 返回首页
返回首页
 回到顶部
回到顶部
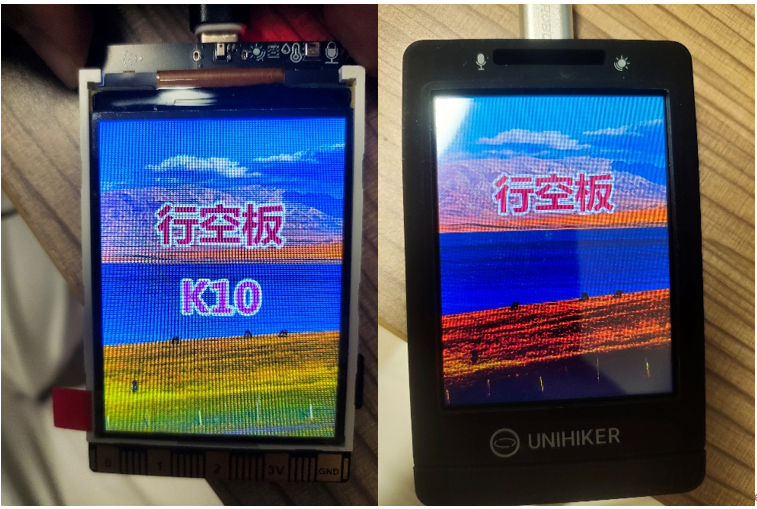
通过查看横向对比编程环境对比,为了更加直接,我同时打开了两个MIND+进行编程,测试屏幕显示图片,屏幕都是320*240的分辨率(颜色偏差可能跟屏幕及拍照角度有关),可以发现两块主板的屏幕在细节上还是有所不同的,屏幕黑色区域,K10在下面,行空板在上面。

编程模式不同,两块板采用的MIND+编程模式不同,K10采用的arduino C上传模式,行空板使用的python模式进行编程。
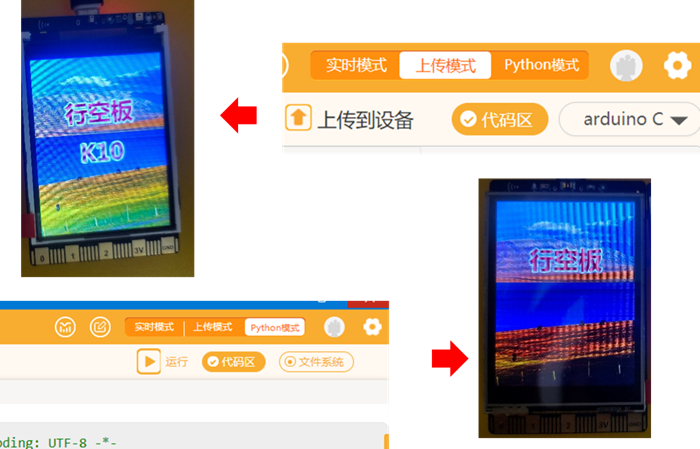
主控板编程连接,K10是通过COM协议传输,选择对应UNIHIKER K10连接,电脑可以直接驱动控制板并刷写内容;行空板是通过网络协议传输,类似将程序发送到行空板进行运行。

MIND+调用相关程序库也不同。K10编程需要选择主控板行空板K10,行空板选择官方库中行空板就可以,感觉K10是一个独立主控程序,行空板更像一个库调用。

因为要显示相关图片,图片的保存位置也不同,K10是使用sd卡保存图片,K10的内存比较小图片、音频等文件都是放在SD卡中,然后将SD卡插到K10,然后用程序调用SD卡的图片等文件,这个操作过程稍微有点复杂,后期修改也需要用读卡器修改文件;行空板直接将文件拖入到项目中的文件,然后上传就会将文件上传,文件暂时不用拓展。

在程序逻辑上K10通过调用内存卡图片来显示,需要两条指令来实现显示,显示时可以设置初始位置,因为图片分辨率设置为320*240显示的为满屏,所以设置位置为0,0。

查看运行效果,K10上传的速度稍微慢一点,但是重启设备后,K10会自动运行上一个程序,行空板则需要进行启动设置才可以运行相关程序。


 他的勋章
他的勋章







评论