 返回首页
返回首页
 回到顶部
回到顶部
FOBO 是 Project Biped 的第四个原型。它是一个 3D 打印的、独立的、静态平衡的双足机器人。它有 8 个 DOF(自由度),可以在周围环境中走动并使用超声波测距传感器避开障碍物。所有设计、说明、源代码和零件清单均免费提供。FOBO 旨在让任何拥有低成本 3D 打印机并有兴趣学习机器人技术的人轻松制作。
第 1 步:静态行走
FOBO 以静态方式行走,这意味着在动画的每一帧中,它都是平衡的,如果停止,它不会翻倒。行走周期为 10 个关键帧,每帧之间插值 10 帧。
第 2 步:获取零件
FOBO 使用 Arduino Uno 微控制器驱动 8 个伺服电机。它还有一个超声波距离传感器,因此它可以四处走动而不会撞到东西。FOBO 由可充电锂离子电池供电,充满电后可持续使用几个小时。所有零件加起来的成本约为 200 美元。这是零件的完整列表以及供应商、价格和数量的链接。请注意,列出的供应商都不隶属于 Project Biped...他们就是我从那里购买零件的地方。如果您从其他网站找到更便宜的零件,请告诉我,我会更新列表。
第 3 步:打印机器人部件
FOBO 由 17 个 3D 打印塑料部件组成。显示每个零件去向的完整图表列表可以在这里找到,每个零件的所有 3D stl 文件都可以在这里下载。我使用开源的 Makerbot Thing-O-Matic 3D 打印机打印了 FOBO。所有部件都可以在大约 18 小时内打印出来(取决于您的打印机和设置),使用价值约 10 美元的塑料(193 cc 大约是标准塑料卷轴的 1/5)。
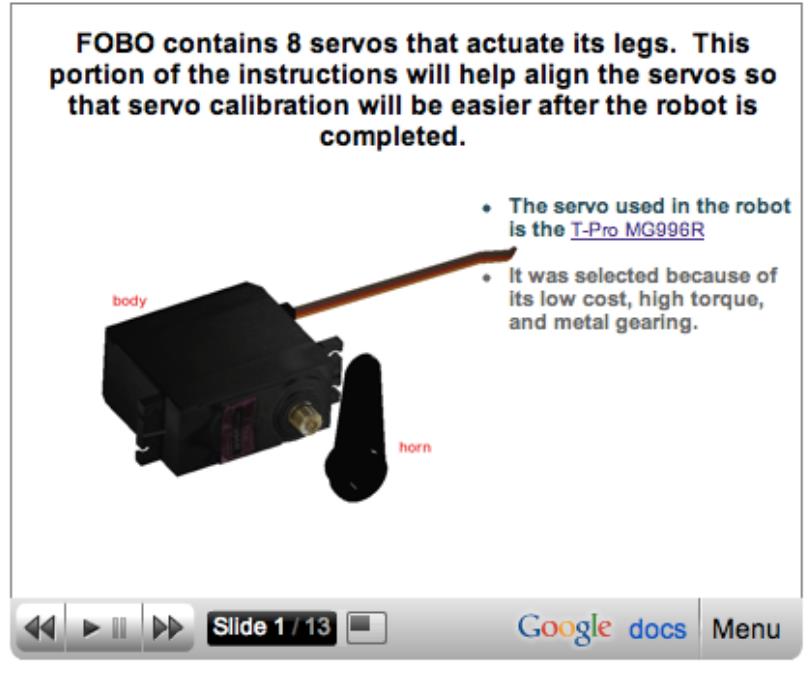
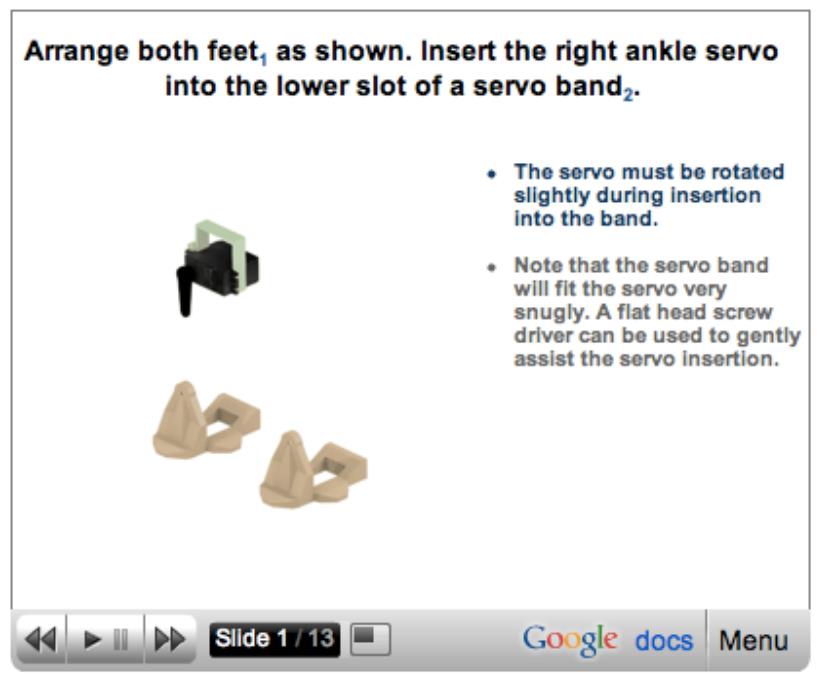
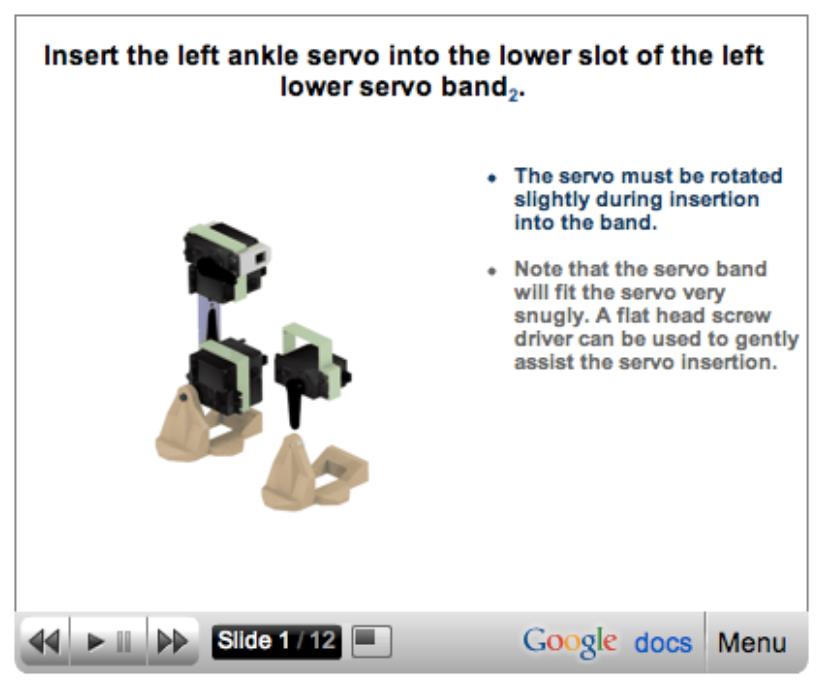
第 4 步:设置伺服器
FOBO 使用 8 个舵机四处移动。这些需要在施工开始前对齐,以便于校准。您可以在此处访问带有动画说明的演示文稿(图像是演示文稿的屏幕截图)。
第 5 步:组装右腿
FOBO 的右腿有 5 个打印部件和以下内容:
4 个伺服器
2 个螺丝 3M 16mm
2 个螺丝 3M 12mm
4 个螺丝 3M 8mm
1 个螺母 3M
您可以在此处访问带有动画说明的演示文稿(图片是演示文稿的屏幕截图)。
第 6 步:组装左腿
FOBO 的左腿有 5 个打印部件,包括:
4 个舵机
2 个螺丝 3M 16mm
2 个螺丝 3M 12mm
4 个螺丝 3M 8mm
1 个螺母 3M
您可以在此处访问带有动画说明的演示文稿(图片是演示文稿的屏幕截图)。
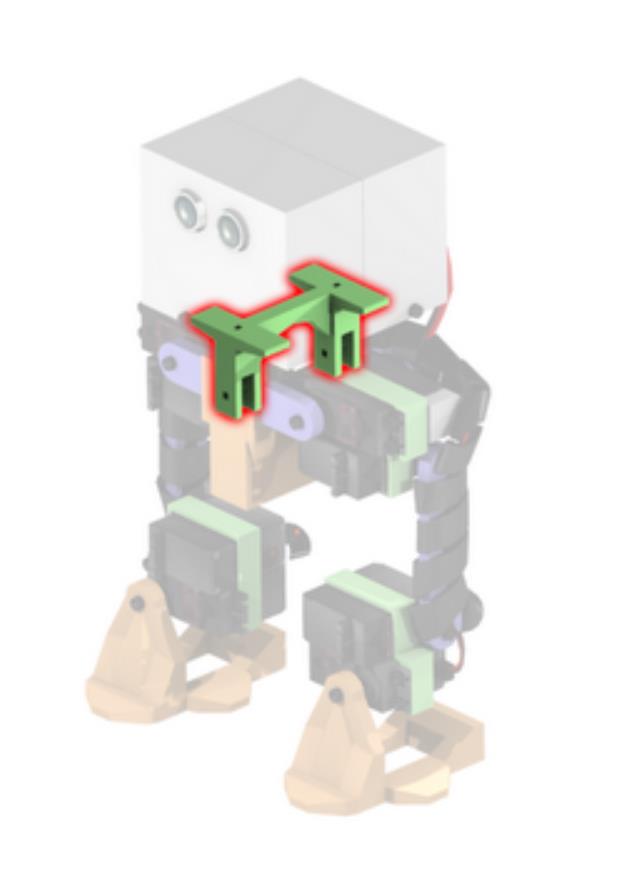
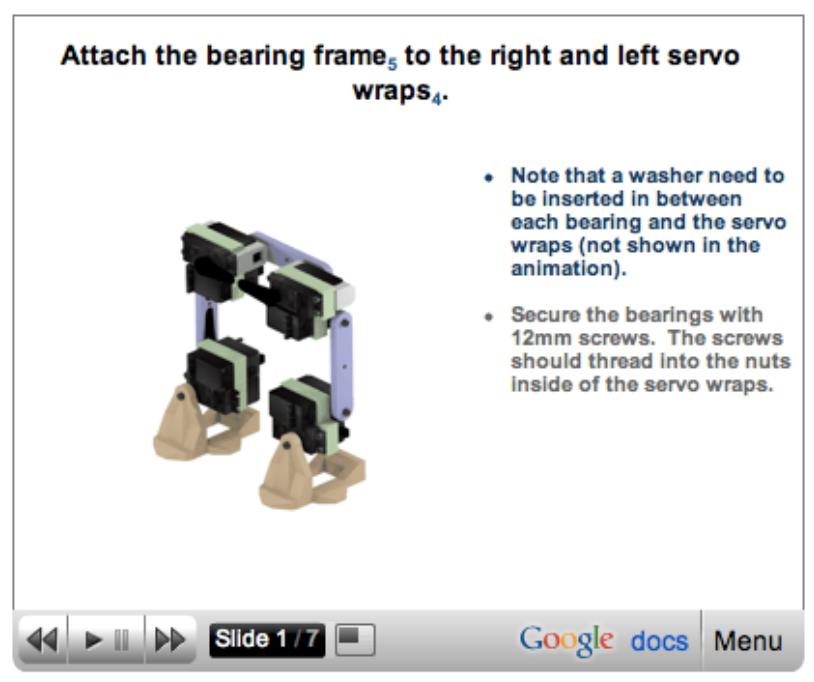
第 7 步:组装框架
FOBO 的框架有 4 个打印部件和以下内容:
2 个径向滚珠轴承
2 个垫圈
2 个螺钉 3M 16mm
6 个螺钉 3M 12mm
4 个螺钉 3M 8mm
1 个 Arduino Uno 板
1 个 Arduino 伺服扩展板
您可以在此处访问带有动画说明的演示文稿(图像是演示文稿的屏幕截图)。
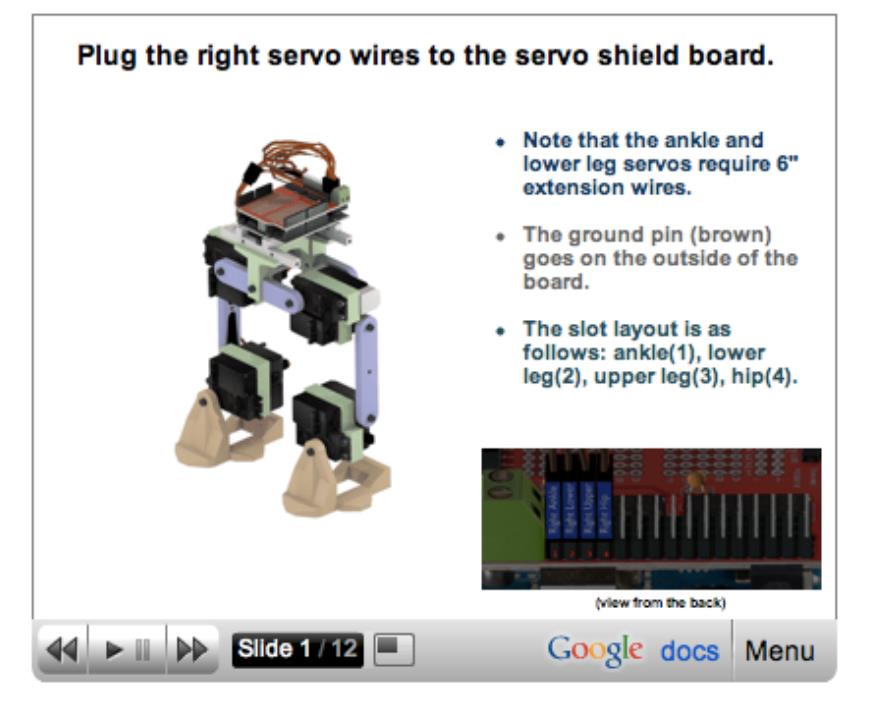
第 8 步:连接电子设备
FOBO有以下电子部件:
4个伺服延长线 6“
2段线包,每个
14” 1个摇杆开关
1个保险丝 5安培
1个直流到直流电压调节器(5v/6v)
3个无焊线连接器(女性)
您可以在此处访问带有动画说明的演示文稿(图片是演示文稿的屏幕截图)。
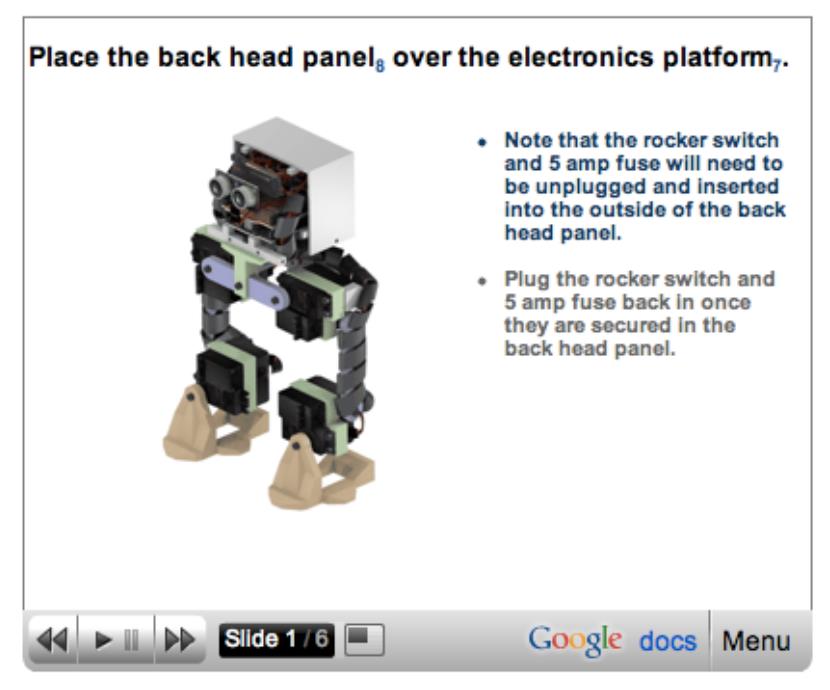
第 9 步:戴上头部和电池盒
FOBO 的头部是两个打印部件,电池盒是一个打印部件。您需要的其他物品:
1 节锂离子电池 2 节 7.4v
4 颗螺丝 3M 20mm
4 颗螺丝 3M 8mm
您可以在此处访问带有动画说明的演示文稿(图片是演示文稿的屏幕截图)。 使用 LIPO 电池时请小心并遵循所有安全说明!
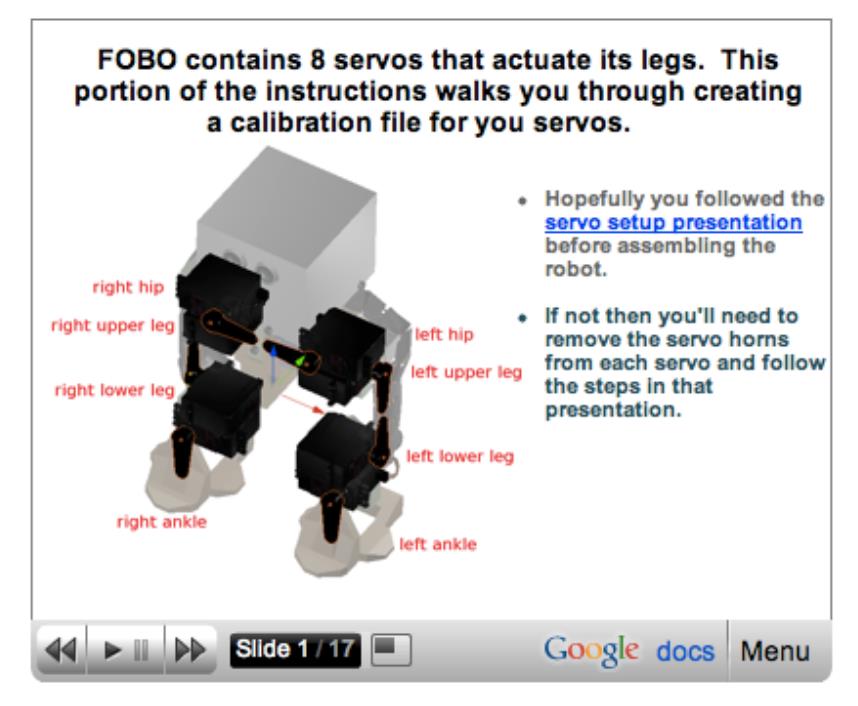
第 10 步:校准舵机
是时候校准 FOBO 的舵机了。这是必要的,因为不可能每个人都以完全相同的方向组装伺服系统。因此,校准描述了特定 FOBO 的唯一伺服偏移量。这允许每个 FOBO 使用其他人创建的作。您可以在此处访问带有动画说明的演示文稿(图像是演示文稿的屏幕截图)。
第 11 步:让 FOBO 漫游!
将导航程序上传到 FOBO,让它四处走动!
【Arduino 动手做】FOBO 双足行走机器人
项目链接:https://www.instructables.com/FOBO-bipedal-walking-robot/
项目作者:jdowdall
相关资料:https://www.projectbiped.com/prototypes/fobo
项目视频 :https://www.youtube.com/watch?v=a3mxUadkLvY&t=2s
项目代码:https://drive.google.com/file/d/19LgbEbkcM_xBNK7gWNbYAnoKVXcJlIrP/view
3D 文件:https://drive.google.com/file/d/1RdmWiYrRVIyfWzqGqXrU2gEJPg9QJcDS/view



 他的勋章
他的勋章

评论