 返回首页
返回首页
 回到顶部
回到顶部

在机器人学习领域,机械臂往往是爱好者的“入门拦路虎”——动辄上千元的成品价格,让很多校园社团望而却步。但对技术的热爱从不会被硬件成本限制,我们社团借助仅有的激光切割机、开源图纸与二哈2视觉传感器,打造出了一款兼具学习价值与实用功能的手势智控机械臂。从图纸修改到手势训练,从代码编写到整机调试,每一步都充满挑战与收获,现在就把这份造物经验分享给大家。
一、项目初衷:让机械臂学习触手可及
社团一直想开展机械控制与机器视觉结合的学习项目,恰好申请到了一台二哈2视觉传感器。但核心难题随之而来:配套的机械臂设备预算不足。市面上的入门级机械臂价格普遍在500元以上,且部分功能冗余,并不完全适配教学需求。
既然“买不起”,那就“自己造”。我们梳理出核心需求:结构可加工(适配激光切割机)、控制可实现(基于Arduino生态)、交互够直观(手势控制)。基于此,项目方向逐渐清晰——以开源机械臂图纸为基础进行二次开发,结合二哈2的视觉识别能力,打造一款低成本、高可及性的手势智控机械臂。
二、硬件选型与结构设计:用激光切割实现“量身定制”
硬件方案的核心是“低成本”与“易实现”,我们放弃了复杂的金属结构与高端控制器,选择以亚克力板材为结构主体,Arduino Uno为控制核心,搭配二哈2视觉传感器构建系统。
1. 核心硬件清单
控制单元:Arduino Uno + IO扩展板(稳定驱动多电机)
视觉单元:二哈2视觉传感器(快速识别手势及坐标)
执行单元:7路舵机(分别控制爪开合、水平旋转、垂直俯仰)
结构单元:3mm亚克力板(激光切割加工,轻便且坚固)
辅助单元:舵机由IO扩展板供电(5V3A)、杜邦线、螺丝等
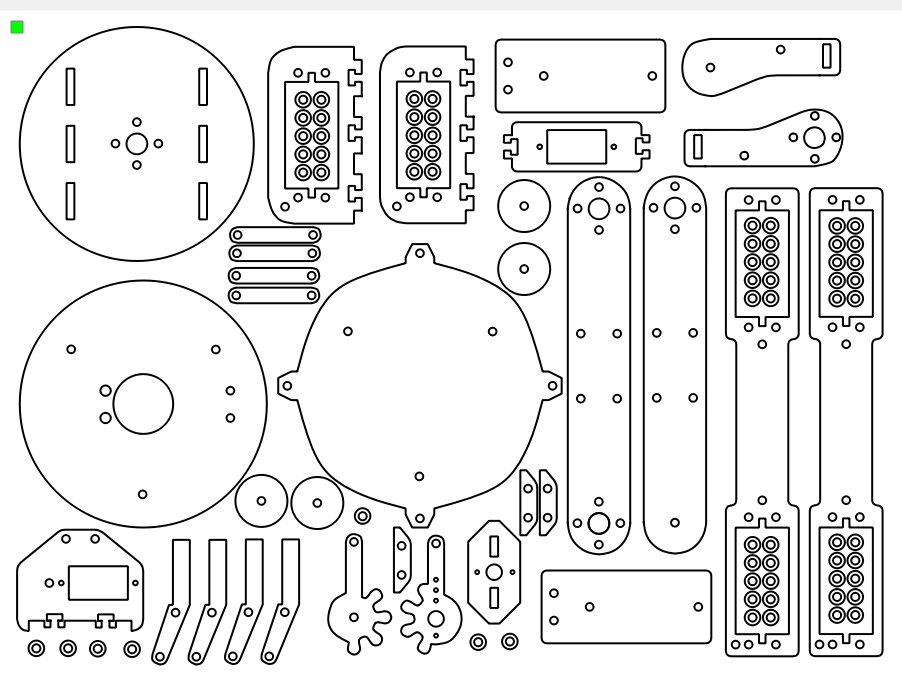
2. 结构优化:开源图纸的“社团适配版”
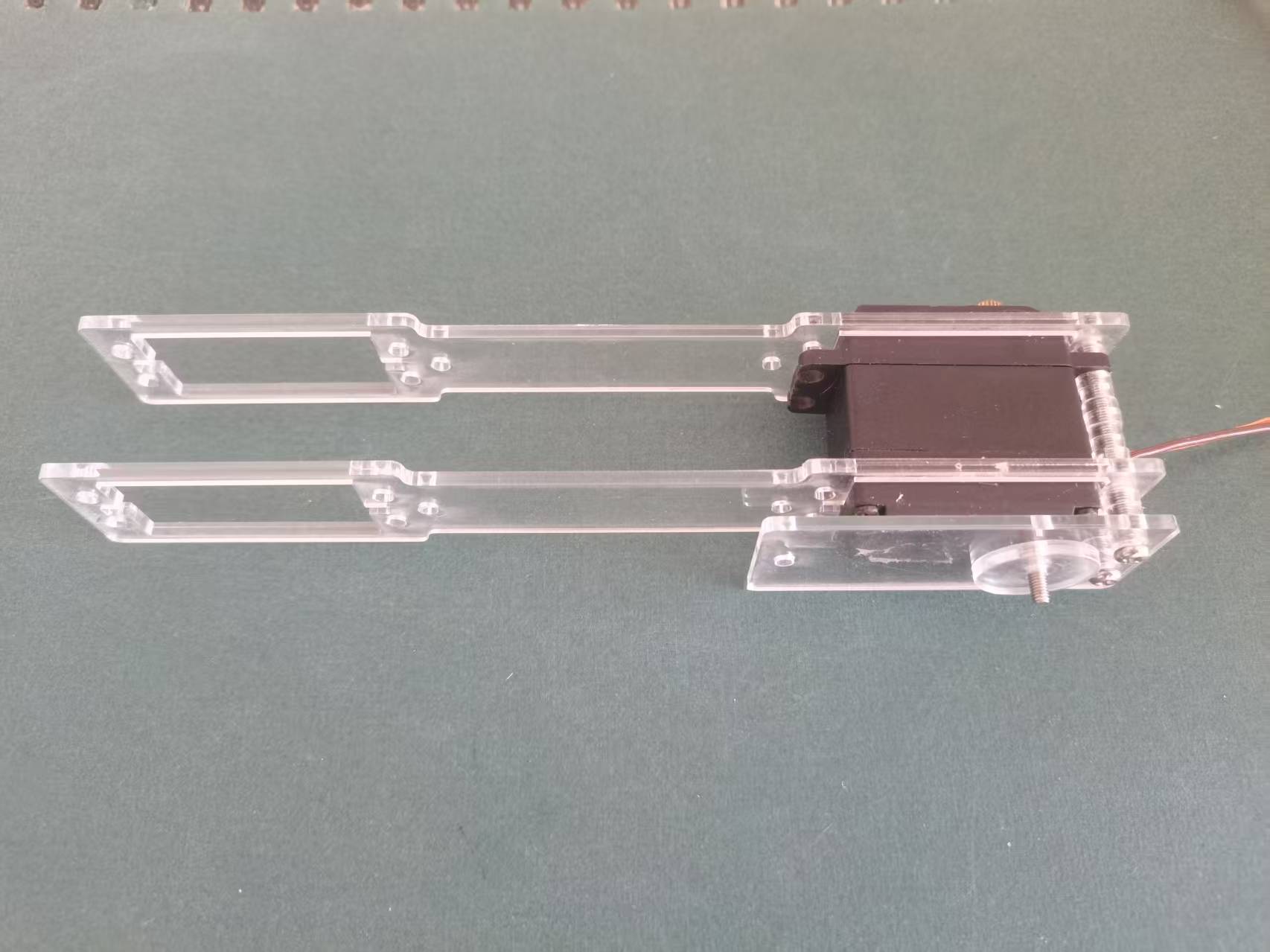
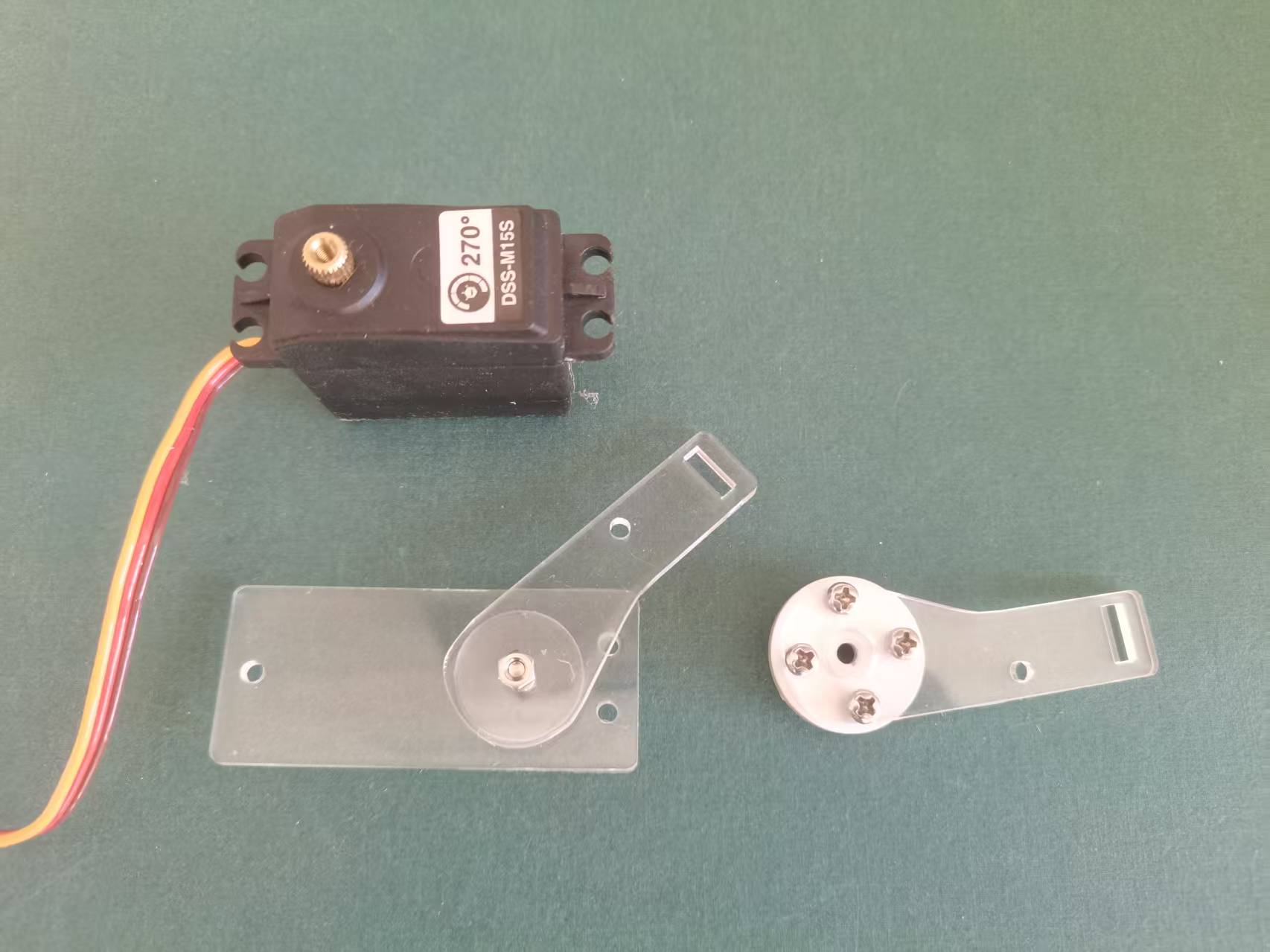
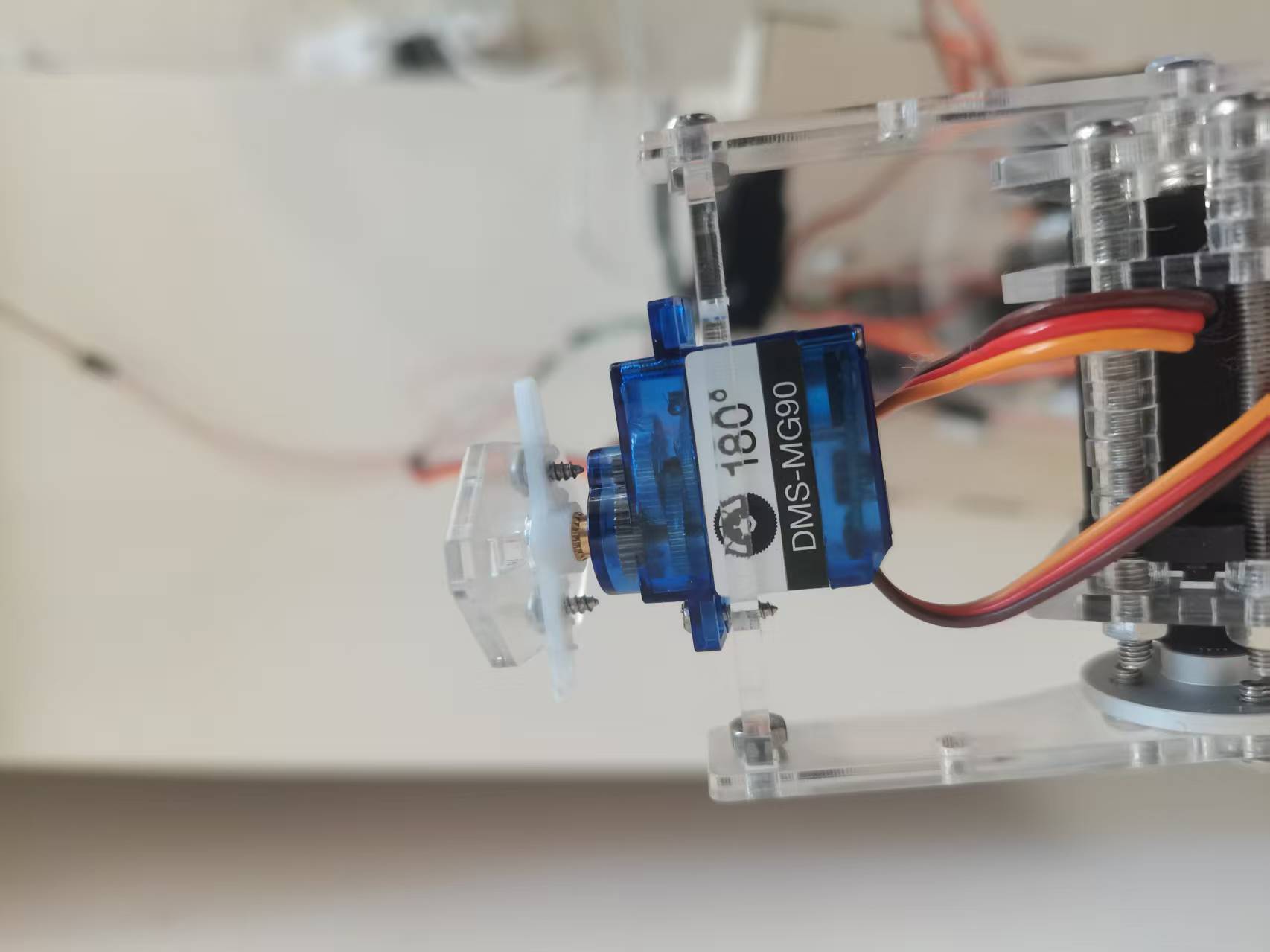
开源社区的基础机械臂图纸为我们提供了绝佳的起点,但实际适配时,我们发现两处明显“水土不服”:一是舵机非驱动轴侧采用纯胶粘固定,长期受力易脱落,稳定性完全无法保障;二是核心连接处依赖传统榫卯结构,而亚克力材质表面光滑,榫卯配合组装容易脱落,牢固性大打折扣。针对这两个核心痛点,我们用LaserMaker 2.0软件完成了精准优化,从“临时固定”升级为“结构稳定”。
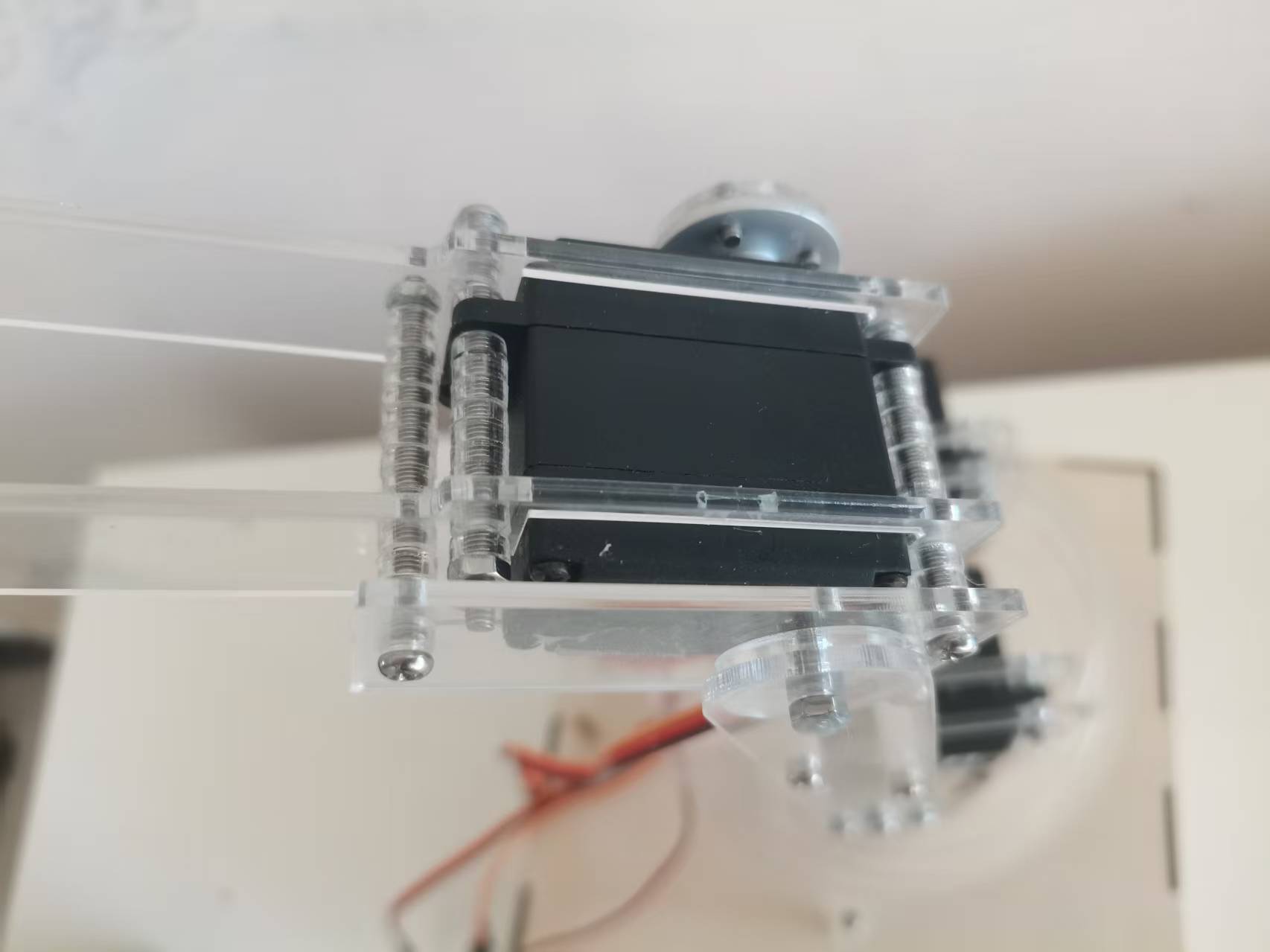
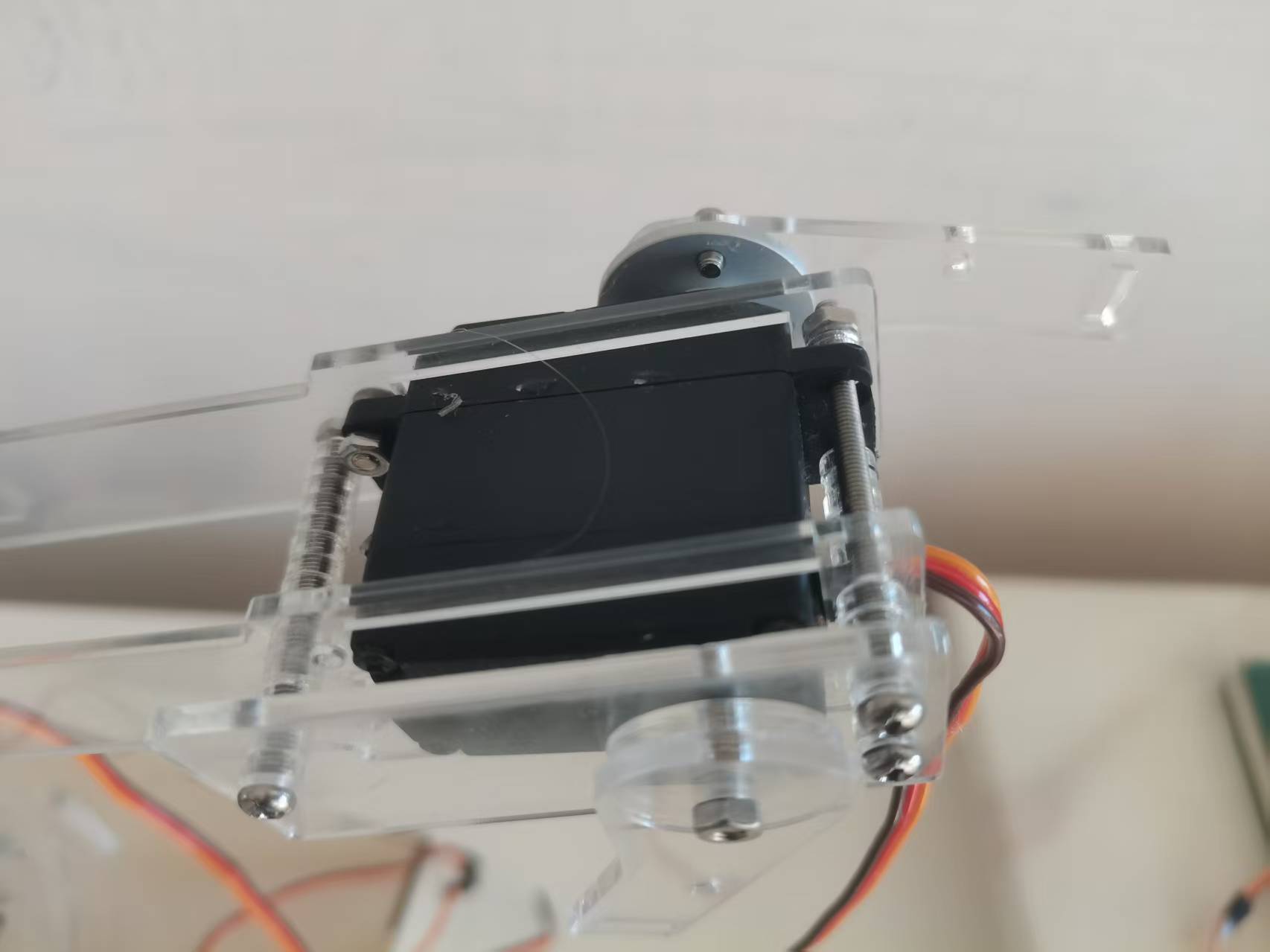
舵机轴系升级:新增定制化固定部件,将舵机非驱动轴从“胶粘悬浮”改为“可旋转固定”,既不影响舵机转动精度,又通过机械结构锁定位置,彻底解决脱落问题;
连接结构强化:重新设计榫卯节点,在榫头位置精准切割出螺母卡槽,待榫卯完全对接后, 通过螺栓穿入锁紧,让亚克力部件间形成“机械咬合+螺栓固定”的双重保障,牢固性提升数倍。
优化后的图纸完美匹配社团激光切割机的加工范围,3mm亚克力板切割出的零件尺寸精准,边缘光滑无毛刺。组装时,各部件对接顺畅,舵机转动轻盈无卡滞,螺栓固定的连接处即便承受机械臂自身重量也纹丝不动,整体结构稳定性远超预期。(文末附激光切割图纸下载链接)
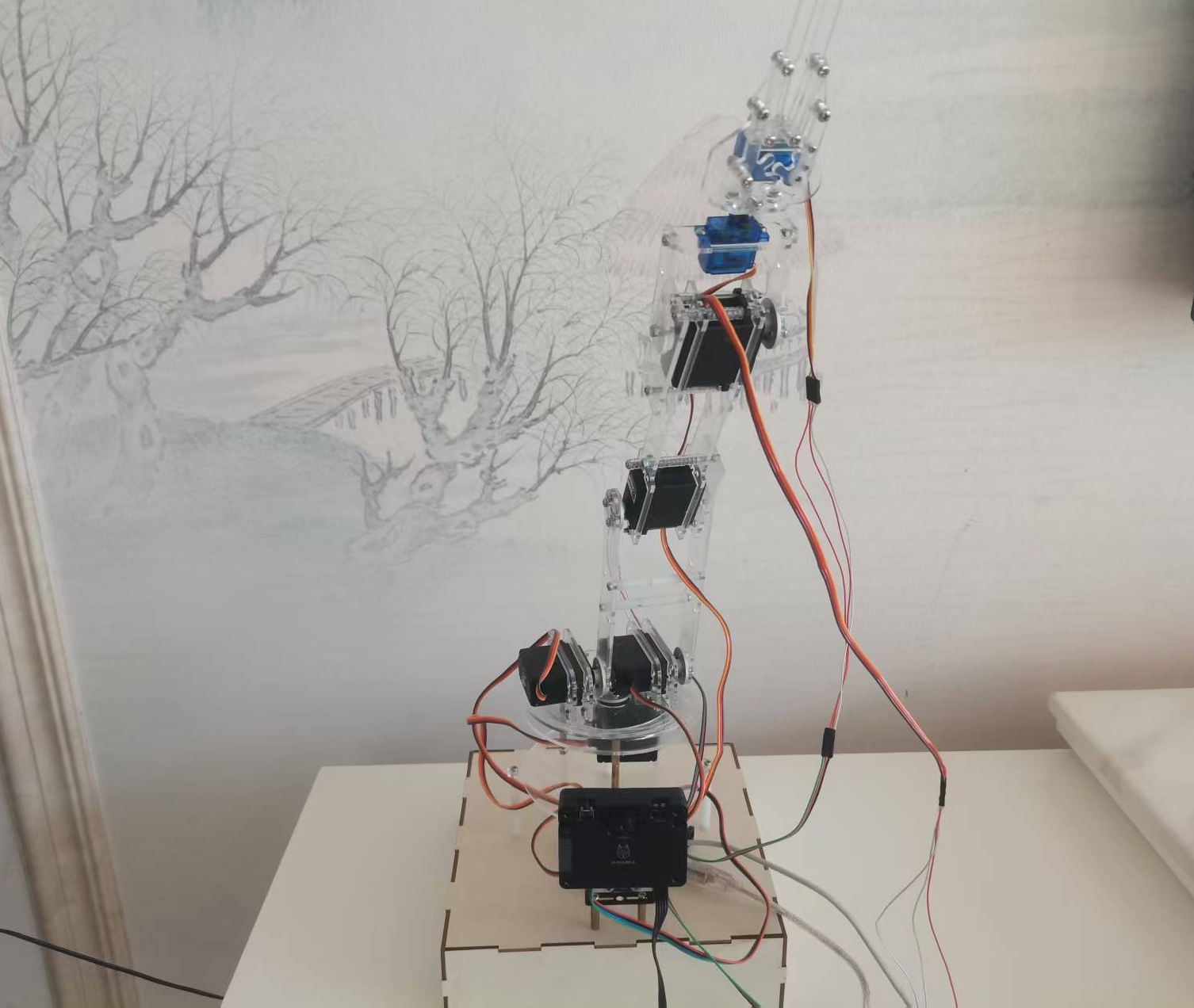
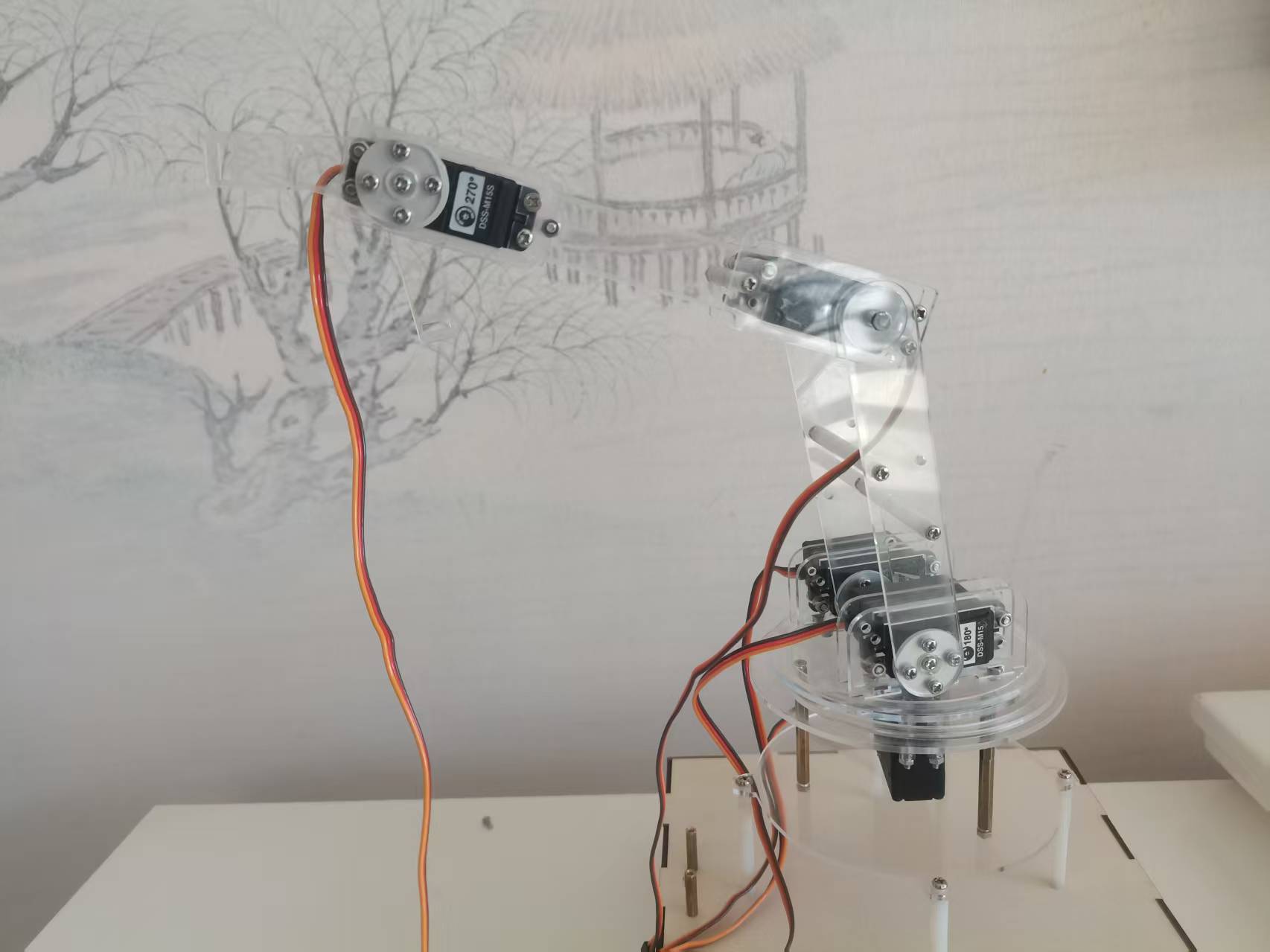
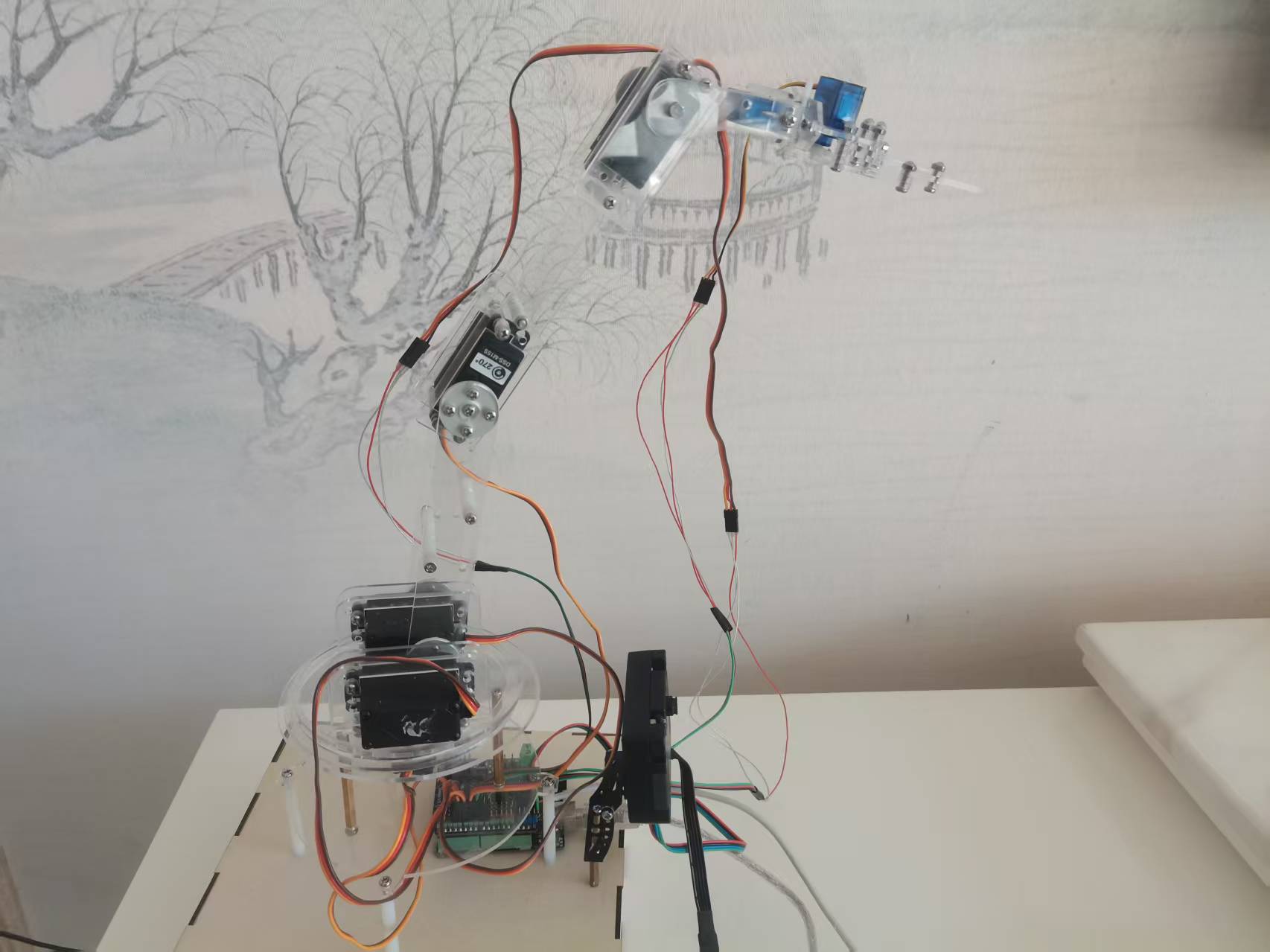
三、组装过程:从零件到整机的“蜕变记”
组装是将设计落地的关键步骤,我们按“底座→旋转关节→俯仰关节→机械爪”的顺序逐步完成,每一步都拍摄了清晰的照片,方便大家参考:
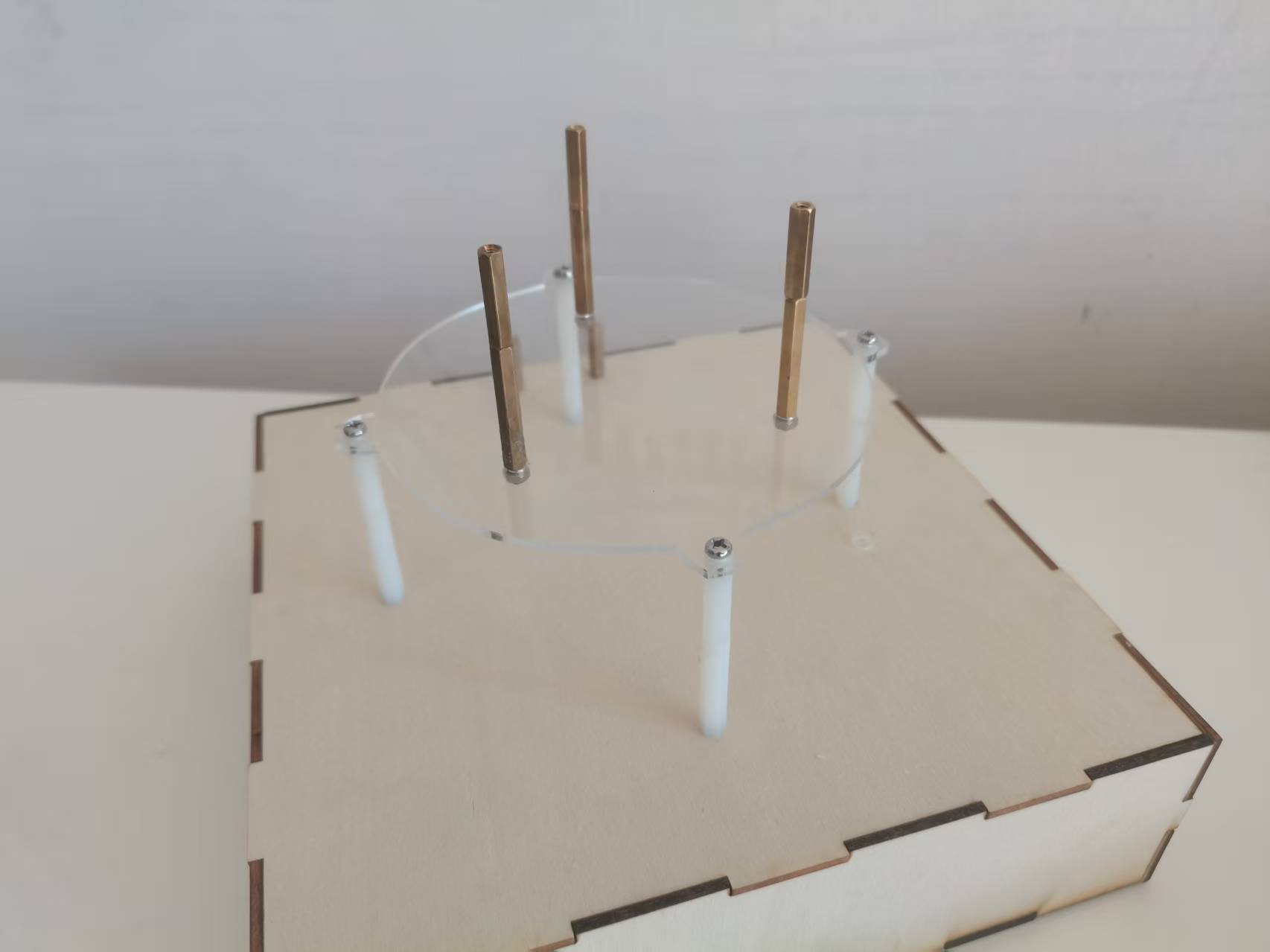
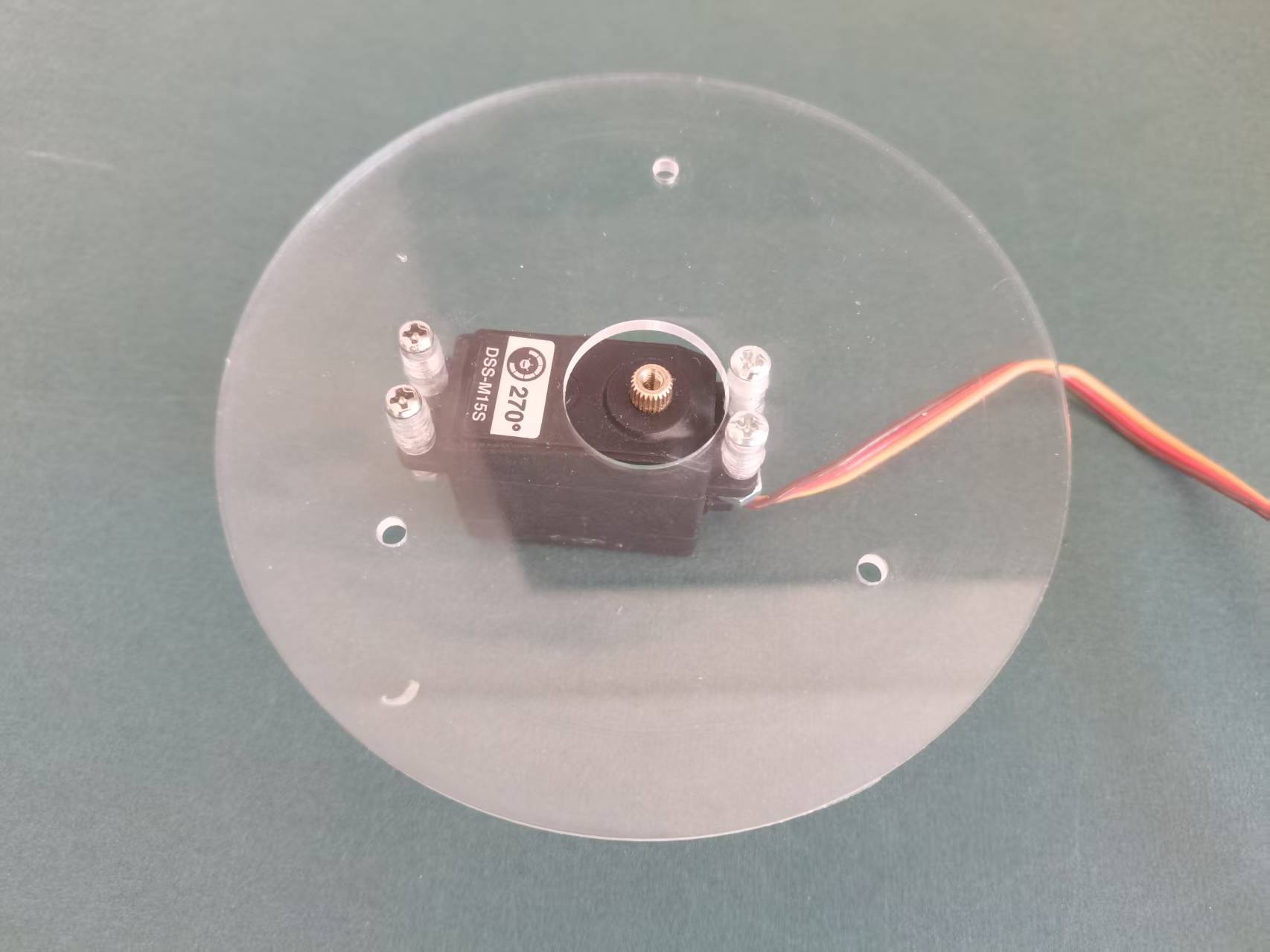
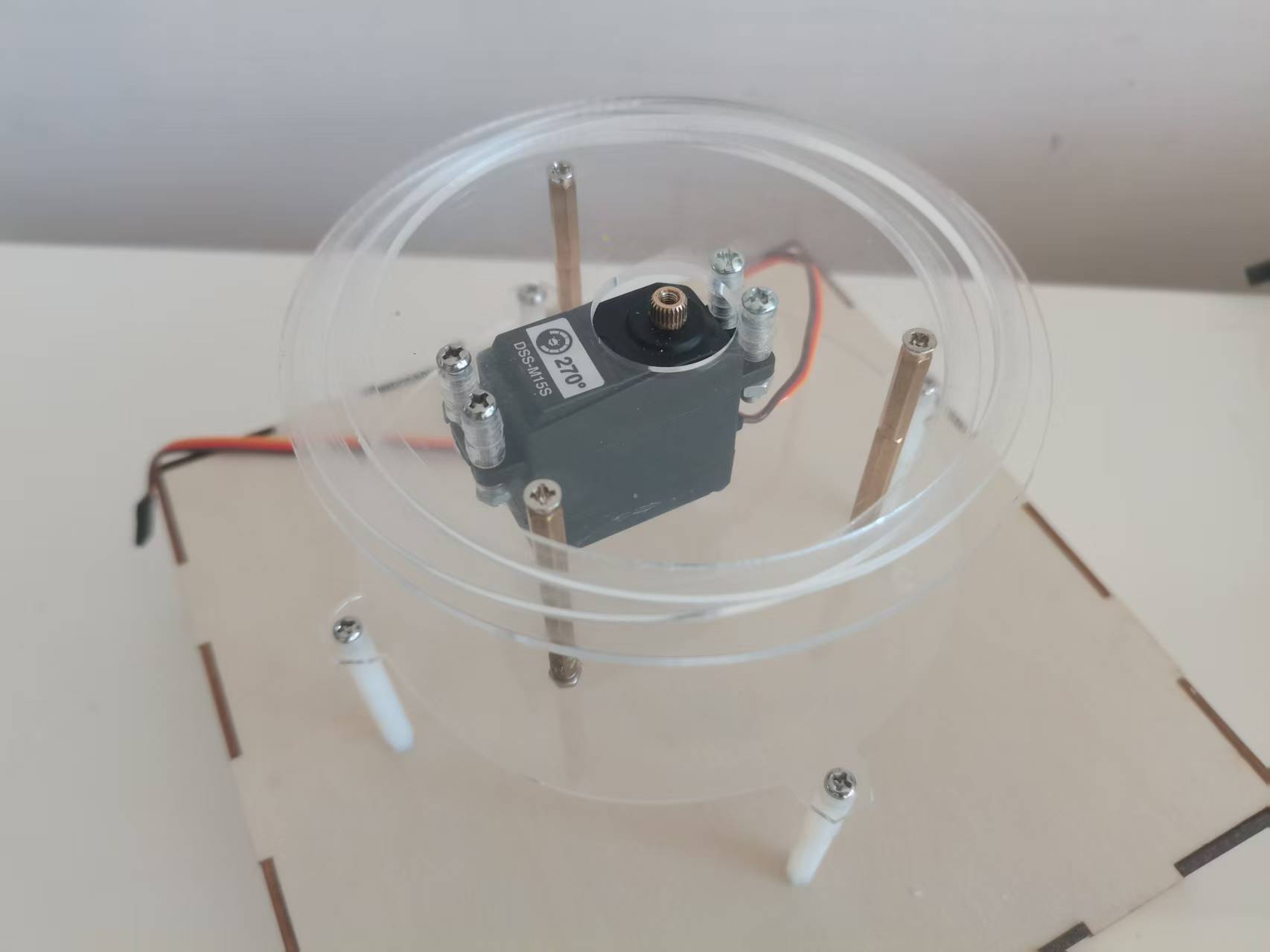
1.底座与水平旋转模块组装
先将舵机固定在底座的舵机座上,注意舵机的输出轴要与旋转支架的中心对齐,然后用螺丝将旋转支架与舵机输出轴锁紧。这一步要确保旋转支架转动顺畅,无卡顿现象,否则会影响后续的水平旋转精度。组装完成后,可手动转动支架,检查是否有异响或阻力不均的情况。
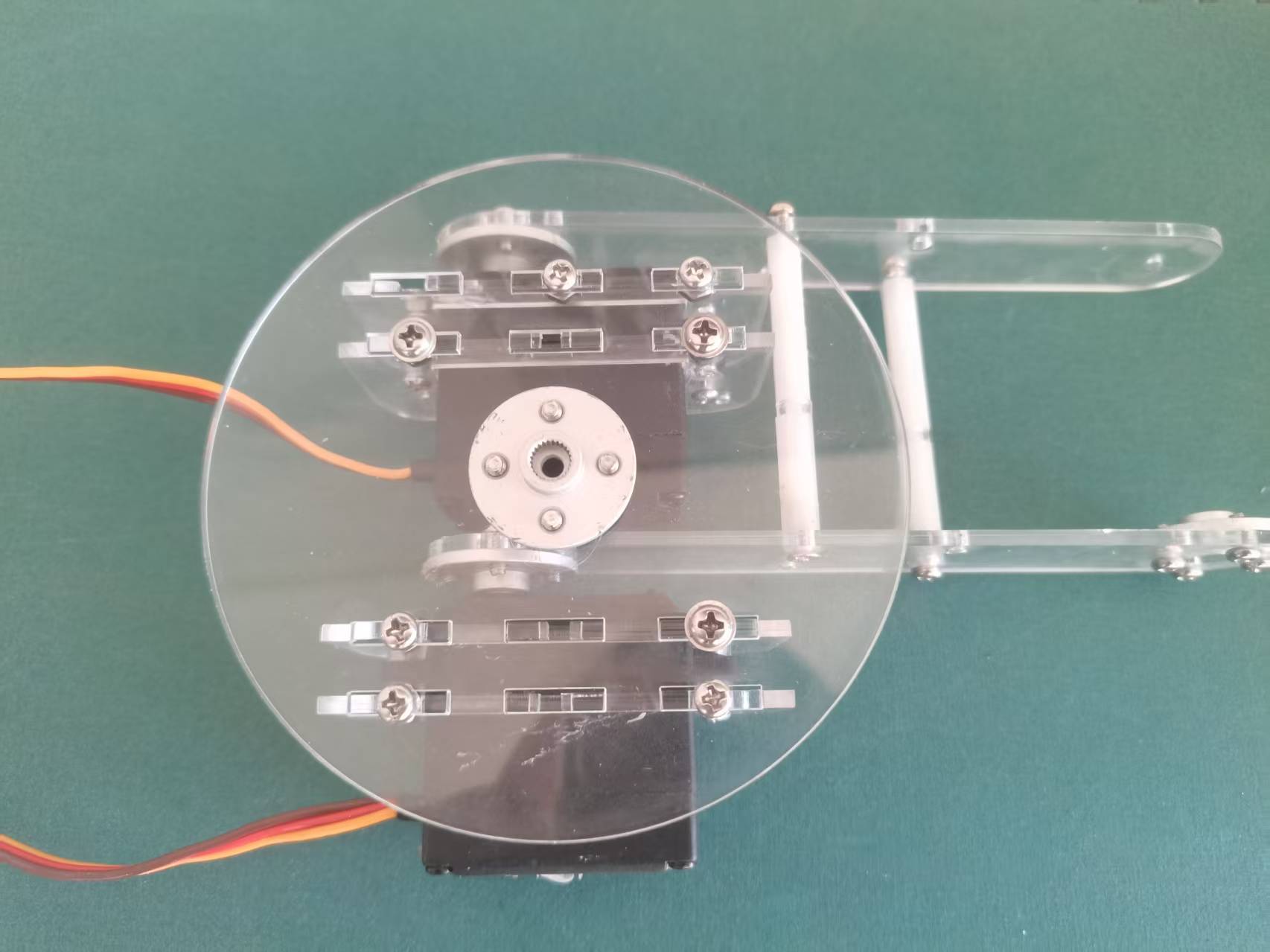
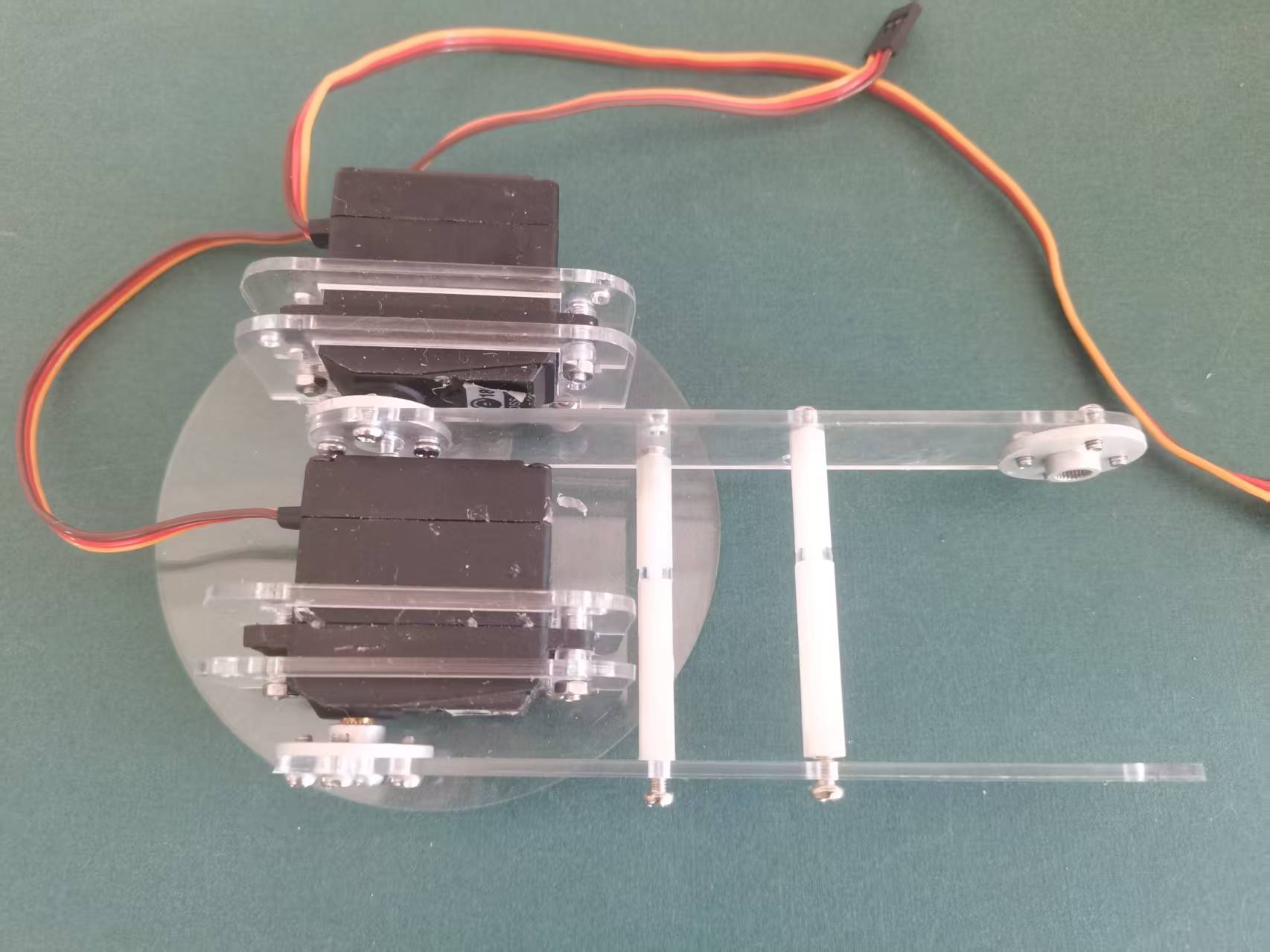
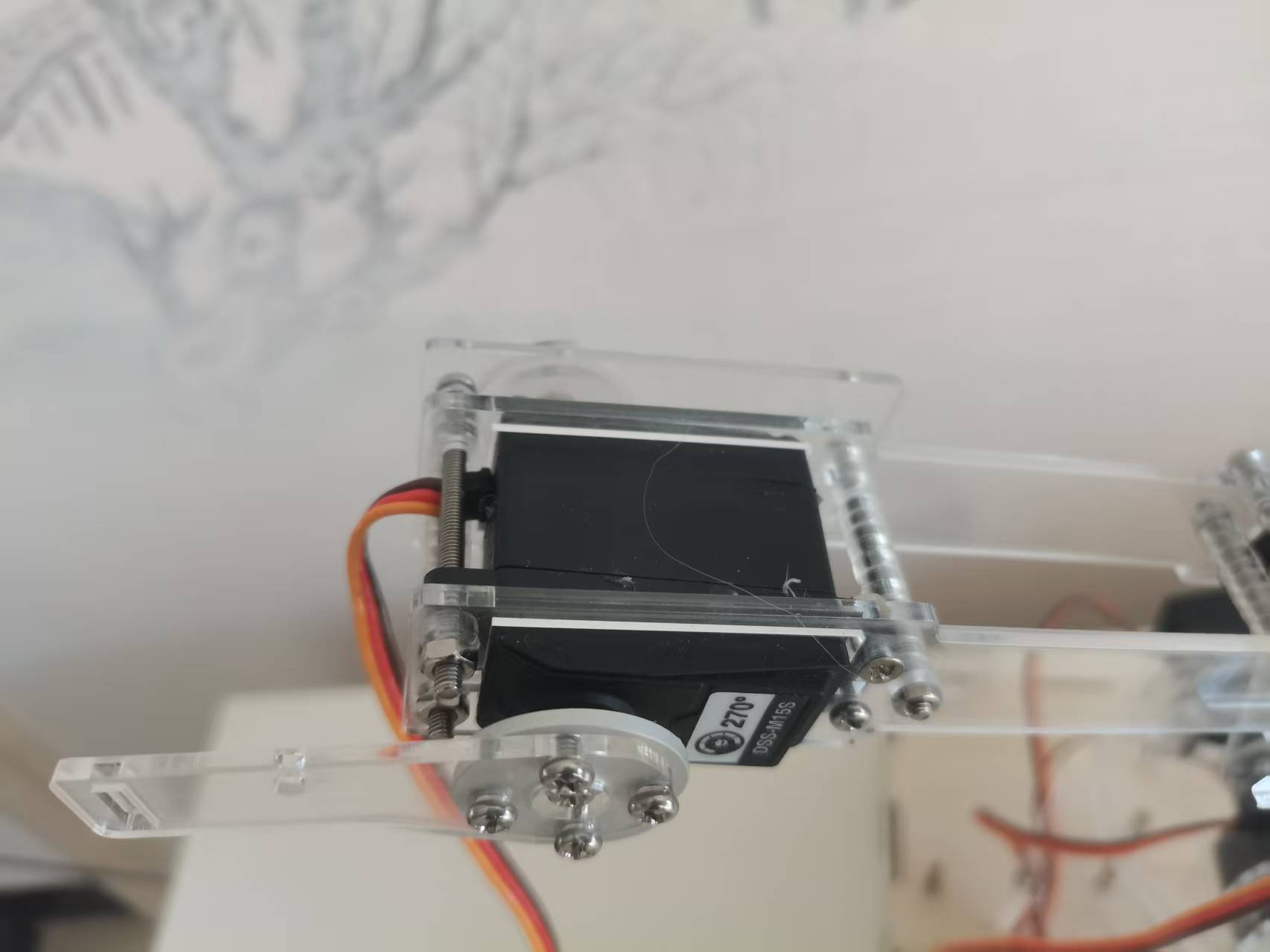
2. 俯仰驱动模块:双舵机动力核心组装
在水平转盘上安装两个同位舵机,注意两个舵机的输出轴高度保持一致,且间距与机械臂前臂的安装孔精准匹配。这两个舵机是机械臂的“动力核心”,将共同提供足够扭矩驱动上方所有部件的前后旋转。组装后可通电测试舵机同步性,确保两者转动角度一致。


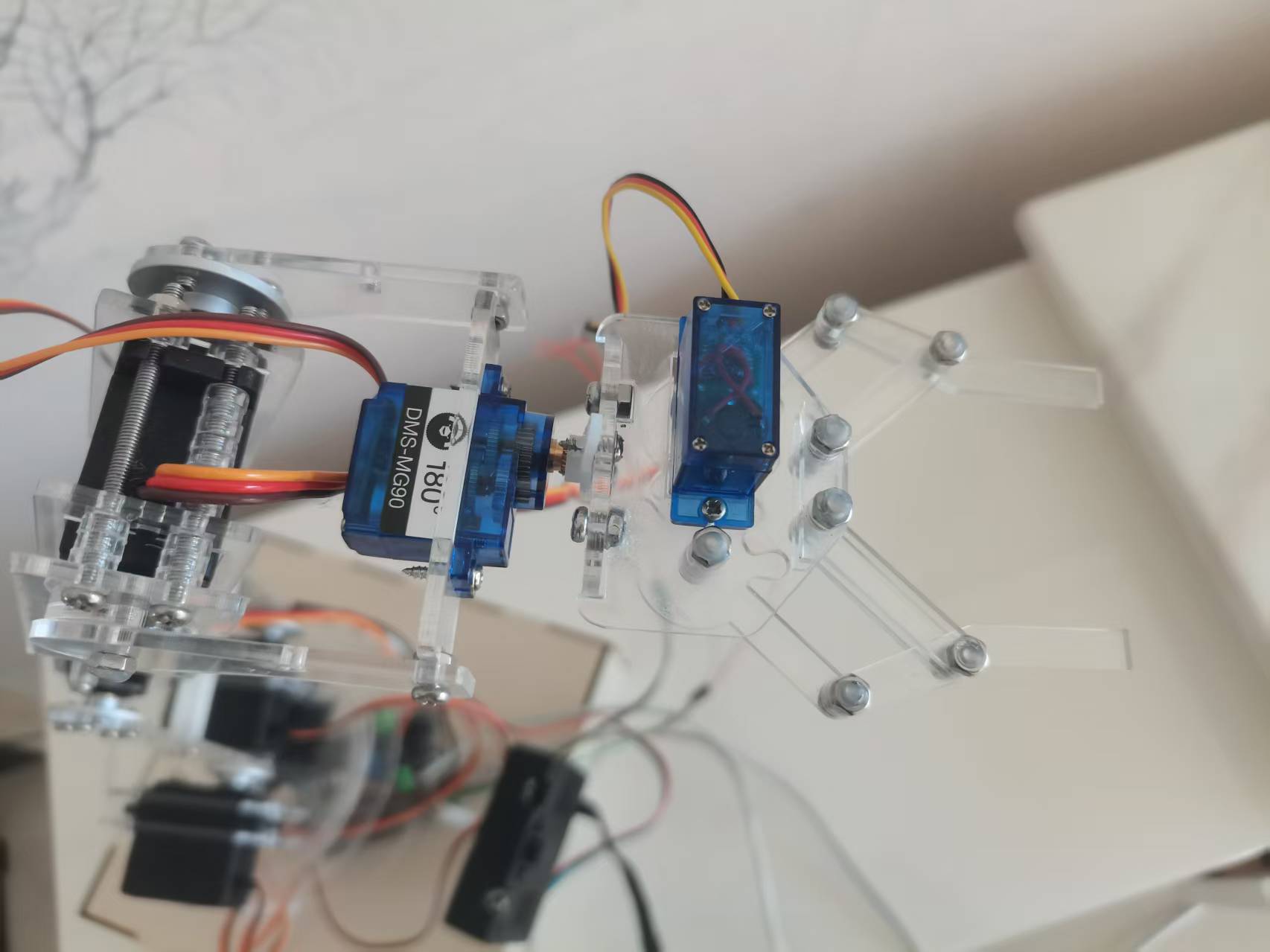
3. 中段俯仰模块组装
第一步完成中段俯仰组装:在双舵机驱动的前臂上方,依次安装两级俯仰舵机。第一级舵机靠近转盘侧,负责机械臂整体的大角度俯仰;
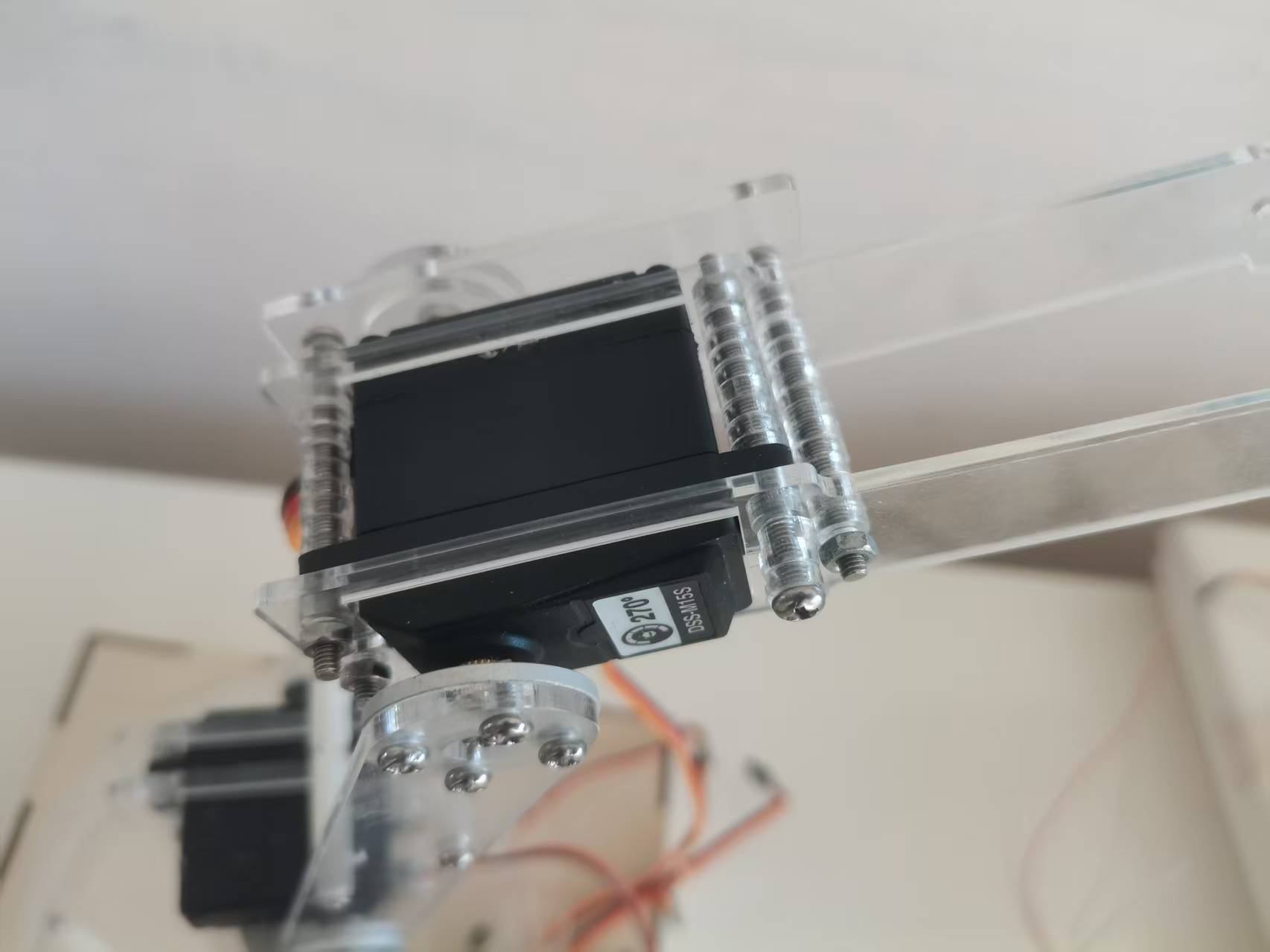
第二级舵机位置更靠近爪部,用于微调爪部的抓取角度,让取物更灵活。
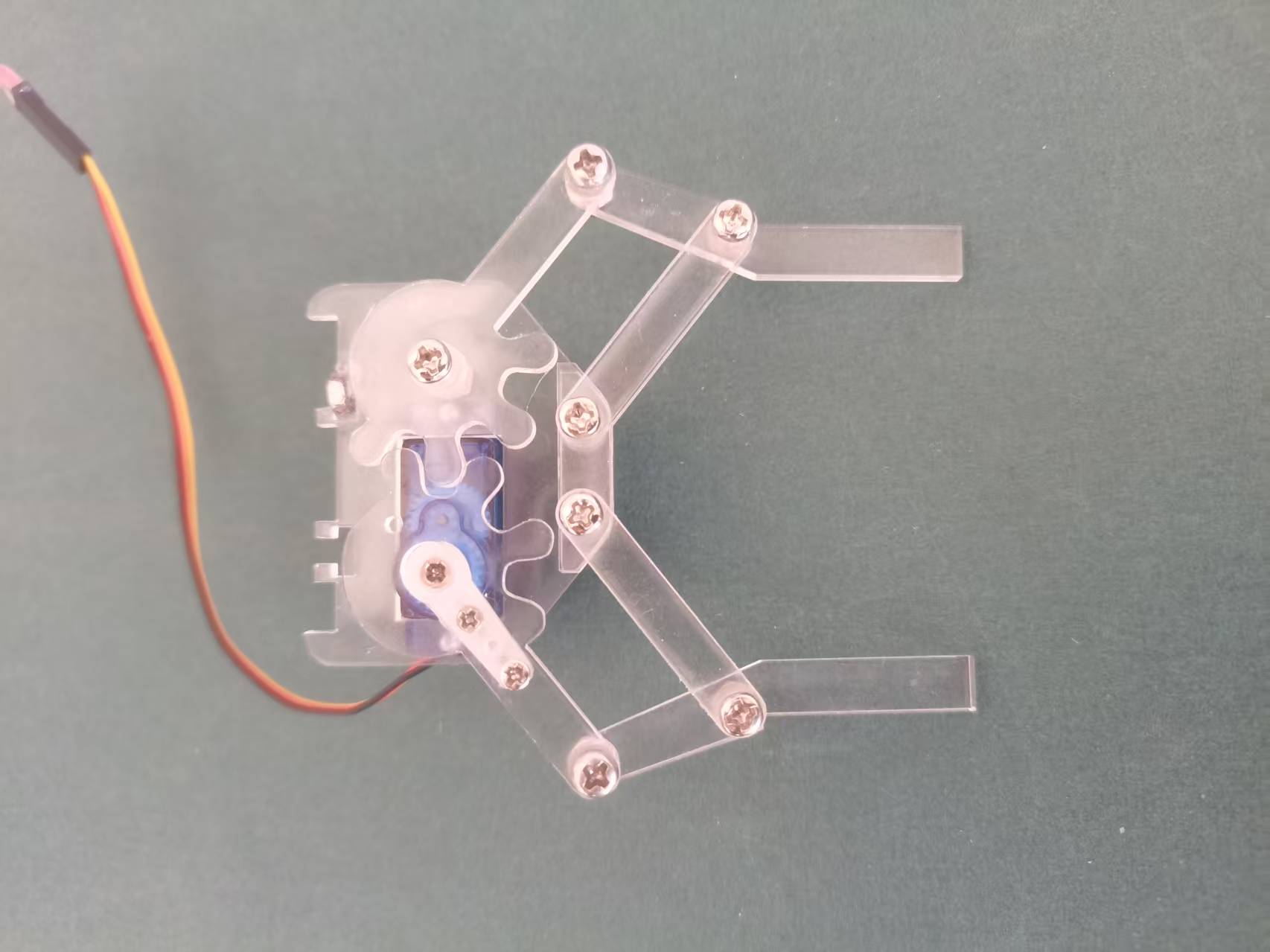
4. 爪部模块组装
进行爪部组装:先将1路9克小舵机固定在机械臂顶端的旋转座上,控制爪部的360°旋转;再在爪片支架上安装另一路9克小舵机,通过齿轮结构连接爪片,实现爪的张开与合并。爪片安装后需调整舵机角度,确保闭合时能夹紧乒乓球,张开时缝隙足够容纳小型物件。

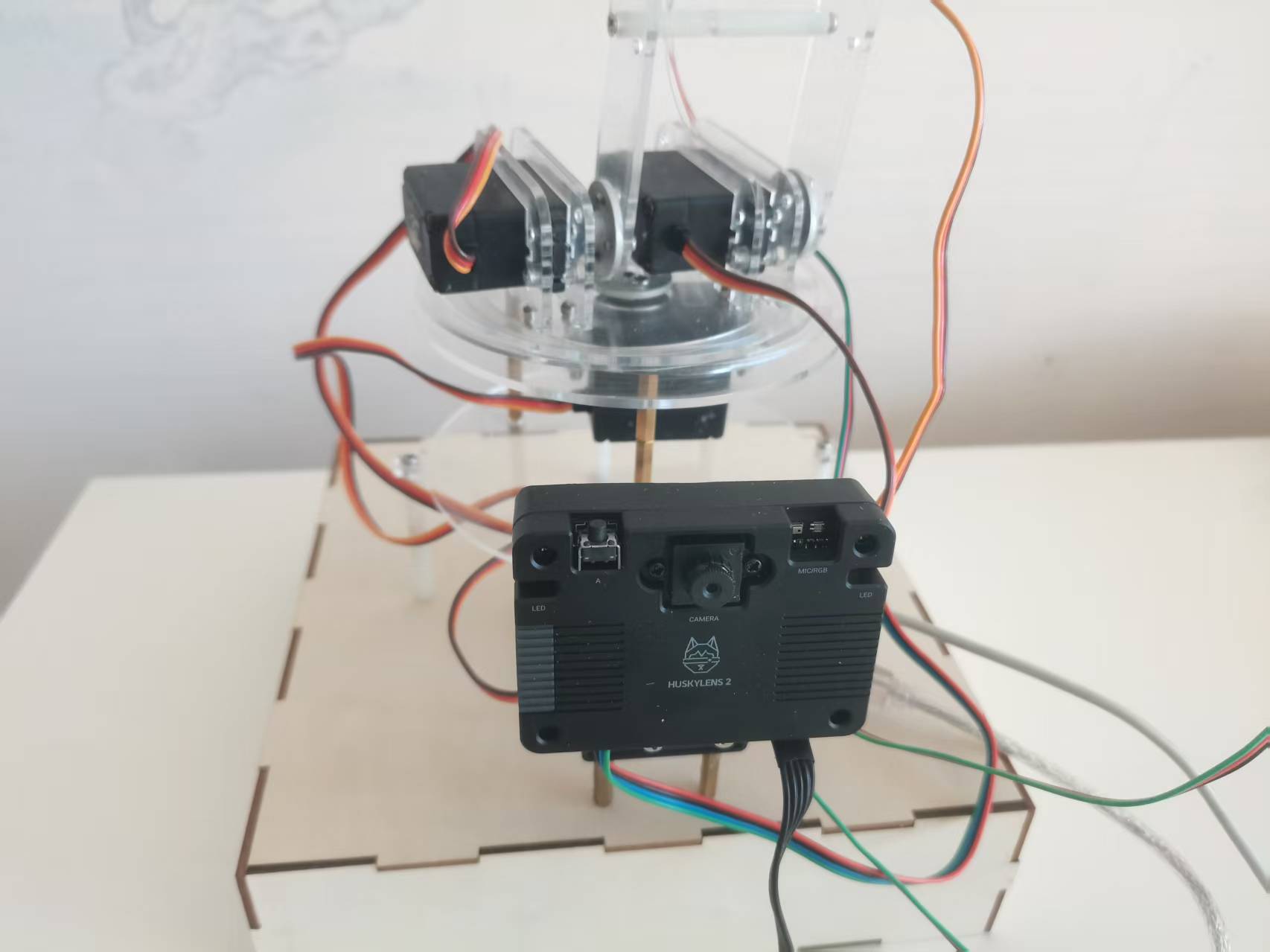
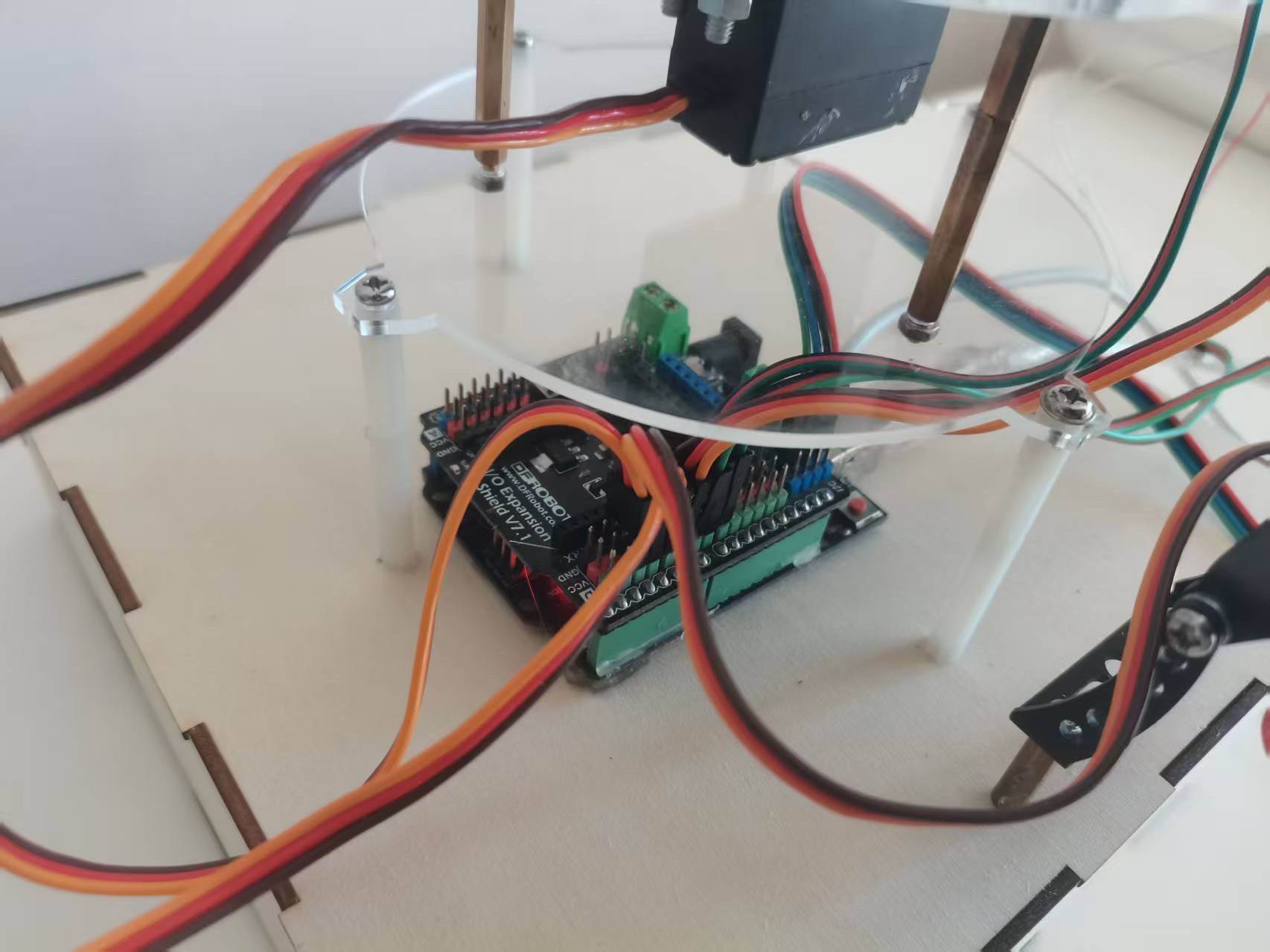
5.安装二哈2视频传感器
6.安装Arduino uno并接线
四、软硬件协同:手势控制的“核心密码”
项目的核心亮点是手势控制,我们通过“二哈2识别手势→Arduino解析指令→舵机执行动作”的流程,实现了直观的人机交互。
1. 手势定义:简单实用的“控制语言”
为了降低手势训练的难度,同时满足基本控制需求,我们定义了4种核心手势及对应的控制功能,结合手势中心点在屏幕上的坐标位置实现精准控制:
| 手势类型 | 控制功能 | 坐标辅助控制 |
|---|---|---|
| 握拳 | 机械爪闭合 | 无(单一动作) |
| 伸开手掌 | 机械爪张开 | 手势中心点上下移动控制旋转方向与角度 |
| 比出“8”字手势 | 水平旋转 | 手势中心点左右移动控制旋转方向与角度 |
| 比出“2”字手势 | 垂直俯仰 | 手势中心点上下移动控制俯仰方向与角度 |
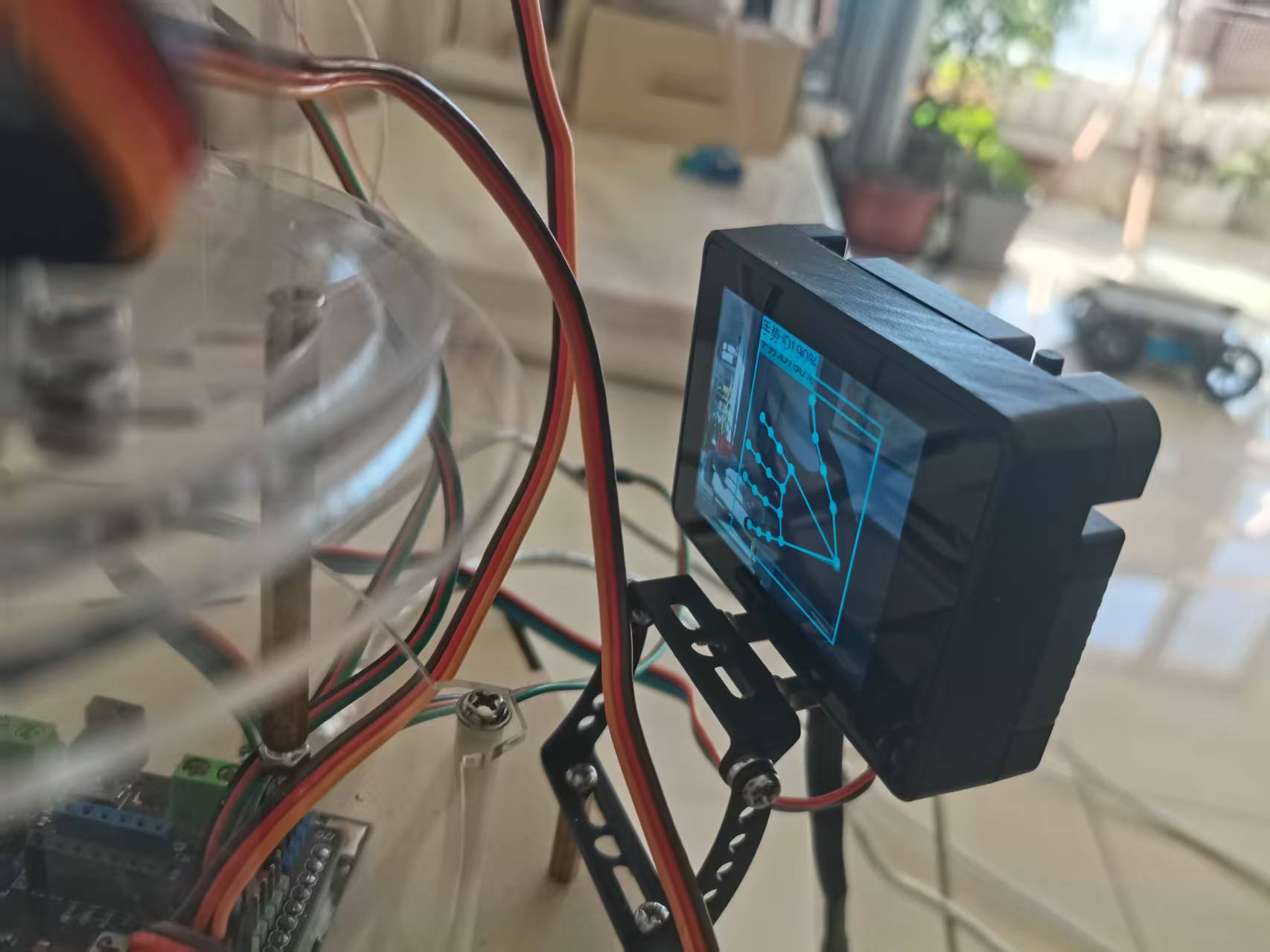
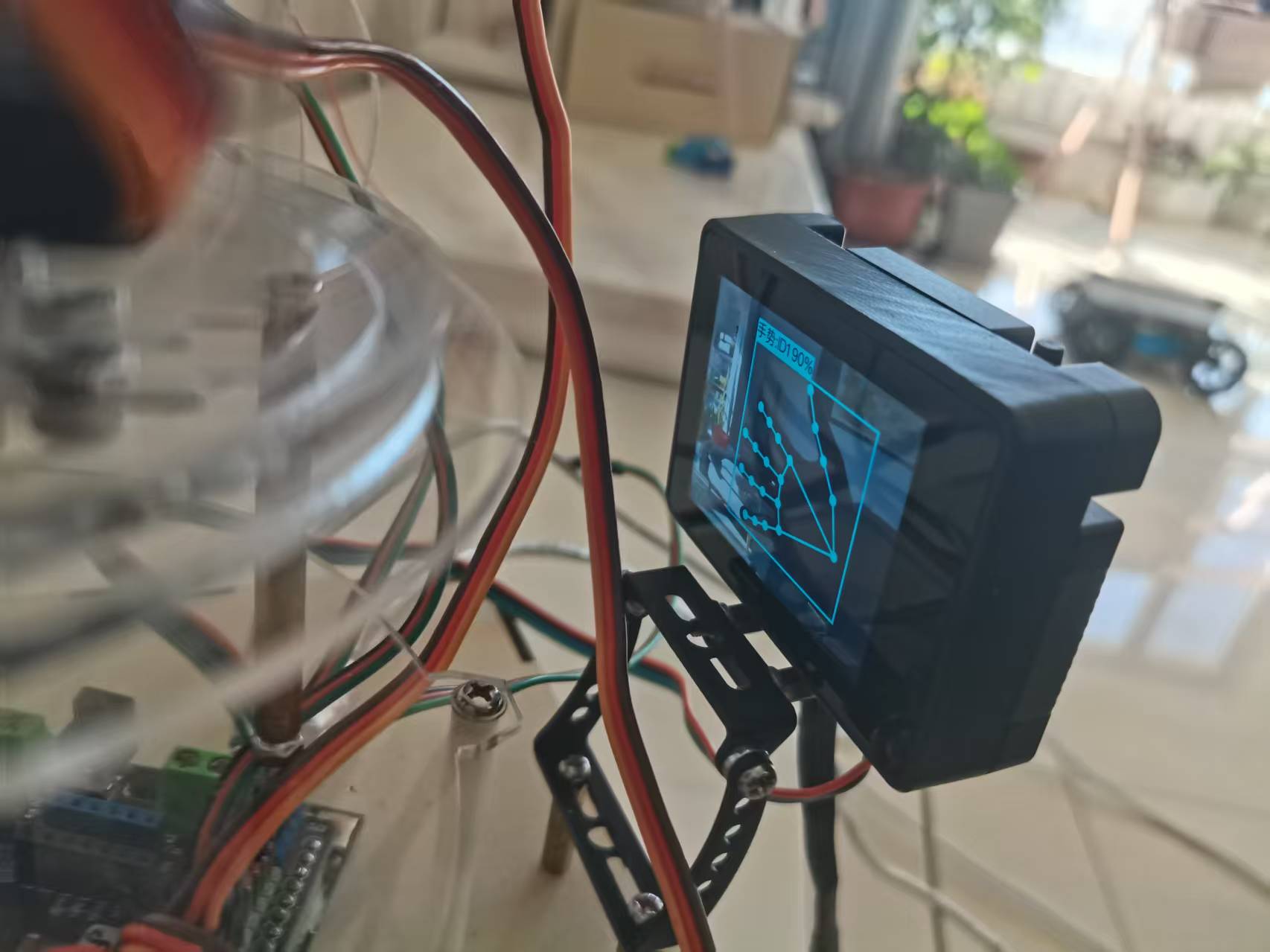
2. 视觉识别:二哈2的“训练与调试”
二哈2视觉传感器的手势识别功能需要提前训练,在二哈2的手势识别界面,使用按键进行学习,按以下步骤完成训练:
将二哈2固定在支架上,调整镜头角度,确保手部在屏幕中清晰显示;
依次录入4种手势,每种手势在不同角度、不同距离下各录入20组样本,提高识别准确率;
“坐标追踪”功能,设置屏幕坐标与机械臂动作的映射关系——例如屏幕左半区对应机械臂向左旋转,右半区对应向右旋转。
训练完成后,二哈2能在0.5秒内识别出手势及坐标位置,识别准确率达到95%以上,基本满足实时控制的需求。

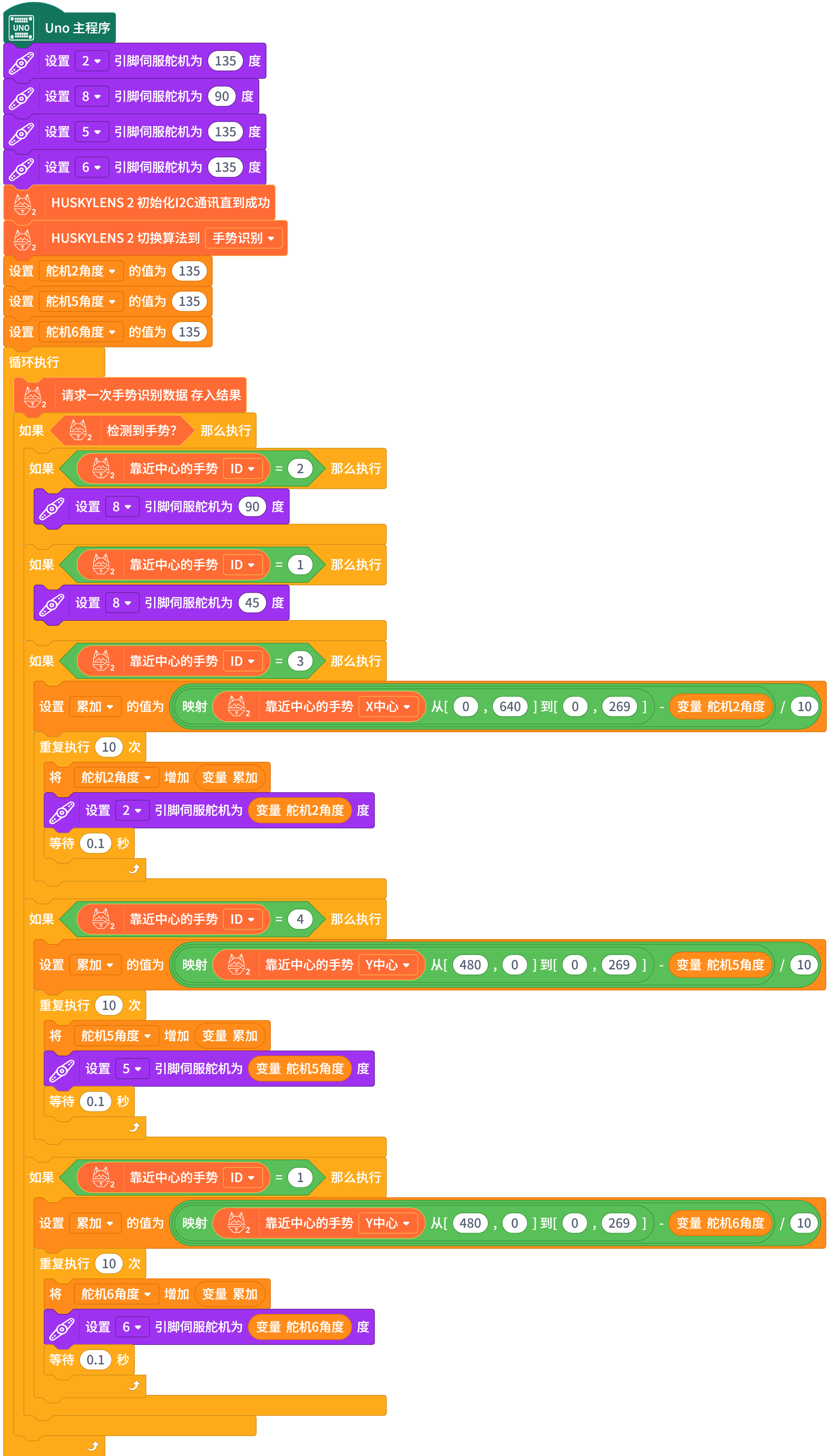
3. 代码编写:Mind+2.0的“图形化高效开发”
考虑到社团成员的编程基础参差不齐,我们选择用Mind+2.0的图形化编程模块编写代码,降低开发门槛。代码核心分为三个部分:
初始化模块:设置舵机的初始角度(机械爪张开、水平居中、垂直水平),配置二哈2的通信参数;
数据接收模块:实时读取二哈2传输的手势类型与中心点坐标数据;
动作执行模块:根据不同的手势类型输出对应的舵机控制信号,例如接收到“握拳”手势时,控制机械爪舵机转动至闭合角度;接收到“8”字手势时,根据坐标X值计算旋转角度并控制舵机转动。
图形化编程的优势在于直观易懂,成员们通过拖拽模块就能完成代码逻辑的调整,例如修改舵机的转动速度时,只需调整“延时”模块的参数即可。
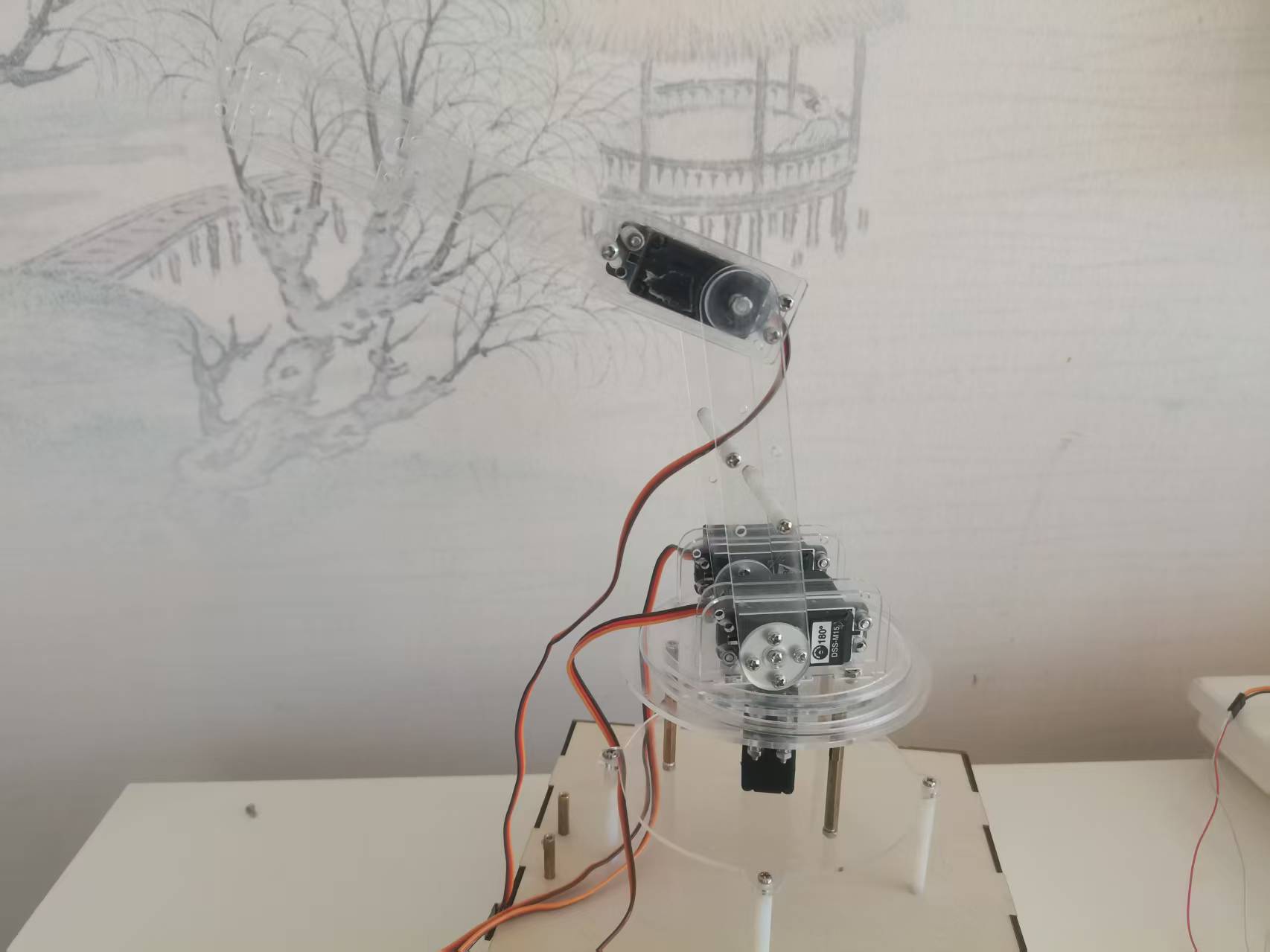
五、演示效果:手势一动,机械臂“心领神会”
六、项目总结与展望:开源精神的“接力”
这个低成本手势智控机械臂项目,实现了千元级机械臂的核心控制功能。通过这个项目,社团成员不仅掌握了机械结构设计、激光切割加工、Arduino编程等技能,更深刻体会到了开源技术的魅力——开源图纸为我们节省了从零设计的时间,开源软件降低了编程门槛,而分享经验则是对开源精神的最好传承。
未来,我们计划在现有基础上进行两项优化:一是增加手势的种类,实现机械臂的多自由度控制;二是加入物体识别功能,让机械臂能自动识别指定物品并完成抓取。
附件


 他的勋章
他的勋章
评论