 返回首页
返回首页
 回到顶部
回到顶部

什么是 CanMV K230?
CanMV K230是一款高性价比的RISC-V边缘AI平台,凭借低功耗、强视觉处理能力和开放的开发生态,成为嵌入式AI开发的理想选择,尤其适合需要快速部署视觉与AI功能的创客、中小企业及教育场景。CanMV 是一套 AI 视觉开发平台,K230 是其核心芯片。该模块结合了图像采集、AI推理、边缘计算等能力,适合嵌入式视觉应用开发。
CanMV:类似 OpenMV 的图像处理框架,支持 Python 编程,简化视觉识别开发流程。
K230 芯片:嘉楠科技推出的 AIoT SoC,采用 RISC-V 架构,内置第三代 KPU(AI加速单元),算力高达 6 TOPS,性能是 K210 的 13.7 倍。


知识点
摄像头图像翻转是调整摄像头对采集的图像进行方向调整(如上下颠倒、左右镜像)的处理,常用于修正因摄像头安装角度(如倒置、侧装)或硬件特性导致的画面方向异常,确保显示的图像符合人眼视觉习惯。
1、常见的翻转类型(按方向划分)
水平翻转(左右镜像)图像沿垂直中轴线对称反转,类似照镜子的效果(左变右、右变左)。▶ 适用场景:摄像头镜头朝向错误(如自拍时画面左右颠倒)、视频通话时对方看到的画面与自己动作镜像(需矫正为正向)。
垂直翻转(上下颠倒)图像沿水平中轴线反转,画面上下颠倒(顶部变底部、底部变顶部)。▶ 适用场景:摄像头倒装(如监控摄像头为隐藏安装而倒置固定在天花板)、硬件驱动默认输出方向错误(如部分 USB 摄像头初始画面颠倒)。
旋转(90°/180°/270°)严格来说属于 “旋转” 而非单纯 “翻转”,但常被归为同类调整。通过顺时针或逆时针旋转图像,解决摄像头侧装(如竖屏设备中横装的摄像头)导致的画面倾斜问题。▶ 适用场景:车载摄像头侧装、竖屏显示器搭配横置摄像头(如手机竖拍时画面需要旋转 90°)。
2、实现方式(硬件 / 软件层面)
图像翻转的处理可在采集端或显示端完成,具体方式取决于设备功能:
1. 硬件层面(摄像头 / 芯片自带功能)
部分摄像头内置翻转电路或通过 ISP(图像信号处理器)直接输出翻转后的图像,无需额外软件处理,延迟更低(如监控摄像头的 “倒装模式”,在硬件中预设垂直翻转)。
原理:在图像传感器输出原始数据后,通过芯片内部逻辑调整像素排列顺序(如垂直翻转时,将第 1 行像素与最后 1 行对调)。
2. 软件层面(系统 / 应用程序处理)
若硬件不支持,可通过软件算法对图像数据进行翻转,常见于手机、电脑等设备:
系统级设置:在摄像头驱动或设备设置中勾选 “水平翻转”“垂直翻转”(如 Windows 的 “相机” 应用设置、Android 的摄像头参数配置)。
应用级处理:视频软件(如 OBS 直播软件、Zoom 会议软件)通过图像算法实时翻转画面(如调用 OpenCV 的flip函数,参数控制翻转方向)。
原理:通过代码遍历图像像素矩阵,重新排列像素位置(例如水平翻转时,交换每行的左右像素;垂直翻转时,交换每列的上下像素)。
3、典型应用场景
监控摄像头:倒装在天花板时,通过垂直翻转让画面恢复正向(避免观看者仰头 “歪脖子”)。
手机 / 平板自拍:前置摄像头默认输出镜像画面(符合人眼习惯),但部分场景(如扫码)需关闭镜像(水平翻转)以确保二维码正常识别。
直播 / 视频会议:主播通过水平翻转修正画面左右颠倒,让观众看到与实际动作一致的方向。
工业检测:摄像头斜向安装时,通过旋转调整画面至正向,便于机器视觉算法分析(如检测产品缺陷时需画面方向统一)。


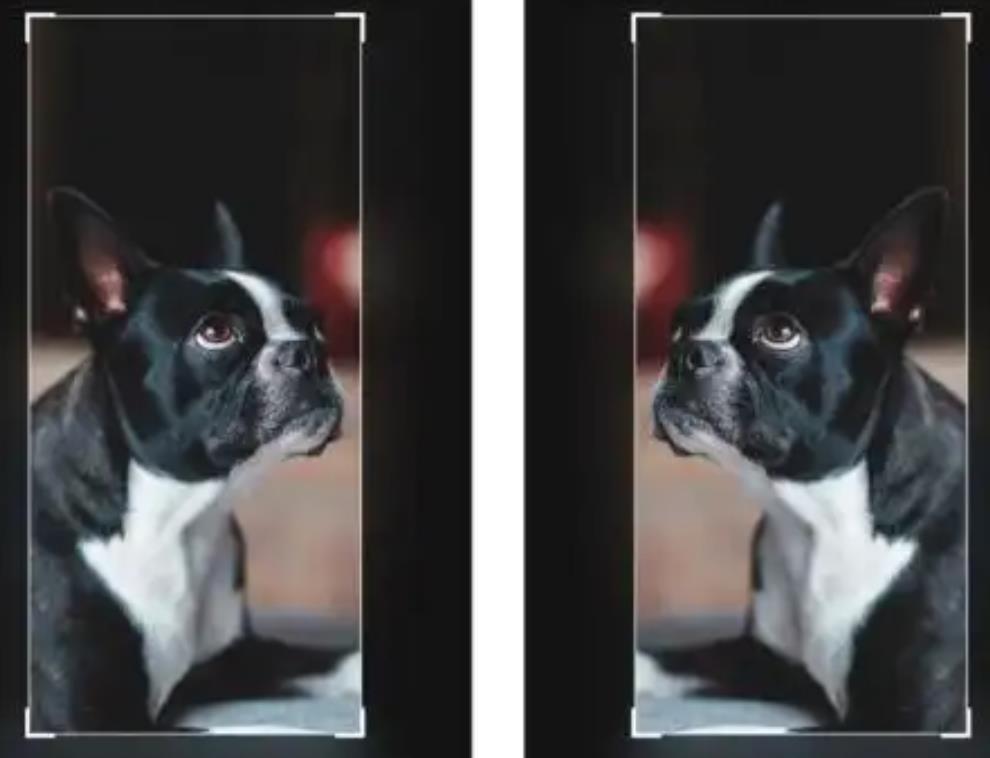
【花雕动手做】CanMV K230 AI视觉识别模块之摄像头图像水平翻转(镜像)
描述
配置图像传感器是否进行水平镜像。
语法
sensor.set_hmirror(enable)
参数
参数名称 描述 输入/输出
enable True 开启水平镜像功能 False 关闭水平镜像功能 输入
返回值
返回值 描述
无
举例
sensor.set_hmirror(True)
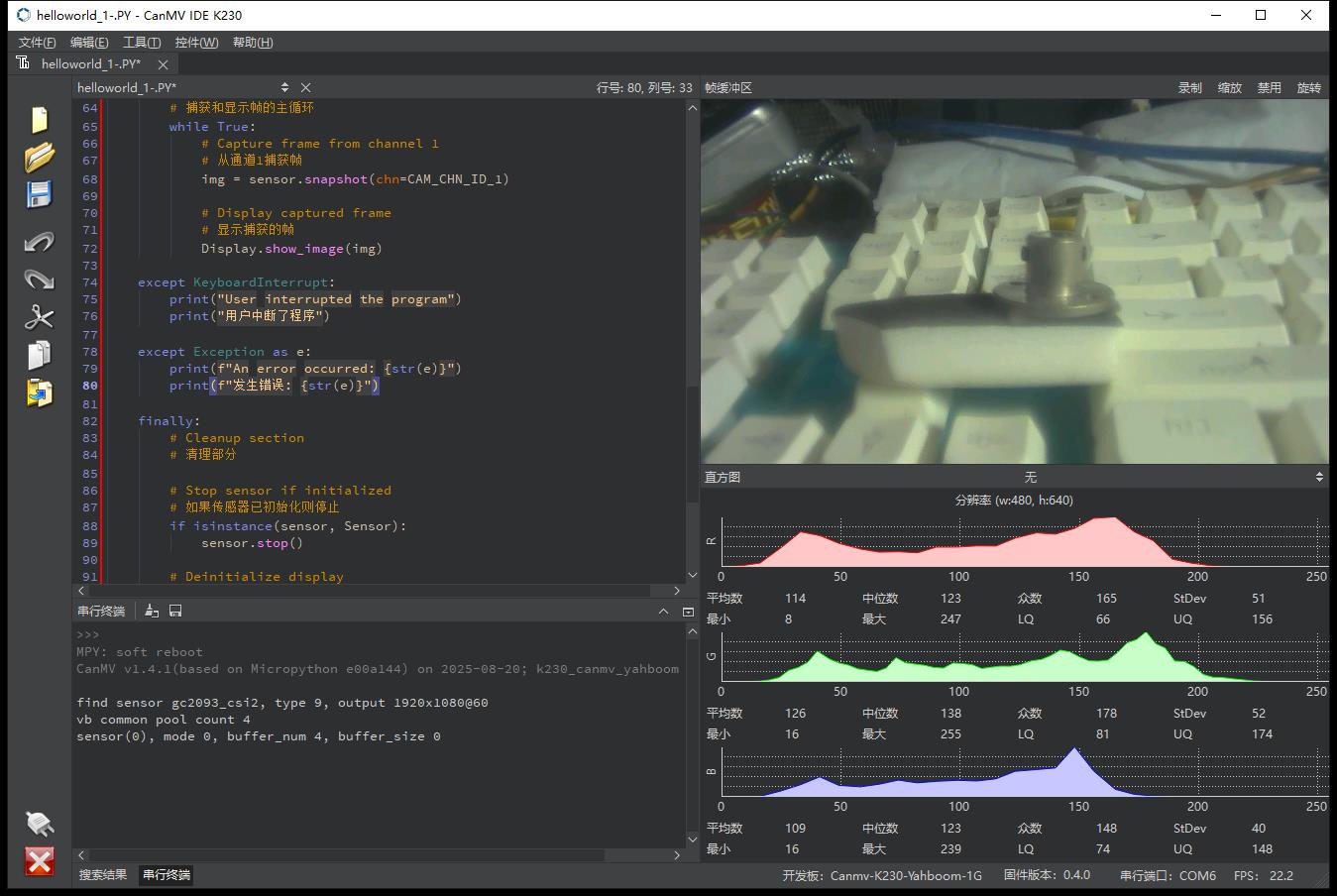
项目测试实验代码
#【花雕动手做】CanMV K230 AI视觉识别模块之摄像头图像水平翻转(镜像)
"""
Camera preview demo
摄像头预览演示
This script initializes camera sensor, displays preview and handles cleanup
本脚本初始化摄像头传感器、显示预览并处理清理工作
"""
import sys
import uos as os # 导入操作系统接口模块,重命名为os
import time
from media.sensor import * # 导入传感器模块
from media.display import * # 导入显示模块
from media.media import * # 导入媒体管理模块
def init_sensor():
"""
Initialize camera sensor with specified configuration
使用指定配置初始化摄像头传感器
功能:配置摄像头参数并返回传感器对象
关键配置:设置水平镜像为True,实现图像左右翻转
"""
sensor = Sensor() # 创建传感器实例
# Reset sensor to default state
# 将传感器重置为默认状态
# 作用:清除之前的配置,确保从干净状态开始
sensor.reset()
# Configure channel 1 output format to 640x480 RGB565
# 配置通道1输出格式为640x480 RGB565
# 参数说明:
# width=640, height=480 - 设置图像分辨率
# chn=CAM_CHN_ID_1 - 指定使用通道1
sensor.set_framesize(width=640, height=480, chn=CAM_CHN_ID_1)
# 设置像素格式为RGB565
# RGB565特点:每个像素16位(5位红+6位绿+5位蓝),节省内存
sensor.set_pixformat(Sensor.RGB565, chn=CAM_CHN_ID_1)
# 关键功能:启用水平镜像(水平翻转)
# 设置为True时,图像会左右翻转,就像照镜子一样
# 应用场景:前置摄像头、需要镜像显示的场合
sensor.set_hmirror(True)
return sensor # 返回配置好的传感器对象
def main():
"""
Main function to run camera preview
运行摄像头预览的主函数
功能:主程序流程,包含初始化、运行和清理
"""
sensor = None # 初始化传感器变量,便于异常处理
try:
# Initialize camera sensor
# 初始化摄像头传感器
sensor = init_sensor() # 调用初始化函数获取传感器对象
# Initialize virtual display with 640x480 resolution
# 初始化640x480分辨率的虚拟显示
# 参数说明:
# Display.ST7701 - 显示屏驱动型号
# width=640, height=480 - 显示分辨率,与摄像头分辨率匹配
# to_ide=True - 同时输出到IDE,便于调试和观察
Display.init(Display.ST7701, width=640, height=480, to_ide=True)
# Initialize media management
# 初始化媒体管理
# 作用:分配和管理媒体处理所需的系统资源
MediaManager.init()
# Start sensor operation
# 启动传感器运行
# 作用:开始摄像头数据采集流程
sensor.run()
# Main loop to capture and display frames
# 捕获和显示帧的主循环
# 功能:持续捕获图像并显示,形成实时预览
while True:
# Capture frame from channel 1
# 从通道1捕获帧
# 返回值img:包含图像数据的对象
img = sensor.snapshot(chn=CAM_CHN_ID_1)
# Display captured frame
# 显示捕获的帧
# 作用:将图像数据发送到显示设备
Display.show_image(img)
except KeyboardInterrupt:
# 处理键盘中断(Ctrl+C)
print("User interrupted the program")
print("用户中断了程序")
except Exception as e:
# 处理其他所有异常
print(f"An error occurred: {str(e)}")
print(f"发生错误: {str(e)}")
finally:
# Cleanup section
# 清理部分 - 无论是否发生异常都会执行
# Stop sensor if initialized
# 如果传感器已初始化则停止
# 作用:安全停止摄像头采集,释放硬件资源
if isinstance(sensor, Sensor):
sensor.stop()
# Deinitialize display
# 反初始化显示
# 作用:关闭显示驱动,释放显示资源
Display.deinit()
# Enable sleep mode
# 启用睡眠模式
# 作用:允许系统进入低功耗状态
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100) # 短暂延时确保资源完全释放
# Release media resources
# 释放媒体资源
# 作用:清理媒体管理器分配的所有资源
MediaManager.deinit()
if __name__ == "__main__":
# 程序入口点
main() # 调用主函数启动程序代码核心功能解析
1. 水平镜像实现
python
sensor.set_hmirror(True)
功能:启用摄像头水平镜像
效果:图像左右翻转,如同照镜子
应用场景:
前置摄像头应用
需要镜像显示的场合
文字识别前的预处理
2. 图像处理流水线
text
摄像头采集 → 水平镜像处理 → RGB565格式转换 → 显示输出
3. 资源管理特点
异常安全:使用try-except-finally确保资源正确释放
渐进式初始化:按顺序初始化各组件
完整清理:确保所有硬件资源都被正确释放
4. 关键参数说明
分辨率:640×480 - 平衡性能与清晰度
像素格式:RGB565 - 节省内存的16位彩色格式
显示模式:ST7701驱动 + IDE输出 - 便于调试
技术要点
镜像设置的时机
在sensor.reset()之后立即设置set_hmirror(True),确保在数据流开始前就配置好镜像参数。
资源释放顺序
严格按照以下顺序清理:
停止传感器
关闭显示
释放媒体资源
这个程序展示了如何在CanMV K230模块上实现基本的摄像头镜像功能,代码结构清晰,异常处理完善,适合作为计算机视觉项目的基础模板。
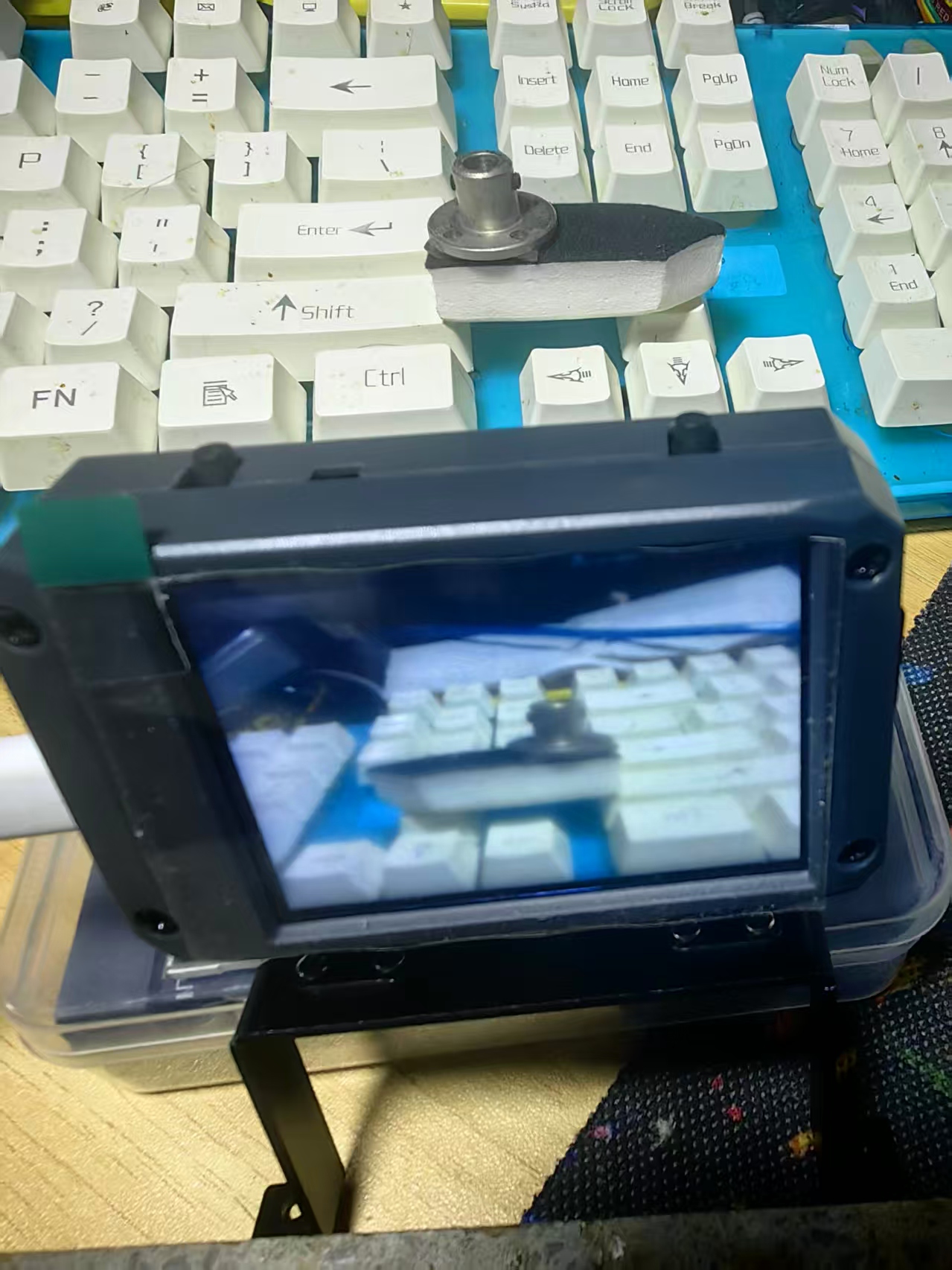
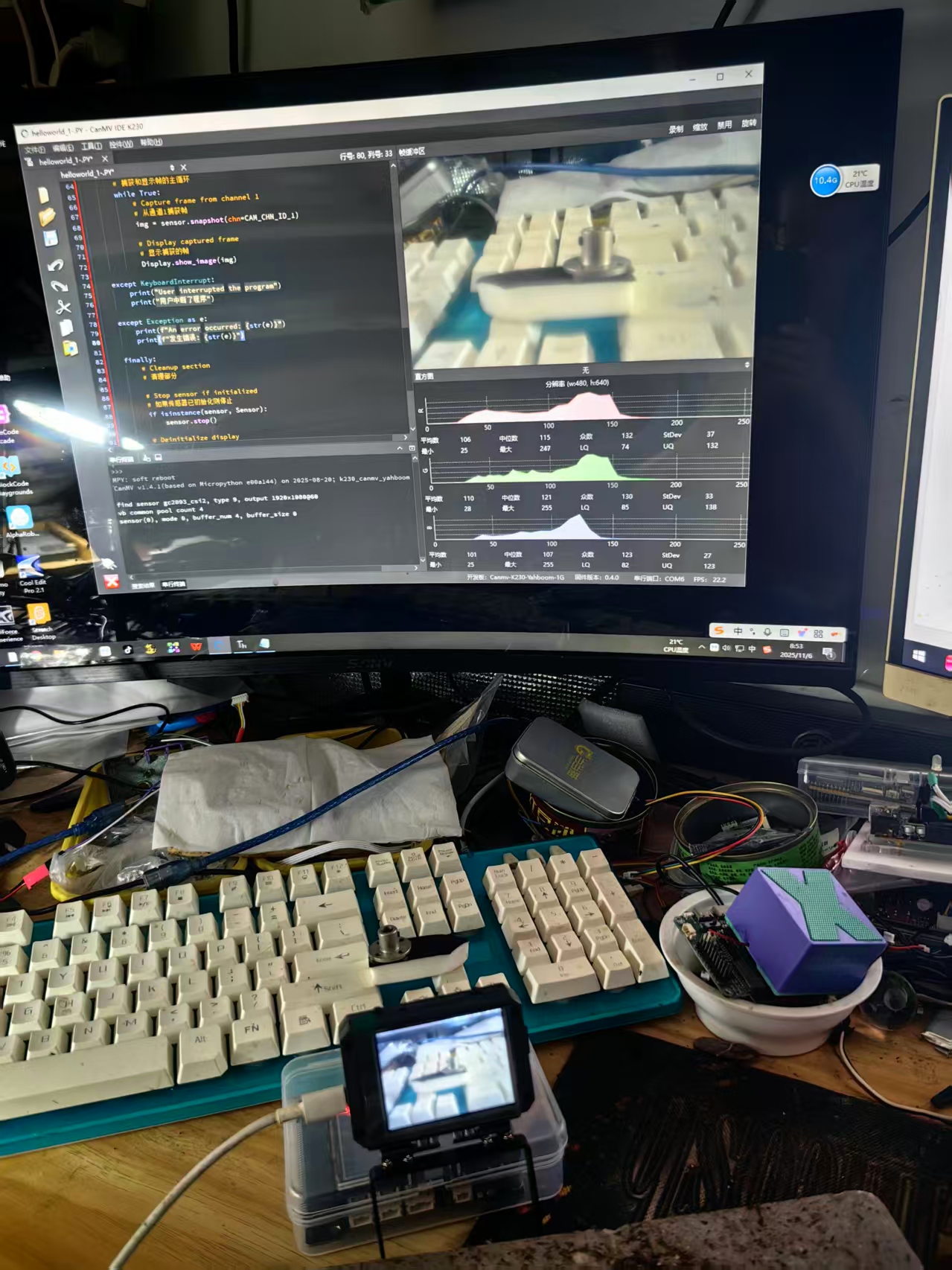
实验场景图


 他的勋章
他的勋章

罗罗罗2025.11.11
666
驴友花雕2025.11.11
谢谢罗罗罗的许多鼓励!
驴友花雕2025.11.17
感谢罗罗罗老师的许多支持和鼓励!