 返回首页
返回首页
 回到顶部
回到顶部
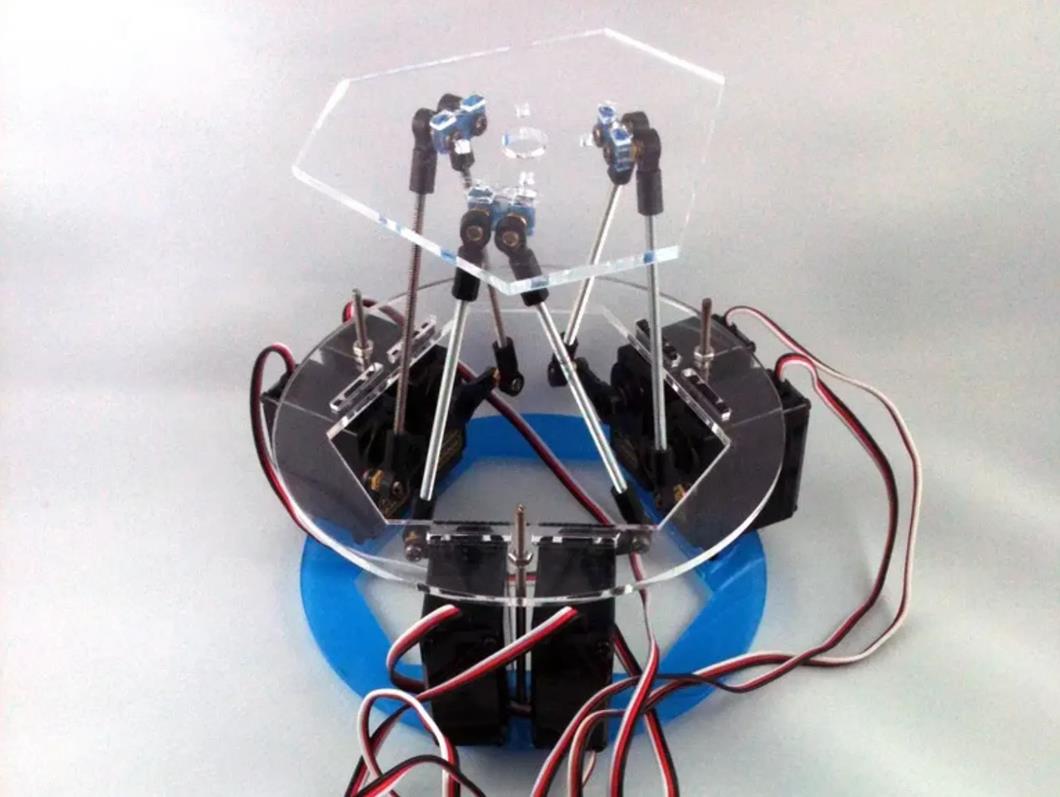
面向学生的 Rotary Stewart 平台。
有时,创造就是唾手可得的果实。我已经有一个 Rotary Stewart Platform (http://www.thingiverse.com/thing:64396),而且我对 Kerbal Space Program 很感兴趣。我想如果我能制造一个 6DOF纵杆,也许我可以在轨道交会方面做得更好。也许它也可以在 Minecraft 或 Descent 中工作。
如果您使用我的设计之一,请告诉我!我很想看看你用它做了什么,并与其他感兴趣的人分享。
如果有人能帮助改进这个机器人的运动学,那就太好了。正向运动学超出了我的数学技能,它们对于使纵杆完整至关重要。
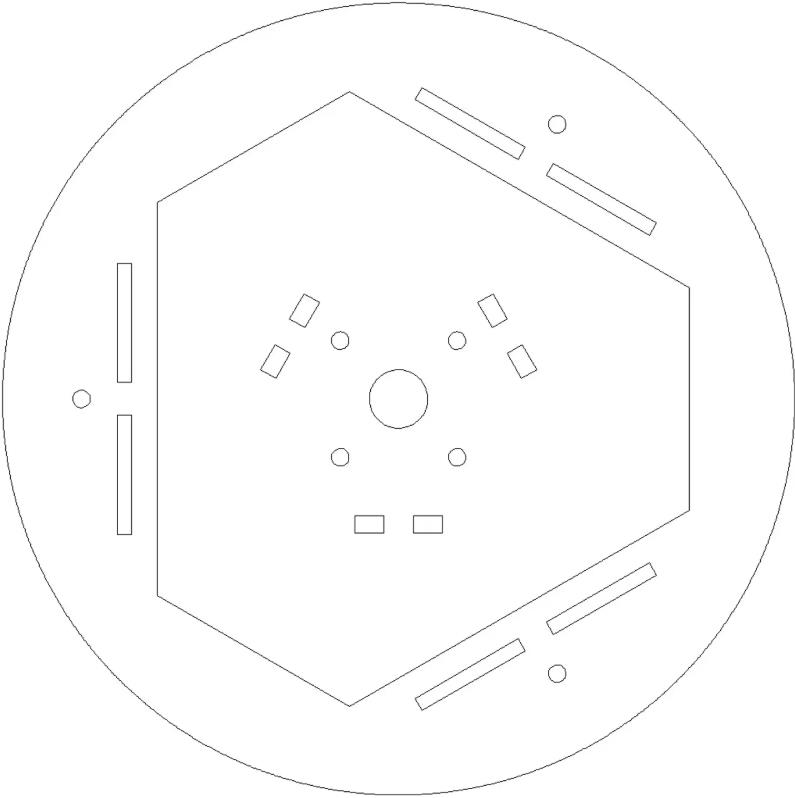
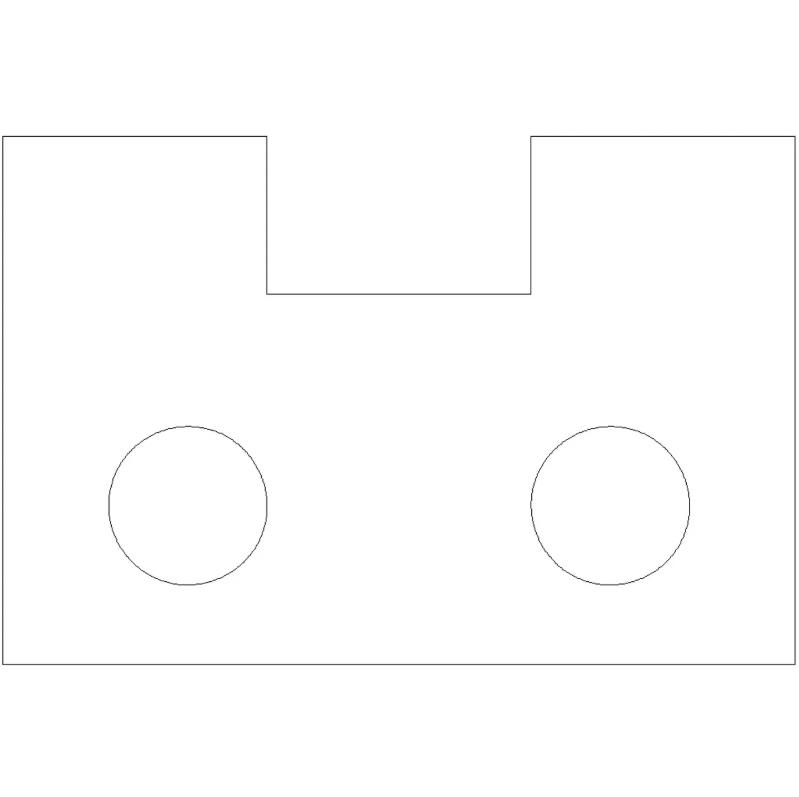
• 从https://www.marginallyclever.com/获取零件套件或激光切割此设计。您将需要两个帧、一个末端执行器 1 和三个末端执行器 2。
• 获得三个 TAMIYA 70171 套件。将 M3 棒切成两半。
• 修改舵机:拆下 PCB,将电位计直接连接到电缆上。
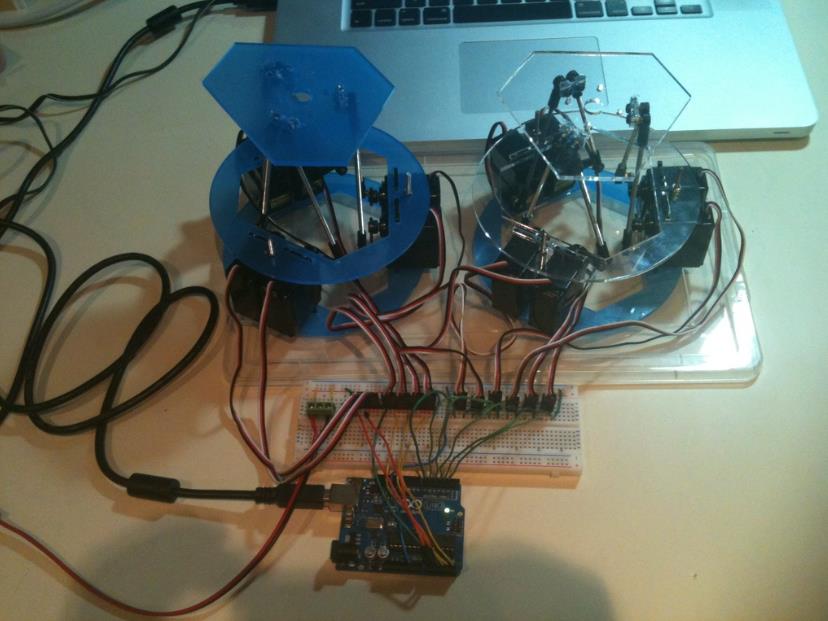
• 按照你在图片中看到的组装。完成后,您将有一个额外的末端执行器板。使用额外的 M3 杆将两个框架板夹在一起,将伺服器固定到位。
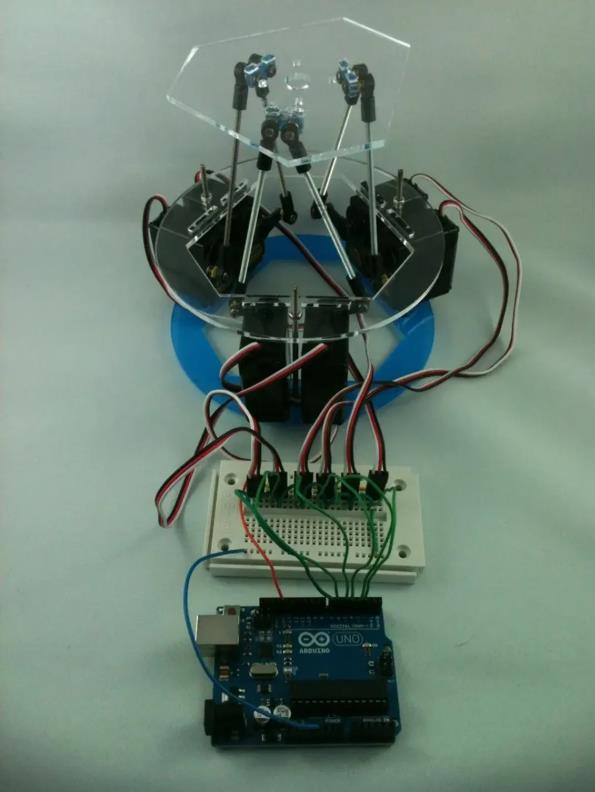
• 上传固件
• 从一个 Stewart 平台驱动另一个平台
附录
【Arduino 动手做】六舵机自平衡 Rotary Stewart 平台
项目链接:https://www.printables.com/model/178534-rotary-stewart-platform-v1
项目作者:丹·罗耶
参考资料:https://www.marginallyclever.com/
项目视频 :http://www.youtube.com/watch?v=rhuM6Cnn5Pk
项目代码:https://github.com/MarginallyClever/RotaryStewartPlatform/
3D 文件:https://www.thingiverse.com/thing:64396
https://www.printables.com/model/178534-rotary-stewart-platform-v1/files


 他的勋章
他的勋章

评论