 返回首页
返回首页
 回到顶部
回到顶部
步骤1 项目简介
本项目基于时序模式识别技术,通过加速度传感器数据区分"走"和"跑"两种动作。系统采用分布式架构:掌控板负责采集加速度数据,电脑进行模型推理,行空板K10显示识别结果。整个系统通过MQTT协议实现设备间通信,形成一个完整的动作识别应用。

步骤2 系统组成与工作流程
系统包含三个主要部分:数据采集端(掌控板)、模型推理端(电脑及Mind+软件)和结果显示端(行空板K10)。
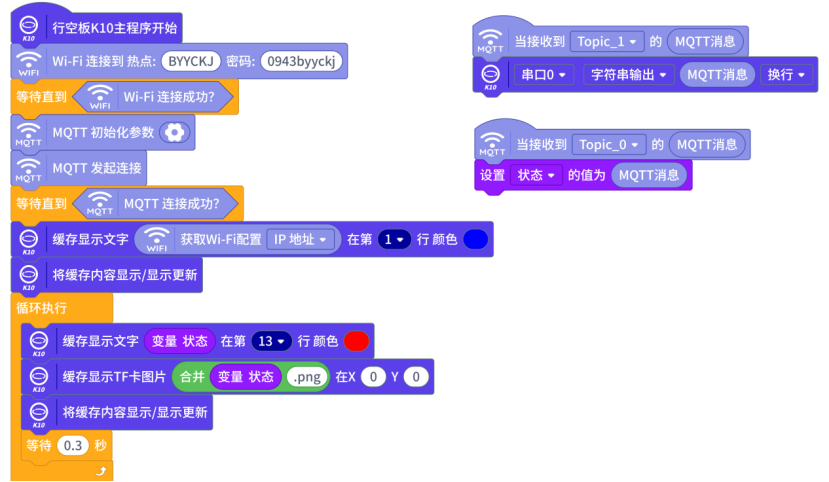
工作流程为:掌控板以0.1秒间隔采集走/跑的加速度数据(x,y,z值)并通过MQTT发送到siot/msg主题;行空板K10接收这些数据并通过串口传给电脑;电脑用训练好的模型分析数据,将识别结果通过MQTT发送到siot/ai主题;行空板K10订阅该主题并显示对应图片。

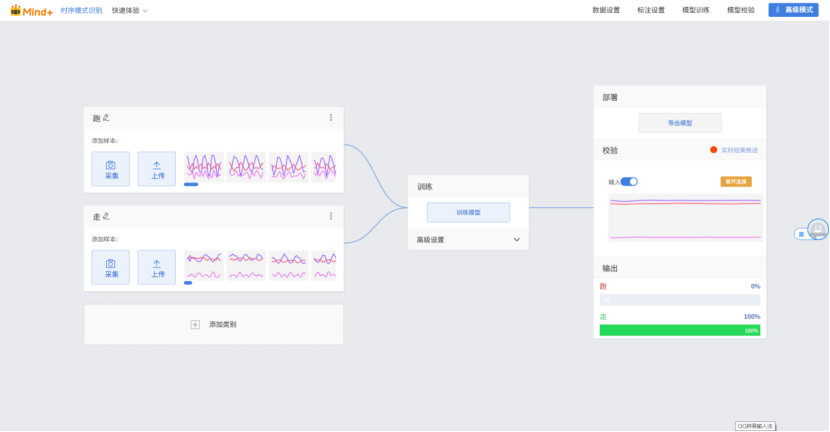
步骤3 模型训练过程
模型训练使用Mind+内测版的时序模式识别功能。首先创建"走"和"跑"两个类别,然后通过掌控板采集训练数据,设置采样间隔为0.1秒,每个动作采集20条以上样本,每条样本时长3-5秒。训练参数包括(使用默认):数据时间间隔100ms、训练轮次100、批次大小16、学习率0.005。训练完成后进行验证,确保模型准确率满足要求。

注:必须使用整数!
步骤4 系统部署与配置
部署过程包括三个环节:
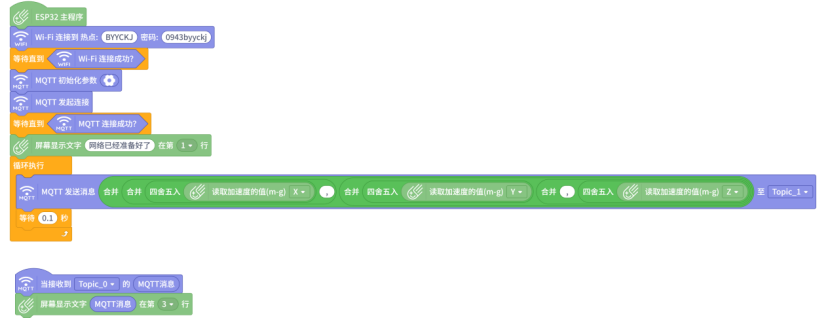
掌控板程序配置连接WiFi和MQTT,以固定间隔发送加速度数据;
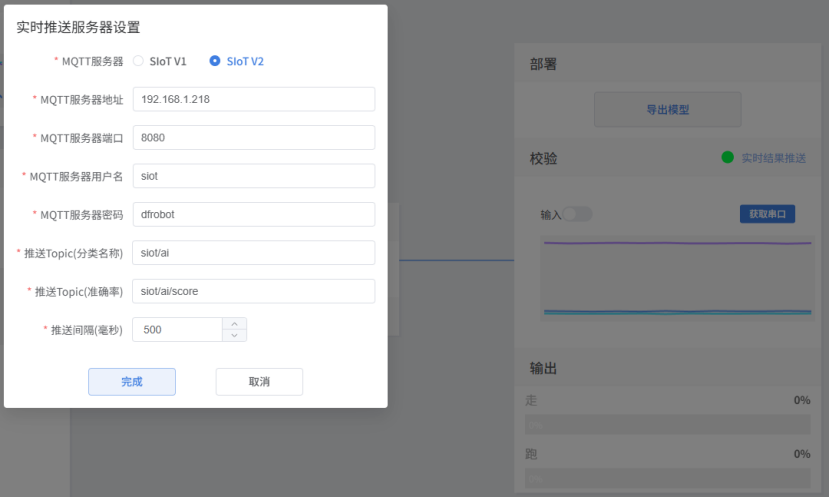
电脑端配置实时结果推送,设置MQTT服务器地址并加载训练好的模型;
行空板K10程序配置连接WiFi和MQTT,订阅识别结果主题并准备显示图片。
关键配置包括统一的0.1秒数据间隔、正确的MQTT服务器IP地址、以及siot/msg和siot/ai主题的对应关系。
步骤5 测试与运行
系统测试需确保所有设备连接同一WiFi网络,MQTT服务器正常运行。测试时手持掌控板执行走或跑动作(手持姿势和训练时要一致),观察行空板K10是否能正确显示对应图标。如遇识别不准情况,可通过增加训练样本、调整动作一致性或优化模型参数来改进。系统延迟主要来自网络传输和模型推理时间。
步骤6 项目特点
本项目完整展示了时序模式识别的全流程,从数据采集、模型训练到部署应用。通过分布式架构实现了传感器数据采集与模型推理的分离,利用MQTT协议实现了设备间的灵活通信。系统具有较强的可扩展性,可方便地添加新的动作类别或调整识别参数。
作者公众号:

附件


 他的勋章
他的勋章

评论