 返回首页
返回首页
 回到顶部
回到顶部
友情提示:这是一个创客小白的探索。

目标任务:
基地(小车位置)前方左右45度,距离10-20cm,有一个K10包装纸盒(充当危险品),现在小麦昆要通过超声波扫描出它的方位,并把它推出到安全线(50cm)外。
材料清单
- 麦昆 X1
- 推土配件 X1
- Micro:bit X1
- K10盒子 X1
程序测试过程:
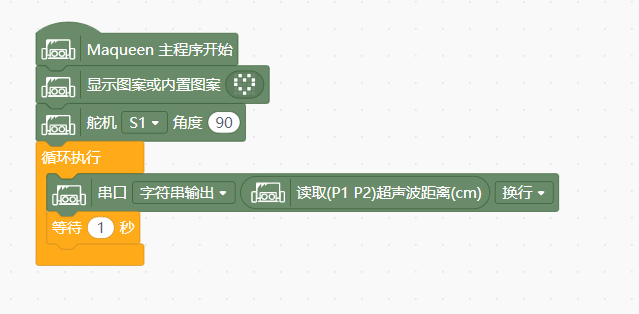
1、安装配件及舵机、超声波模块,舵机接S1,超声波用公母杜邦线接上相应线槽。用程序调整舵机90度,让超声波模块正对前方。读取超声波模块数据(单位cm),检测超声波是否正常工作。
2、两个变量:角度、距离
三个列表个列表:编号、角度、距离,记录数据编号和舵机的角度和超声波读取的距离。
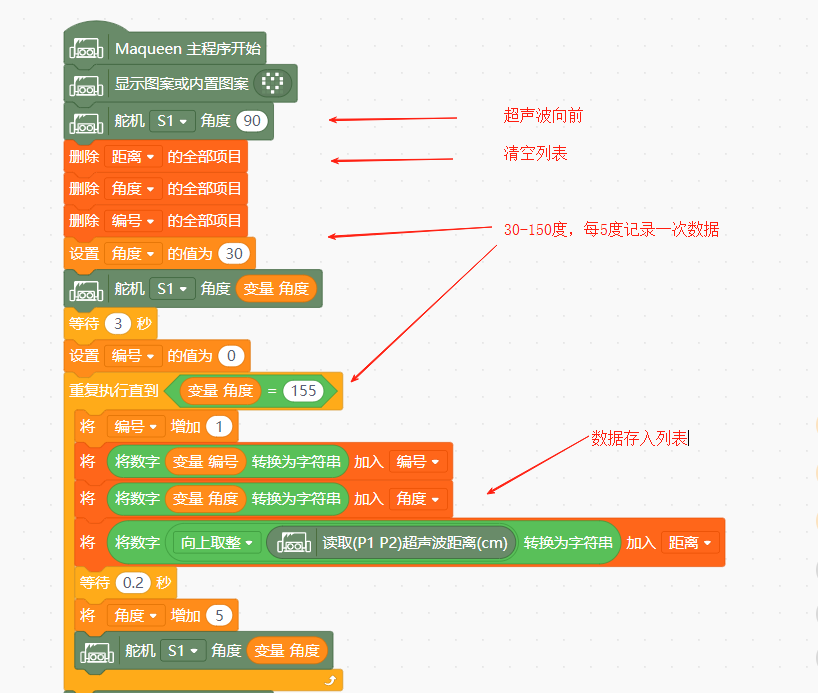
从不同角度不同距离测试数据,B键串口输出列表数据,分析数据并思考如何写程序。

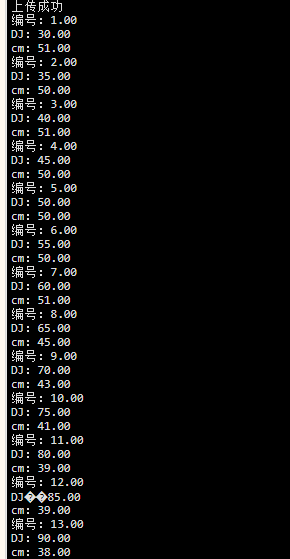
这组是盒子大约在正前方读取的数据,一共25组。
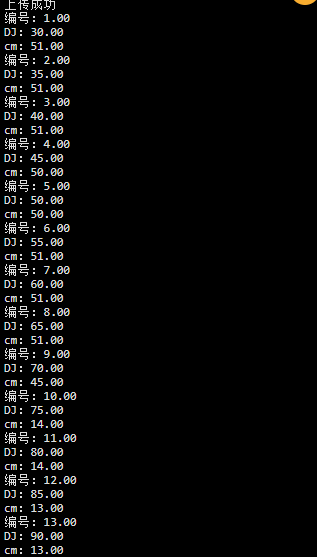
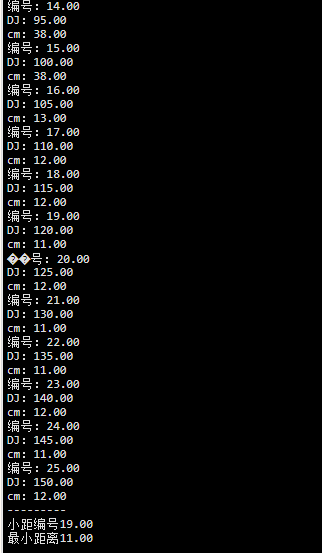
超声波从小车右前开始扫描,到左前结束,一共记录25组数据。
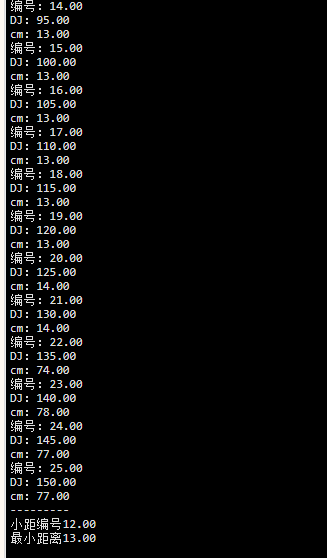
盒子在左前方约45度,数据:
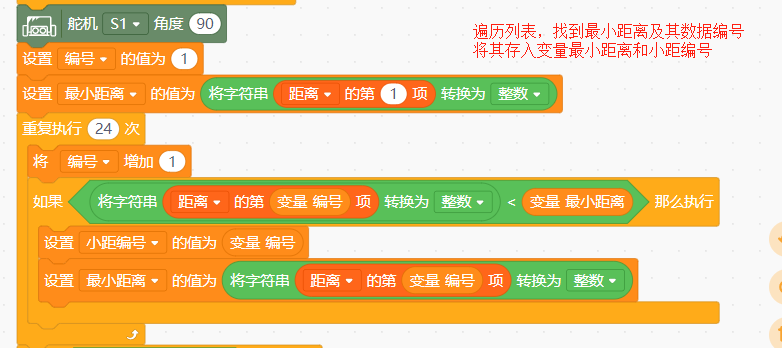
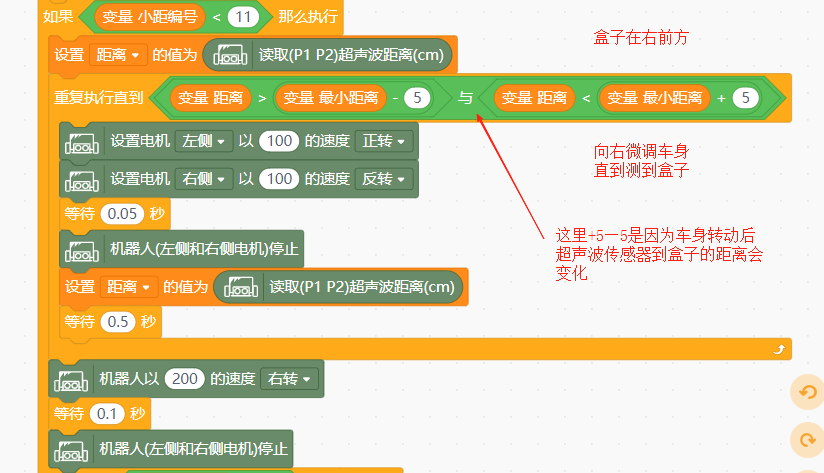
盒子在前方10-20cm,大约可以把数据分为左前区(15-25),前方区(11-14),右前区(10-1),因为无法精确控制麦昆转向角度,所以角度数据在后面程序中没有用到,主要通过编号来确定麦昆由正前开始转向方向,例如最小距离的数据编号在前方区,就不转向了,直接前进推进。(具体编号要不断测试中统计获取比较低准确的数值)
下面部分根据盒子在车子的前方、左前、右前决定是否左右转向寻找盒子和原地不动。
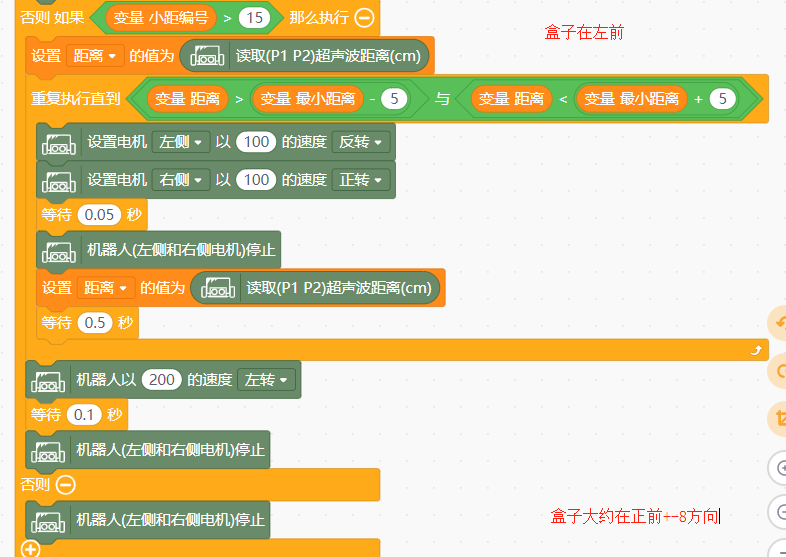
找到方向后就向前把它推出去吧。
小结:
因为小麦昆前进大多会跑偏,所以盒子不能太远,经测试,10-20cm比较合适,方向在正前左右45度范围内较合适,盒子侧向小麦昆(反射面小,方向更好确定)更少失误。
附件


 他的勋章
他的勋章

评论