 返回首页
返回首页
 回到顶部
回到顶部

9.22
【目标预设】
在这个作业中我将尝试用二哈识图2+K10麦轮小车实现物体追踪功能。
比如一个球球,放在加装二哈识图2的K10麦轮小车前,二哈2启用物体追踪,移动球球,小车实现追踪功能,随着球球前进、后退、左移、右移等。
+

=
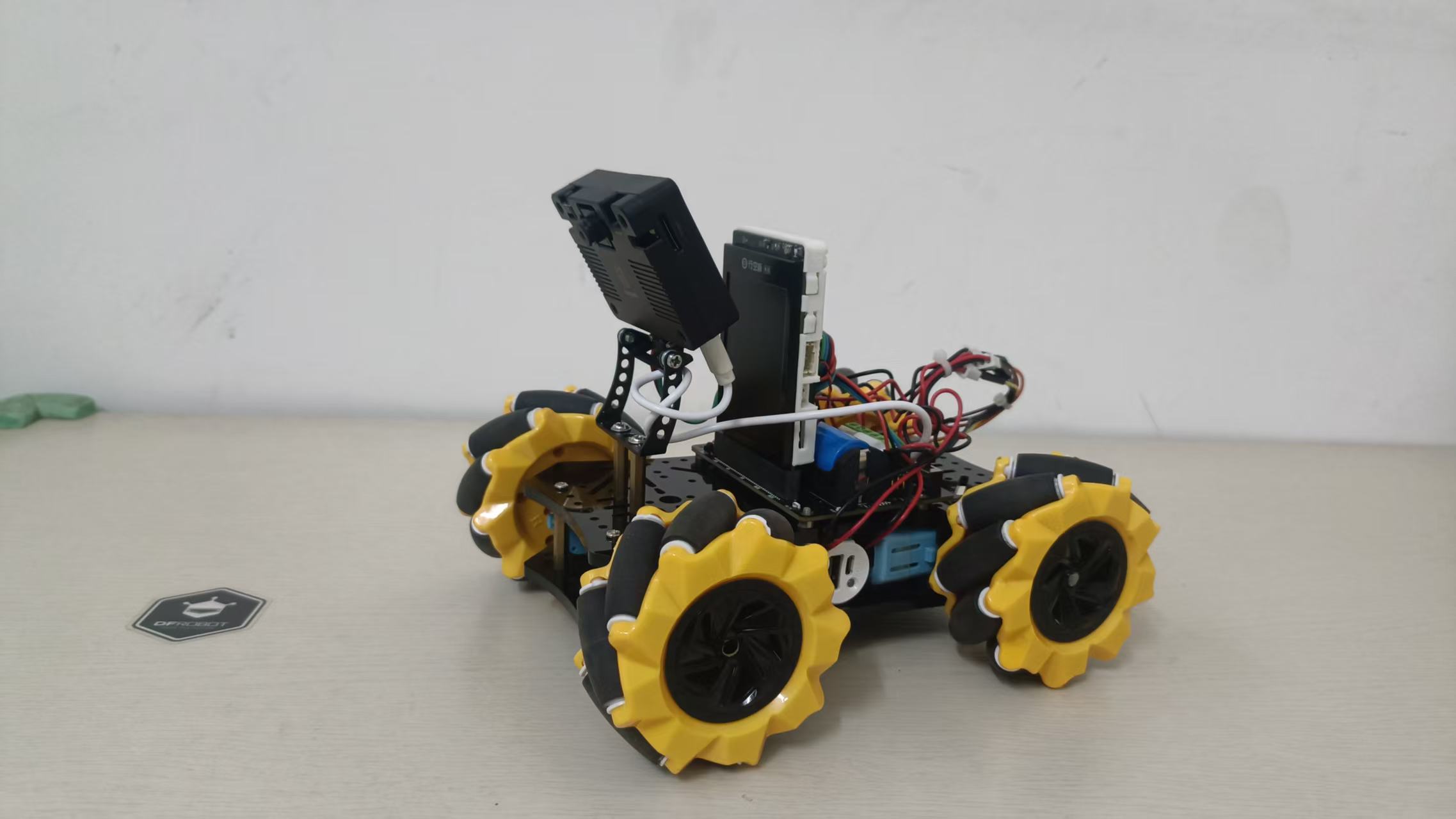
硬件准备完毕,下面尝试注入灵魂。

材料清单
- 二哈识图2 X1
- 行空板K10 X1
- K10扩展板 X1
- TT电机 X4
- 麦轮+底盘 X1套
步骤1 硬件组装
关于麦轮小车的组装和麦轮小车的运动方式,都记录在:
小智MCP自然语言控制 K10 行空板麦轮小车- Makelog(造物记)
1、安装平台时注意麦轮上的小轮方向呈对角线一致,简记“X”型;
2、本项目中电机扩展板接线顺序M1、M2、M3、M4依次为车架左上、 左下、右上、右下的麦轮。
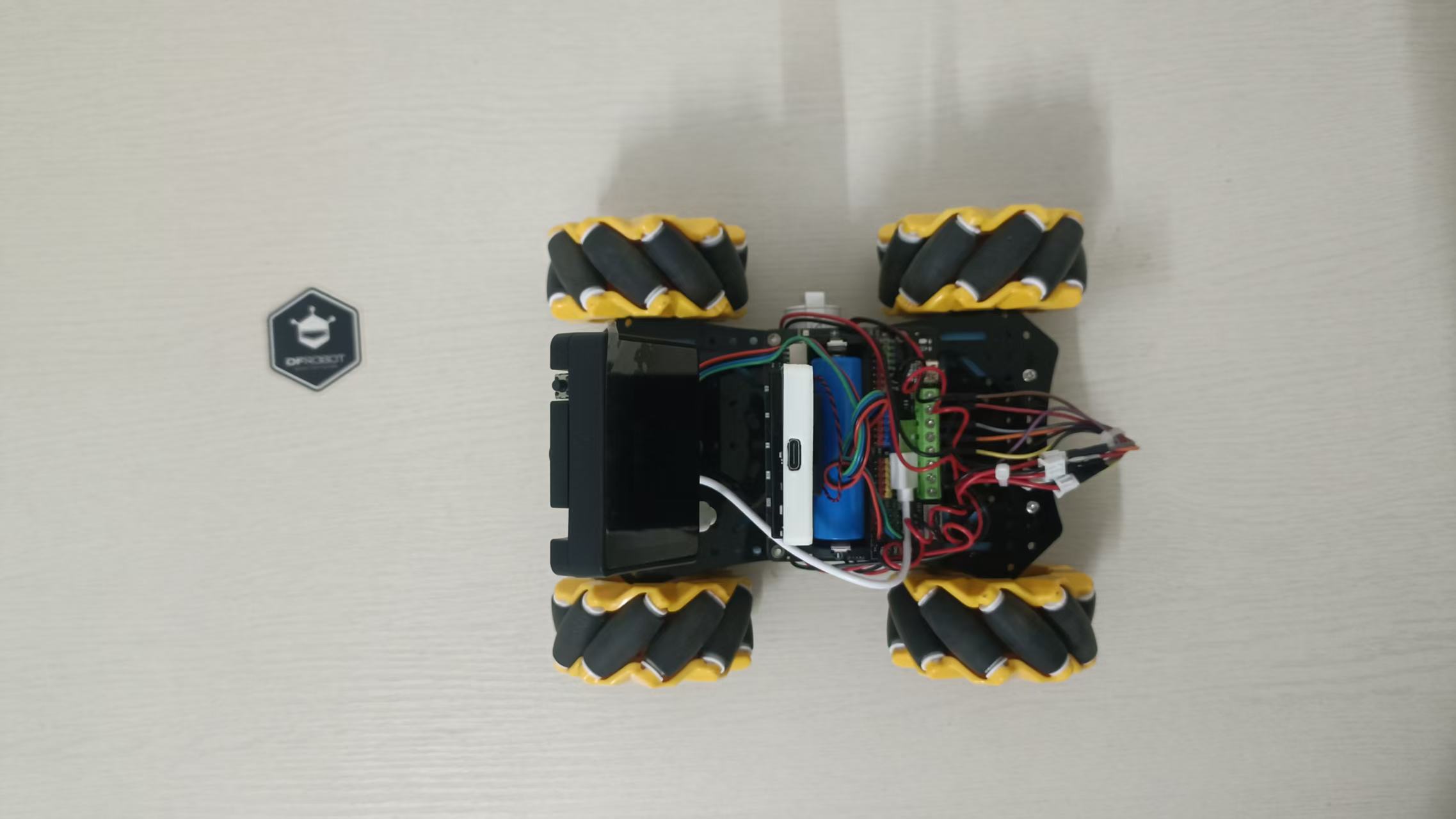
3、在这个作业中,增加了二哈识图2,接在扩展板的I2C 5V接口,为了节约扩展板电池电力,哈2用一个小充电宝单独供电。
4、本项目中,只编写麦轮小车的六种基本运动模式。
步骤2 收集二哈识图2物体追踪数据,为编写运动控制做准备
软件:mind+1.8.1
主控:行空板K10
扩展:
写读取二哈物体追踪数据并分析。
二哈识图2wiki:二哈识图 2 使用教程 HUSKYLENS 2 WIKI
关于哈2物体追踪的相关资料(摘自wiki):


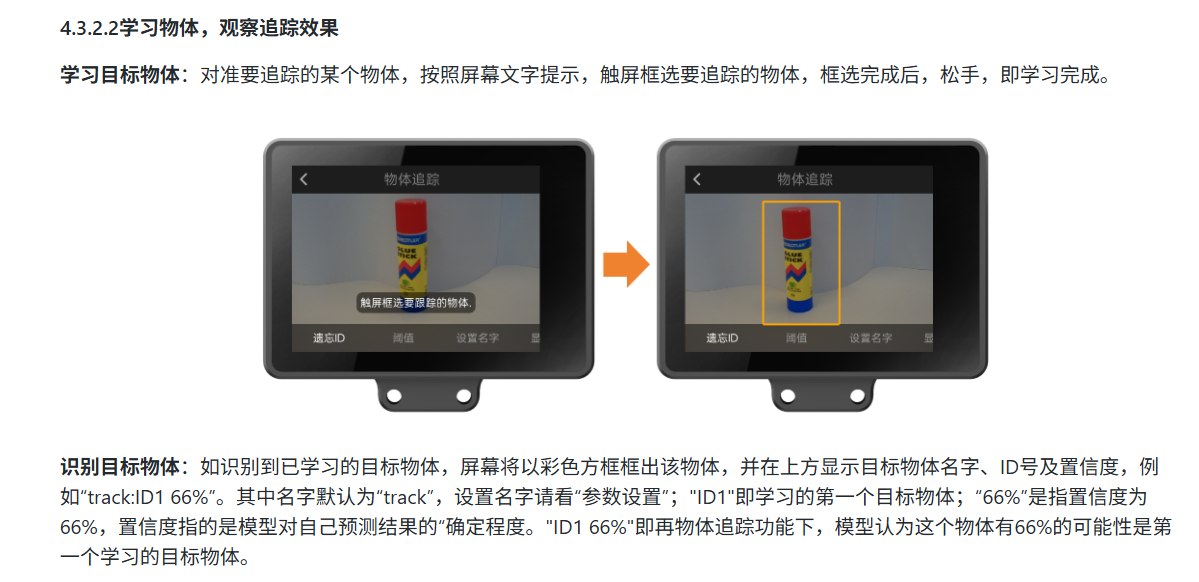
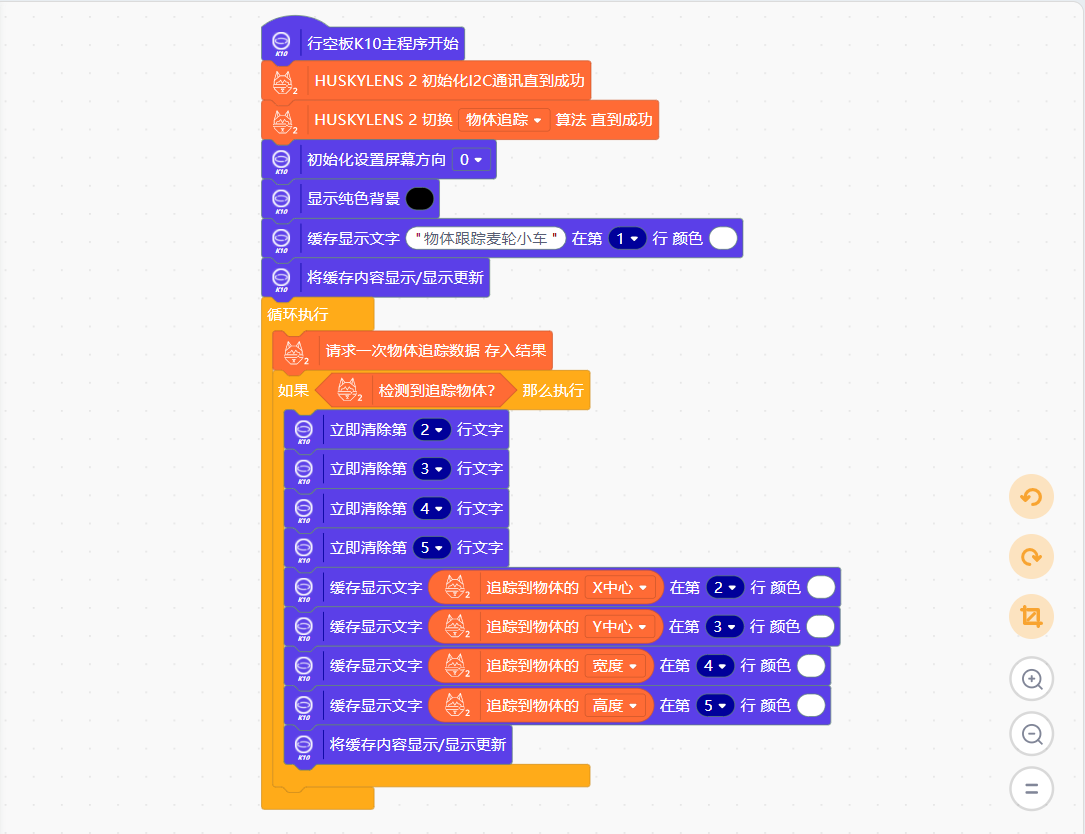
上传数据读取程序,移动物体根据数据制定物体追踪逻辑:
1.获取摄像头中追踪物体的框所在的中心位置坐标(x,y)和尺寸数据(高度、宽度)。
2.根据识别框的X坐标初步判断物体相对于摄像头的左右位置,如果偏左(x坐标数值小)就控制小车左移,如果偏右(x坐标数值大)就控制小车右移。
3.根据识别框的高度(或宽度)初步判断物体相对于摄像头的距离,如果宽度较大,表示物体离小车较近,则驱动小车后退。如果宽度较小,表示物体离小车较远,则驱动小车前进。
4.具体阈值数据与追踪物体大小,二哈2俯视角度,小车移动速度等有关,需根据实际测试情况调整。
5.建议用较大且与背景色彩反差大的物体测试,便于哈识别追踪,比如玩具小球、网球、气球、彩色方块等等,你可以用不同的物体测试,然后找一个便于演示的、追踪动作流畅的物体用于展示。

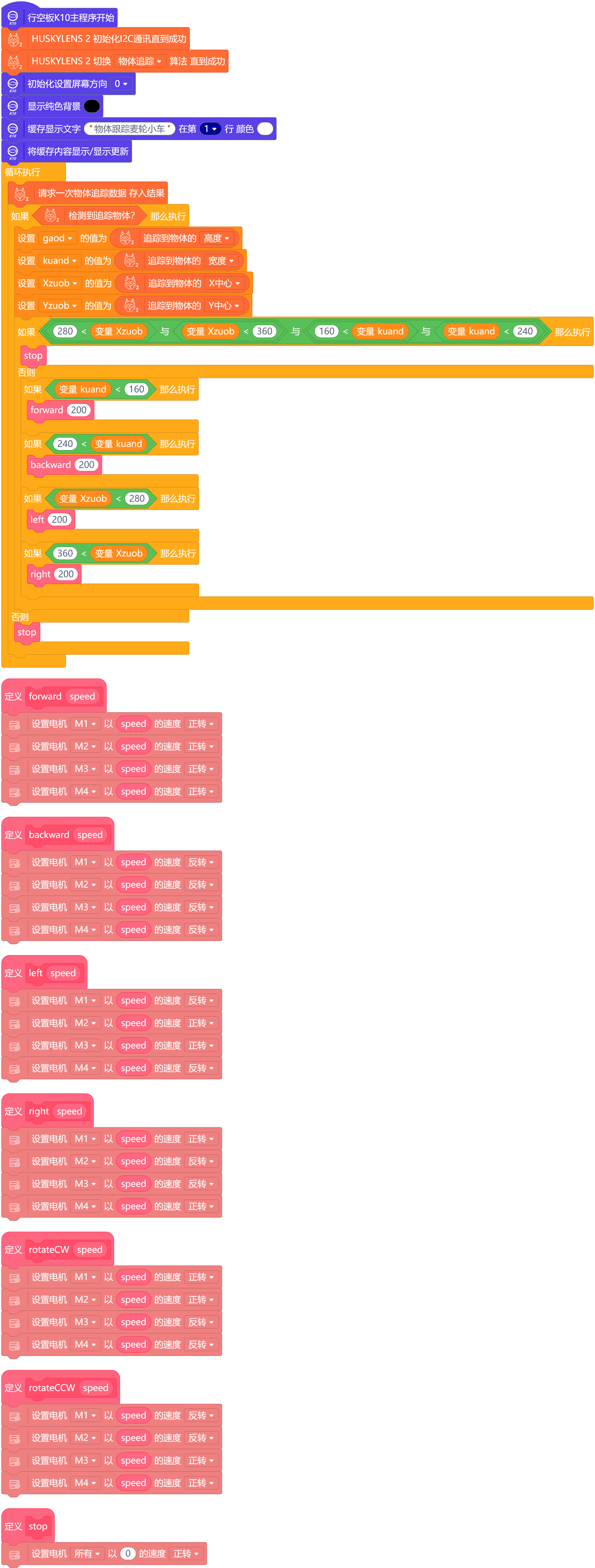
步骤3 程序编写与调试
下面是我编写的测试程序,供大家参考:
【项目小结】
1、基本达成目标,用较大的球形物体便于在地面移动,二哈可以较准确识别追踪物体,麦轮小车的动作也比较流畅。
2、后续可以增加目标丢失后的搜寻功能,比如用云台舵机转动(小车停止)在小球丢失方向搜索。
3、二哈的物体追踪识别范围有限,过远过近过左过右都会跑出识别范围,所物体移动速度要适度缓慢,如果增加云台在适当的范围内左右上下跟随会不会增加识别区域呢?这也超出我的能力范围了。


 他的勋章
他的勋章
罗罗罗2025.12.01
666
伍老师2025.10.08
真的厉害!
rzyzzxw2025.10.08
伍老师,这个挺简单的。
easy猿2025.09.23
老师跟进太快了
rzyzzxw2025.09.24
谢谢