 返回首页
返回首页
 回到顶部
回到顶部

前几天玩遥控小车,觉得缺个机械臂。从网上购买了一个便宜的机械臂。机械臂到货后翻出创客专业版里的舵机,立刻安装。舵机翻弄了半天,螺丝孔的位置对不上。又得从网上找能匹配的舵机,搜索了半天找到了机械臂适应的舵机,果断下单了两个。
一、机械臂安装和调试
昨天舵机到货了,比对了一下舵机螺丝孔和机械臂完全吻合,心情大好。机械臂的安装和调试出现了三个大问题。
问题1:摇臂和机械臂的螺丝孔有错位,转动过程中机械臂的螺母挡摇臂的转动。
螺丝孔的错位,我刚开始是强制把螺丝拧了进去,勉强解决了。摇臂转动时有磕碰的声音,仔细观察是螺母挡摇臂的转动。我的解决方法是一字摇臂换成圆型的摇臂,转动过程再也没有磕碰的声音。

问题2:舵机转动方向和机械臂张开方向不同
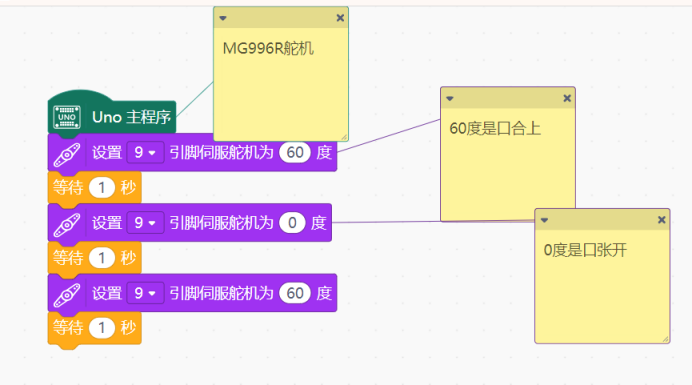
安装上立刻编写简单的调试程序,我们习惯上舵机初始是0度,转到90度开门之类的。机械臂却不同,初始设置成0度,舵机一直响,是内部齿轮卡主转不动磨齿的声音!!!而且机械臂张开的方向和舵机转动90的方向相反。舵机是没有办法设置负方向,我想了个办法,舵机张开设置为0度,舵机初始角度从30度开始一次加15度调试。最终确定初始60度最佳。调试舵机我用Arduino UNO主控板,不设循环执行,用手指按rest键来控制。在不清楚初始角度和张开角度的情况下,设循环很容易损害舵机。舵机齿轮咔咔响就是证明,我买了两个舵机一个就卡坏了。卡坏的舵机维修其实很简单,拆卡舵机重新安装齿轮就好了。主齿轮是钢制的,其他齿轮是塑料的,目测塑料齿没有缺损。
问题3:机械臂安装到小车上卡舵机齿轮
机械臂用Arduino UNO主控板调试没有问题,安装在小车上重新编写程序,还是60度——0度。初始60度却出现了问题,又是卡齿轮的摩擦声!!头都大了,拆下没有舵机的那个钳子,再调试还是有卡齿的声音。只能把舵机拆了找问题,仔细观察发现是摇臂转回60度时卡住。重新安装摇臂,问题立刻明显了,是摇臂的螺丝孔和机械臂的螺丝孔部完全匹配造成的。解决这小问题还不简单?舵机60度时,摇臂找个没有螺丝孔的位置对准机械臂螺丝孔重新打眼就是了!我手头有手工钻,五分钟搞定!全部安装好调试运行,再也没有卡齿轮的声音了,开合非常丝滑!



二、程序的编写
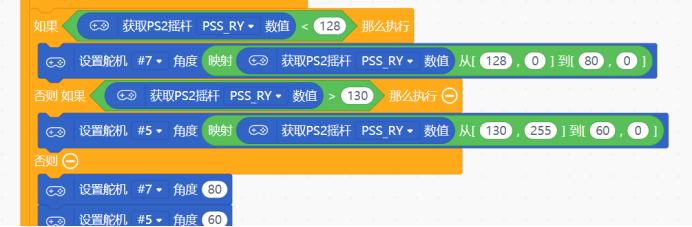
程序编写部分,我将遥控手柄PSB_R3摇杆Y轴方向的两功能放在一个程序块里,向上推控制云台顶端的摄像头,向下推控制机械臂的开合。

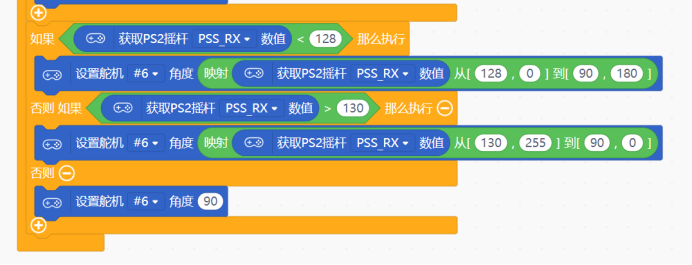
向X轴方向左推,云台向左转,右推云台右转。
全部程序代码
舵机转动时去到了原先的等待0.1秒,云台和机械臂反应非常灵敏。
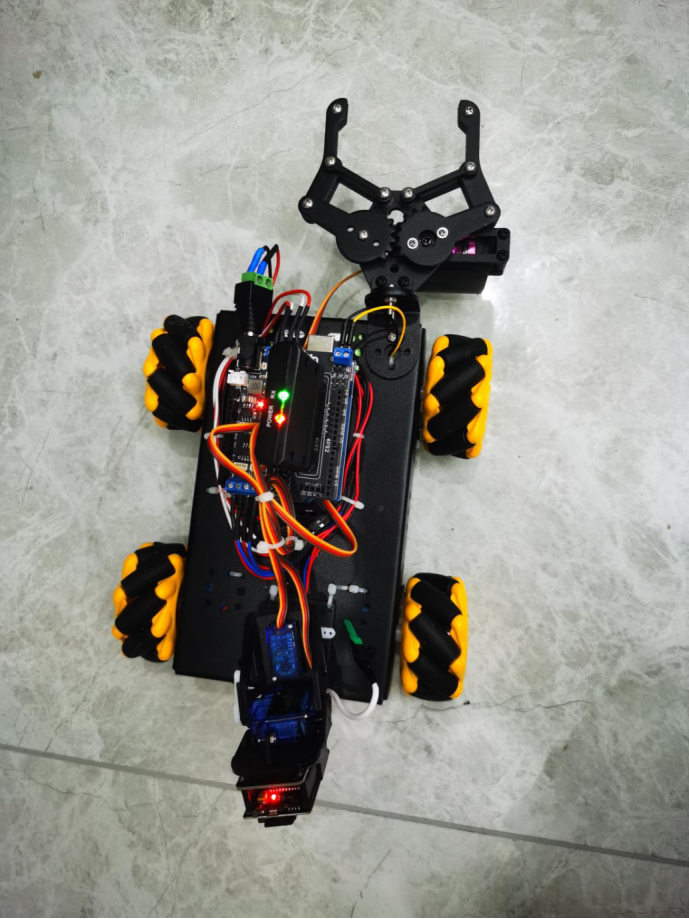
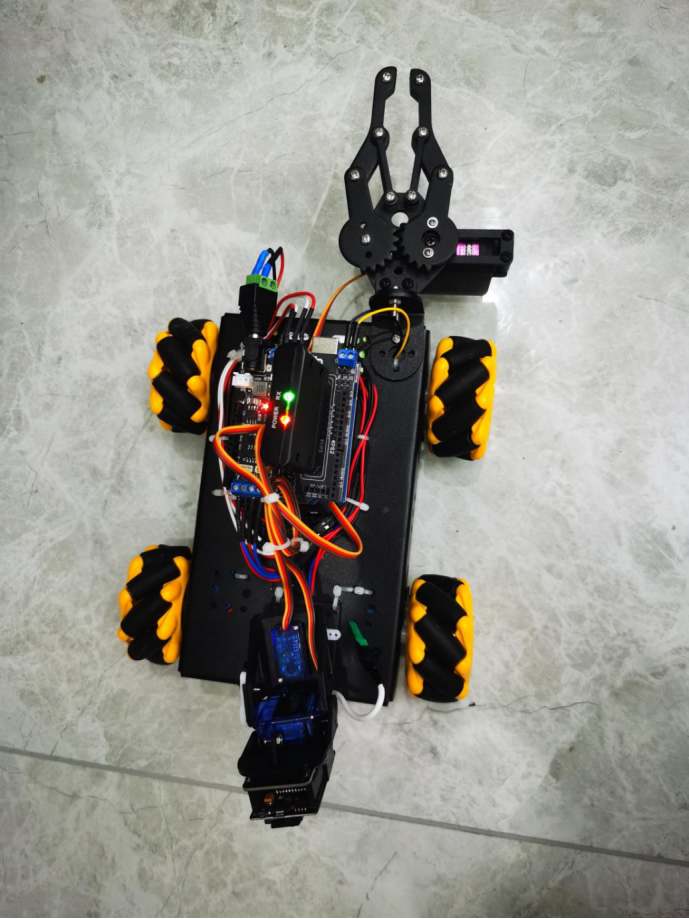
我的遥控小车终于完整了!
在玩小车时机械臂仍旧会出现卡齿轮的声音,这是因为舵机张角太大了,合上时需要很大扭矩力量不足以转动另一个钳子。两个钳子靠齿的咬合张开和闭合,这个实在没办法解决。出现卡齿的声音用手把钳子合起来就没有这个声音了,每次推摇杆不要推到底。
附件


 他的勋章
他的勋章



_深蓝_2024.08.14
老师的机械臂哪儿买的,有跟df配套的吗,推荐一下