 返回首页
返回首页
 回到顶部
回到顶部
通过这个例子,我们展示了如何使用 PTHAT 和 Raspberry Pi 来控制并联 SCARA 臂。
我们现在已经在 Hackster.IO 上为 Pulse Train Hat 创建了一个平台,如果您能成为会员来帮助我们,那么这将对我们有很大帮助,因为我们需要 25 名会员才能让它成为特色。
https://www.hackster.io/pulse-train-hat
PTHAT 使用即时命令控制平行 Scara 臂
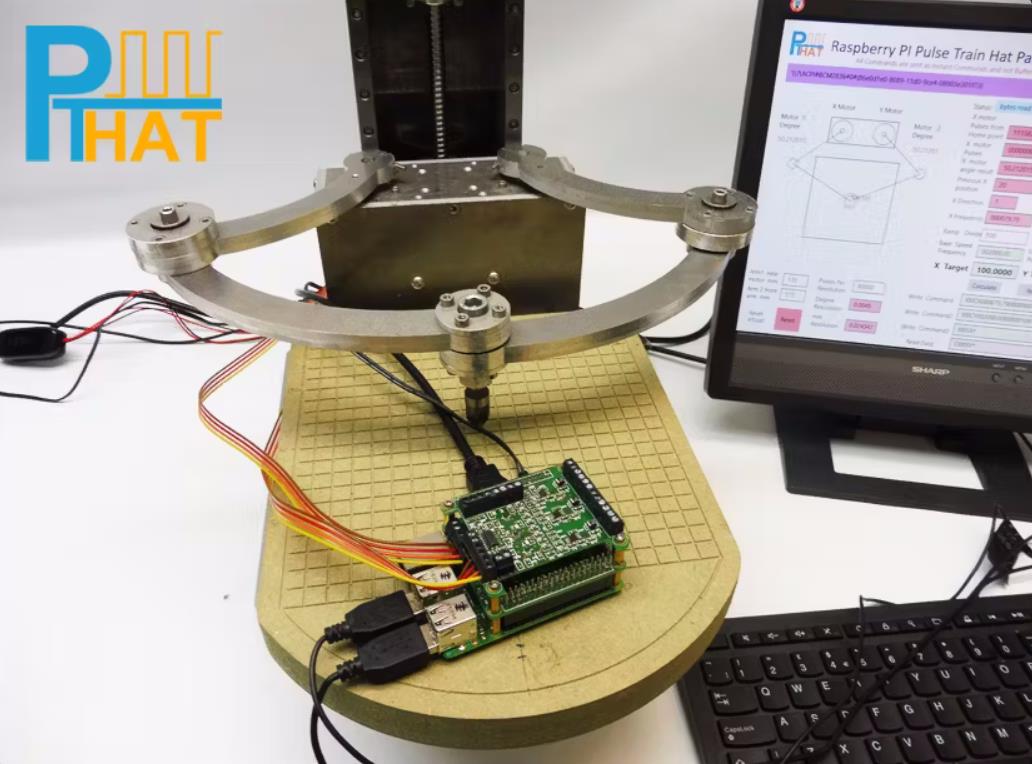
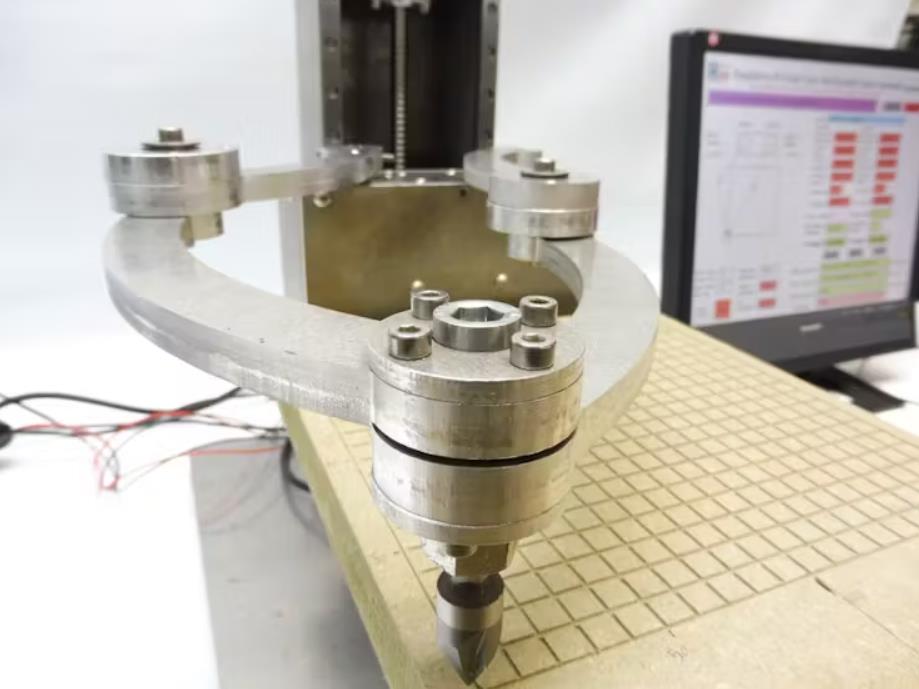
通过这个例子,我们展示了如何使用 PTHAT 控制平行 Scara 机械臂。
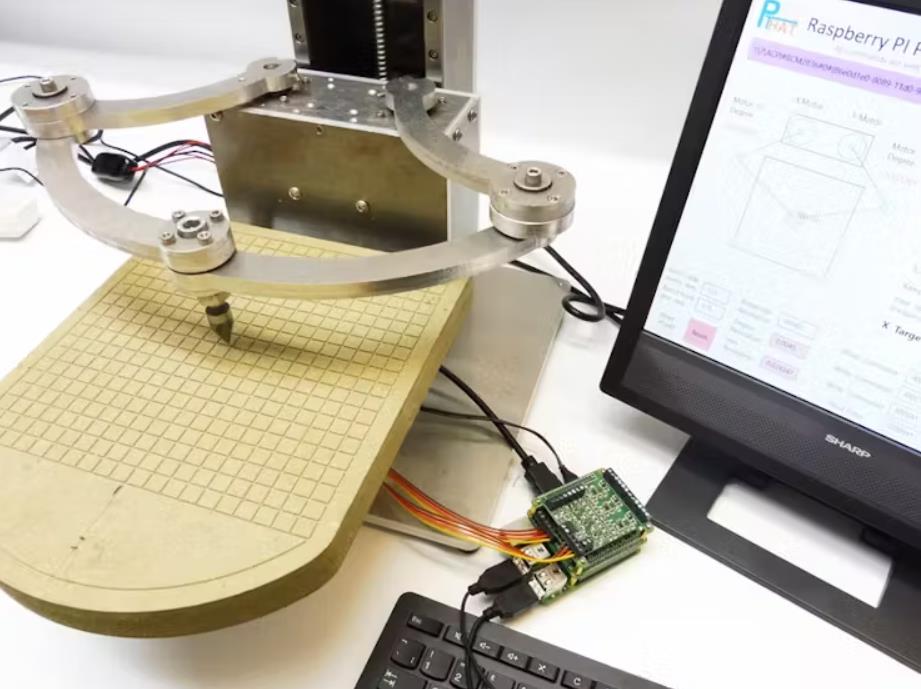
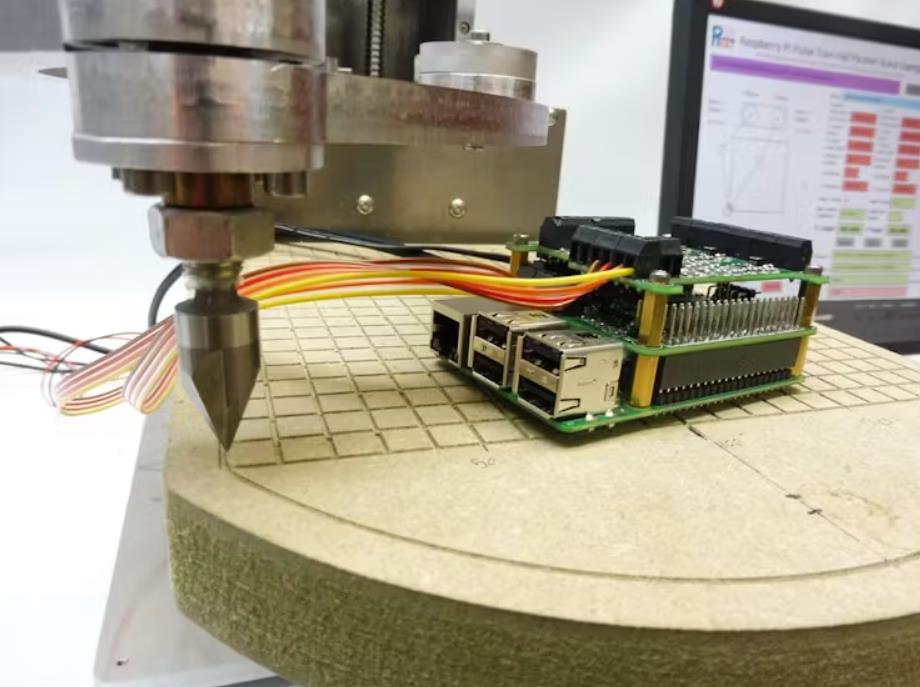
Parallel Scara 是我们的原型机器之一,其设置了 200mm x 200mm 的工作区域。
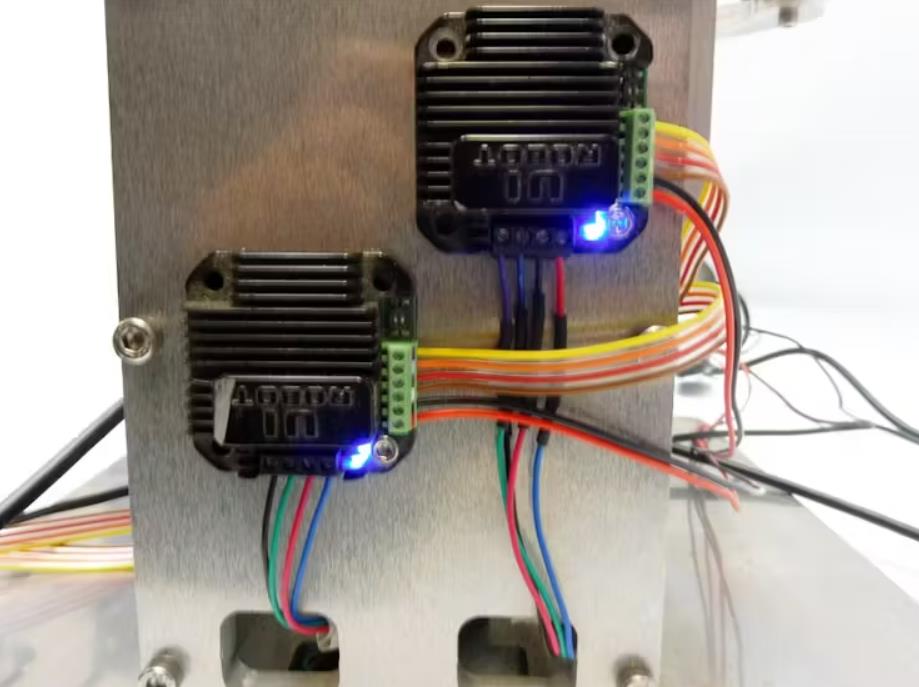
在软件中,您将看到每转脉冲数设置为 80'000 个脉冲,因为我们使用了 50:1 谐波变速箱和设置为 1600 微步的步进驱动器。
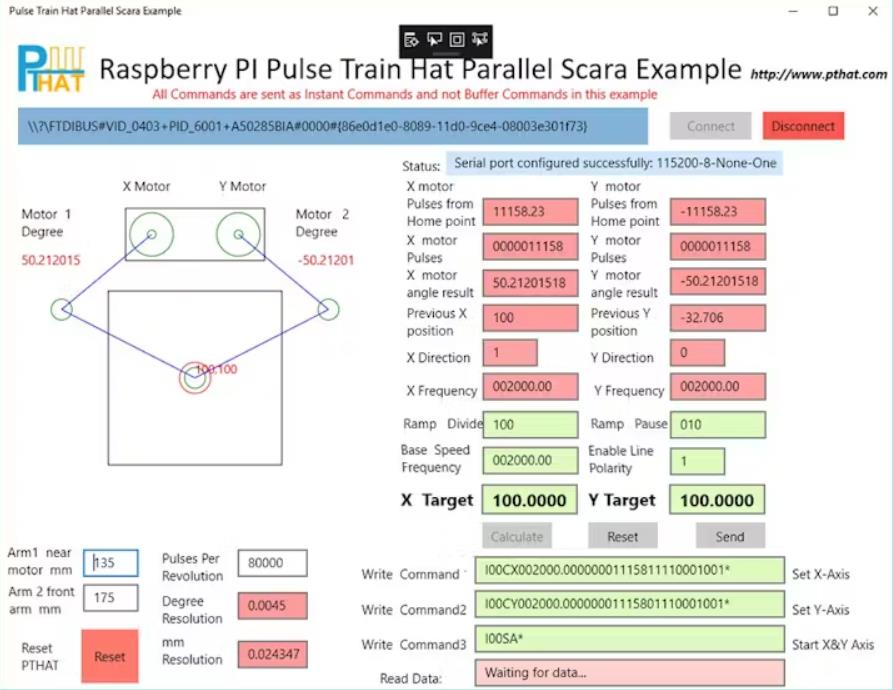
在应用程序中,首先单击“连接”按钮连接到您的 Raspberry PI 串行端口。
确保您的平行 Scara 臂已设置为原位,然后单击“重置”按钮。
现在设置目标运动 X 和 Y 轴,然后点击“计算”按钮。它不会绘制手臂最终的位置,而是进行所有逆运动学计算,以获得两个电机的最终脉冲和方向结果。
现在最后单击“发送”按钮,它将发送将手臂移动到目标设置的命令。
观看下面的视频将会有更好的概述。
本例中使用的命令是:
设置轴命令启动轴命令请求当前脉冲计数命令重置 PTHAT
在本视频中,我们概述了我们提供的用于控制平行 Scara 机械臂的示例软件。
最终开发人员可以轻松修改此示例来构建自己的应用程序。
示例应用程序是在 Visual Studio 2015 中开发的,可以与 Raspberry PI 上的 Windows 10 IOT 一起使用,或编译为 x86/x64 以在 PC 上使用。该示例已用 C# 编写为通用 Windows 平台 (UWP)。

附录
【Arduino 动手做】脉冲序列HAT控制并联Scara机械臂
项目链接:https://www.hackster.io/cnc-design/pulse-train-hat-controlling-parallel-scara-robot-arm-2d4197
项目作者:CNC 设计团队:肖恩
项目视频 :https://www.youtube.com/watch?v=hIZdNmNpX8U&t=1s
项目代码:https://github.com/PulseTrainHat/PulseTrainHatParallelScaraExample


 他的勋章
他的勋章


评论