 返回首页
返回首页
 回到顶部
回到顶部

【LattePanda Mu 开发套件】步进电机驱动板 PCB 设计
本文介绍了 LattePanda Mu 开发套件步进电机扩展板 PCB 设计,包括参数特点、效果展示、原理图、实物验证、工程测试等。
PCB 工程详见:LattePanda Mu 步进电机驱动板 - 立创开源硬件平台 .
项目介绍
LattePanda Mu 开发板为主控,运行 LabVIEW 上位机实现步进电机驱动控制及数据采集。
参数特点
RP2350 高性能 MCU 主控,为步进电机提供精准控制;
五线步进电机接口,便于快速模块化连接;
步进电机运行指示 LED,显示实时驱动顺序和状态;
ULN2003 达林顿放大驱动芯片,支持 5V-12V 宽输入电压;
多排电源支持,便于扩展和集成更多外设资源;
4 线 OLED 和 7 线 TFT 接口,支持单色和彩色屏显示系统运行的实时状态;
UART、ADC、IIC、SPI 接口,丰富的接口为外设连接提供支持;
DHT11 传感器接口,监控环境温湿度信息,以便调整相关参数;
支持 直插 和 贴片 两种安装方式,适应不同测试需求;
支持 Battery 接口,便于外接锂电池使用,为便携和低功耗设备提供了有利支持;
OLED、TFT、DHT11 的 VCC 供电处增加 100nF 滤波电容,提升抗干扰能力;
支持 3D 外壳,确保 PCB 金属引脚电气隔离和美观;
大供电过孔,内径20mil,外径40mil,确保供电线宽,减少发热,保障电路安全;
……
原理图
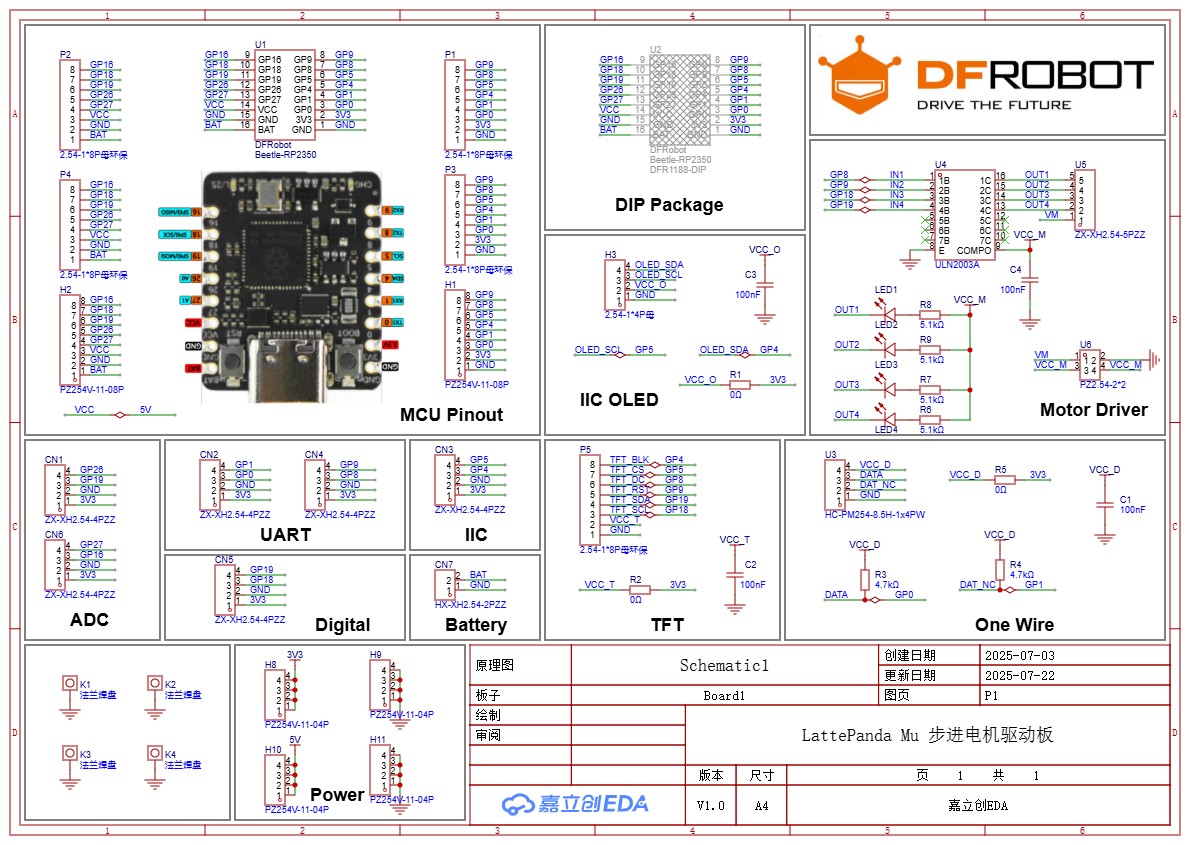
原理图主要包括如下模块
GPIO 排针;
步进电机驱动:快接插头、ULN2003 芯片、状态指示灯等;
通信接口:包括 UART、IIC、SPI、ADC 等;
显示屏:包括四线 OLED、TFT 彩屏;
传感器:支持 DHT11 模块;
电源供电:支持 3V3、5V 以及 3.7V 锂电池供电。
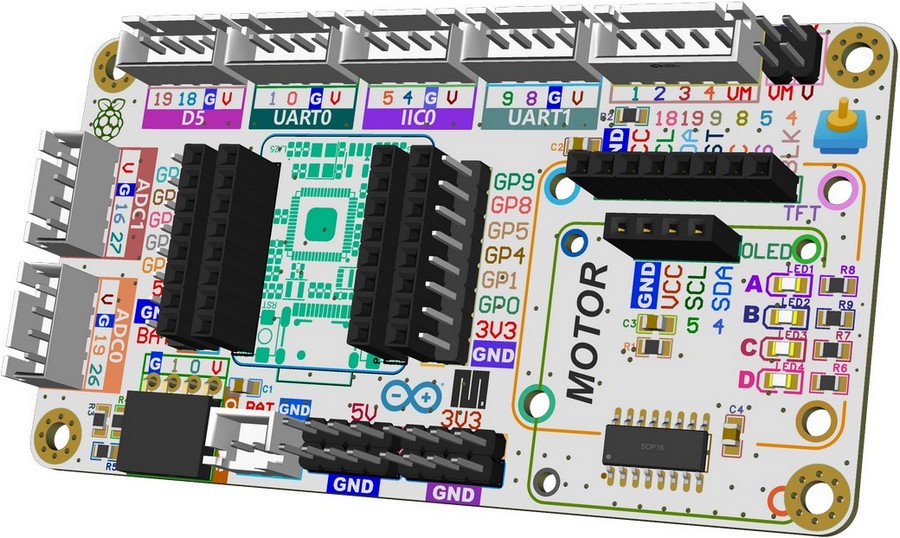
PCB
Top view
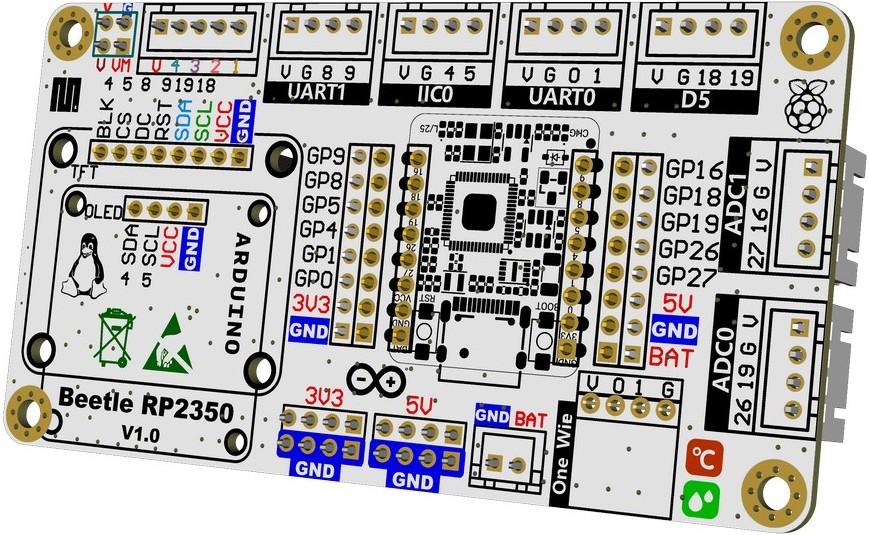
Bottom view
外壳

引脚及接口精准开孔;
步进电机驱动芯片侧边打孔设计,便于散热;
步进电机运行指示 LED 侧边开槽设计,便于观察指示灯状态;
功能分布
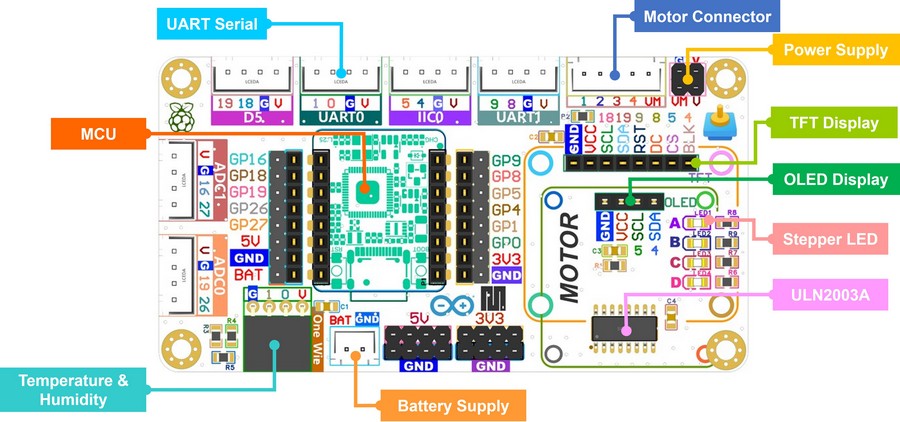
参数特点
RP2350 高性能 MCU 主控,为步进电机提供精准控制;
五线步进电机接口,便于快速模块化连接;
步进电机运行指示 LED,显示实时驱动顺序和状态;
ULN2003 达林顿放大驱动芯片,支持 5V-12V 宽输入电压;
多排电源支持,便于扩展和集成更多外设资源;
4 线 OLED 和 7 线 TFT 接口,支持单色和彩色屏显示系统运行的实时状态;
UART、ADC、IIC、SPI 接口,丰富的接口为外设连接提供支持;
DHT11 传感器接口,监控环境温湿度信息,以便调整相关参数;
支持 直插 和 贴片 两种安装方式,适应不同测试需求;
支持 Battery 接口,便于外接锂电池使用,为便携和低功耗设备提供了有利支持;
OLED、TFT、DHT11 的 VCC 供电处增加 100nF 滤波电容,提升抗干扰能力;
支持 3D 外壳,确保 PCB 金属引脚电气隔离和美观;
大供电过孔,内径20mil,外径40mil,确保供电线宽,减少发热,保障电路安全;
……
实物展示
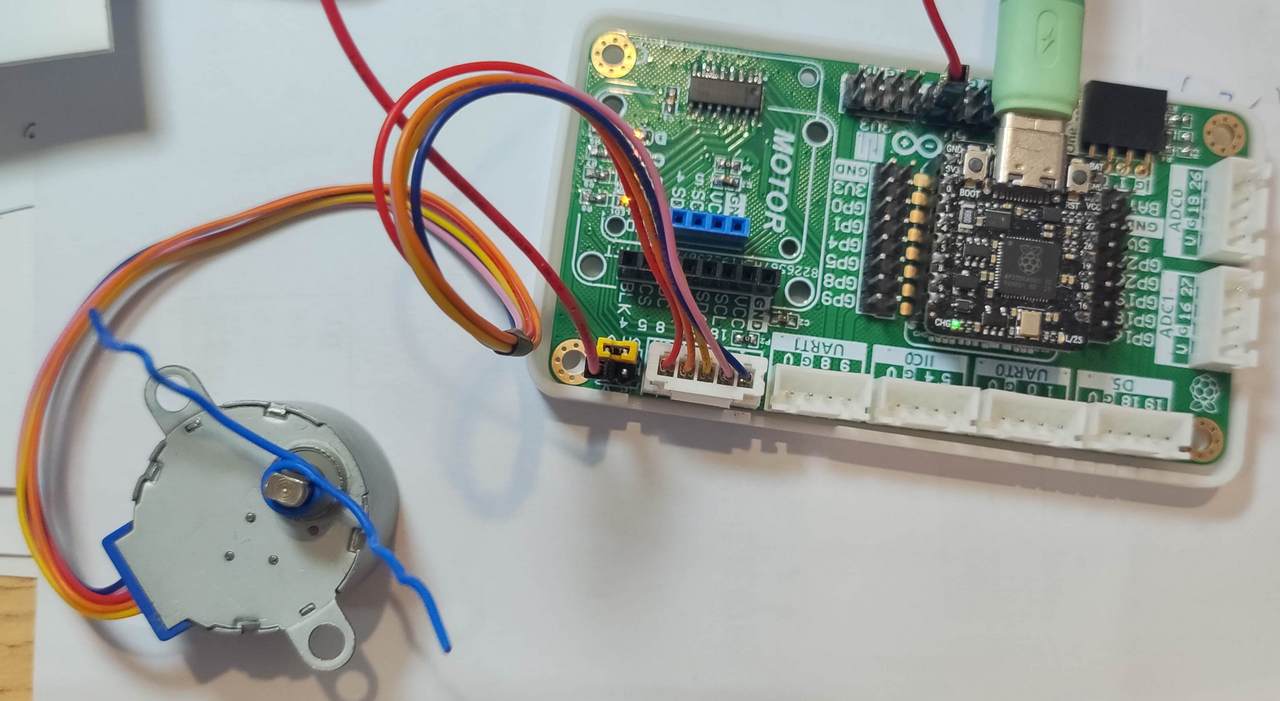
五线 28BYJ-48 步进电机接入板载 XH2.54 快插底座;
供电可使用板载 5V 引脚,或外接共地 12-24V 直流电源供电,注意提供匹配的电压以驱动步进电机。
工程测试
LattePanda Mu 通过 USB 数据线连接开发板,通过 LabVIEW 上位机串口发送旋转角度和速度控制步进电机精确转动。
代码
见底部。
效果
不带外壳
加上外壳
总结
本文介绍了 LattePanda Mu 开发套件步进电机扩展板 PCB 设计,包括原理图、PCB 展示、外壳设计、参数特点、效果展示、实物验证、工程测试等,为 LattePanda Mu 系列产品的开发设计提供了参考。
'''
Name: Stepper Motor rotate custom angle from serial and OLED display
Version: v1.0
Date: 2025.11
Author: ljl
Other: Rotate stepper motor (28byj-48) for custom angle from UART, and OLED display the motor state in moving or steady.
Hardware connect:
8 ---- IN1 (ULN2003)
9 ---- IN2 (ULN2003)
18 ---- IN3 (ULN2003)
19 ---- IN4 (ULN2003)
4 ---- SDA (OLED_SSD1306)
5 ---- SCL (OLED_SSD1306)
'''
from machine import Pin, I2C
import ssd1306 # OLED
import utime
# ==== Initialized IIC OLED ====
i2c = I2C(0, scl=Pin(5), sda=Pin(4))
oled_width = 128
oled_height = 64
oled = ssd1306.SSD1306_I2C(oled_width, oled_height, i2c)
# display the motor state
def display_motor(angle,state):
oled.fill(0) # 清屏
oled.text("Rotate Angle: ", 0, 0)
oled.text("{:.1f} deg".format(angle), 20, 15)
oled.text("State: ", 0, 35)
if state == 1:
oled.text("Rotating ...", 20, 50)
elif state == 0:
oled.text("Reset", 20, 50)
else:
oled.text("Error", 20, 50)
oled.rotate(0) # rotate the screen display for a more comfortable position
oled.show()
# 电机控制引脚
coils = [
Pin(8, Pin.OUT), # A相 (IN1)
Pin(9, Pin.OUT), # B相 (IN2)
Pin(18, Pin.OUT), # C相 (IN3)
Pin(19, Pin.OUT) # D相 (IN4)
]
# 四相八拍步进电机的相序
STEP_SEQ = [
[1, 0, 0, 1], # AB'
[1, 0, 0, 0], # A
[1, 1, 0, 0], # AB
[0, 1, 0, 0], # B
[0, 1, 1, 0], # BC
[0, 0, 1, 0], # C
[0, 0, 1, 1], # CD
[0, 0, 0, 1] # D
]
# 驱动电机旋转指定步数;delay_ms 步间延时(ms),控制转速
def step_motor(steps, delay_ms=1):
direction = 1 if steps >=0 else -1
for _ in range(abs(steps)):
for phase in range(8)[::direction]: # 方向控制
for coil, state in zip(coils, STEP_SEQ[phase]):
coil.value(state)
utime.sleep_ms(delay_ms)
# 角度控制
def rotate_angle(angle):
steps_per_rev = 509 # 64步/拍 × 8拍 × 8相位
steps = int(angle * (steps_per_rev / 360))
display_motor(angle,1)
step_motor(steps)
# 释放电机扭矩
def release():
for coil in coils:
coil.value(0)
display_motor(0,0)
# main loop
display_motor(0,0) # initialize OLED display
while True:
#rotate_angle(1) # 以单步方式持续转动
rotate_angle(180) # 逆时针
release()
utime.sleep_ms(2000)
rotate_angle(-90) # 顺时针
release()
utime.sleep_ms(2000)


 他的勋章
他的勋章

罗罗罗2025.11.20
666