 返回首页
返回首页
 回到顶部
回到顶部

一、项目背景:
校园巡检是保障校园安全的重要方式,因此需要安保人员进行巡逻以保障校园安全,M10新的扩展板为远程校园巡检小车的方案验证提供了一种可行的方案,在本项目中结合扩展的马达驱动功能搭建了巡逻小车,为了方便安保人员的巡视,在项目中引入了视频图传功能,将巡逻到的画面通过物联网平台实时回传至数据看板中,方便安保人员的巡查。同时借助狮偶的物联网平台可实现远程遥控功能。
二、寻求分析:
根据实际需求,本项目需要满足以下要求:
1. 能够远程查看巡检画面;
2. 能实时将巡检画面显示到数据面板上;
3. 通过数据面板可以给小车发送控制指令;
4. 增加手机端控制功能,通过手机扫码实现小车控制;
5. 在手机端可以实现对对小车运行速度的调节;
6. 增加KIMI大模型功能,可通过远程实现拍照分析功能;
7. 增加远程语音提示功能。
三、设计思路:
选择使用TT马达作为驱动,通过扩展板的马达驱动端口实现对小车运行的控制,通过增加数据面板功能,完成视频显示和局域网中的控制功能,通过点击4个不同的按钮实现小车前进、后退、左转和右转的控制功能。为了方便控制,结合狮偶编程平台(https://openblock.online/testing/index.html)中提供的云变量功能,可实现和行空板的通讯功能,通过扫码和电脑端均可实现小车的运行控制,可跨网络实现小车的远程控制功能。

手机小程序端
数据看板
四、材料清单:
行空板M10
行空板 M10电机IO扩展板+电池扩展板
小车底盘;
摄像头;
扩音器;
USB扩展坞;
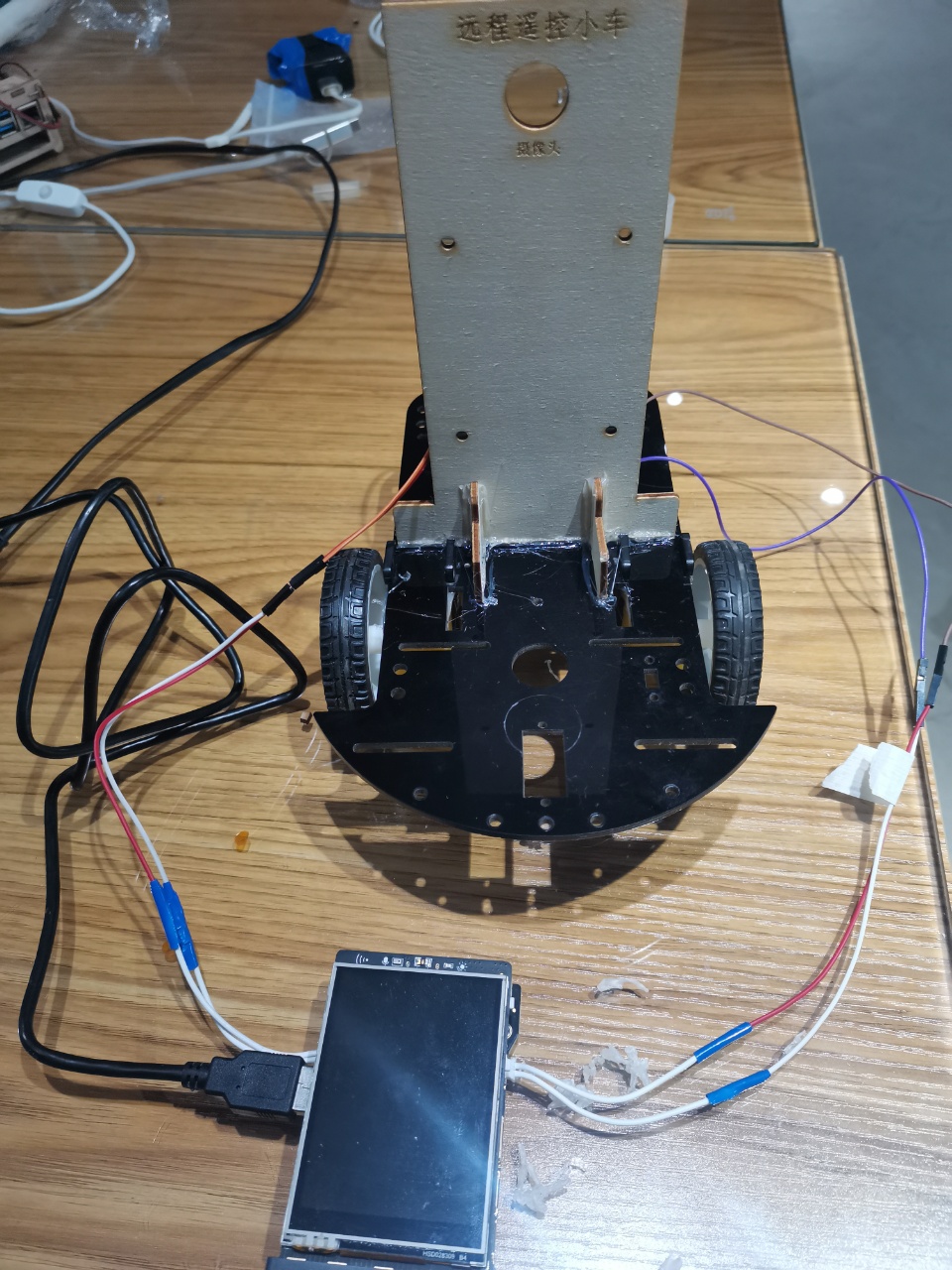
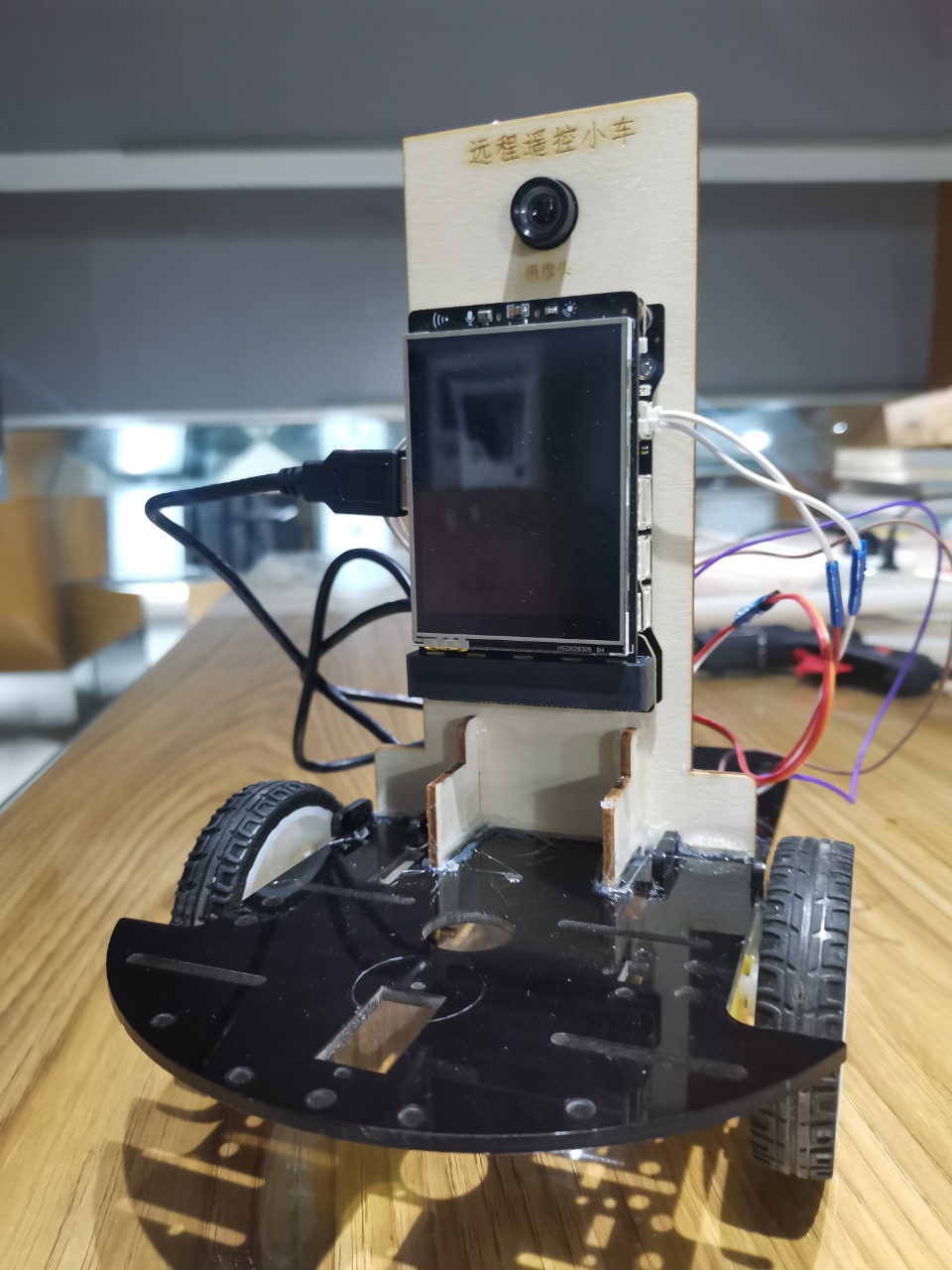
五、结构搭建部分:
在小车底盘上,通过激光切割设计了行空板安装支架,可将行空板安装到支架上,如下图所示:
六、物联网部分:
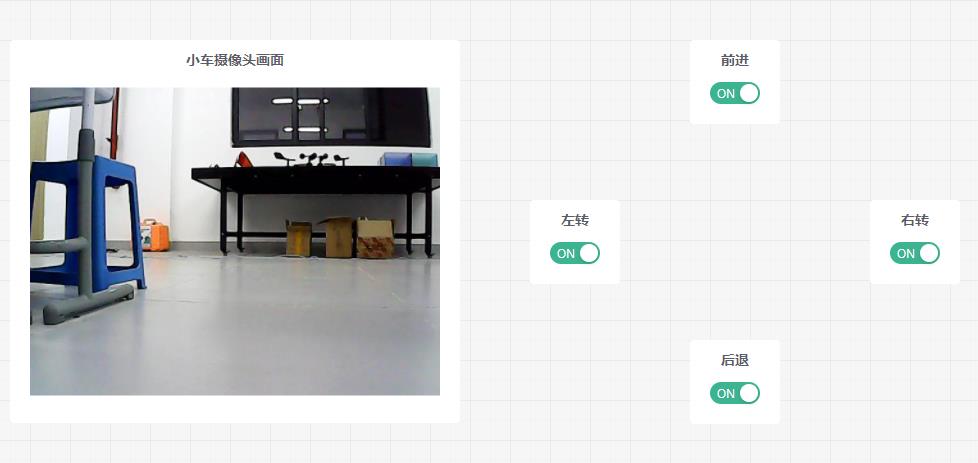
在本项目中首先通过SIOT物联网平台,搭建了可实现局域网控制巡检小车任务,经过测试这部分功能能够正常传输数据,实现对小车的控制和视频画面的检测。如下图所示:
数据面板
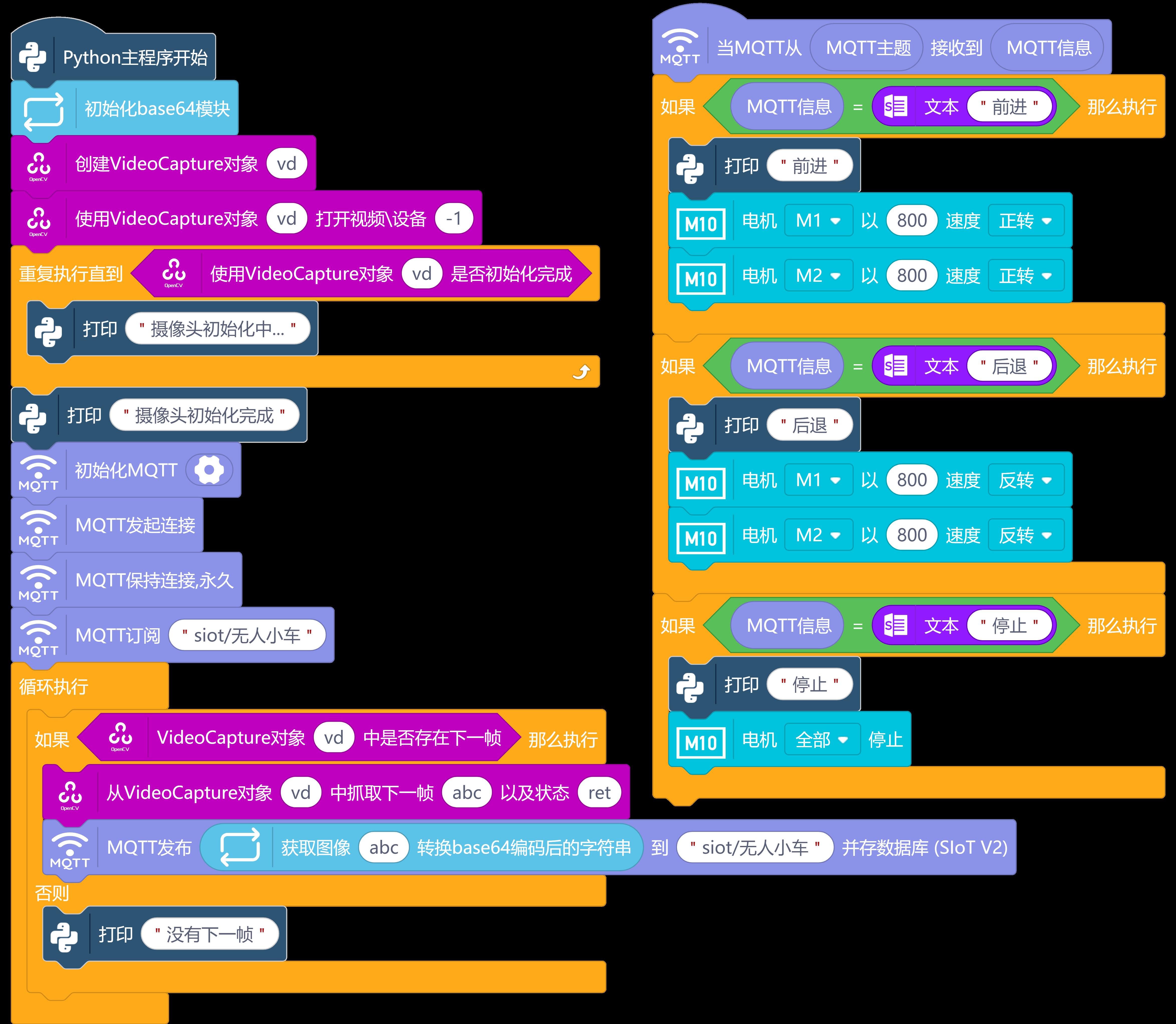
数据面板控制部分程序
为了方便对小车的控制,在原有的基础上增加了扫码控制的功能,通过狮偶平台提供的云变量功能可实现与行空板之间的数据交互功能,并将项目生成的二维码显示到行空板的屏幕上,可通过扫码的方式实现对小车的遥控功能,并且该功能不受局域网的限制,真正实现远程控制功能。

云变量扩展库

行空板通过云变量获取云端数据

在狮偶平台中通过添加不同的状态机实现不同的控制任务
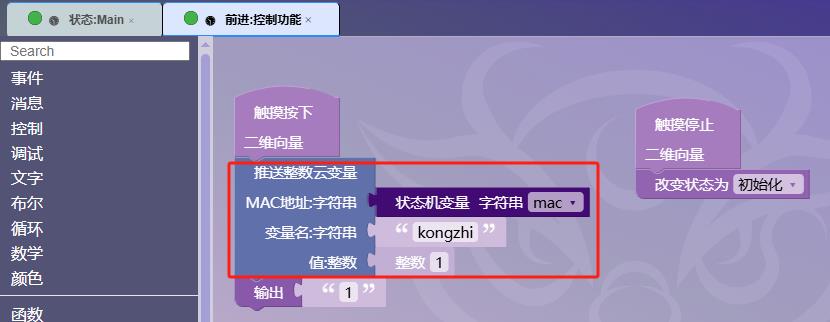
通过云变量推送不同的控制数据


手机端界面 项目小程序二维码
通过扫码项目二维码即可获取如上图所示的手机控制界面,由于该功能需要依赖网络,如果网速较慢控制可能会有延时。
七、增加KIMI图像分析功能:
当检测到有异常画面时,可以通过远程发送消息的方式实现对画面进行分析,并将分析的结果通过讯飞语音平台进行转换,通过语音播报功能将分析结果进行播报。

这部分程序的任务主要是抓取画面,并通过KIMI进行分析;
八、远程语音提醒功能:
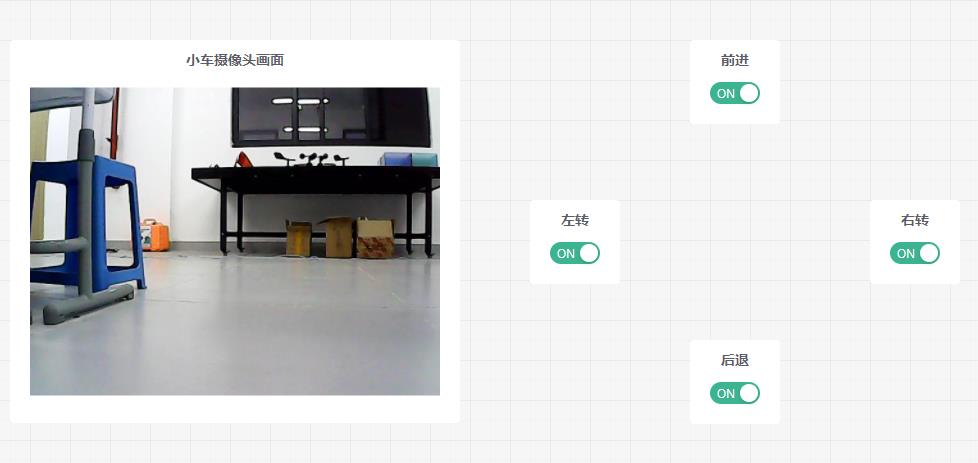
当安保人员通过视频监测画面远程看到一些异常行为时,可通过数据看板远程发送提示语,提醒立即停止不当行为,在这部分功能中主要使用了文本输入的功能,通过局域网进行发送,并将接收到的提示语信息通过讯飞的语音转换功能转换为语音信息,并将通过扬声器进行播报。代码及数据看板如下图所示:

提示语播报功能程序
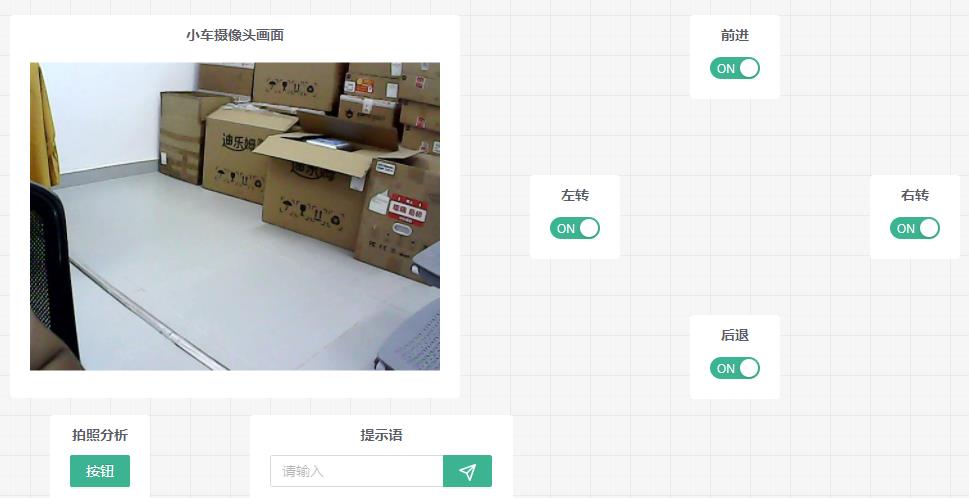
数据面板
九、未来规划:
在后期借助人工智能平台进行异常行为模型训练,并将训练好的模型部署到行空板中,在巡检过程中检测到异常行为时能够自动预警,并将异常信息通过远程回传到控制中心,真正实现智能化巡检工作。
十、总结:
通过本次活动,测试了电源板和新扩展板的功能,自带的电池功能非常方便,能够实现离线运行,特别是一些需要离线运行的场景中,可以非常方便的完成控制任务,扩展板中自带的电机驱动接口能够非常方便实现电机的驱动功能。在项目中使用了局域网中的数据面板功能和外部网络的云变量功能,通过测试验证了两种功能不冲突,为后期进行远程控制和数据大屏项目的落地提供了一种可行的方案,可同时满足局域网和外网两种不同的物联网控制方式,为物联网教学提供了一种新的方案。
附件


 他的勋章
他的勋章
评论