 返回首页
返回首页
 回到顶部
回到顶部
一、项目背景
1.1 项目介绍
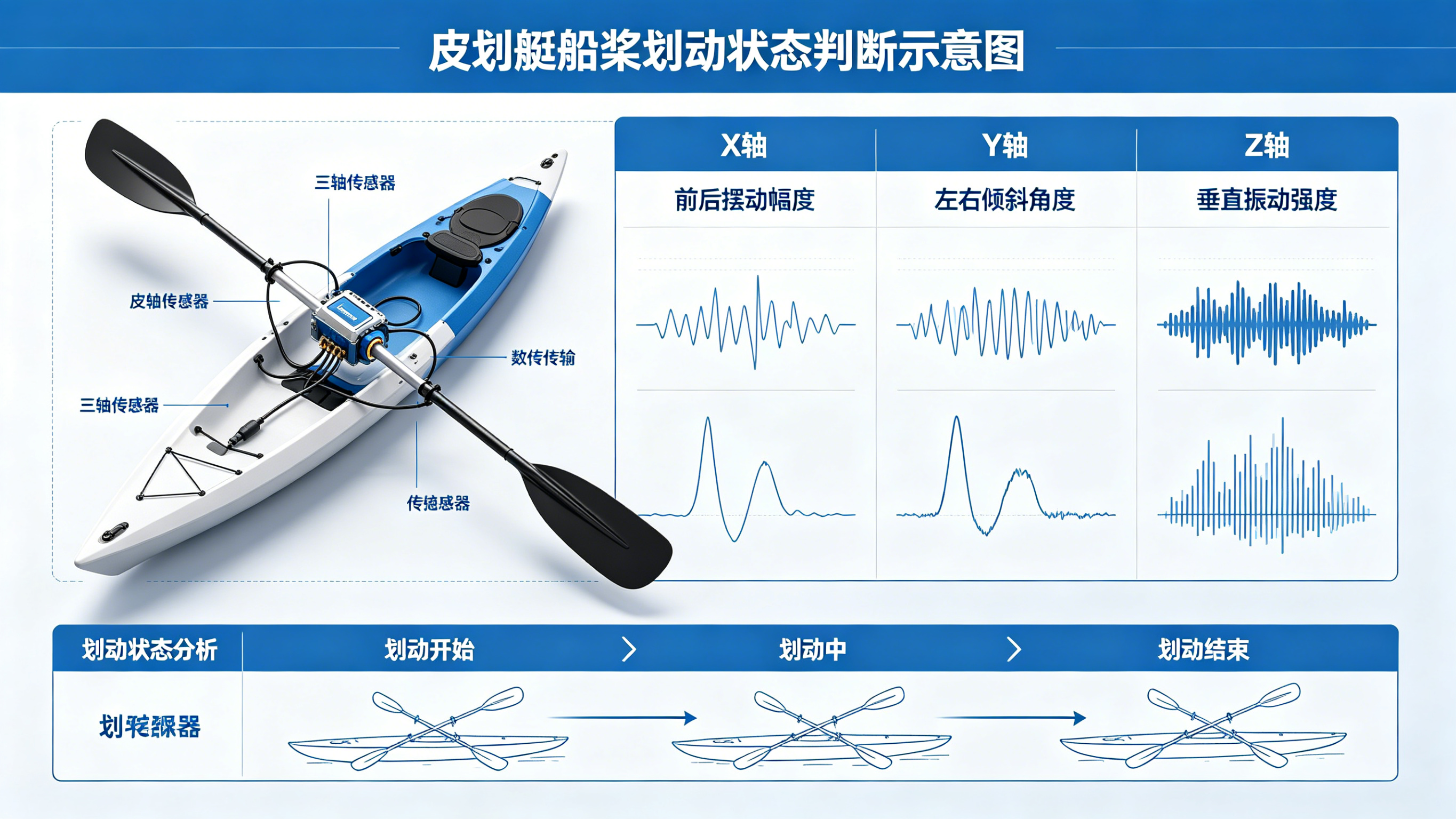
本项目基于时序分析技术与三轴传感器的协同作用,训练了一个能够识别皮划艇艇桨划动状态的深度学习模型。使用者只需在模拟皮划艇训练场景中做出划行动作或保持静止,设备就能通过三轴传感器实时采集动作数据,经深度学习模型分析,快速判断当前状态是划皮划艇还是静止,并通过三轴传感器终端完成数据的实时交互与反馈。
不需要复杂的专业设备——你的划行动作,就是训练状态的“天然触发器”,三轴传感器终端,就是你的“实时数据反馈站”。

1.2 设计理念
这个项目源于对中学生皮划艇训练现状的思考,结合创客实践与科技赋能体育的理念,聚焦青少年皮划艇训练中的核心痛点:
🚣 把控训练状态难
📊 追踪训练数据难
🔧 创客实践落地难
仅需三轴传感器、深度学习模块及终端显示设备,在任何室内外训练场景(教室创客角、体育训练馆、户外练习区),就能通过时序+三轴传感器的深度学习技术,实现皮划艇划行与静止状态的精准识别和实时数据交互。同时,整个项目从中学生可操作的图形化编程搭建、传感器数据采集,到时序模型训练、状态识别与终端交互部署的全流程,都能循序渐进引导中学生完成,兼顾创客实践、科技科普与体育训练需求,寓学于做、寓创于用,让中学生在实践中掌握传感器应用、深度学习等前沿技术,同时为皮划艇训练提供便捷的辅助工具。
二、 时序模式训练
2.1 训练环境
软件 mind+ V2,行空板K10
通过采集并训练行空板K10加速度传感器的 x、y、z 三轴数据,识别皮划艇划动状态和静止状态的时序动作,识别结果会以标签形式显示在屏幕上。
这里为了方便,做了简化,没有加入:入水、发力、回桨等动作的识别
为简化操作,本作品只进行了以下动作的截取。

以及静止状态的训练。

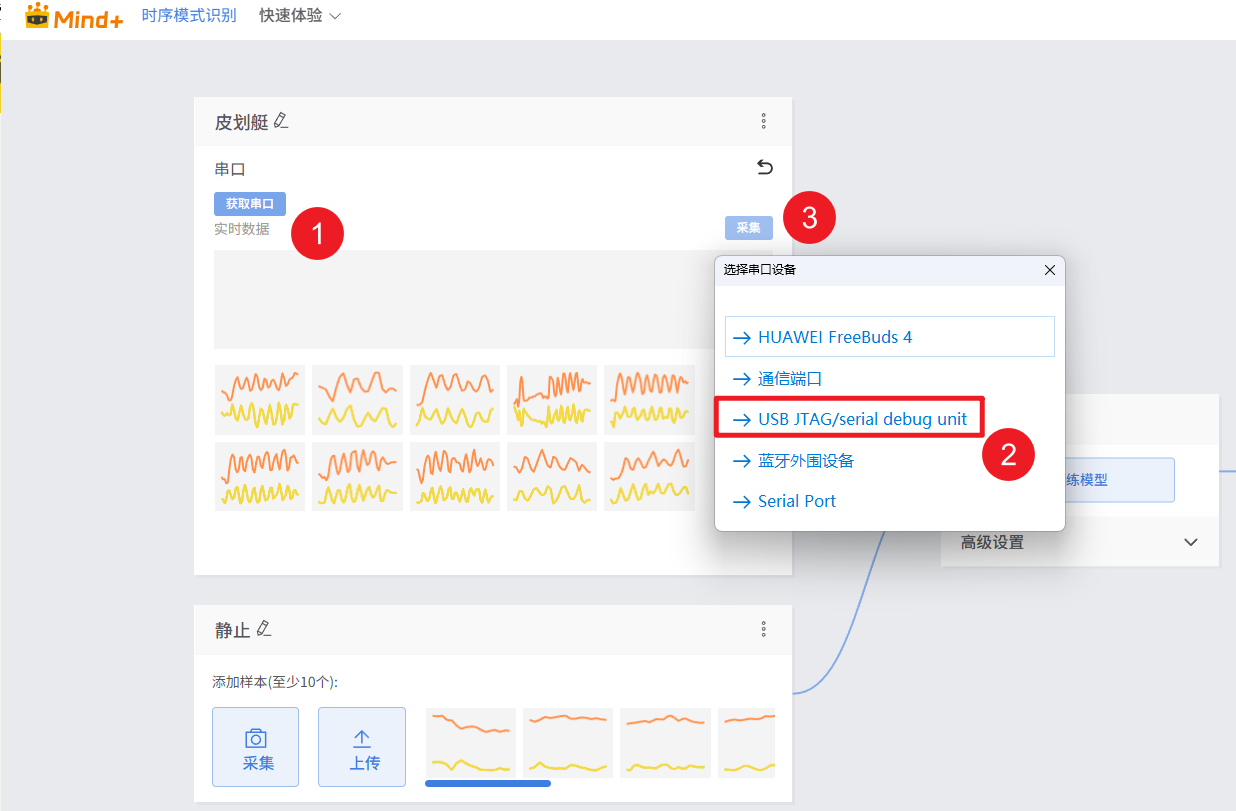
2.3 数据采集
主要通过 行空板K10的串口功能,将三轴传感器的数据发送到 Mind+V2的数据接收口。
- 打开 Mind+,在菜单栏中选择 “新建项目”,然后点击 “程序设计”,选择“上传模式”并点击,即可完成项目创建。

步骤2:添加主控¶
- 点击 扩展,在“主控扩展”中找到 UNIHIKER K10 并下载。下载完成后,点击UNIHIKER K10完成主控加载。主控加载成功后,点击返回,切换到编程界面。

步骤3:程序编写¶
- 利用UNIHIKER K10内置加速度传感器,实时采集三轴数据(x、y、z)。设置采样间隔为0.2s(即 20Hz),并通过串口将加速度数据输出。

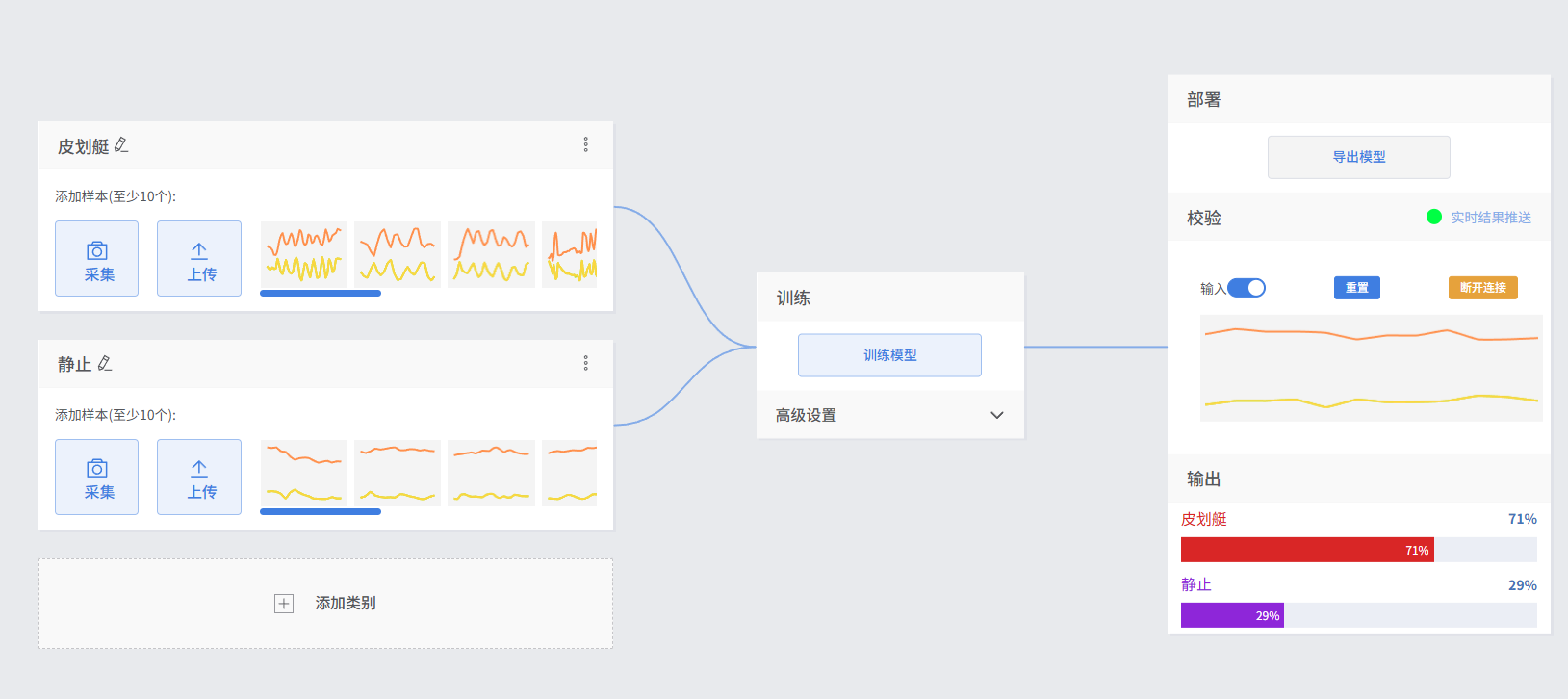
步骤4:训练模型
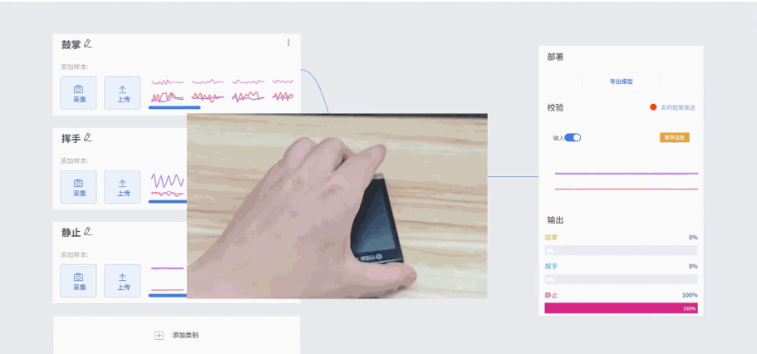
训练模型的方式和其它基本上没有区别,参数默认即可,这里不再赘述。训练好后,可以直接预览效果。
步骤5:实时结果推送应用
大家可以看到,在实时预览界面,有个实时结果推送的标签。这里是可以直接设置的。

通过本地开启SIoT服务,又能看到可爱的MQTT了。
不过,这里为了减少开支,数据是不存服务器的,毕竟推送间隔只有200毫秒,但是可以通过 订阅 的方式获取数据。
三、程序设计与实现
3.1 硬件集成和应用
所以,这里就要祭出我们 行空板 M10(K10)也可以,但笔者比较喜欢M10。Mind+ V2里可以直接开标签页(这个是真爽),新建Python积木模式(话说代码模式什么时候上线啊。。。)

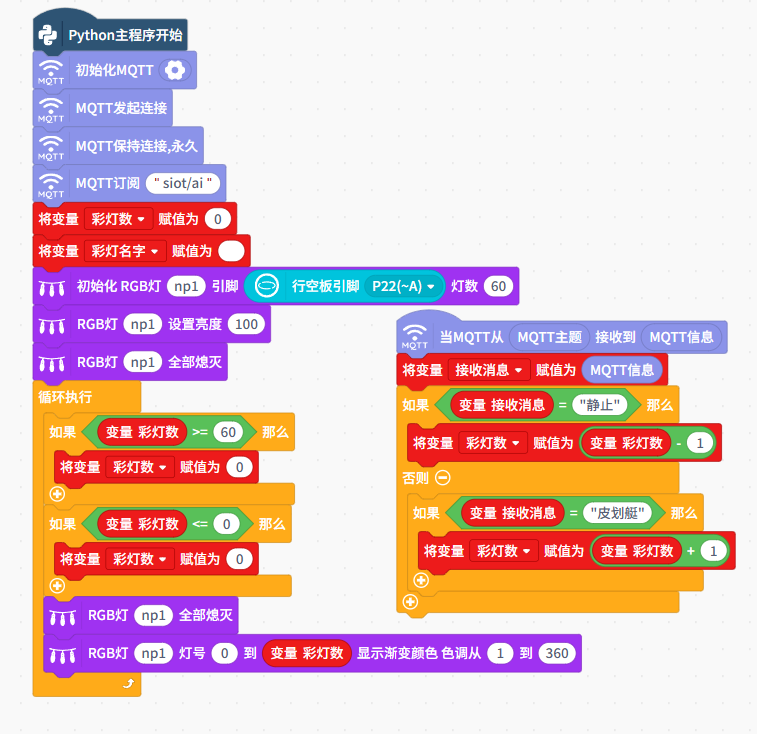
读者可以看到,为了使得交互更加明显,这里加入了ws2812 RGB灯带。
所以本项目使用的设备有:
行空板K10 +1
行空板M10 +1
WS2812 RGB灯带 + 1
Mind+V2 PC本地机 + 1
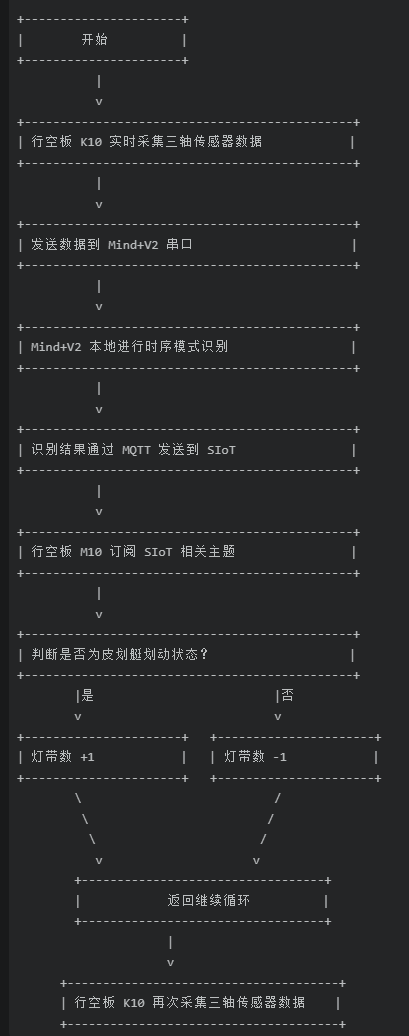
3.2 实现逻辑
本项目的实现逻辑大概是这样的:
四、项目总结与拓展
4.1 项目演示
4.2 拓展方向
本来是让AI生成了一个网页,想做个大项目的,奈何现实很骨感,之后放在这里留作纪念了。

附件


 他的勋章
他的勋章

评论