 返回首页
返回首页
 回到顶部
回到顶部
一、创作背景。
在电子制作和创客教育蓬勃发展的今天,电子元件的管理与分拣一直是困扰众多创客工作室和学校电子实验室的难题。传统的电子元件分拣方式主要依赖人工识别和分类,不仅效率低下,而且容易出错。特别是在面对成千上万种外观相似的电阻、电容、芯片等元件时,即使是经验丰富的电子工程师也常常需要花费大量时间来辨认和分类。
随着人工智能技术的快速发展,计算机视觉识别技术为这一问题的解决提供了新的思路。二哈识图(HuskyLens)作为一款专为创客教育设计的AI视觉传感器,凭借其强大的图像识别能力和友好的使用体验,为电子元件的智能分拣提供了技术基础。特别是最新推出的二哈识图2代产品,配备了6TOPS的强大算力和200万像素的高清摄像头,能够精准识别各种微小电子元件的特征差异。
本项目的灵感来源于实际创客工作室的日常需求。在我们工作室的运营过程中,发现学生们经常将使用过的电子元件随意放置,导致元件混杂、难以管理。每次项目开始前,都需要花费大量时间整理和分类这些元件,严重影响了创作效率。同时,我们也注意到在各类电子竞赛和教学活动中,元件分拣环节往往成为制约项目进度的瓶颈。
基于这一现实需求,我们提出了基于二哈识图2的电子元件智能分拣装置设计方案。该装置旨在通过AI视觉识别技术,实现电子元件的自动识别和分类,解决创客工作室在元件管理方面的痛点。项目不仅具有实际应用价值,还能作为人工智能教育的典型案例,帮助学生理解机器学习、图像识别等前沿技术的实际应用。
通过本项目的实施,我们希望为创客教育领域提供一个可复制、可推广的智能分拣解决方案,推动AI技术在创客空间的普及应用,同时为培养青少年的创新思维和实践能力贡献力量。设计和制作步骤如下:
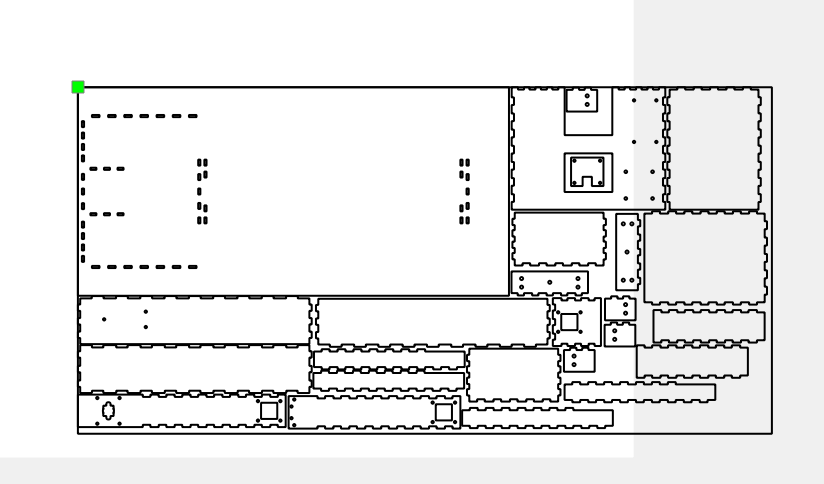
步骤1 电脑软件上绘制激光切割图纸,如下图所示。
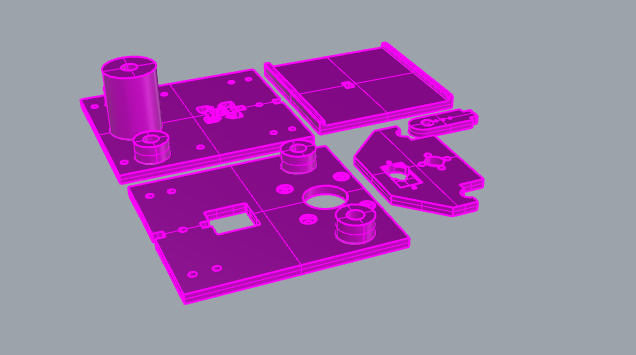
步骤2 电脑端设计3D打印结构件,如下图所示。
步骤3 激光切割加工木板。

步骤4 3D打印零件。

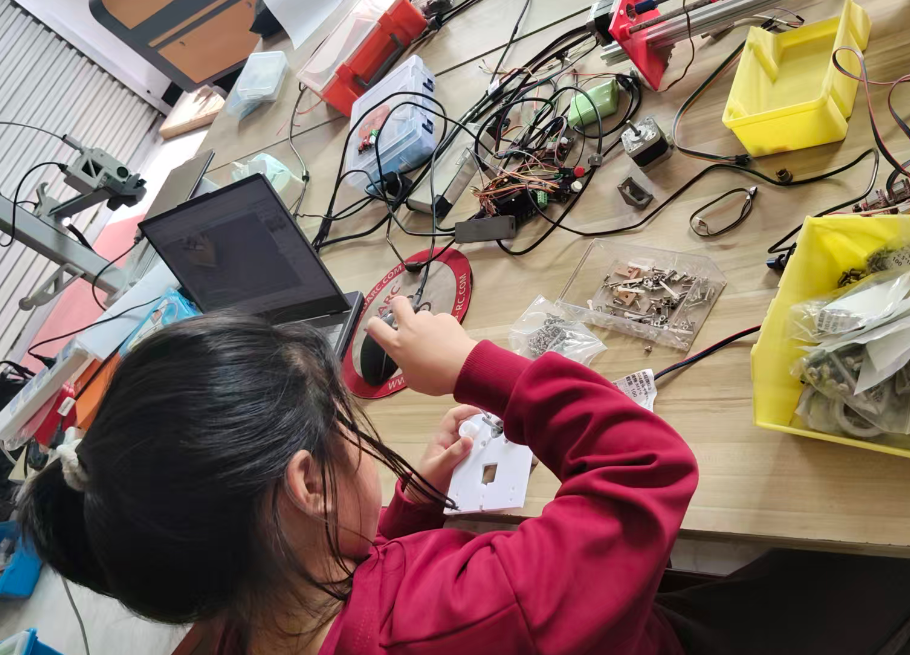
步骤5 将零件组装。
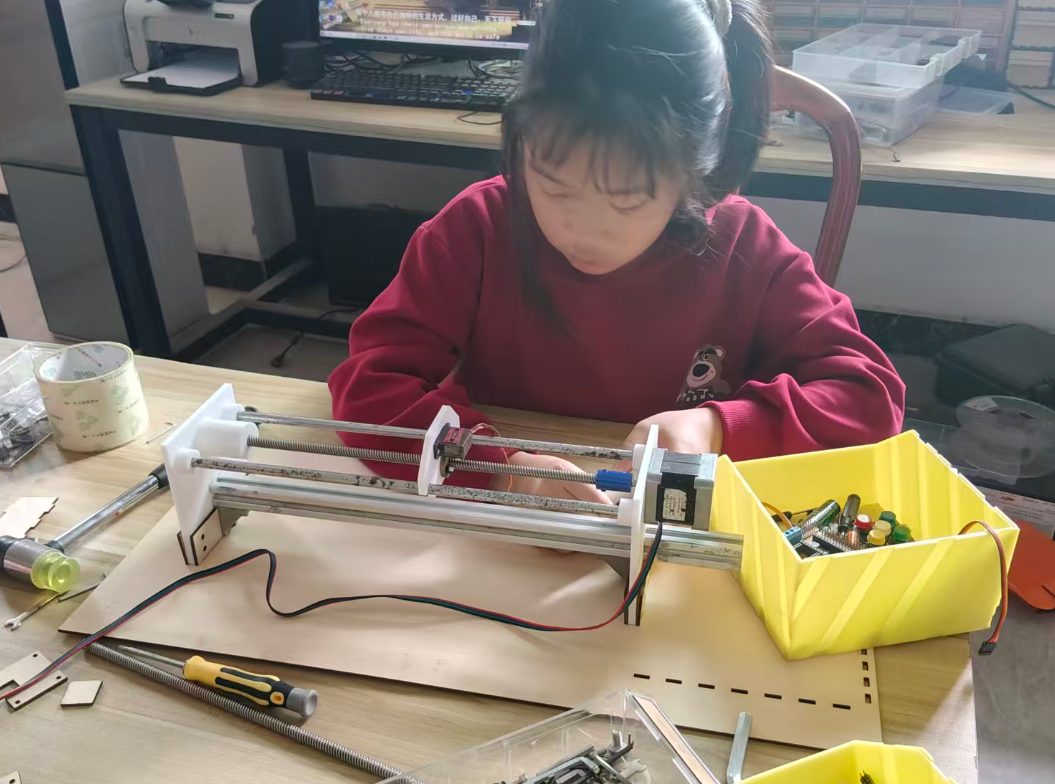
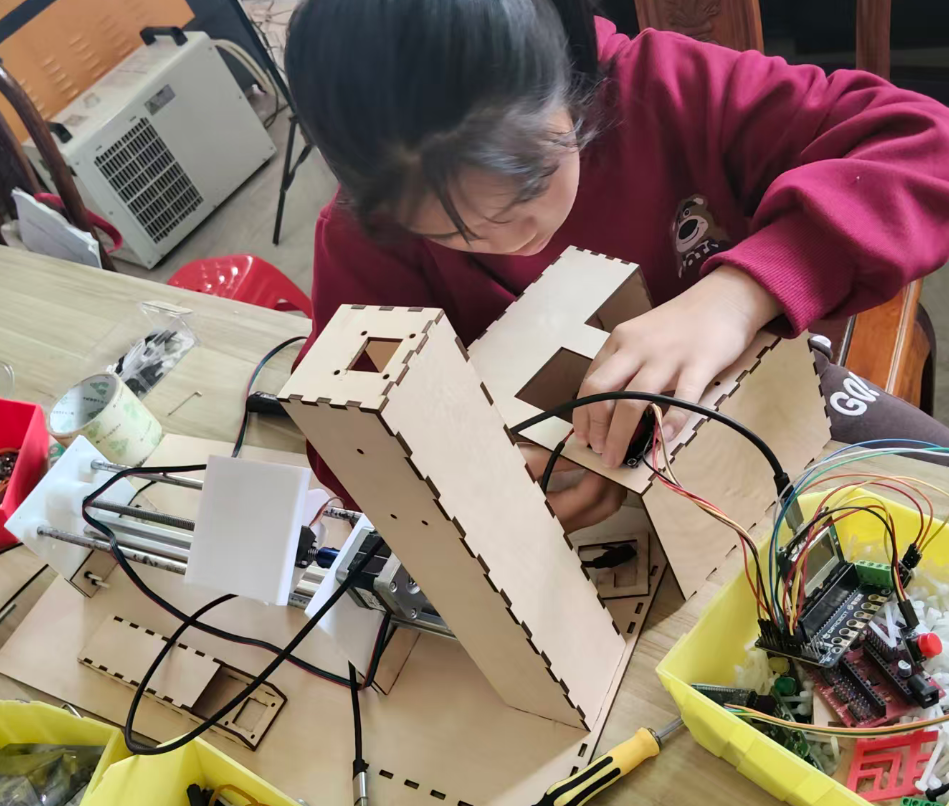
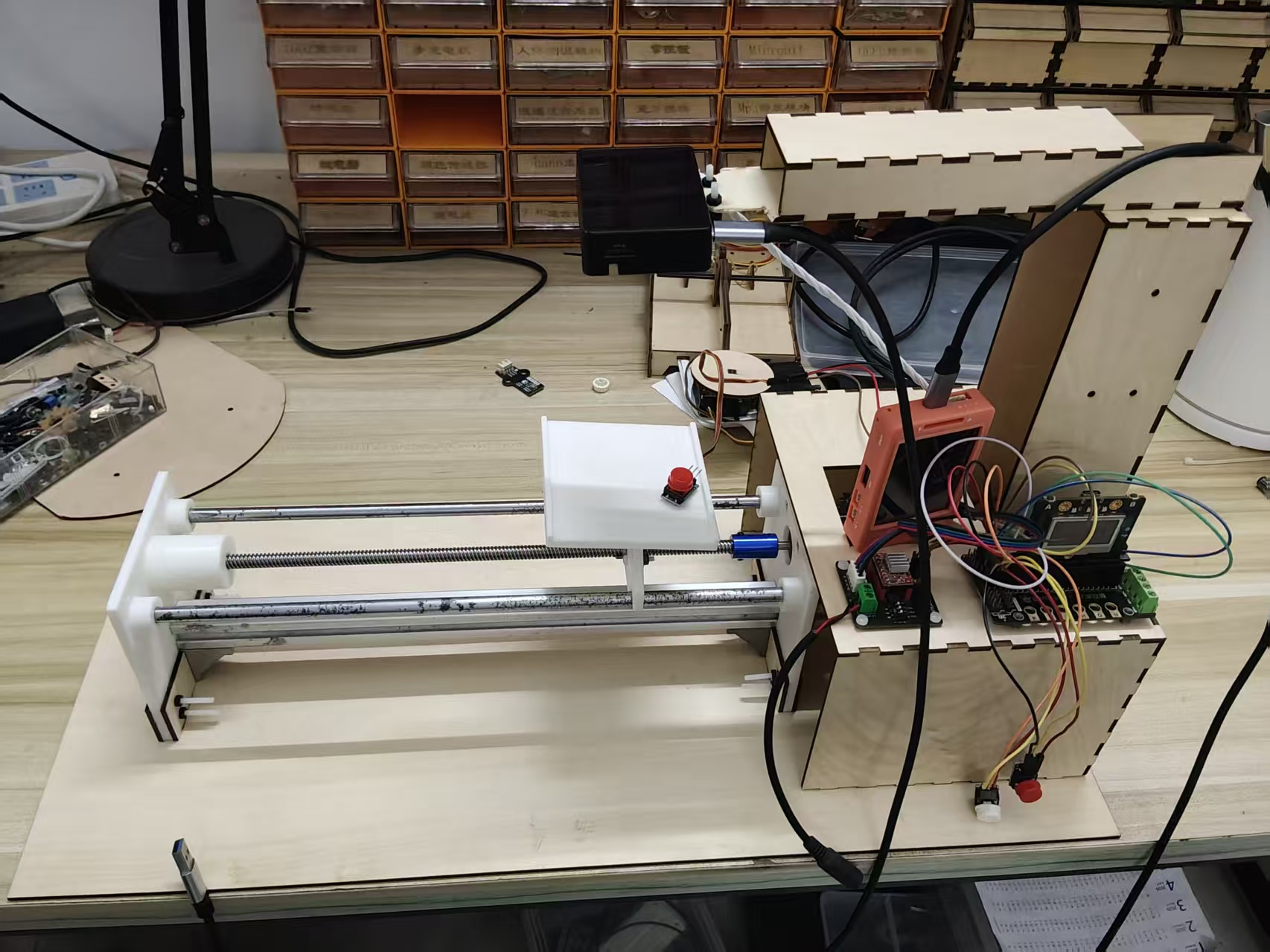
步骤6 最后完成作品机械结构,如下图所示。
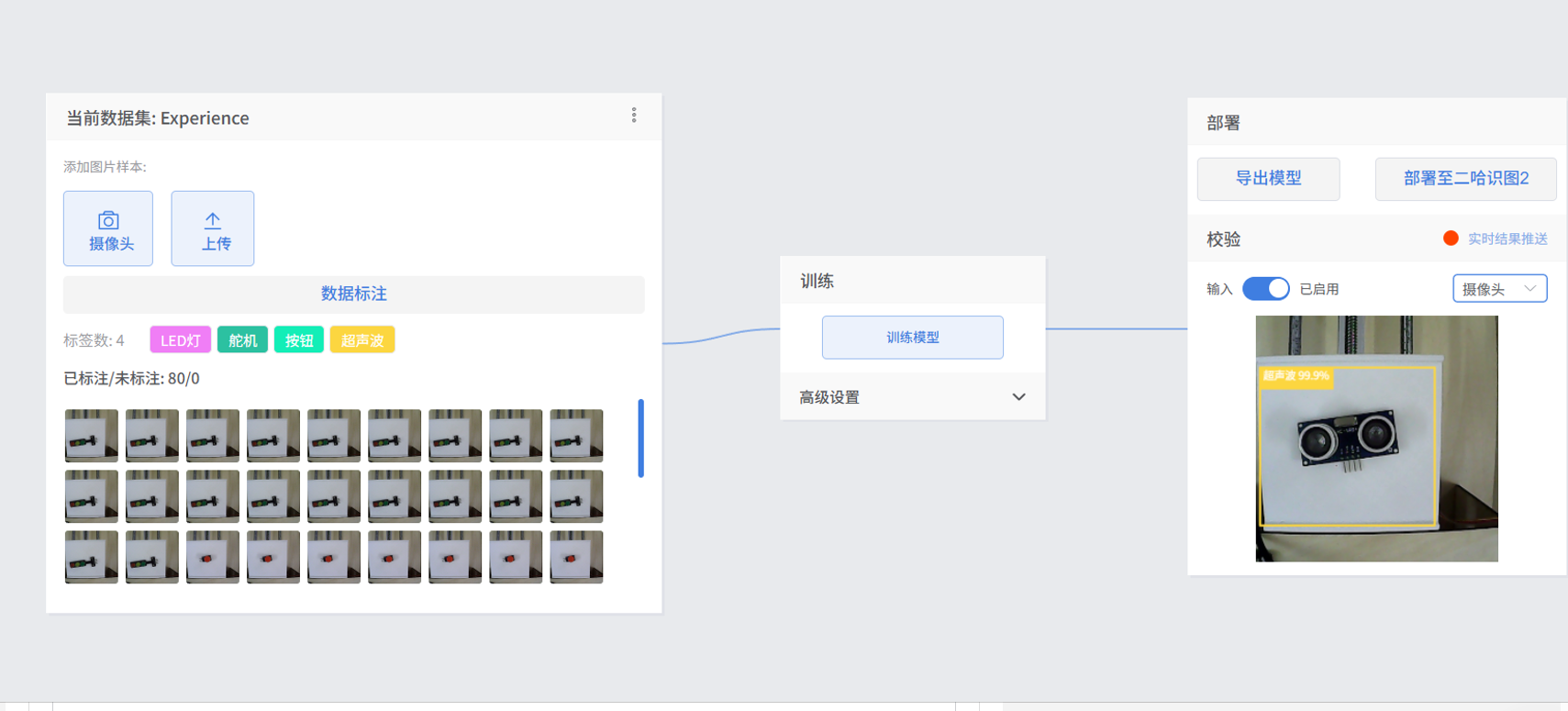
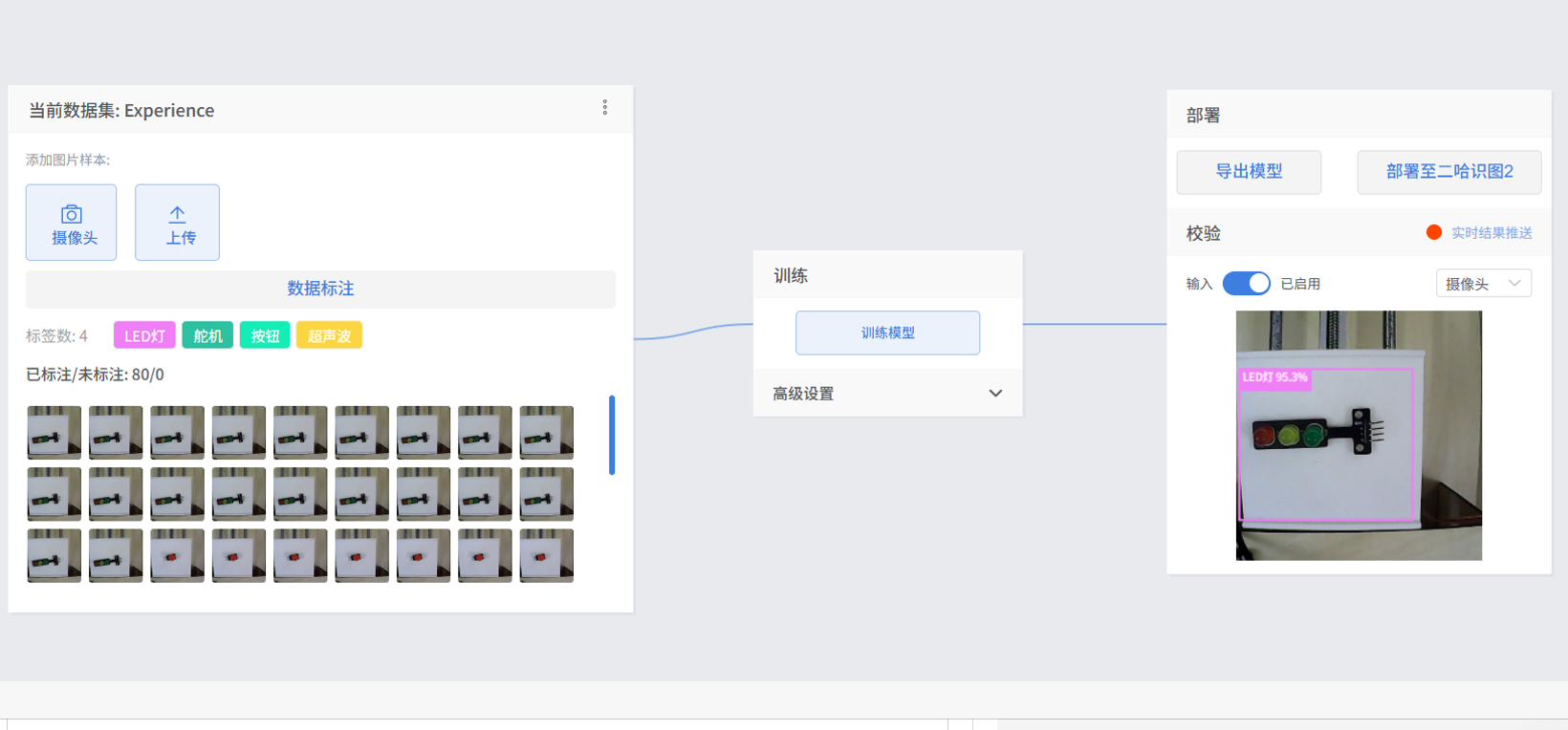
步骤7 利用Mind+2.0里面的目标检测功能拍摄和训练模型。
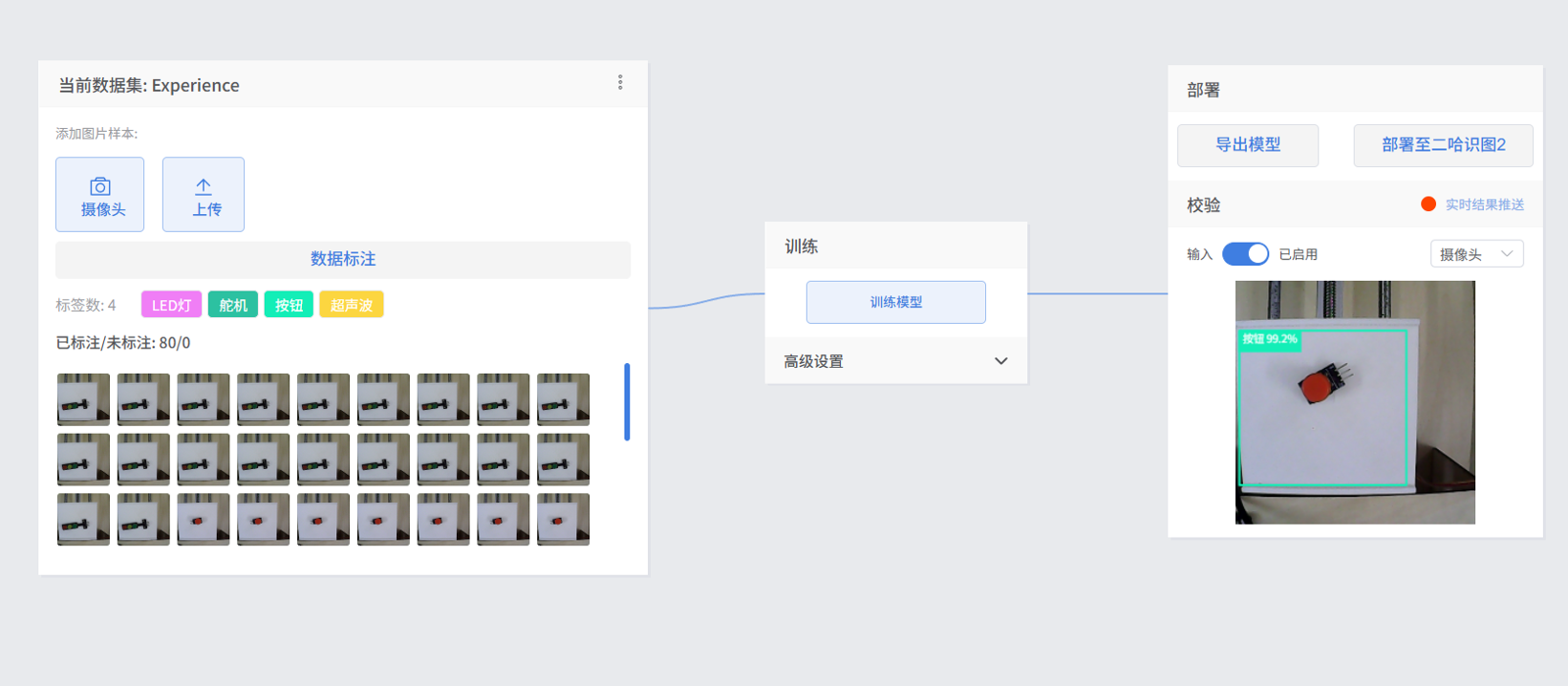
步骤8 训练模型结构如下,置信度比较好。
舵机模型达百分之九十以上
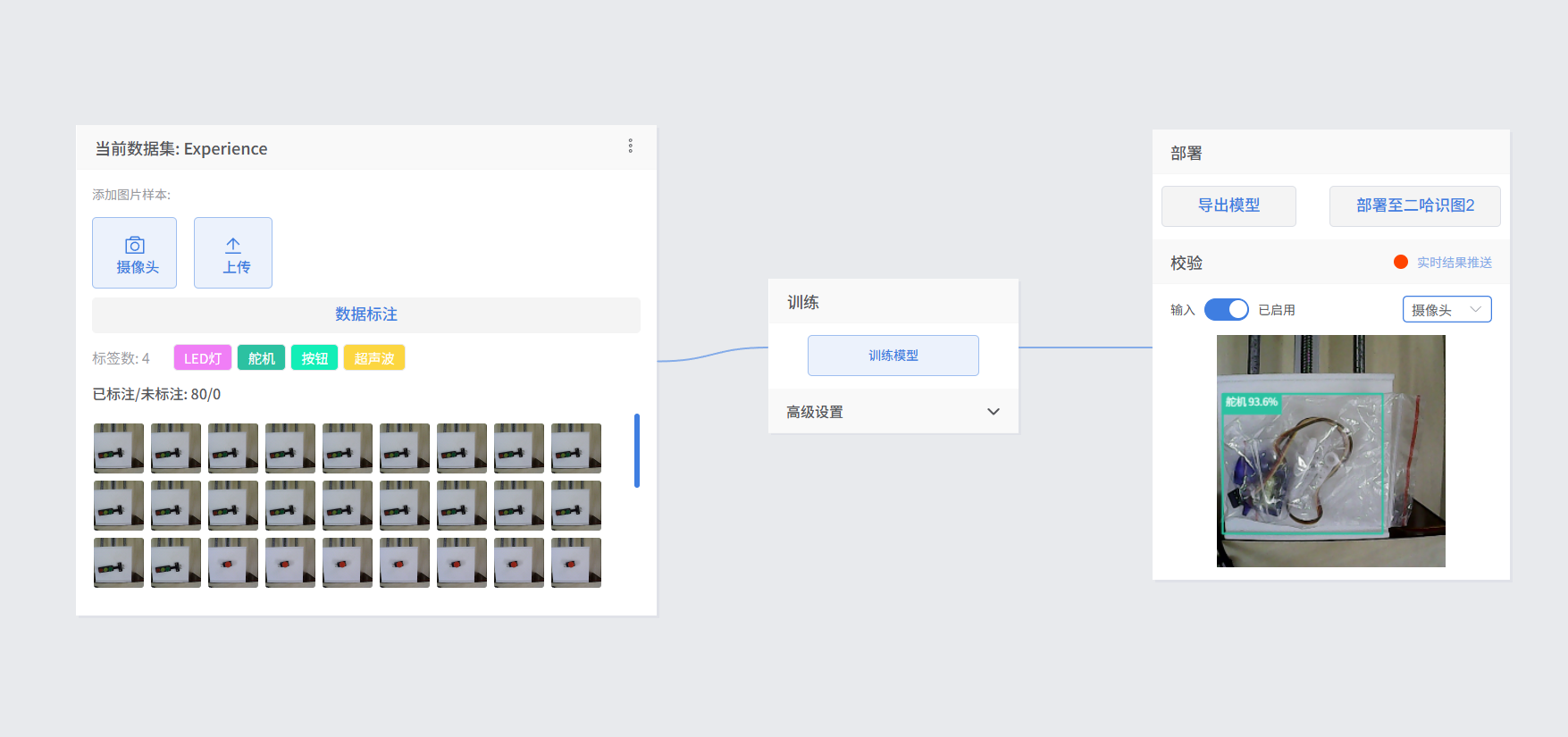
步骤9 将训练好的模型导出,并下载。
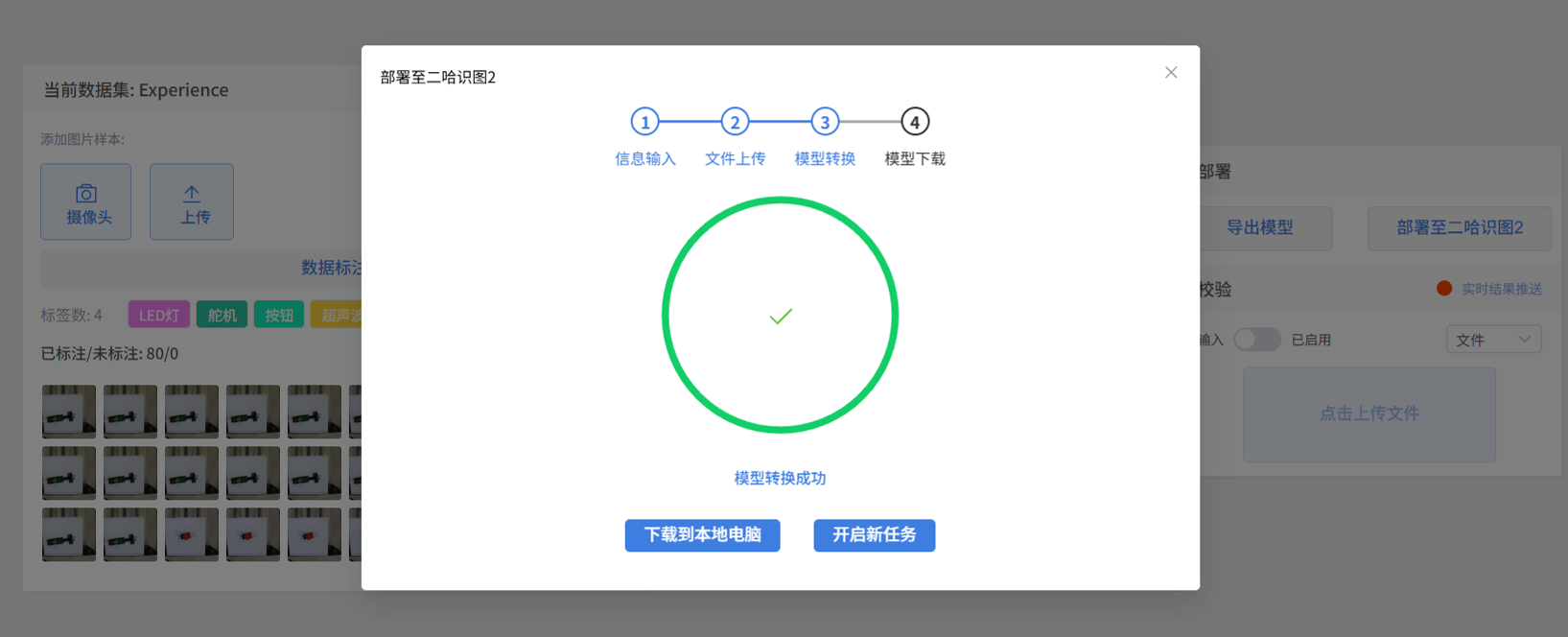
步骤10 将导出的模型部署安装到二哈2上面。
步骤11 用行空板M10搭建siot物联网程序,如如所示。

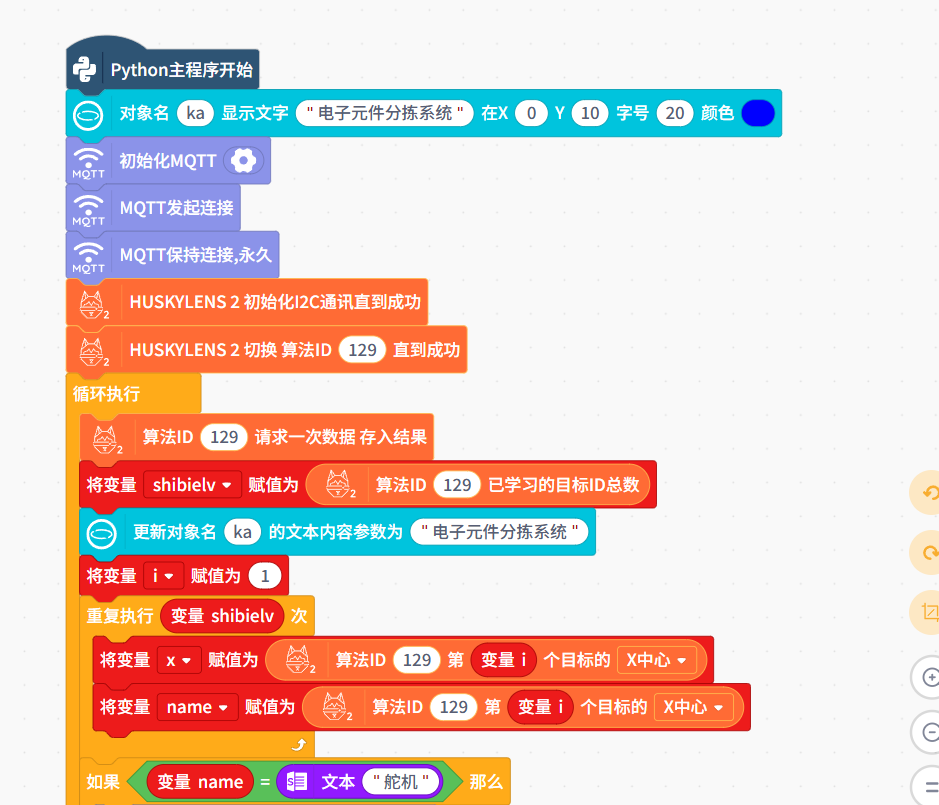
步骤12 编写行空板上面的识别程序,并把识别结果发送到数据管理中心,如下图所示。

步骤13 编写掌控板控制步进电机和舵机程序,程序如下图所示。


步骤14 最终完成效果如下面视频所示,对电子元件进行分类。
步骤15 本次作品完成度还可以,还有很多地方要改进提高,有不足的地方欢迎指正。
步骤16 模型文件和数据集


 他的勋章
他的勋章

评论