 返回首页
返回首页
 回到顶部
回到顶部

一、项目背景
随着道路交通流量的持续增长,驾驶员分心驾驶已成为引发交通事故的重要诱因。驾驶员在行车过程中看手机、与乘客聊天、捡拾物品等行为,会导致视线偏离前方路面,反应速度下降,大幅增加事故风险。
基于此,本项目依托 DFRobot 二哈 2(Huskylens V2)视觉传感器的注视检测功能,设计并实现一套司机分心驾驶提醒系统。该系统可实时检测驾驶员注视方向、投影角度 / 长度、俯仰角、偏航角等参数,通过判断视线偏离前方路面的时长,在超出安全阈值时触发语音提醒,及时纠正驾驶员分心行为,提升行车安全性。
二、核心硬件与技术原理
1. 核心硬件
- 主控单元:Arduino Uno 控制器,作为系统核心处理单元,负责数据接收、逻辑判断与指令下发;
- 视觉传感器:DFRobot 二哈 2(Huskylens V2),支持注视识别(GAZE RECOGNITION)、人脸朝向检测(FACE ORIENTATION)等算法,可输出注视方向投影长度、俯仰角(pitch)、偏航角(yaw)等关键参数;
- 执行单元:二哈 2 传感器内置音频播放模块,支持自定义语音文件播放;
2. 技术原理
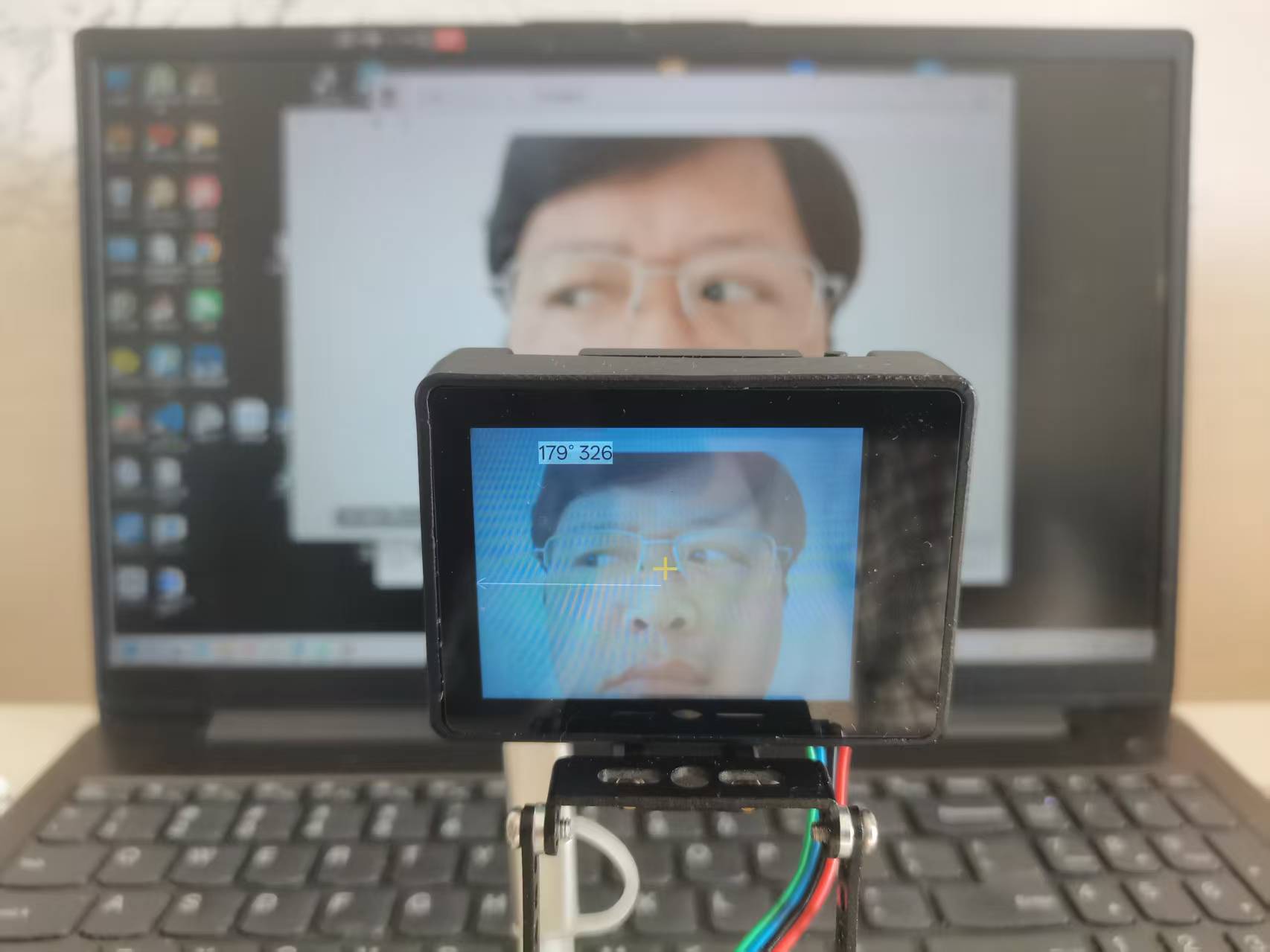
二哈 2 视觉传感器通过内置 AI 算法识别驾驶员面部特征,实时追踪眼球注视方向,计算出注视方向相对前方路面的投影长度、俯仰角 / 偏航角等参数。系统以 “注视投影长度” 为核心判断依据:当投影长度超过设定阈值(代表视线偏离前方),且持续时长超过 3.5 秒(允许驾驶员短时观察两侧 / 后方路况),则判定为分心驾驶,触发语音提醒;若传感器未检测到有效注视数据(如驾驶员低头捡拾物品)且持续 4.5 秒,同样触发提醒,确保覆盖各类分心场景。
三、系统开发过程
1. 前期功能调试
在核心提醒功能开发前,先完成二哈 2 传感器关键功能的调试,验证数据采集与外设控制的可行性:
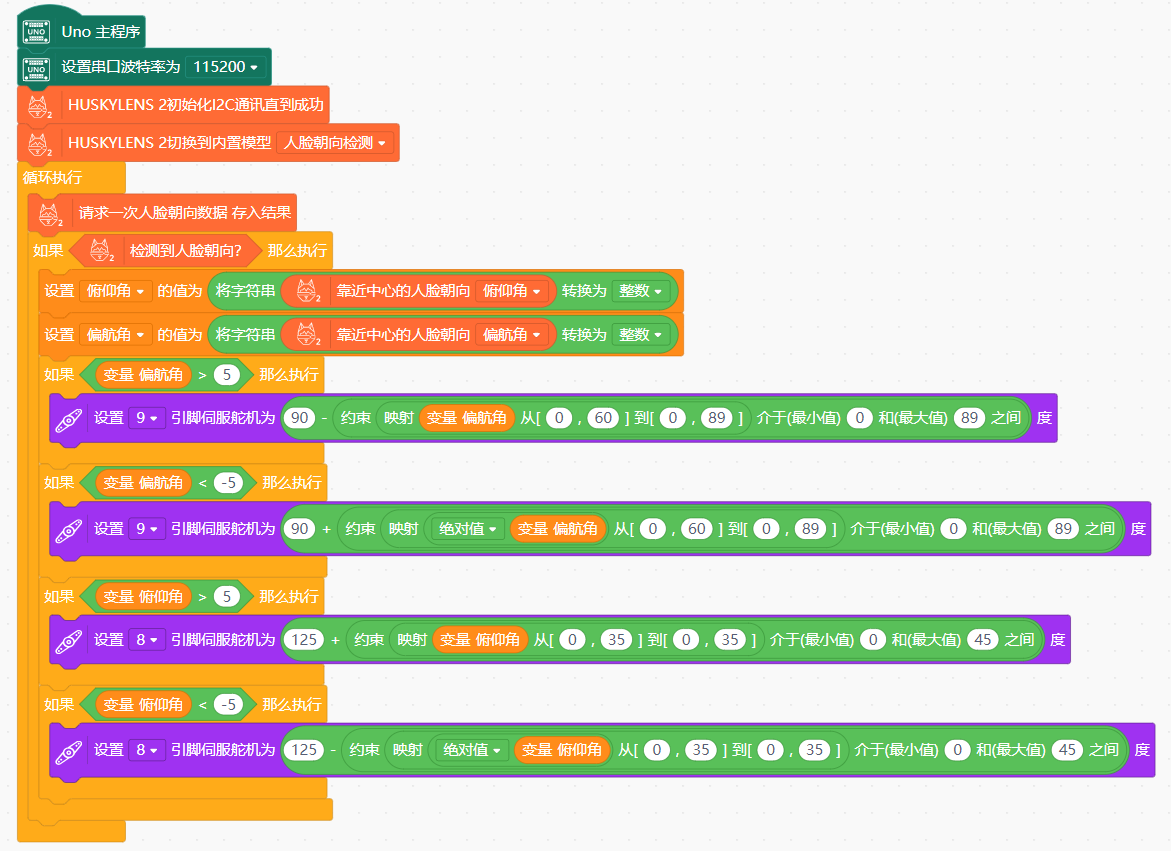
(1)注视检测控制舵机平台
通过二哈 2 的注视识别算法,采集注视方向的方位角、俯仰角、偏航角,驱动双舵机(分别接 Arduino 8、9 引脚)实现传感器平台的水平 / 垂直转动,确保传感器始终对准驾驶员面部,提升检测精度。核心逻辑为:
- 方位角 0~45°/315~360° 时,水平舵机向正前方微调;
- 方位角 135°~225° 时,水平舵机反向微调;
- 俯仰角超出 ±5° 阈值时,垂直舵机对应调整,使传感器保持最佳检测角度。

(2)人脸朝向检测优化舵机控制
基于人脸朝向识别算法,采集人脸俯仰角、偏航角,控制舵机。
2. 分心提醒核心功能开发
(1)系统初始化
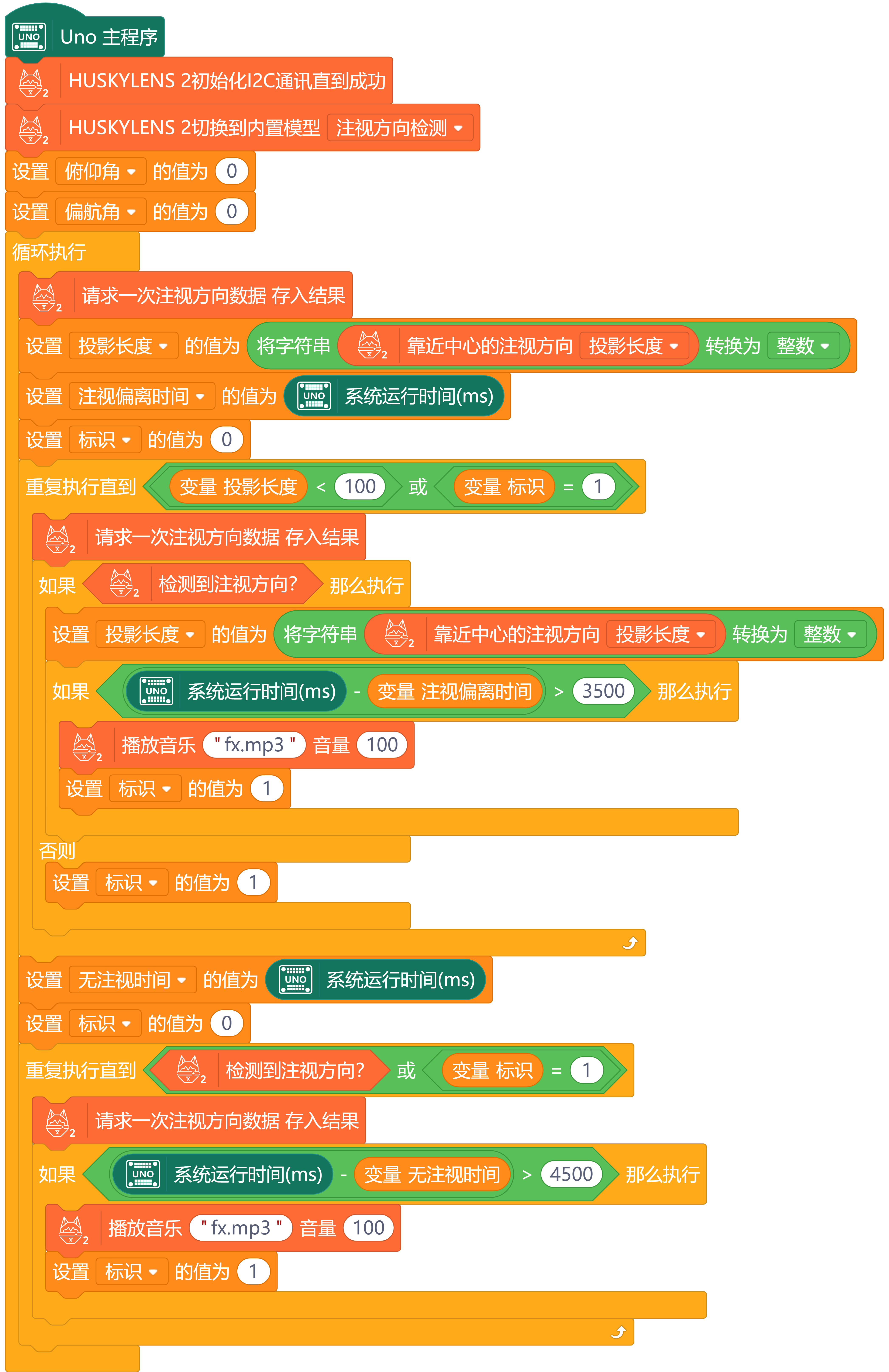
初始化 I2C 通信(二哈 2 与 Arduino 的通信方式),配置二哈 2 切换至注视识别算法,等待传感器稳定(5 秒),初始化关键变量(俯仰角、偏航角、投影长度、分心计时等)。
(2)实时数据采集
循环读取二哈 2 的注视识别数据,提取注视方向投影长度:若传感器检测到有效数据,将投影长度转换为数值型变量,作为分心判断的核心依据;若未检测到有效数据,触发无注视计时。
(3)分心判断逻辑
- 视线偏离判断:当投影长度≥100(代表视线偏离前方路面)时,启动分心计时;若计时超过 3.5 秒,触发二哈 2 播放语音提醒(“不要分心驾驶,请关注前方路面”),并重置计时标志;
- 无注视判断:若传感器持续未检测到有效注视数据超过 4.5 秒(如驾驶员低头捡东西),同样触发语音提醒,覆盖视线完全偏离的场景;
- 正常场景放行:若投影长度 < 100(视线聚焦前方)或分心时长未达阈值,重置计时,不触发提醒,允许驾驶员短时观察两侧 / 后方路况。
(4)语音提醒执行
二哈 2 传感器支持播放本地音频文件(如 fx.mp3),系统在判定分心后,调用playMusic函数播放提醒语音,音量设为 100%,确保驾驶员清晰感知。
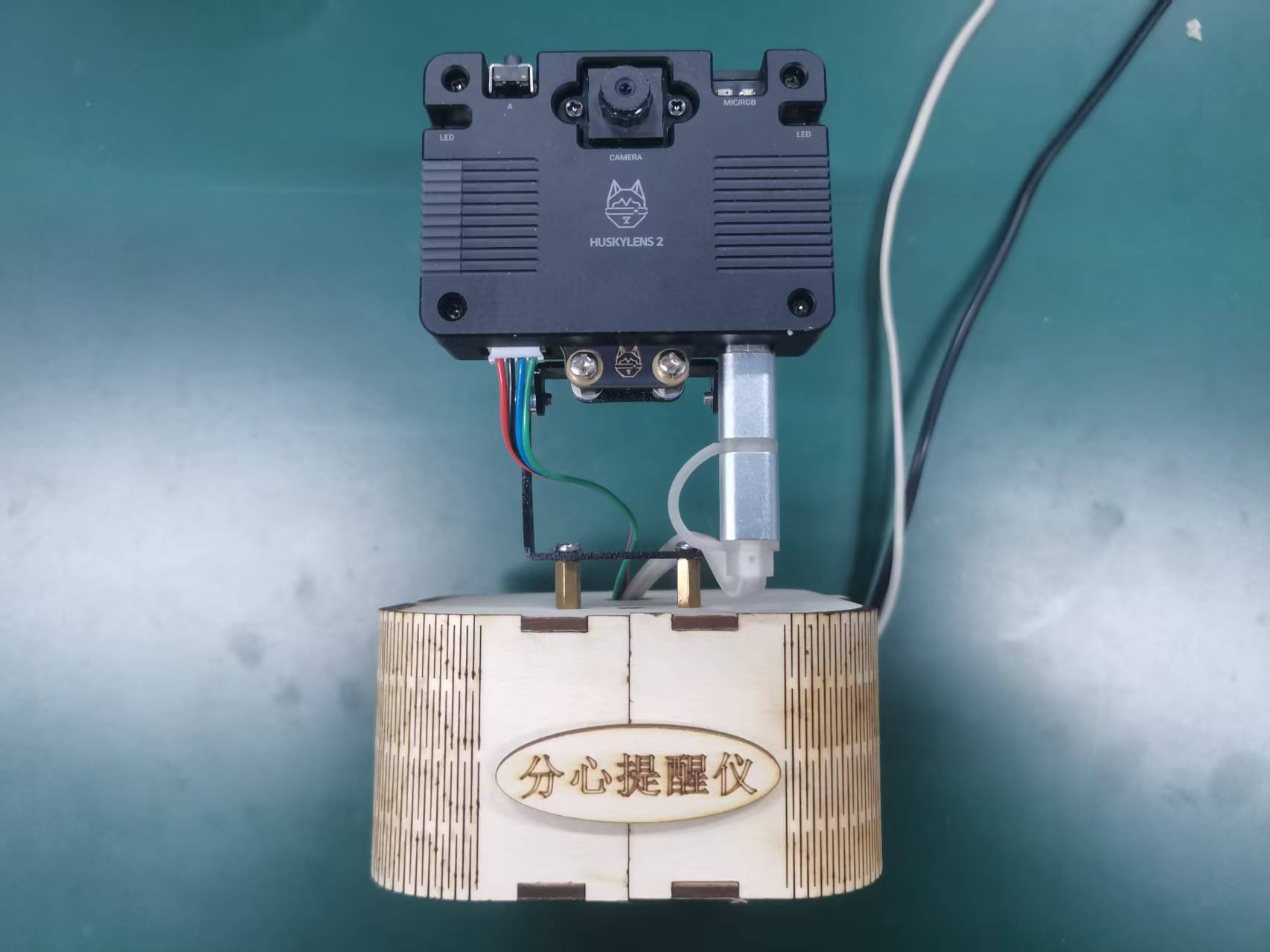
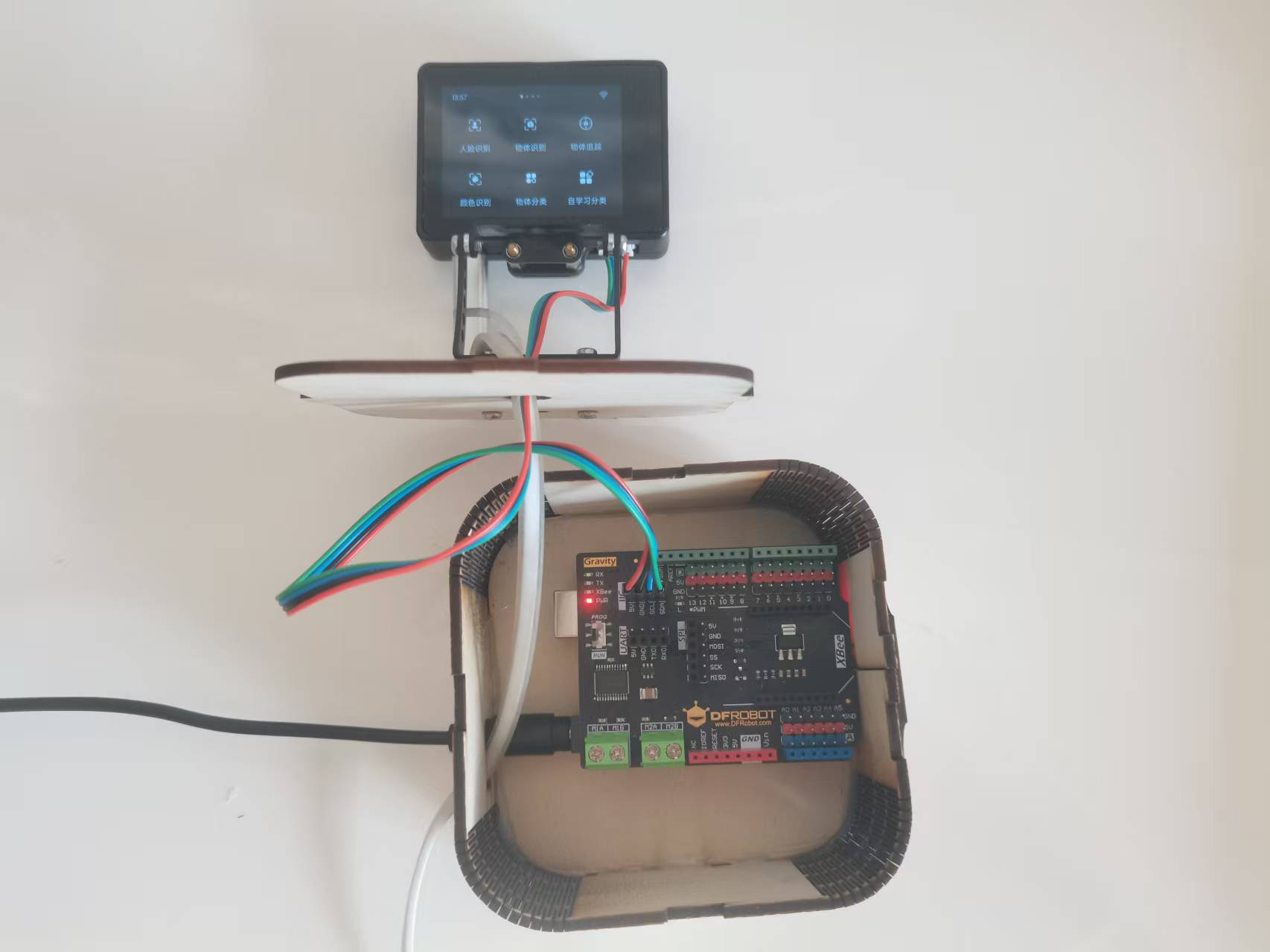
3.硬件搭建
五、系统测试与优化
1. 功能测试
- 正常场景:驾驶员注视前方路面时,投影长度 < 100,系统无提醒,计时正常重置;
- 短时偏离:驾驶员观察两侧 / 后方路况,偏离时长≤3.5 秒,系统不触发提醒;
- 分心场景:驾驶员看手机(投影长度≥100)且持续 3.5 秒以上,系统立即播放语音提醒;
- 无注视场景:驾驶员低头捡拾物品(传感器无有效数据),持续 4.5 秒后触发提醒。
2. 优化方向
- 调整投影长度阈值:根据不同车型、驾驶位安装角度,校准投影长度判定阈值,提升判断准确性;
- 拓展提醒方式:增加蜂鸣器、灯光提醒,适配静音 / 嘈杂行车环境;
- 数据存储功能:增加 SD 卡模块,记录分心次数、时长等数据,便于后续分析驾驶习惯。
六、项目总结
本项目基于二哈 2 视觉传感器的 AI 注视识别能力,实现了一套低成本、高实用性的司机分心驾驶提醒系统。系统通过实时采集注视方向参数,结合时长阈值判断,可精准识别驾驶员分心行为并及时提醒,有效弥补了传统驾驶辅助系统的不足。
相较于同类方案,本系统具备以下优势:一是依托二哈 2 的集成化 AI 算法,无需复杂的模型训练,开发门槛低;二是支持短时视线偏离放行,兼顾行车过程中观察路况的实际需求;三是硬件集成度高,二哈 2 内置音频模块,无需额外拓展发声设备,安装便捷。


 他的勋章
他的勋章
在北京吃烧烤的虫子2025.12.24
这是Mind+V1.x版本还是Mind+V2.x版本?