 返回首页
返回首页
 回到顶部
回到顶部
一、认识“C4002 毫米波运动与静态存在检测模块人体存在传感器”
C4002是一款基于24GHz FMCW技术的毫米波雷达模块,专为智能家居场景中需要精准静态人体存在感知的应用而设计。模块突破了传统PIR传感器只能检测大幅运动的局限,可在10x10m的有效检测范围内,同步侦测运动人体与静止(微动)人体,并支持运动速度检测、运动方向识别(靠近/远离)及环境光检测功能。模块具备探测范围可调功能,通过低噪采集智能过滤环境干扰,输出模式灵活可配置,是智能家居产品方案实现真无人感控系统的理想核心部件。
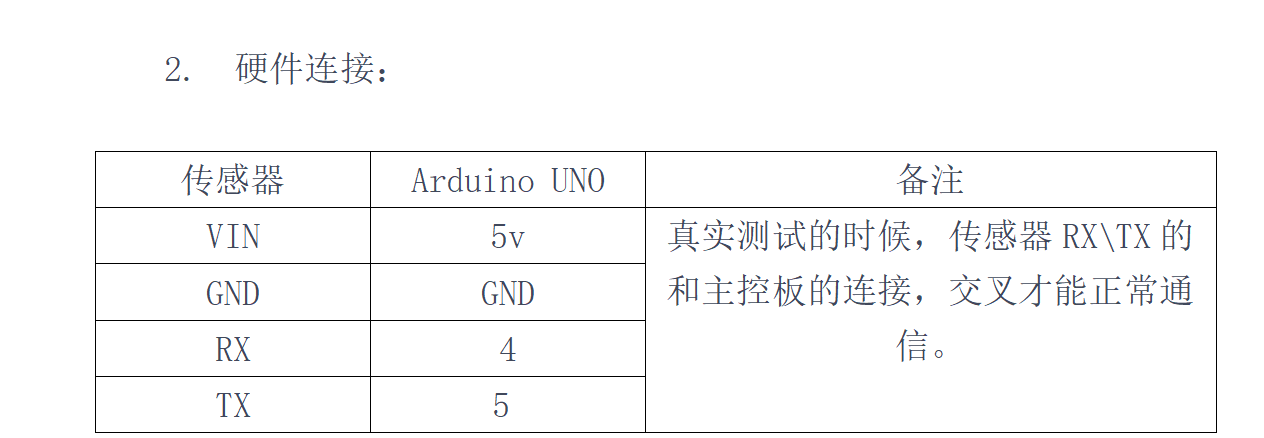
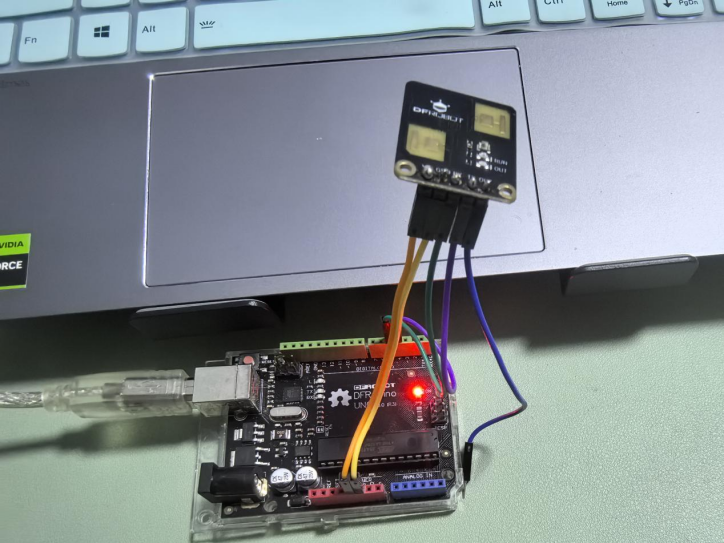
二、硬件连接:
1. 基本接口:

用电烙铁把排针焊接到传感器上,以便于和主控板连接。
二、编程测试
1. 下载安装Arduino IDE 最新版
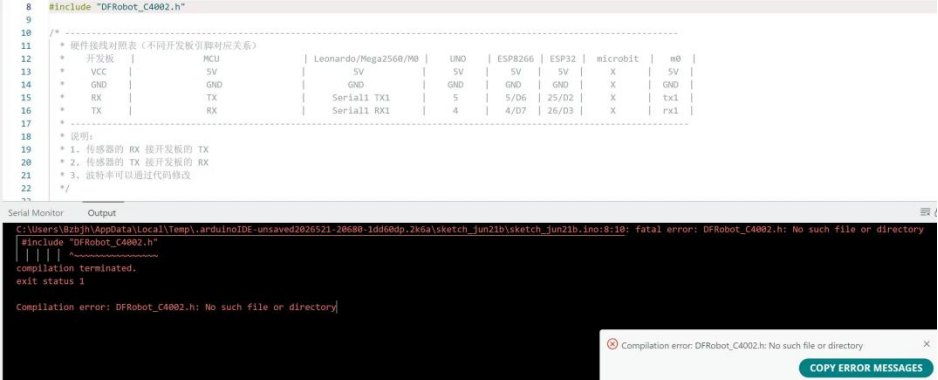
2. 打开Arduino IDE,在状态栏中的Tools--->Manager Libraries 搜索"DFRobot_C4002"并安装本库.否则运行时会出错。
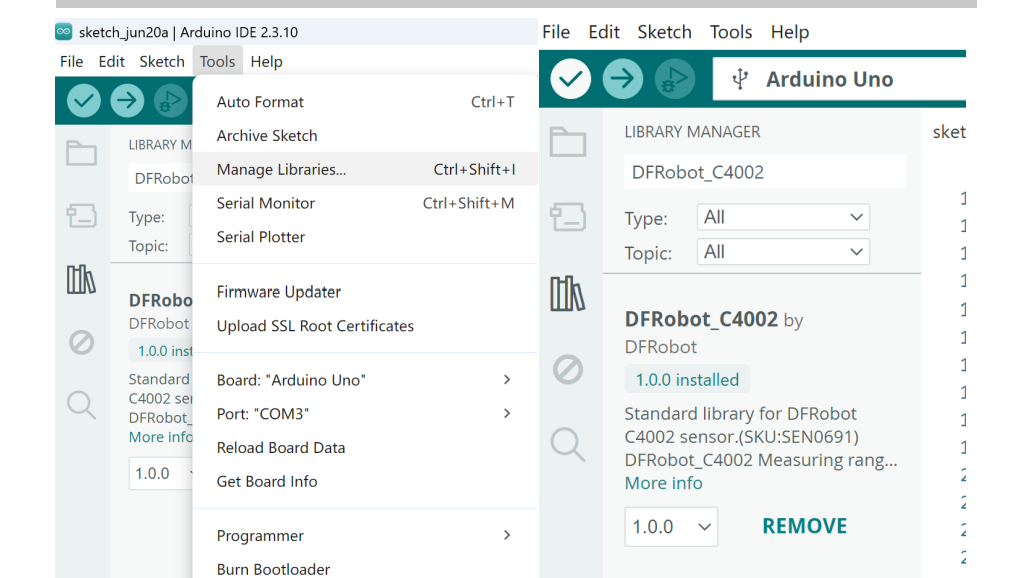
3.设置一下Arduino IDE 主控板:UNO 端口:com3 (不同电脑数值不同)
4.创建新的程序文件,删掉所有的代码,然后复制并官方提供的代码。
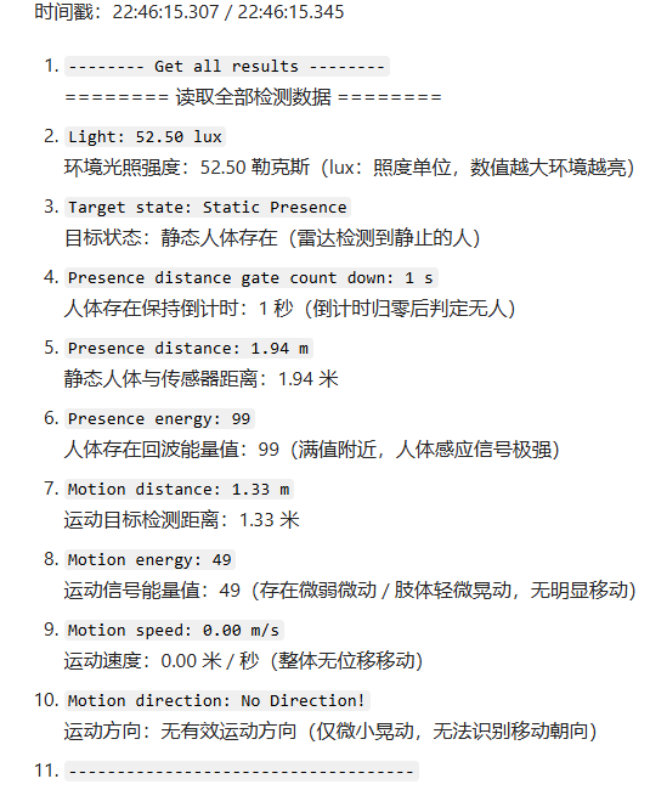
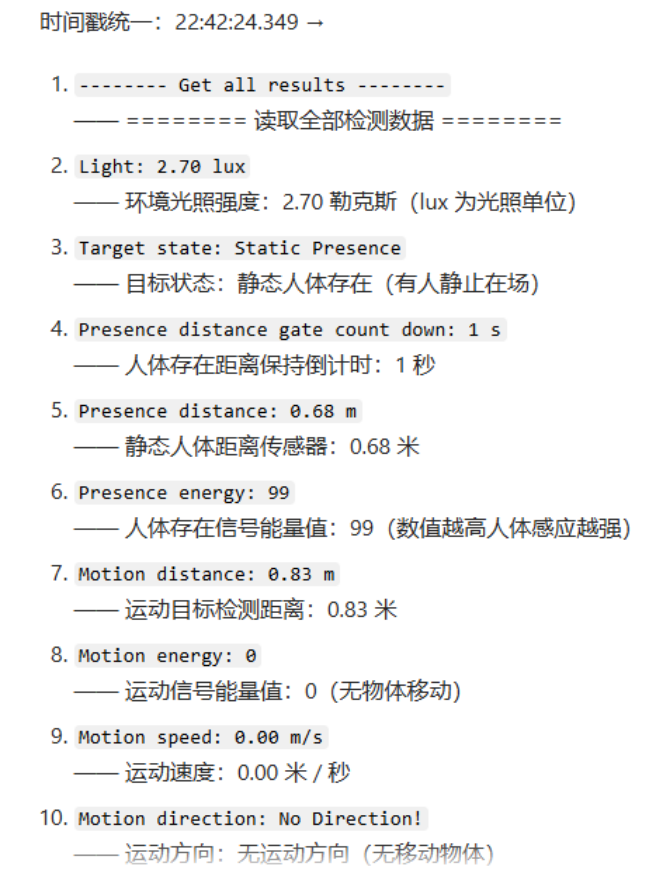
测试结果如下:
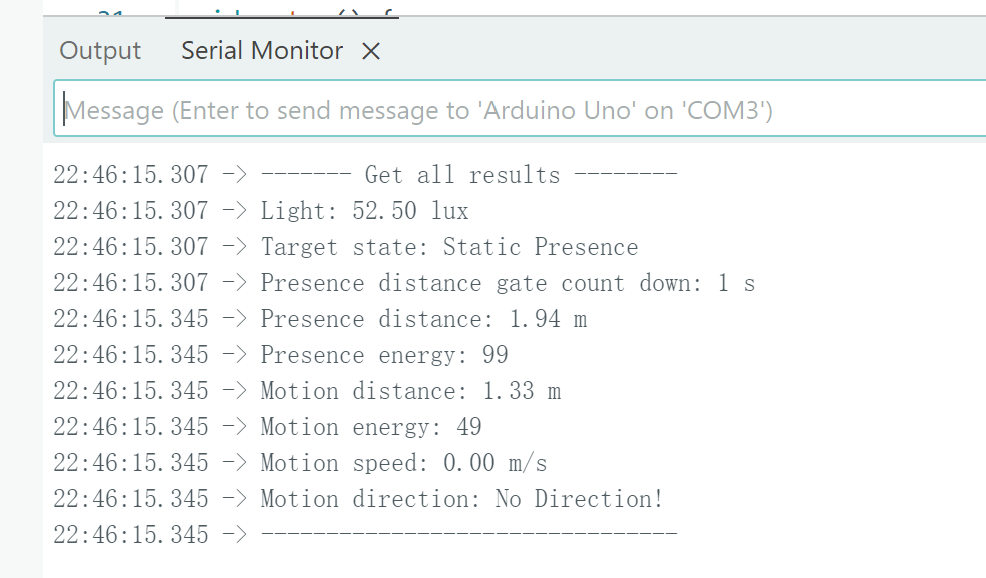
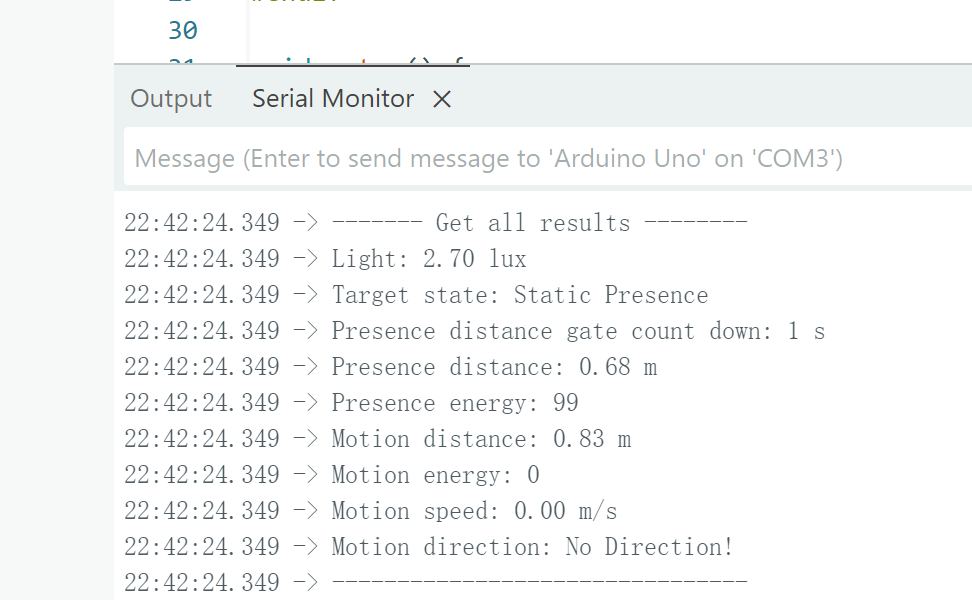
注意:观察当前环境有人、静止、或走动、有什么动作时,数据都会有所变化,且比较灵敏。
二、试用反思:
1.建议试用最新版的Arduino IDE。
2.前提下载安装DFRobot_C4002库,否则会出现如下错误提示:
1. 产品维护库中的硬件连接:
传感器的RX\TX,连接在Arduino UNO主控板的(0-RX,1-TX),实际连接(5-RX,4-TX)
新手上路,请大家多多关照。后续有时间继续研究,和学生们一起创造。


 他的勋章
他的勋章

评论