 返回首页
返回首页
 回到顶部
回到顶部
双电机可控"螃蟹"机器人主体,另外再加一个micro:bit作为遥控器。

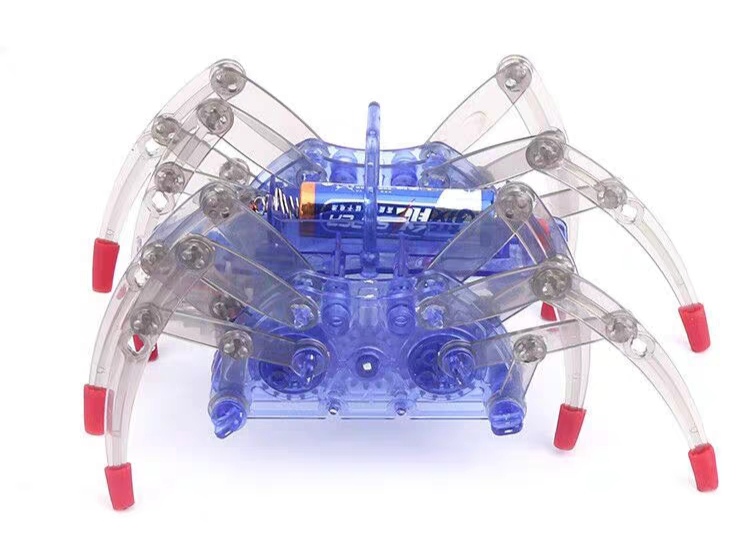
单电机不可控"蜘蛛"机器人简介
利用网上买回的拼装玩具——蜘蛛机器人套件,制作简易仿生螃蟹机器人(同事们第一眼看见Ta运动直接说像“螃蟹”!还真是的!走路不像蜘蛛,倒更像螃蟹!)。
这种拼装玩具买回来是一个个零件,看说明书,动手组装。这种螃蟹机器人的结构设计很好,利用齿轮传动连杆结构,需要一个电机就可以带动八条腿运动,让螃蟹机器人走起来美中不足,只能实现前进后退两种动作,而且需要手动调整,也就是螃蟹的前后分不出来。
不过,在抖音等视频平台上发布这个”智障“后,围观依然爆棚 @^@
单电机→双电机“螃蟹”机器人
单电机螃蟹机器人只能够实现手动前进、后退,那么我们购买两套螃蟹机器人的零件,然后组合在一起,就可以实现机器人的前进、后退,左转、右转,或者是原地自转等。
这个改变原来我就有个想法,直到看到程晨大神的书中真正实现了它,直接激发了我必须要做出来!难点主要是怎样双电机支架的联合固定,因为3D打印机早坏了不想用了,搁置暂停了几个月时间!直到2023.10.16这一天!废了一双筷子感觉难搞,突然想到用圆珠笔芯连接支持,一试成功!发圈!围观!
用老虎钳夹断两个电机内侧金属杆,保留外侧不变。
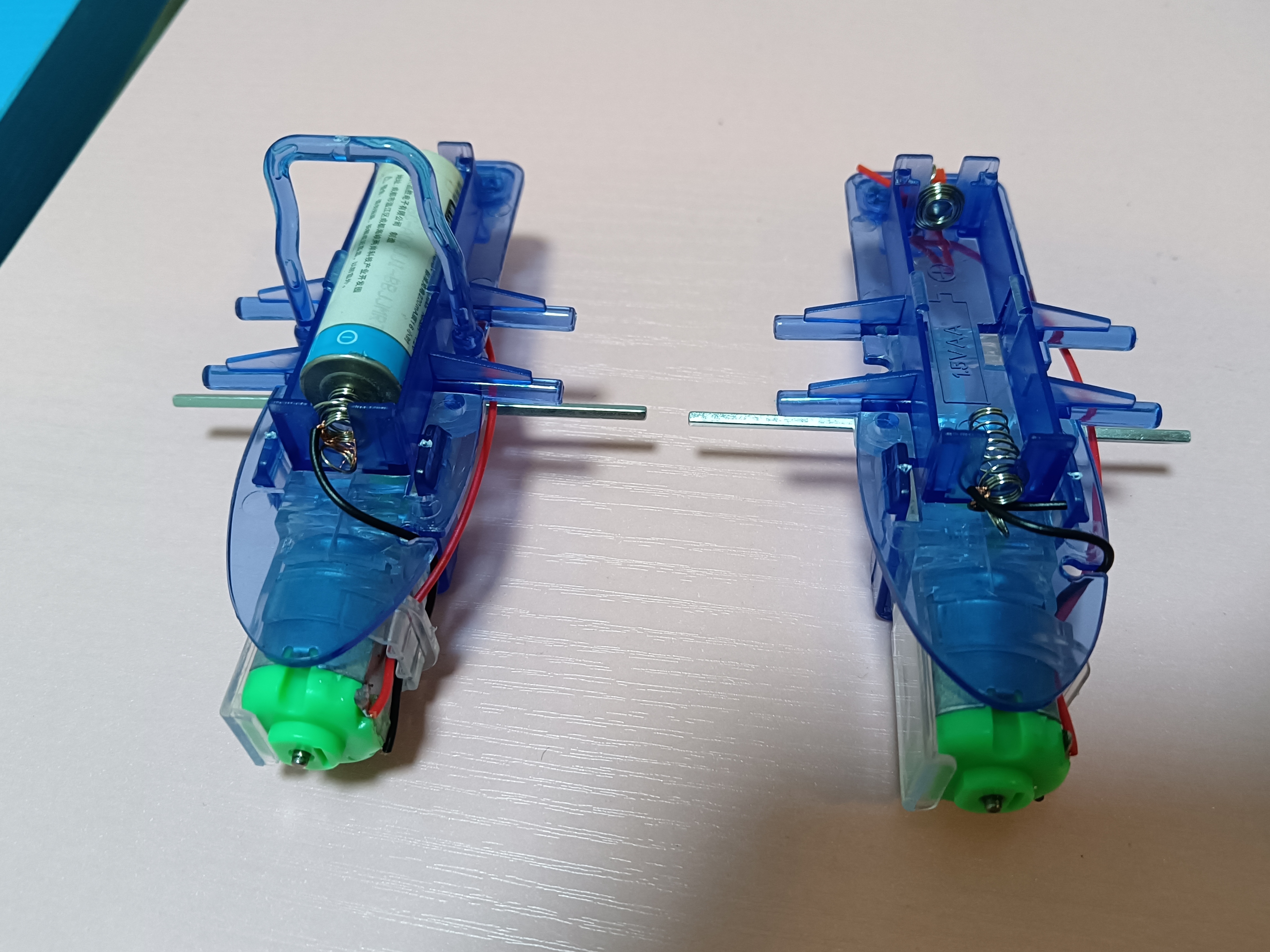
取四根笔芯,如图联接即可。

micro:bit掌控I/O扩展板 + 2*micro:bit + 锂电池
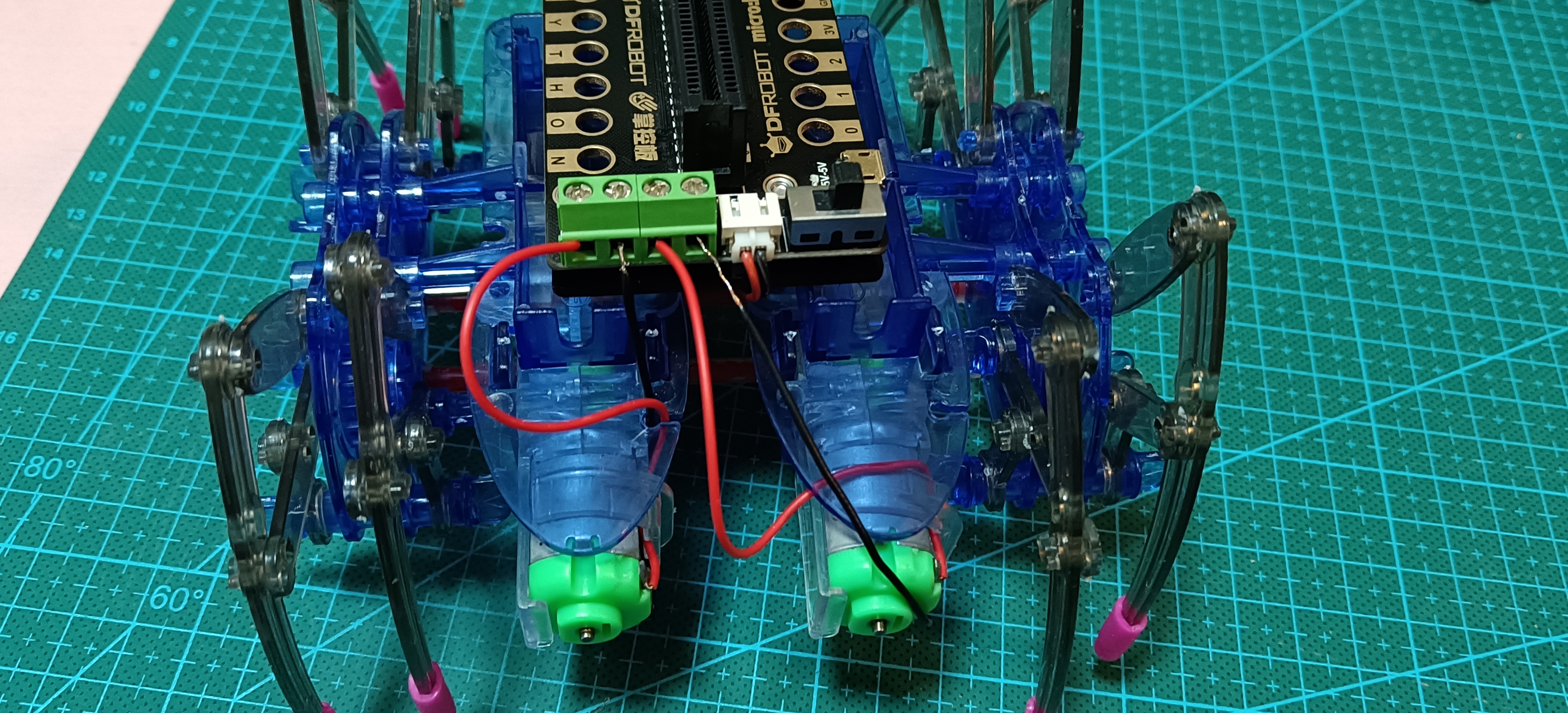
硬件接线图
![YH{]%W67EW)O]PSTN}SA45B.png](https://makelogimg.dfrobot.com.cn/makelog/5a1a070ce455e06a216f8a88/270b887959fd90481439d1b4ea370a75.png)
Mind+ 代码———micro:bit遥控端
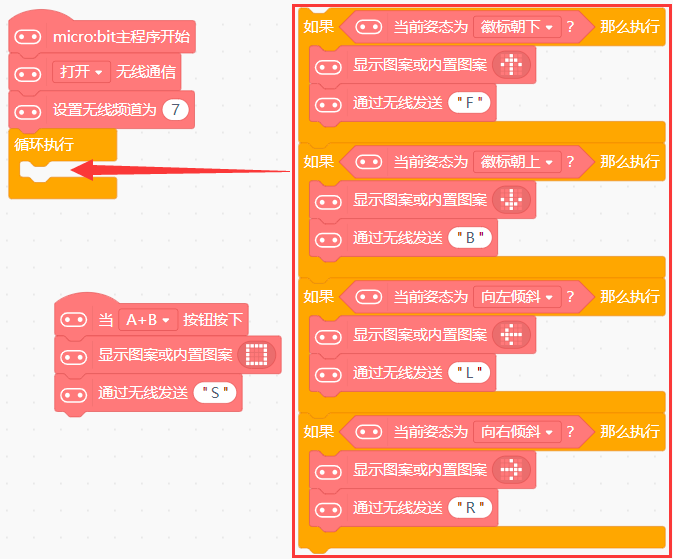
Mind+ 代码———micro:bit ”螃蟹“端
![YO1]K89K2044TQQV01C5}T1.png](https://makelogimg.dfrobot.com.cn/makelog/5a1a070ce455e06a216f8a88/fc39ece19d8bd31e33fefd62d4c5bb11.png)


 他的勋章
他的勋章

伦**2024.03.09
好厉害
easy猿2023.11.26
我以前也有这个想法,毕竟加单片机控制很方便,网上看到这个是单电机的,没想到你做的双电机,解决了转向的问题,优秀
许培享2023.12.01
我也是拖了好几个月