 返回首页
返回首页
 回到顶部
回到顶部

1.项目介绍
1.1项目背景
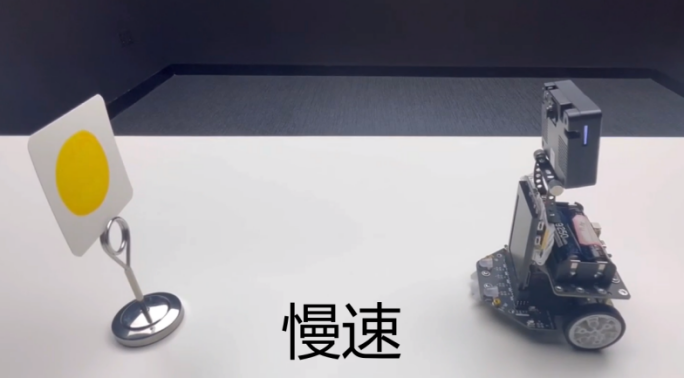
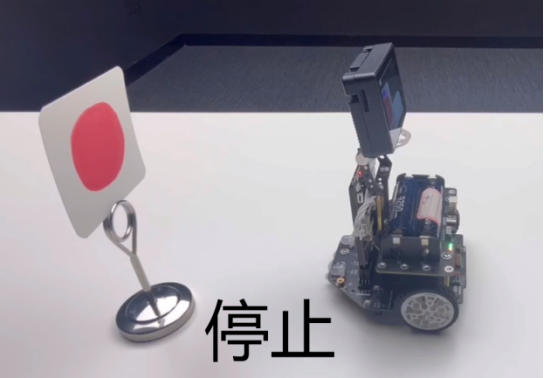
在校园科技节的迷你交通赛道上,一辆搭载着“眼睛”的智能小车正灵活穿梭——当前方自制“红绿灯”亮起红色,它立刻稳稳停下;切换成绿色,便轻快地向前驶去;若黄灯闪烁,又会缓缓减速,像极了遵守规则的“小司机”。这并非复杂的大型设备,而是由行空板K10与二哈识图 2共同打造的“智能红绿灯识别”小车,用轻量级AI技术实现了从“看信号”到“控制启停”的完整闭环。
从“看红绿灯”到“控制小车”,这个项目用最简单的组件组合,诠释了AI与硬件结合的魅力——它不仅是一个能“遵守交通规则”的小装置,更是一扇打开“AI+交通”世界的窗,让创意能通过可触摸的互动落地,让技术变得“看得见、摸得着”。
1.2演示视频
2. 项目实现原理
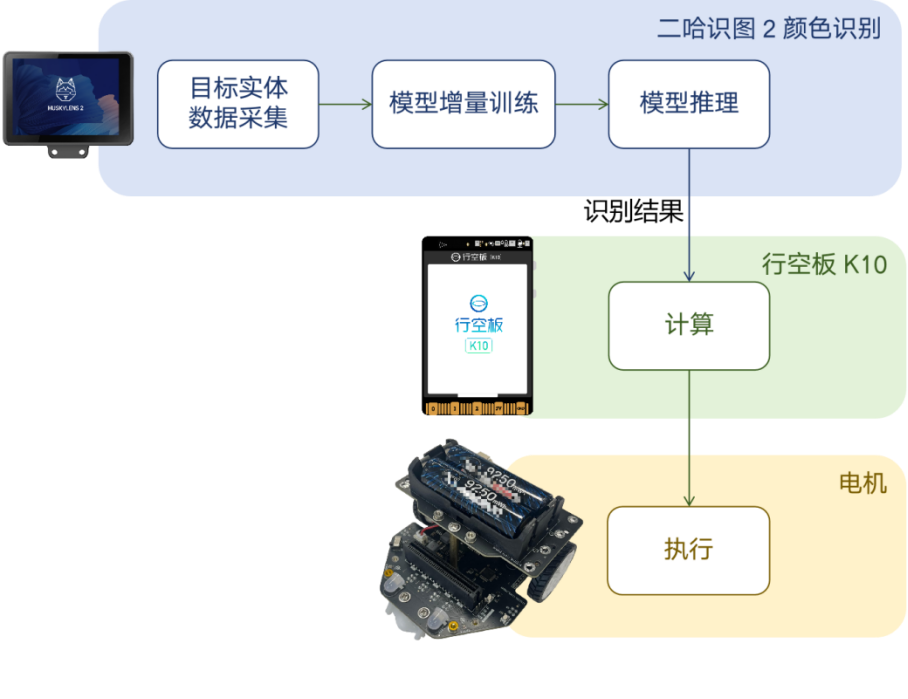
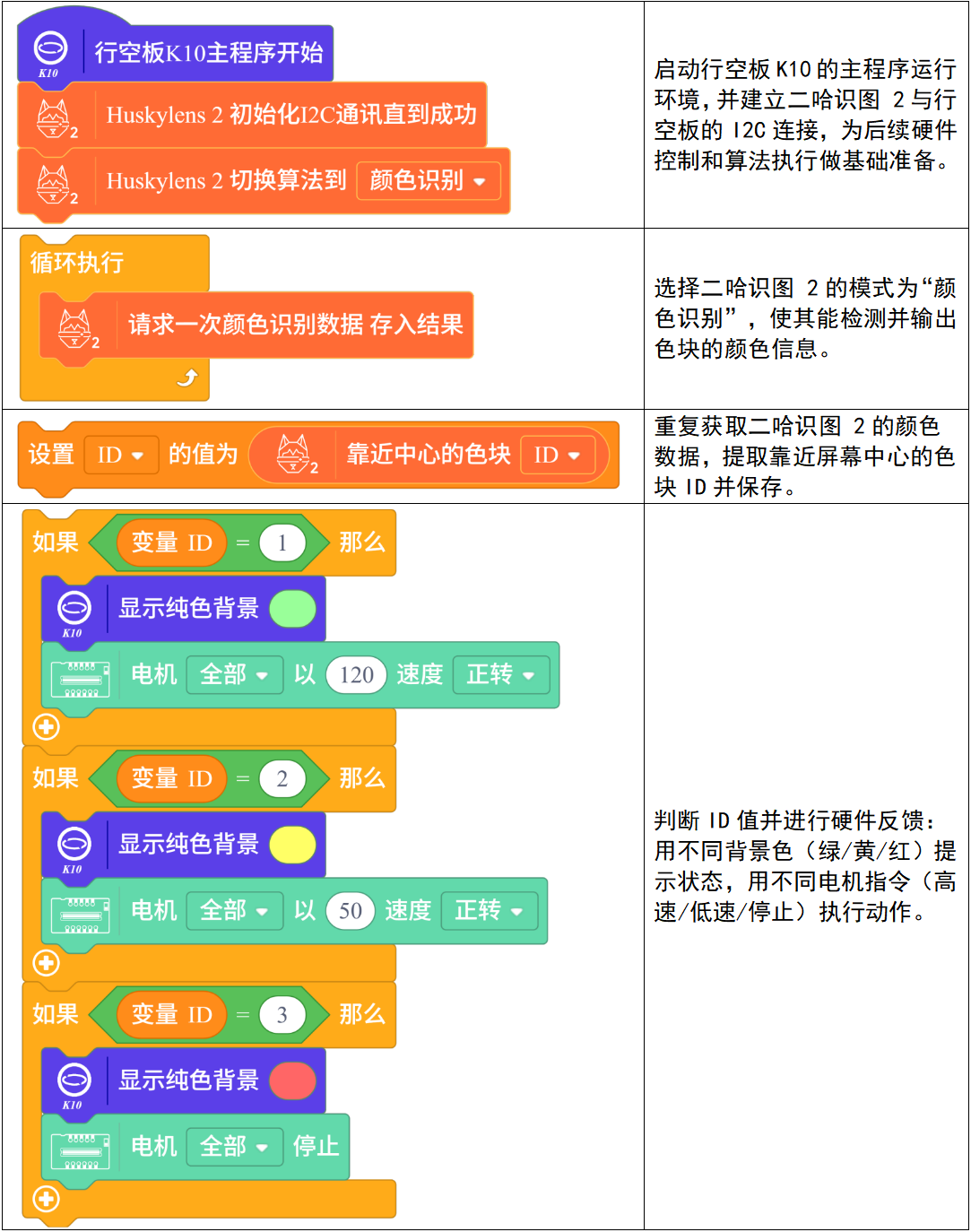
它的核心逻辑如下:该项目以行空板K10为控制核心,首先通过I2C通讯完成二哈识图2的初始化,并将其切换至内置的颜色识别功能。随后系统进入循环流程,持续向二哈识图2请求颜色识别数据,二哈识图2会实时检测画面中的色块,并将靠近画面中心的色块ID反馈给行空板K10。行空板K10根据获取到的ID值执行对应操作——当ID为1时控制电机全部以较高的速度前进ID为2时电机以中速前进;ID为3时则停止。整个过程依托二哈识图 2内置的颜色识别能力实现色块的快速检测与ID输出,再由行空板完成逻辑判断与外设控制,形成了“颜色检测 - ID 反馈 - 动作执行”的实时闭环,实现了基于红绿灯颜色识别的简单小车自动启停功能。
3.软硬件准备
3.1软硬件器材清单

注意:Mind+编程软件版本为v2.0,HuskyLens的版本为二哈识图 2。
3.2硬件连接
请按照下方连接图,将电脑、行空板K10和二哈识图 2进行连接。

3.3软件平台准备
官网下载安装Mind+ 2.0及以上版本安装包,安装完成后,双击打开。

4.项目制作
4.1二哈识图 2操作
首先,由于出厂语言默认为英文,我们可以用触屏的方式左右滑动,找到“System Settings”(系统设置)图标,将系统语言设置成自己想要的语言(支持英文,中文简体和中文繁体)。

点击进入“System Settings”,下滑至底部找到“Language”选项。点击“Language”,进入设置语言界面。

点击自己想要的语言选项。之后,系统会切换语言并自动返回至菜单页面,如下图是切换为中文简体的示意图。

其次,选择二哈识图 2的通信方式。
二哈识图 2支持UART(串口)和I2C两种通信方式,本教程中使用I2C通信模式。
点击“系统设置”->协议种类->选择I2C通讯模式后返回主菜单界面。

左右滑动,找到“颜色识别”功能。

请按照下面的步骤对所有的颜色进行学习:
对准要学习的指定颜色,调整二哈识图 2“看”的角度,使屏幕中间的“十”字接触到要学习的颜色,然后按下二哈识图 2右上角的A键,学习该颜色。

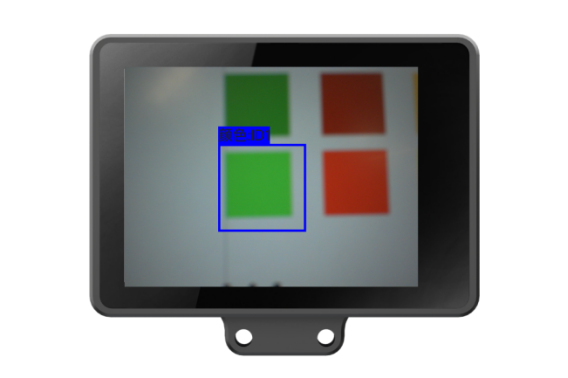
学习完成后,如识别到已学习的颜色,屏幕将以彩色方框框出该色块,并在色块上方显示颜色名字、ID号。例如“颜色:ID1”。其中颜色名默认为“颜色”。学习更多颜色,可依此类推。
二哈识图 2的更多详细使用方法见下面的网址:
https://wiki.dfrobot.com.cn/_SKU_SEN0638_Gravity_HUSKYLENS_2_AI_Camera_Vision_Sensor
按照上面的步骤学习所有的颜色后,即可开始编写代码,实现一个基于颜色识别的红绿灯识别小车。
4.2代码实现
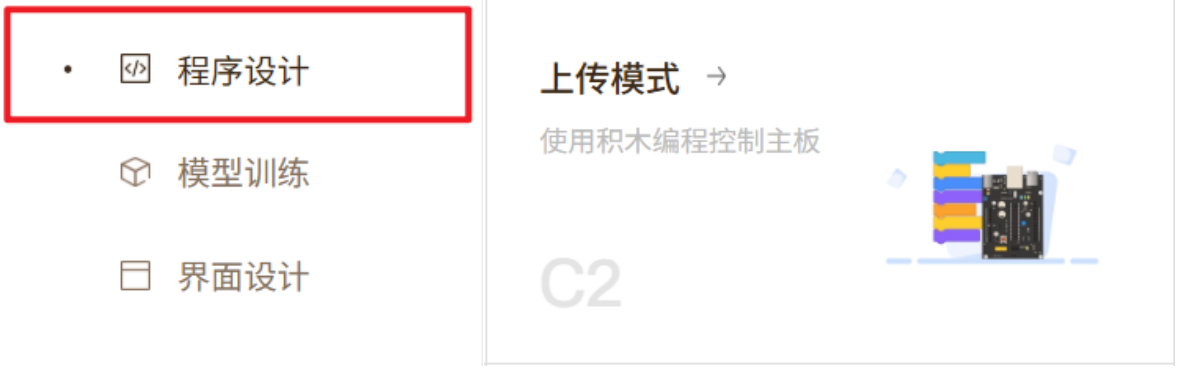
打开编程软件Mind+,选择“程序设计”中的“上传模式”。
首先,我们需要在Mind+中添加相应的扩展,包括行空板K10、二哈识图 2 AI摄像头和掌控扩展版。
进入“扩展”页面并搜索“行空板K10”。

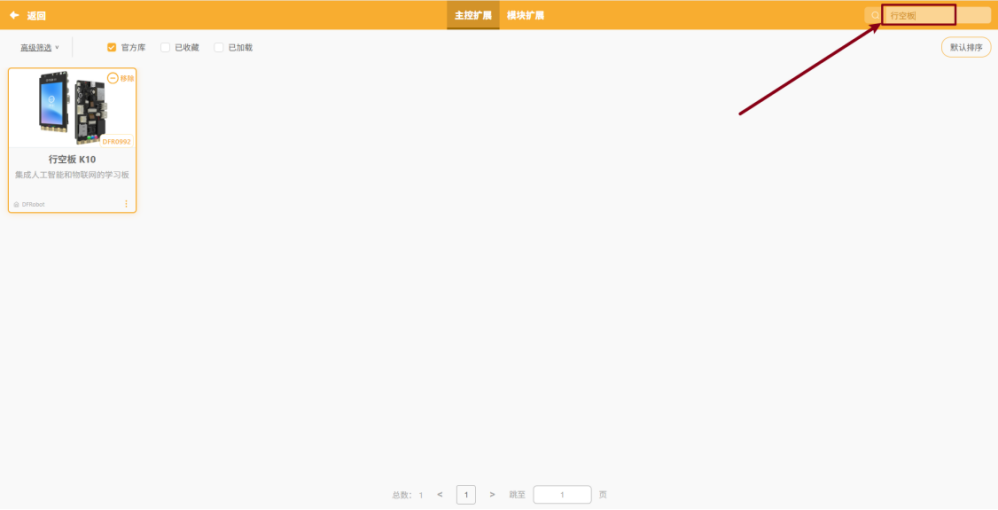
点击扩展包上的“下载”按钮,等待下载完成。

点击该扩展包完成加载。

按照加载“行空板K10”的步骤加载用户库“掌控扩展板”和“HuskyLens 2 AI摄像头”。

加载完毕后,点击“返回”按钮回到编程界面。
在连接设备中点击“连接”。
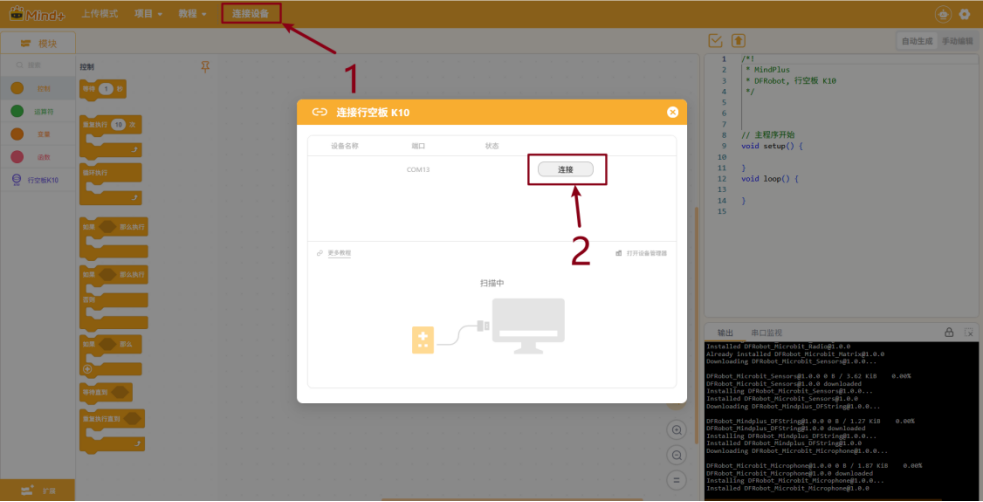
连接成功界面如下,点击“×”返回。


设备连接成功后,编写程序如下:

核心代码解析如下:
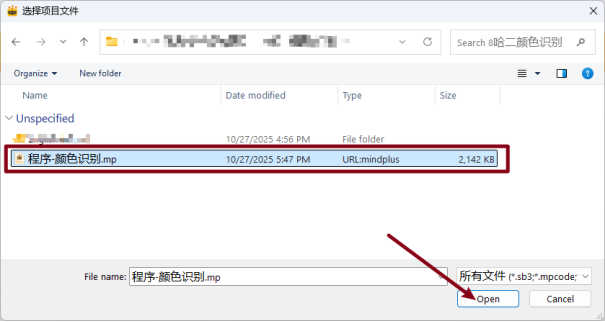
附件中有该项目的完整程序文件,通过打开项目->打开本地文件选择要打开的项目。
选择附件中的项目,并点击“打开”。
点击“上传到设备”运行程序。

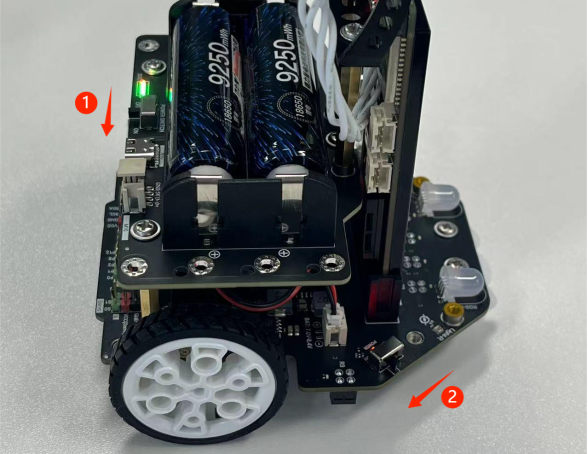
断开二哈识图 2和行空板K10与电脑的连接,将行空板K10 和二哈识图 2正确安装到车架上。安装后打开开关完成供电。

实现效果如下:

5.附件清单

通过网盘分享的文件链接: https://pan.baidu.com/s/1u4448KoYw79afFOWiuvIew?pwd=yi68



 他的勋章
他的勋章

lsnkjk2026.05.20
云盘啥也没有
zoey不种土豆2026.06.02
谢谢提醒,已更新,现在可以看了
罗罗罗2025.11.12
666