 返回首页
返回首页
 回到顶部
回到顶部
在这个智能化与创新交融的时代,科技正在以前未所有的方式改变着我们的生活方式。本项目以“智能机械爪小车”为主题,结合现代电子技术与机械设计,致力于打造一款兼具趣味性与实用性的智能设备。通过行空板K10作为主控核心,通过物联网siot遥控,实现了对小车和机械爪的控制。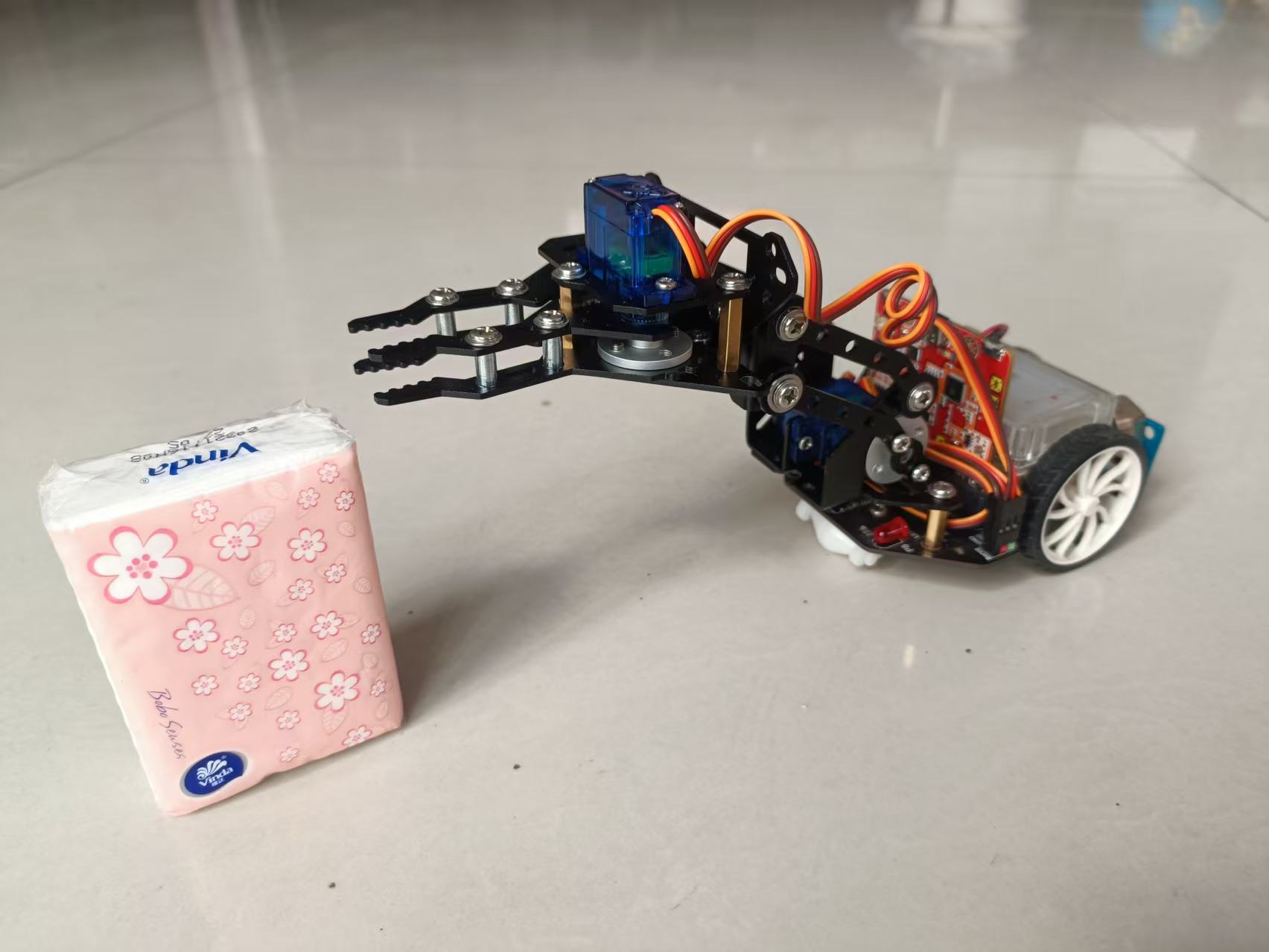
项目的核心在于“双模式控制”——摇杆与语音的协同工作。摇杆控制小车的前后、左转、右转,为用户提供直观的移动操作;而语音控制则赋予机械爪更多的智能化特性,用户可以通过简单的语音指令完成抓取动作。机械爪采用双自由度设计,一个舵机负责升降,另一个舵机负责抓取,能够灵活应对多种场景下的抓取需求。这种设计不仅提升了操作的便捷性,也让小车具备更强的适应能力。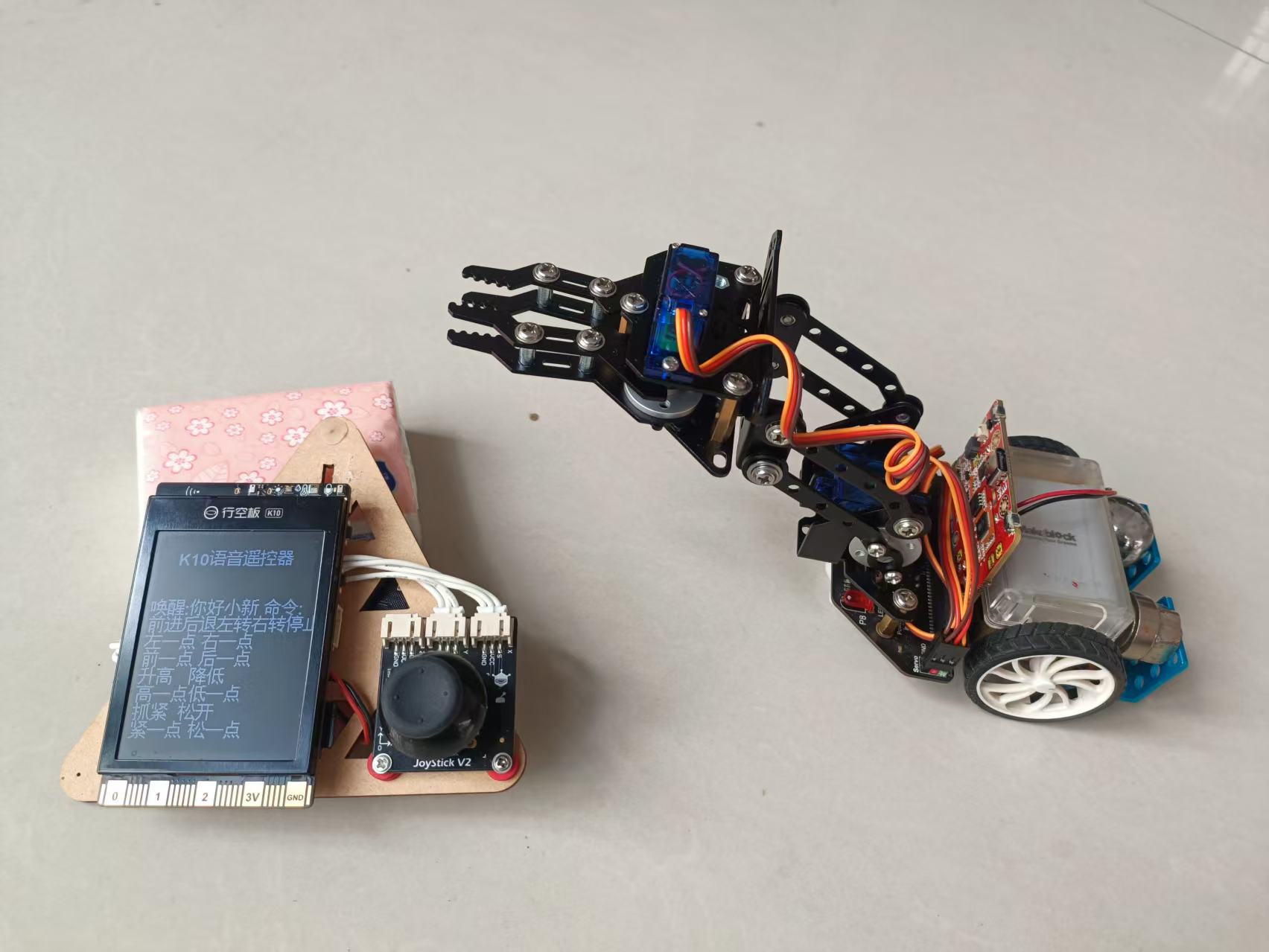
通过这个项目,我们不仅探索了人机交互的新方式,也展现了科技创新的魅力。它不仅仅是一台小车,更是科技与创意碰撞的结晶,是对未来智能生活的美好诠释。
(以上文案由DeepSeek生成,有修改。)
材料清单
- K10 X1
- 摇杆模块 X1
- 麦昆 X1
- 掌控板 X1
- 机械臂 X1
- 电池模块 X1
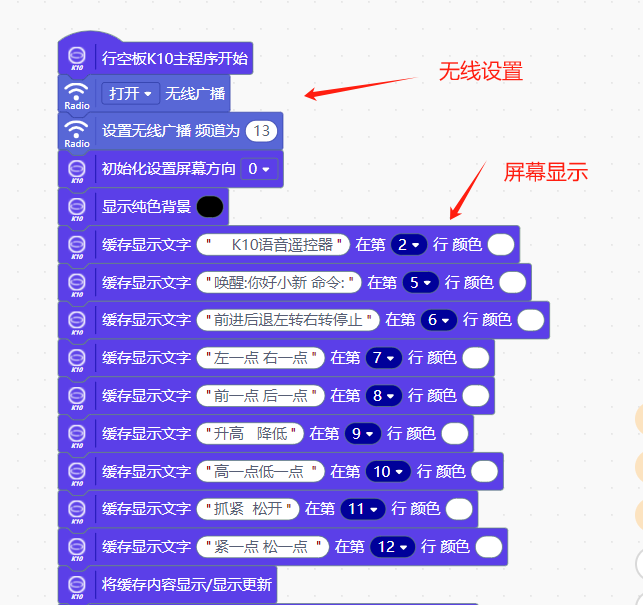
K10遥控器
由K10+摇杆+电池组成,摇杆的X轴、Y轴分别接入K10的P0、P0。


程序如下:

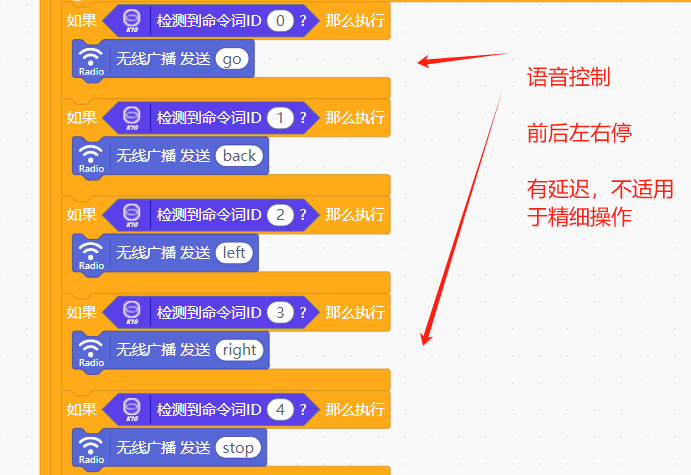
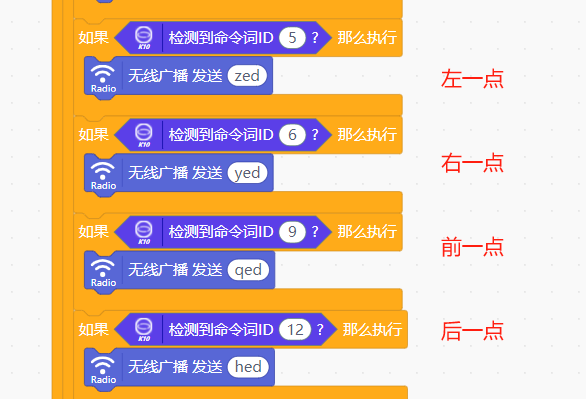
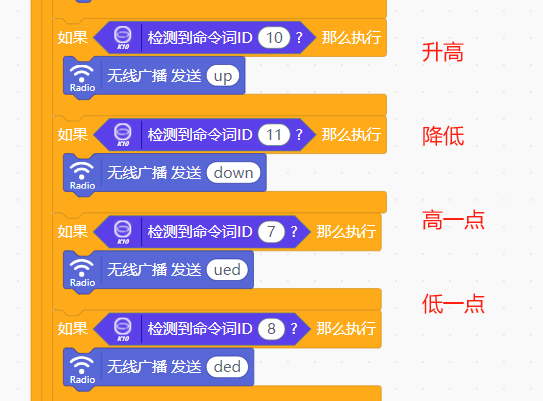
语音命令可以进行全部操作,但实操中主要用于微调的动作。
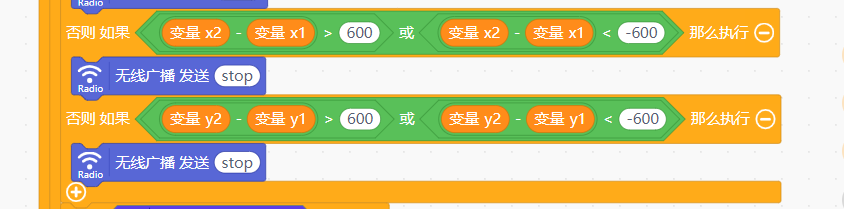
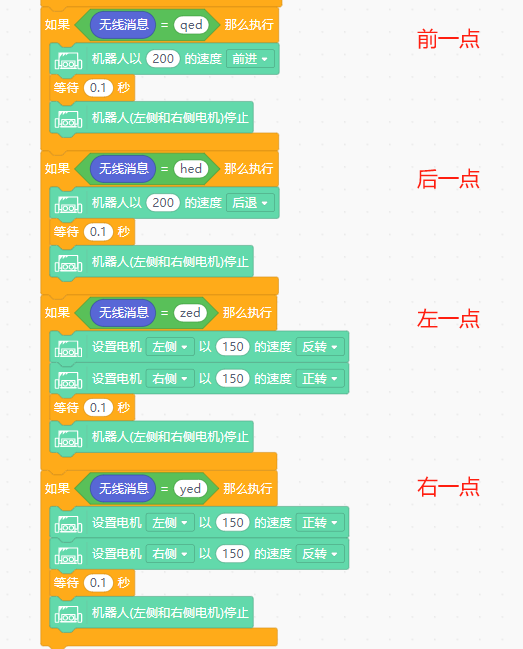
摇杆主要控制小车的运动。下面是摇杆部分。

停止部分,用探测摇杆的回中动作来认定。
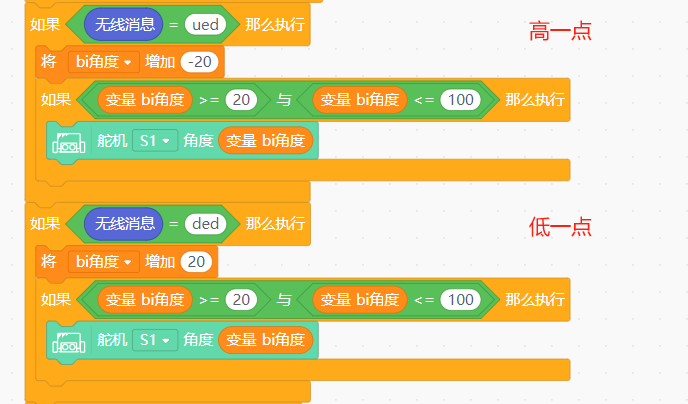
下面是语音部分:

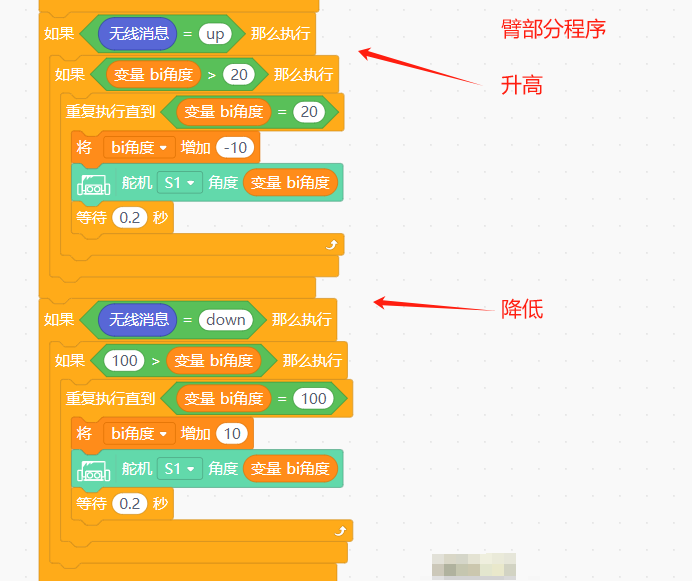
麦昆机械部分:
机械臂舵机 S1
机械爪舵机 S2



小结:
1、麦昆可升降机械爪小车以行空板K10和siot为核心,构建了一个有趣的控制系统。
2、机械臂太重了,为了平衡,车后面加了配重。
附件


 他的勋章
他的勋章

评论