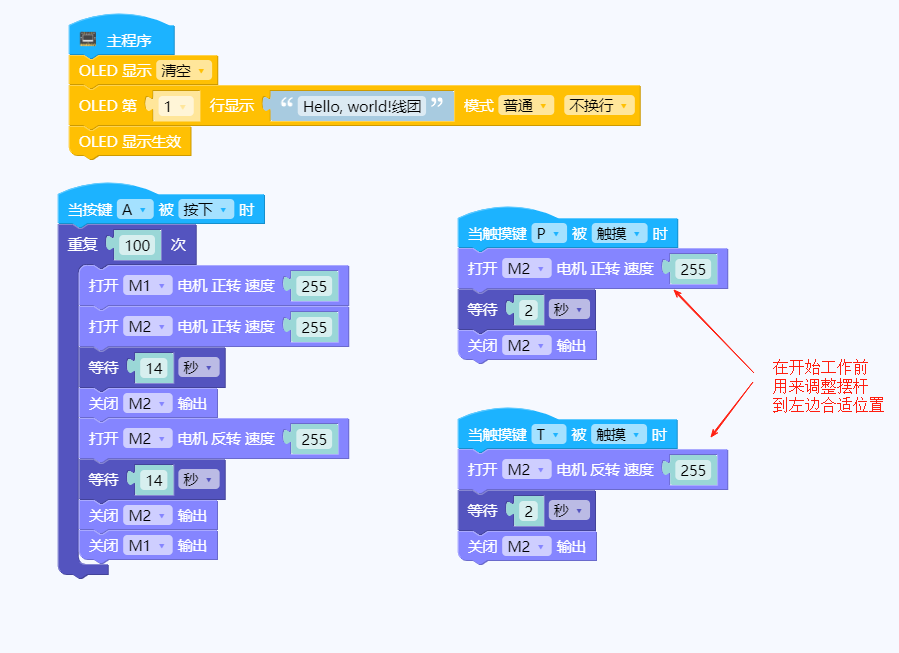
程序很简单:
小结:
1、搞结构时花费了不少里时间,速度是降下来了,但是又发现了一个小问题,用时间来控制M2电机的正转与反转,但是结构并不精准,长时间运行后,会向一侧偏移。
2、程序也有bug,不能想停就停,只有暴力手段,关电,所以还是要优化。乐动掌控的接口太特殊了,手上没有那种转接线,所以决定换主控。
就这样吧,明天继续。


 他的勋章
他的勋章

评论