 返回首页
返回首页
 回到顶部
回到顶部
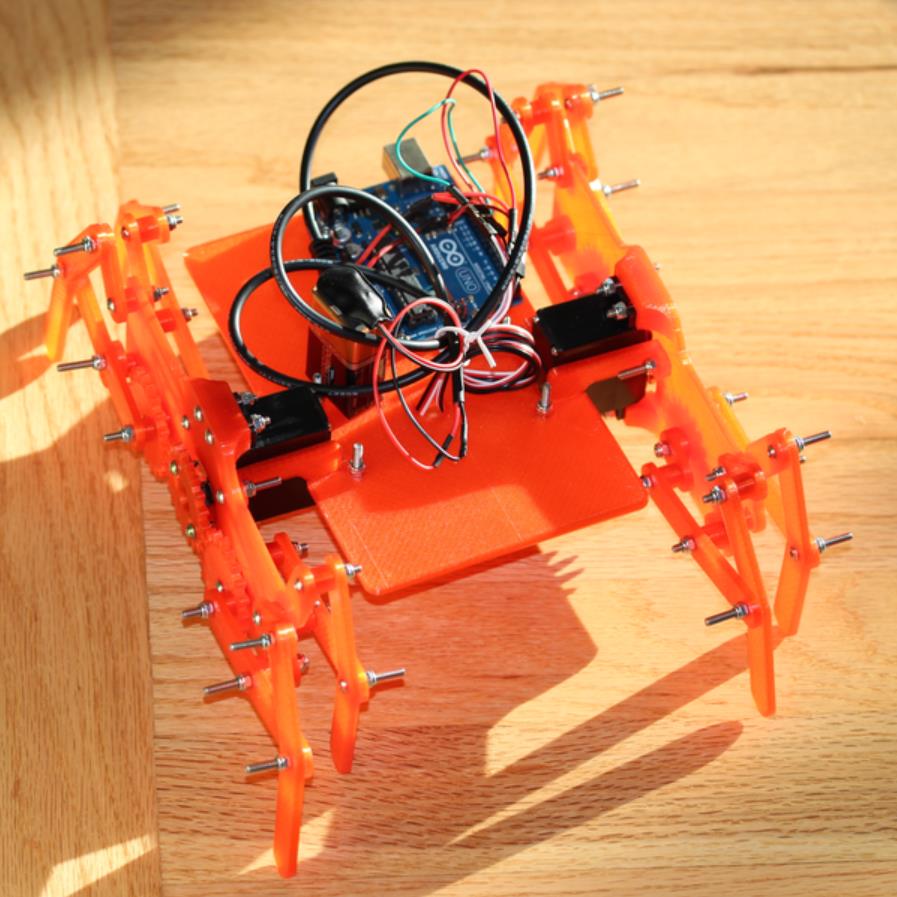
这个步行机器人是我一直想尝试的项目,我终于有时间完成了它,所以现在我与世界分享它!
这个项目的构建相当简单,不需要任何困难的技能或大型工具(除了 3D 打印机)。9V 电池夹与同轴插头的焊接量很小,但仅此而已。
它全部由我拥有的两个连续旋转伺服系统提供动力,它们由 Arduino Uno 控制,它可以极大地扩展机器人的功能,超出此 Instructable 中显示的功能,并带有一些插件。
这也是我的第一个 Instructable!因此,如果您对如何改进此 Instructable 或我将来制作的 Instructables 有任何评论,请告诉我。
第 1 步:您需要什么
所需条件
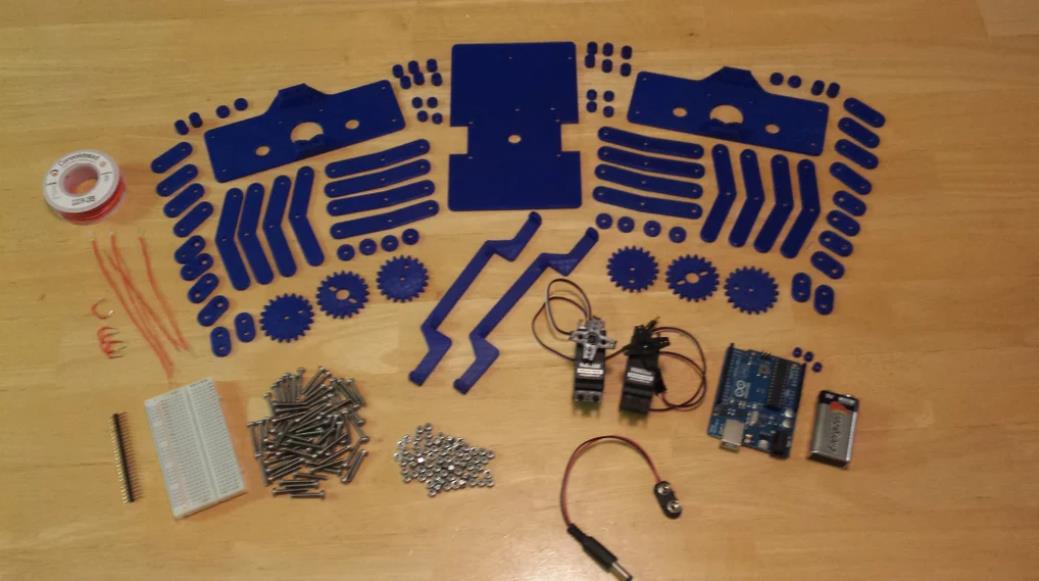
我围绕着我周围的零件设计了这个机器人,我在下面列出了这些零件。您可能可以用其他部分替换其中一些部分。我已在此 Instructable 中附加了每个部分的 3D 模型,以便您可以根据自己的喜好对其进行修改。
硬件
M3x20螺丝(~70x) -- (McMaster-Carr)
M3锁螺母(~70x) -- (McMaster-Carr)
电子
Arduino Uno -- (Amazon)
连续旋转伺服器(2x) -- (视差)
无焊面包板 -- (所有电子产品)
9V电池
9V电池卡扣 -- (所有电子产品)
跳线 -- (所有电子产品)我只是使用了我身边的一卷实心连接线。
1x40 接头 -- (所有电子元件)
2.1mm Co-Ax 电源插头 -- (所有电子元件)
工具
螺丝刀
3D 打印机*
带焊料的烙铁(参见步骤 10,可能没有必要)
*如果您没有 3D 打印机,您可以让其他人为您打印。例如 3DHubs 或 Ponoko
当然,在这些东西中,您还需要 3D 打印部件,这些部件在第 3 步中提供。
第 2 步:联系
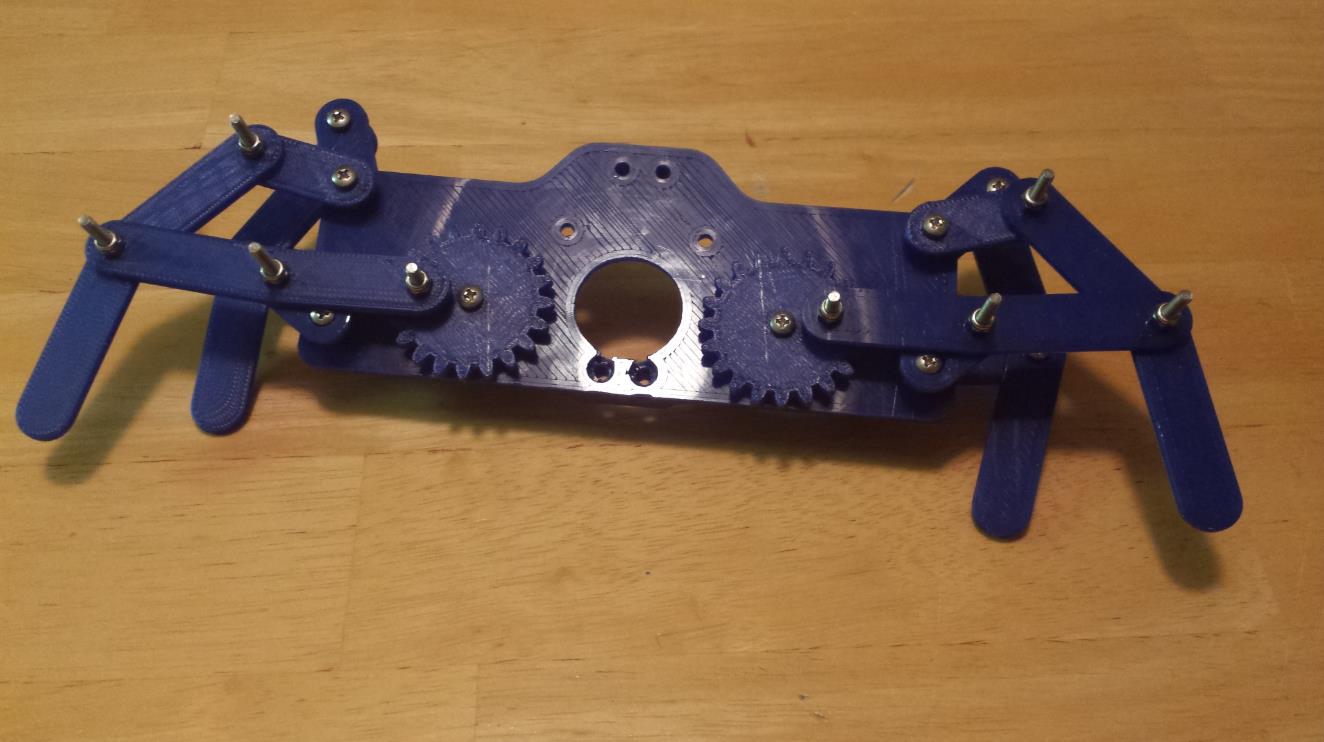
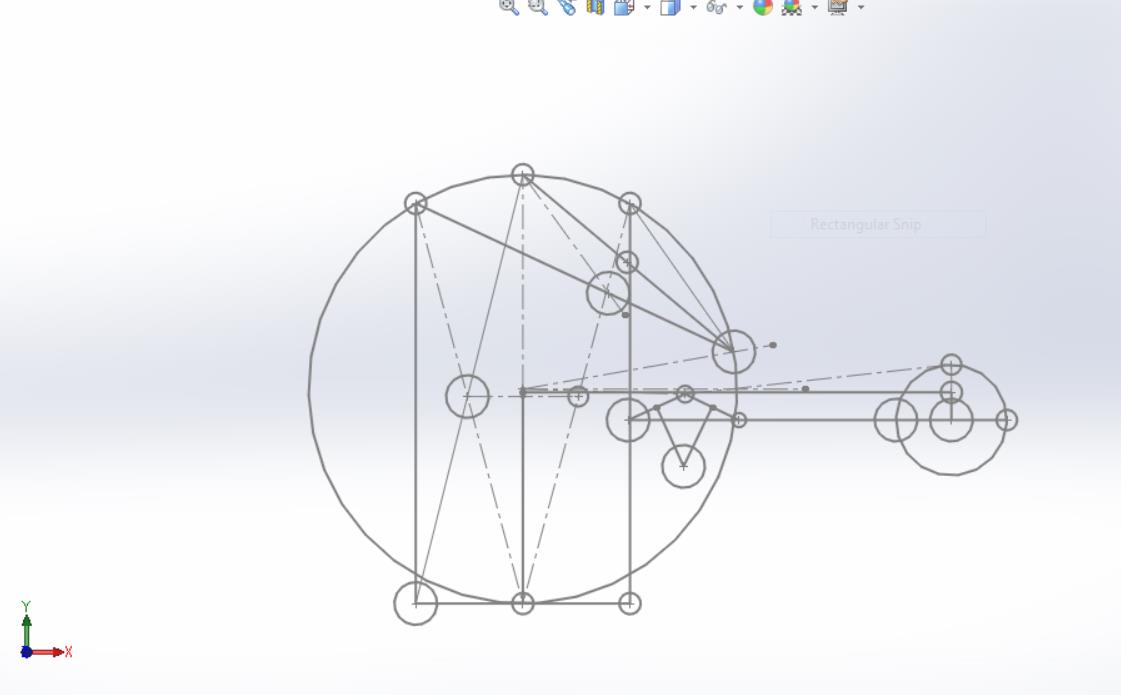
这个机器人中使用的链接被称为 Joe Klann 创建的 Klann 链接,您可以在 http://www.mechanicalspider.com 上找到有关他的链接的大量信息。我在 BEST 机器人比赛中的一位导师向我介绍了 Klann 联动装置(在此处查看他自己的机器人使用此联动装置),由于事实证明它太复杂了,无法用我们有限的材料和时间制作,因此我们无法在我们的机器人中使用它。比赛结束后,我决定尝试使用这种连杆机构制作自己的机器人。
我对如何创建自己的 Boss 进行了更多的研究。但我也发现,没有很多说明或预制模型供机器人自己制作。所以我想为什么不做一个,然后把说明发给任何想做的人呢。
该链接是完全可定制的,并且可以使用此处的启用文本在任何 2D 草图绘制工具上进行设计。如果连杆的规模很小,我不建议在纸上手工设计一个,因为一些点可以非常接近。
我在 Solidworks 中创建了我的链接,并附上了每个零件的 3D 模型,如果您想根据自己的需要对其进行自定义。
附件
下载 {{ file.name }}SolidWorksModels.zip下载
下载 {{ file.name }}WalkingRobot_IGESPack.zip下载
第 3 步:打印零件
打印部件时没有任何特殊要求。但以下是我用于打印我的一些参数:
切片机:MatterSlice
层高:.25mm
材质:PLA
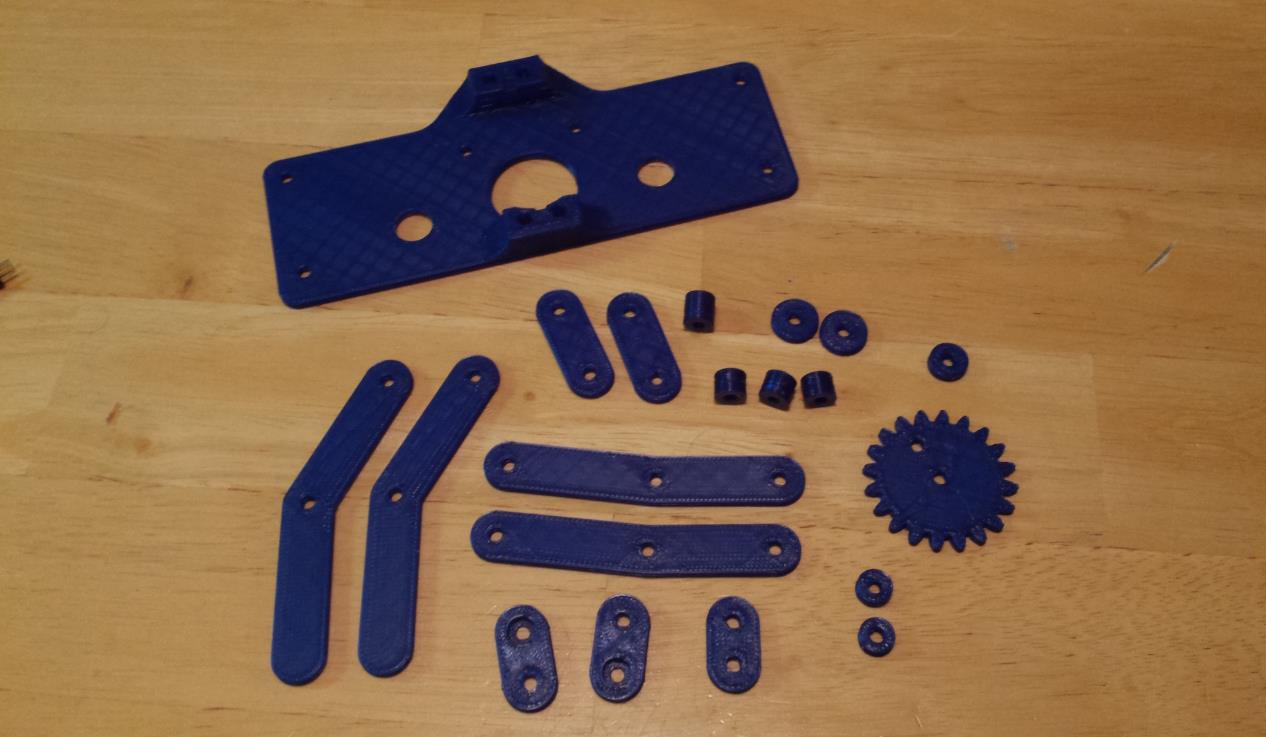
以下是您需要的每个零件的数量。
机器人的核心:
1x 平台
2x LinkageConnector
2x LinkageFrame
4x ArduinoStandoffs
注意:每个 LinkageFrame 都有 2 个镜像的链接集。
对于一个连杆组,您需要:
2x 腿
2x PowerLink
2x TopRocker
1x 底部摇杆
1x 底部摇杆内
1x 惰轮
1x 齿轮
1x 曲柄
3x 7mm 垫片
1x 9mm 垫片
2x 4mm 垫片
2x 3mm 垫片
附件
下载 {{ file.name }}WalkingRobotSTLPack.zip下载
第 4 步:连杆组件:检查惰轮配合
连杆组件:检查惰轮配合
检查以确保惰轮适合并且可以自由旋转,而不会在连杆框架的插槽中晃动。根据您的打印件,您可能需要从插槽中切掉一点塑料,以获得惰轮的平稳旋转。
用螺钉和锁紧螺母组装连杆机构时,要确保不要将接头拧得过紧。您希望每个关节都能轻松移动,不要太粘也不要太松。
第 5 步:连杆组件:组装支腿和 PowerLink
接下来,将连杆框架的外侧和内侧的支腿和动力链杆组装在一起。连接时,请记住将支腿放在 Powerlink 后面。
第 6 步:连杆组件:顶部和底部摇杆
连杆组件:顶部和底部摇臂
连杆组件:顶部和底部摇臂
将顶部和底部摇键连接到各自的支腿和 Powerlink 组件上。
内部底部摇臂只有一个用于螺钉的埋头孔,而另一个用于外部的底部摇臂将有两个埋头孔。
内部底部摇杆与 Powerlink 由 9 毫米垫片隔开。顶部内侧摇杆与支腿之间由 7 毫米垫片隔开。
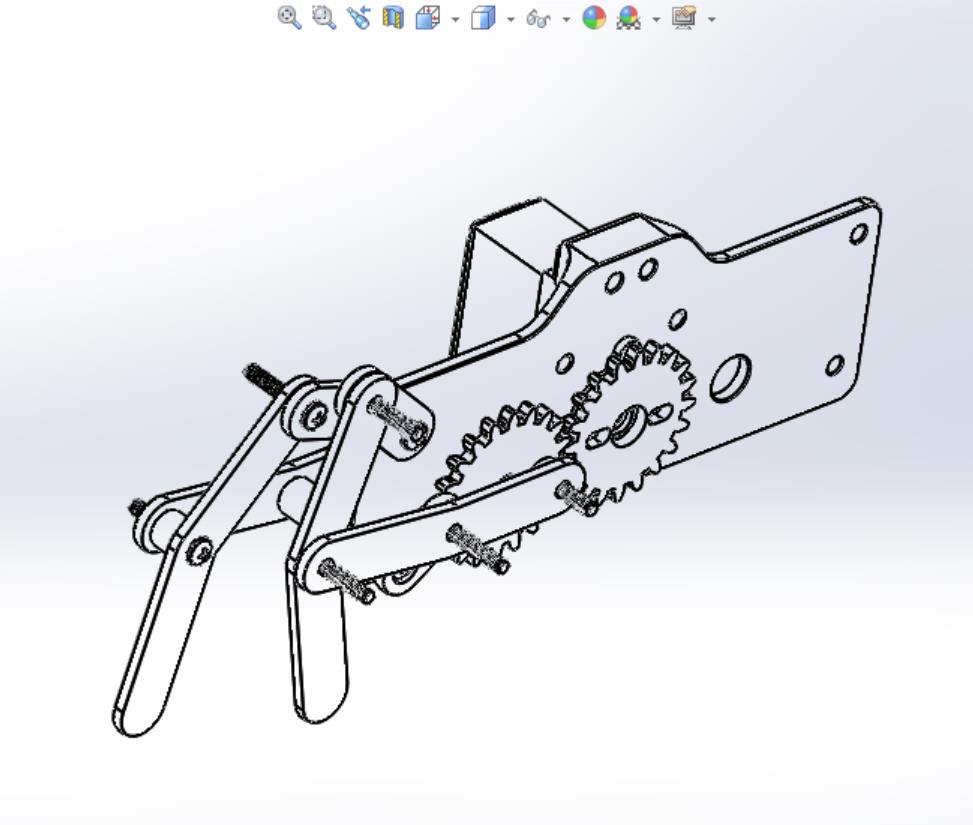
第 7 步:连杆组件:连接齿轮和曲柄
将齿轮和曲柄连接到各自的连杆组件上。齿轮与 powerlink 由 4 mm 垫片隔开,曲柄与 Powerlink 由 7 mm 垫片隔开。
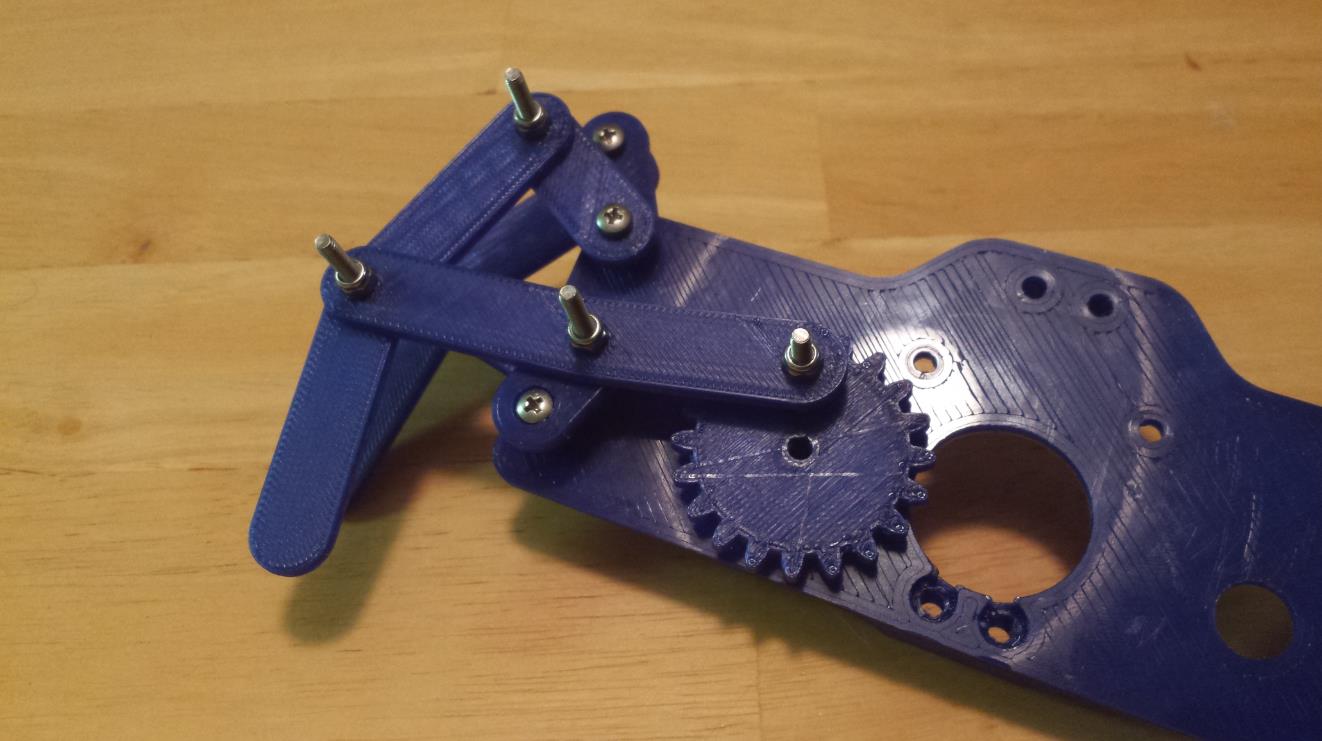
第 8 步:Linakge 组件:将连杆拧紧在一起
将顶部和底部摇杆连接到框架上,并将螺钉从外部连杆插入,将两个连杆连接到连杆框架。外部连杆机构的底部摇杆和顶部摇杆由用于底部摇杆的 7 毫米垫片和用于顶部摇杆的 4 毫米垫片与框架隔开。
接下来,首先将惰轮放入槽中,用 3 毫米垫片将齿轮和曲柄与惰轮和框架分开,每侧一个,将两个连杆系在一起。为了将它们放在一起,用螺栓和锁紧螺母拧紧整个车轴组件(齿轮->3mm垫片->惰轮->3mm垫片->曲柄),这样当齿轮旋转时,曲柄也会旋转,使它们合二为一。
将它们拧紧在一起时,请确保曲柄和齿轮的方向如图所示。因此,在 powerlink 连接到齿轮的位置,位置正对着内部连杆的 powerlink 连接到曲柄的位置。
完成所有作后,您现在已经完成了一套连杆,并且可以在连杆框架的另一侧工作。步骤都是一样的,唯一的区别是它是镜像的。
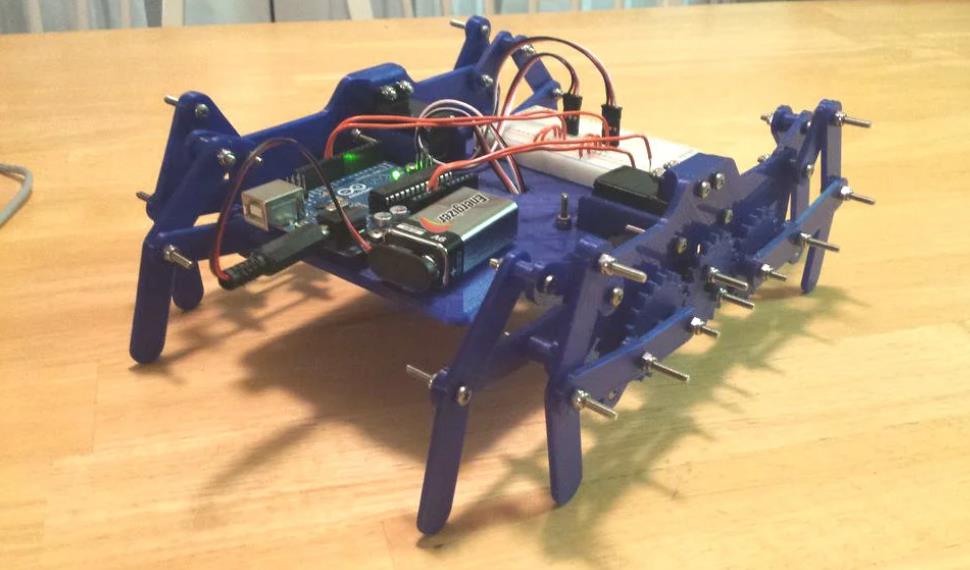
第 9 步:将它们放在一起
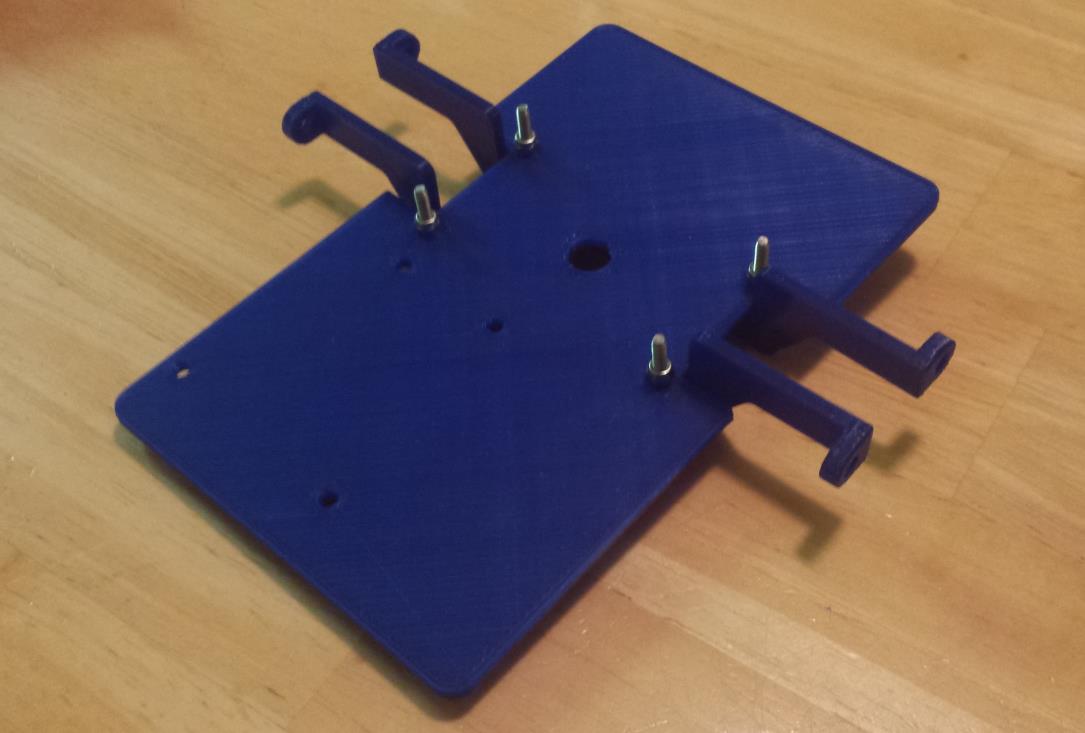
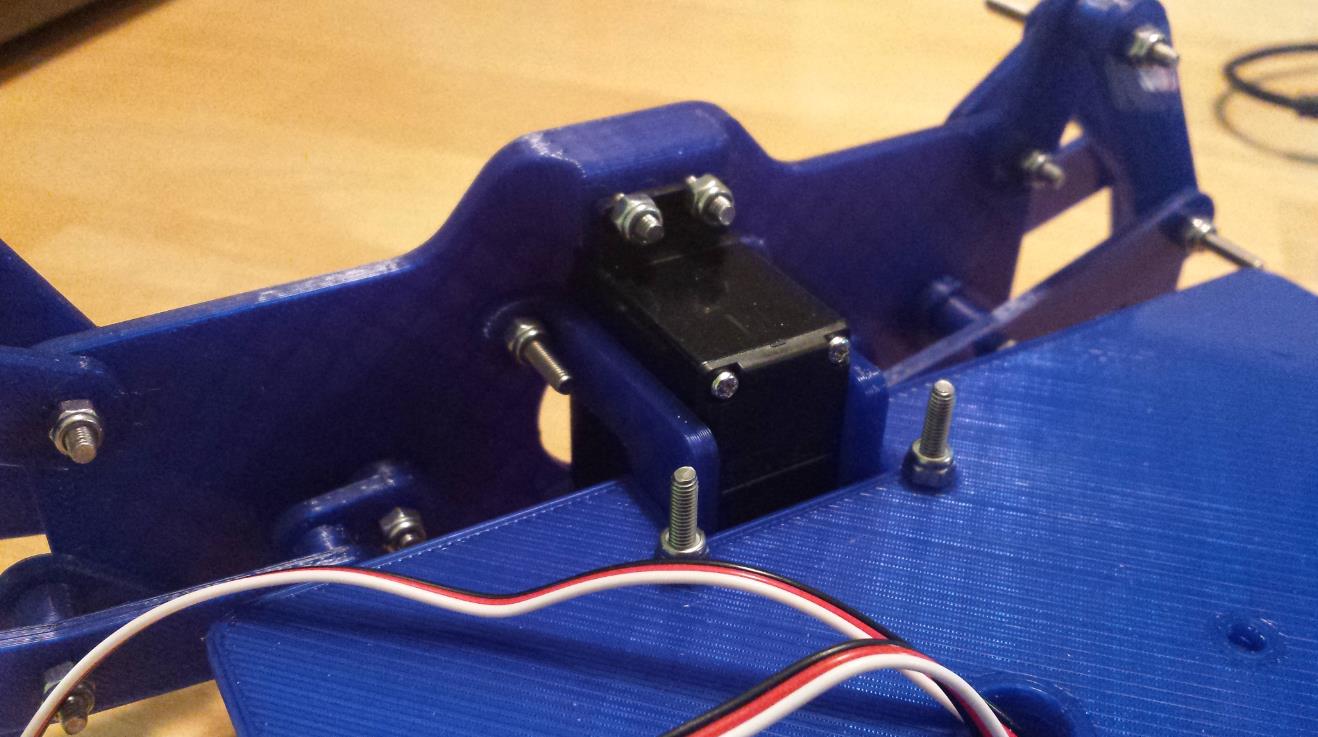
用 4 个螺钉将伺服器连接到每个连杆框架上。
如图所示,两个连杆框架与两个联动连接器连接,平台连接到联动连接器。
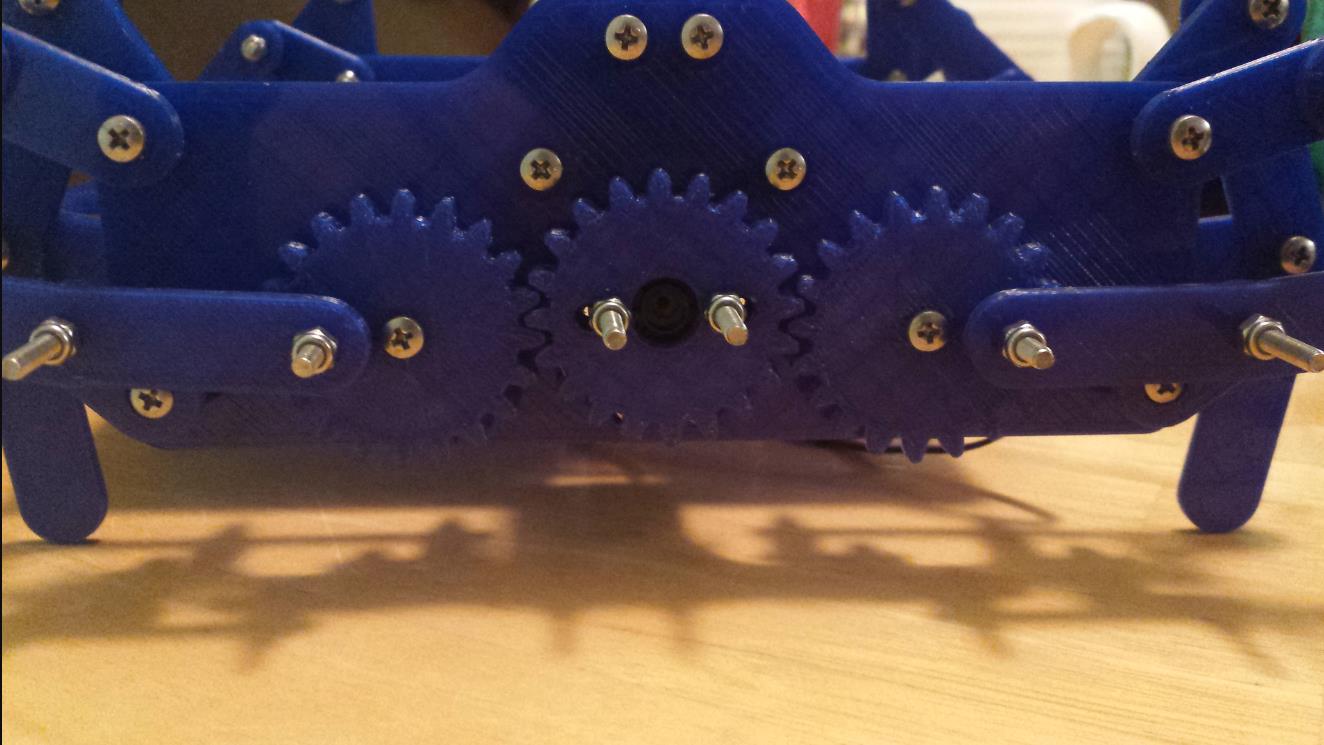
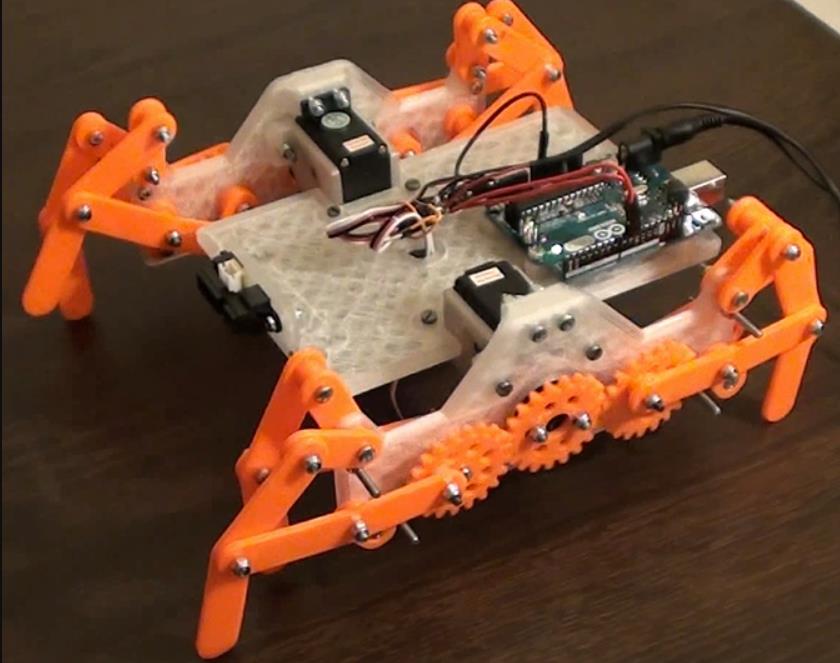
伺服喇叭和齿轮
伺服器随附的 4 臂伺服喇叭可以正常工作,但您需要夹住尖端才能正常工作。如果你有一个圆形的伺服喇叭,那也会很好用。如图所示,中心齿轮和伺服喇叭用 2 个螺钉固定。
注意:在将伺服喇叭和齿轮连接到伺服器之前,请确保框架两侧的齿轮对齐,以便在放置齿轮和伺服喇叭时它们相对于其方向的位置相同。还要确保在放入两个中心齿轮时,左侧和右侧也处于相同的方向。
警告:与任何机器人一样,请小心齿轮等运动部件。当我把手指放在错误的地方捡起来时,我捏了自己一两次,而它还在移动。
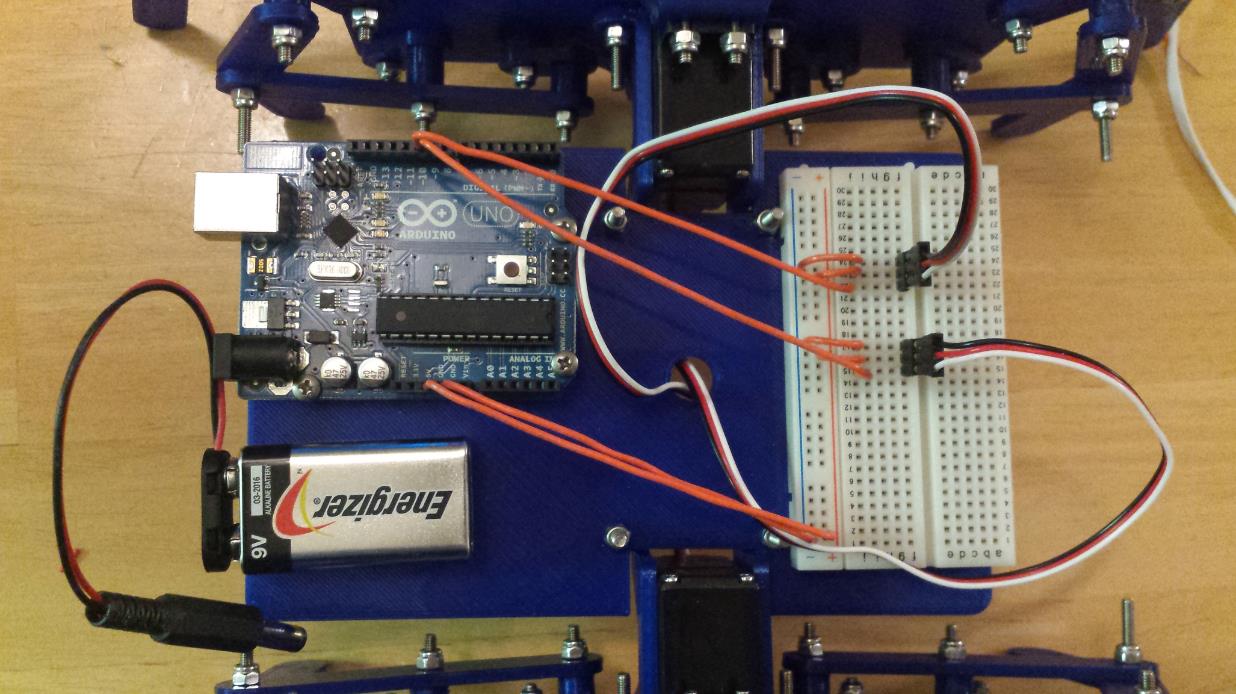
第 10 步:电子和编程
电子学
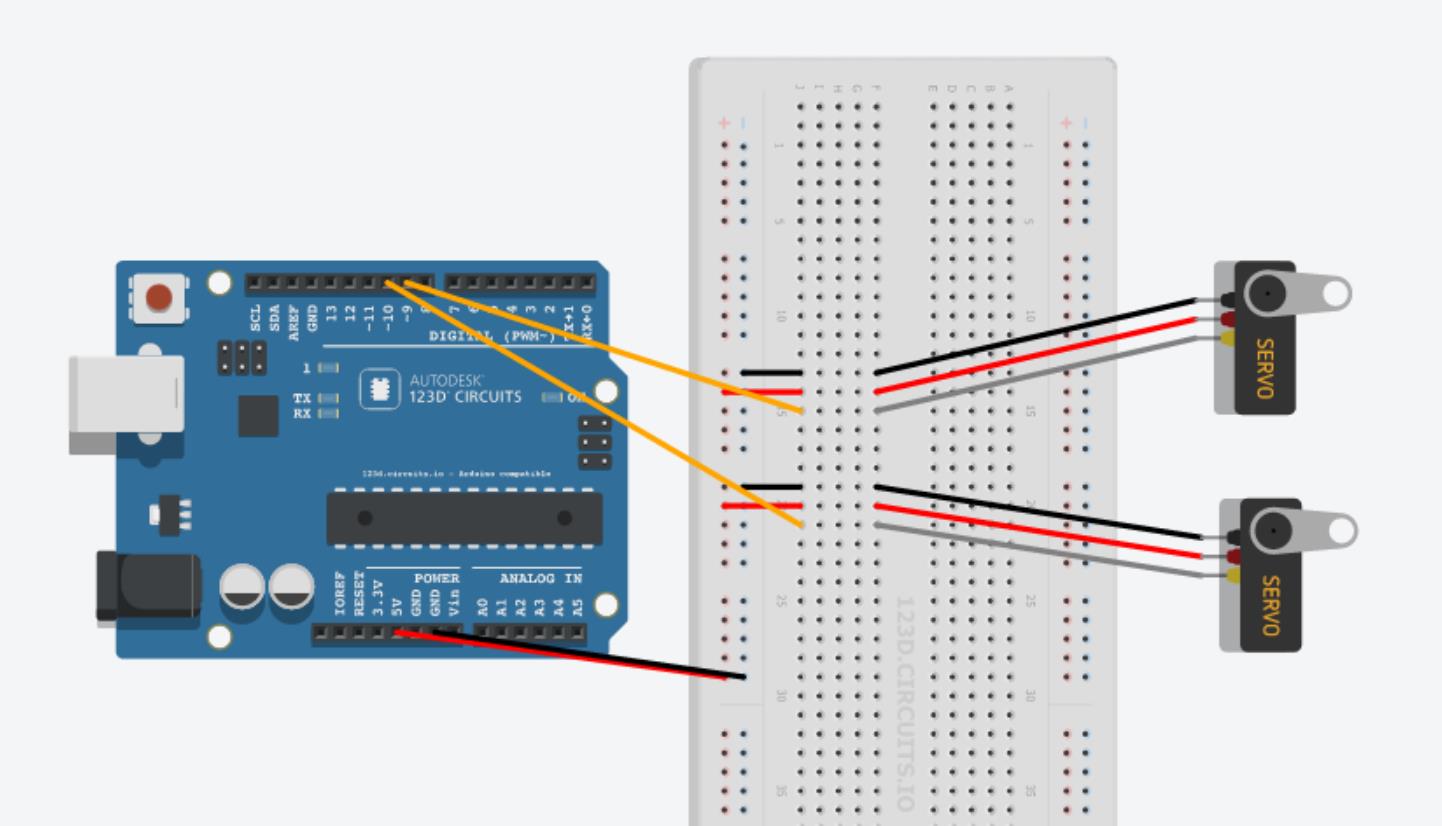
电子设备非常简单,只需将相应的电线连接到相应的伺服器上,依此类推。伺服连接器还需要一个 1x3 接头,以将它们连接到无焊试验板。只需断开一小部分并连接即可。
需要注意的一点是,机器人实际上没有任何正确的方向。因此,您可以将您想要的任何一端作为正面,只需记住更改舵机连接的引脚号(如果更改)即可。
使用您自己的支架将 Arduino 连接到平台,或从提供的文件中 3D 打印您自己的支架。
如图所示,将 9V 电池夹焊接到同轴插头的正确引线上。您不一定需要使用同轴电缆为所有设备供电。如果您愿意,您可以通过板上的 GND 和 Vin 引脚为其供电。
编程
编程并不多,只有 Arduino Uno 和伺服系统,您就非常局限于它自己转向。要对机器人进行编程,只需在循环中键入您希望它执行的移动,然后是您希望它执行该移动的一定时间延迟。
大功告成!
项目代码
#include <Servo.h>
#define LeftServoPin 10 //Sets the left servo to pin 10
#define RightServoPin 9 //Sets the right servo to pin 9
Servo LeftServo;
Servo RightServo;
void setup()
{
pinMode(LeftServoPin, OUTPUT);
pinMode(RightServoPin, OUTPUT);
LeftServo.attach(LeftServoPin);
RightServo.attach(RightServoPin);
}
void loop()
{
//Program your movement sequence here
Forward(); //Moves forward
delay(7000); //Wait 7 seconds
TurnRight(); //Turns right
delay(10000); //Wait 10 seconds
Forward(); //Moves forward
delay(7000); //Wait 7 seconds
}
/*
MOVEMENT FUNCTIONS BELOW
0 = full speed counter-clockwise rotation
90 = Stops the servo from moving
180 = full speed clockwise
*/
void Forward()
{
LeftServo.write(0);
RightServo.write(180);
}
void Reverse()
{
LeftServo.write(180);
RightServo.write(0);
}
void Stop()
{
LeftServo.write(90);
RightServo.write(90);
}
void TurnLeft()
{
LeftServo.write(0);
RightServo.write(0);
}
void TurnRight()
{
LeftServo.write(180);
RightServo.write(180);
}【Arduino 动手做】Klann Linkage:3D 打印步行机器人
项目链接:https://www.instructables.com/3D-Printed-Walking-Robot-Klann-Linkage/
项目作者:Bit-Boy
项目视频 :https://www.youtube.com/watch?v=INjZ6gpW_VE
项目代码:https://content.instructables.com/FP2/COIN/I4LKOIAT/FP2COINI4LKOIAT.txt
3D 文件:
https://content.instructables.com/FTT/L87D/I4LKITC3/FTTL87DI4LKITC3.zip
https://content.instructables.com/F3A/C5UQ/I67SC1EN/F3AC5UQI67SC1EN.zip
https://content.instructables.com/F27/E9RR/I4LKIP77/F27E9RRI4LKIP77.zip


 他的勋章
他的勋章


评论