 返回首页
返回首页
 回到顶部
回到顶部

7.14
[写在前面]
这个帖子,写的是用K10小智AI通过MCP服务控制接在M10上的灯环改变颜色和亮度的事,顺便控制小风扇的开关。

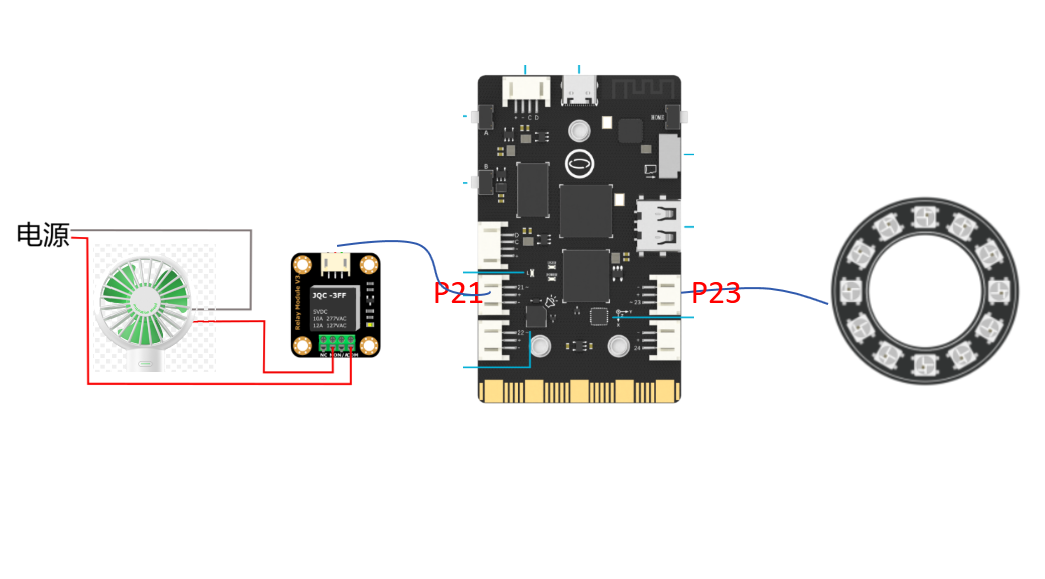
材料清单
- M10 X1
- M10扩展板组合 X1
- K10小智+电池 X1
- RGB灯环 X1
- 数字继电器模块 X1
- 小风扇及电源 X1
步骤1 行空板M10上安装pyenv环境和Python 3.12.7
这一步已在前面项目中按照官方教程完成,记录在:M10仰望小车(MCP)的学习与尝试
https://makelogapi.dfrobot.com.cn/api/project/handleShareUrl?pid=165_317714
步骤2 K10小智聊天机器人配置
K10刷小智固件见官方教程。
行空板小智机器人官方地址为:
https://www.unihiker.com.cn/wiki/k10/xiaozhi_ai
现阶段,提供了四种小智固件。
最新版,除了支持调用摄像头识别物体之外,还支持板载RGB的调用。
配置小智AI
进入小智聊天机器人控制台,配置角色。


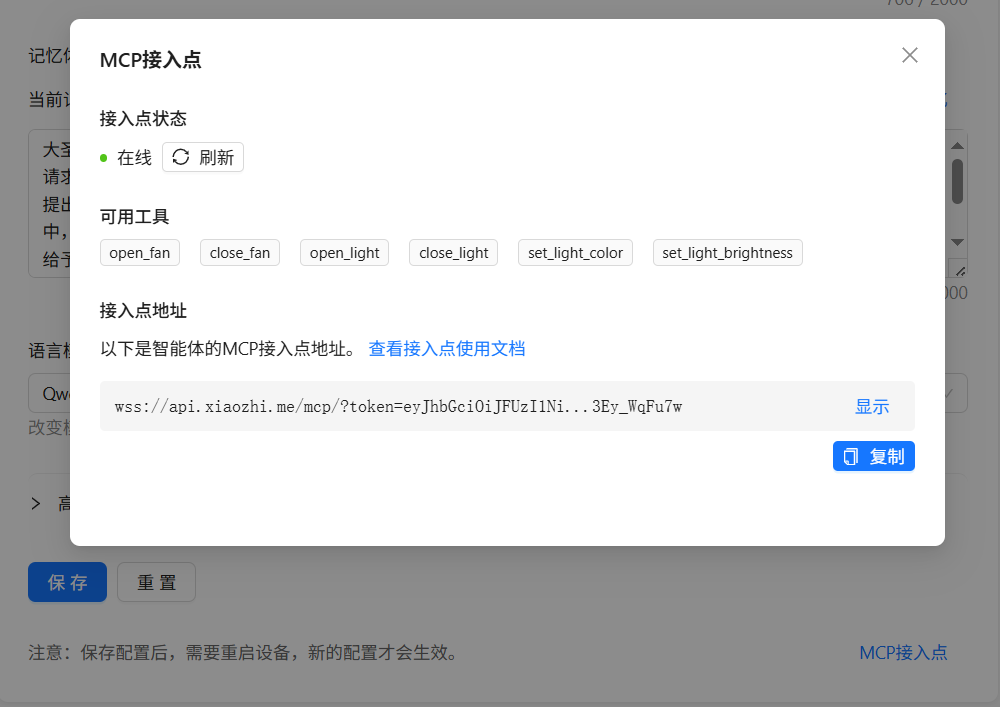
获取MCP接入点,复制智能体接入点地址备用。
步骤3 M10程序编写
1、编写mcp服务文件,move.py。
新建文件move.py,复制云天老师写的代码,修改为智能家的控制内容。
功能描述:控制M10风扇开启、关闭,灯环点亮、熄灭,灯环亮度、颜色调整。

# move.py
from mcp.server.fastmcp import FastMCP
import sys
import logging
#配置日志
logger = logging.getLogger('MoveServer')
# 修复Windows控制台UTF-8编码问题
if sys.platform == 'win32':
sys.stderr.reconfigure(encoding='utf-8')
sys.stdout.reconfigure(encoding='utf-8')
# 创建MCP服务器
mcp = FastMCP("MoveServer")
#======================= 设备控制工具 =======================
#添加一个工具
@mcp.tool()
def open_fan() -> dict:
"""
控制风扇开启。
该函数将设置P21引脚为高电平,控制接在该引脚上的继电器闭合电源开关,使风扇开启。
Returns:
dict: 返回一个字典,包含操作结果。
"""
result = "风扇开启"
logger.info(result)
return {"success": True, "result": result}
#添加一个工具
@mcp.tool()
def close_fan() -> dict:
"""
控制风扇关闭。
该函数将设置P21引脚为低电平,控制接在该引脚上的继电器断开电源开关,使风扇关闭。
Returns:
dict: 返回一个字典,包含操作结果。
"""
result = "风扇关闭"
logger.info(result)
return {"success": True, "result": result}
#添加一个工具
@mcp.tool()
def open_light() -> dict:
"""
控制RGB灯环点亮。
该函数将设置P23引脚RGB灯环点亮,设置为红色,亮度100。
Returns:
dict: 返回一个字典,包含操作结果。
"""
result = "灯环已点亮"
logger.info(result)
return {"success": True, "result": result}
#添加一个工具
@mcp.tool()
def close_light() -> dict:
"""
控RGB灯环熄灭。
该函数将设置P23引脚RGB灯环熄灭。
Returns:
dict: 返回一个字典,包含操作结果。
"""
result = "灯环已熄灭"
logger.info(result)
return {"success": True, "result": result}
# 新增RGB颜色控制工具
@mcp.tool()
def set_light_color(color: str) -> dict:
"""
设置RGB灯环颜色。
该函数将设置P23引脚RGB灯环的颜色。
参数:
color (str): 颜色名称(如红色、绿色、蓝色等)
Returns:
dict: 返回一个字典,包含操作结果。
"""
result = f"设置颜色为{color}"
logger.info(f"设置灯环颜色: {color}")
return {"success": True, "result": result}
# 新增RGB亮度控制工具
@mcp.tool()
def set_light_brightness(brightness: int) -> dict:
"""
设置RGB灯环亮度。
该函数将设置P23引脚RGB灯环的亮度。
参数:
brightness (int): 亮度值(0-255)
Returns:
dict: 返回一个字典,包含操作结果。
"""
result = f"设置亮度为{brightness}"
logger.info(f"设置灯环亮度: {brightness}")
return {"success": True, "result": result}
# 启动服务器
if __name__ == "__main__":
mcp.run(transport="stdio")修改小智AI管道文件mcp_pipe.py。
新建文件mcp_pipe.py,复制云天老师代码,并做控制动作方面的修改,填入自己的MCP接入点地址。
功能描述:连接到 MCP 服务器,并通过 WebSocket 端点将输入和输出与指定的 Python 脚本进行管道通信。
加入了开机画面。

# mcp_pipe.py
"""
This script is used to connect to the MCP server and pipe the input and output to the websocket endpoint.
Version: 0.1.0
Usage:
export MCP_ENDPOINT=
python mcp_pipe.py
"""
# -*- coding: UTF-8 -*-
# MindPlus
# Python
from unihiker import GUI
import asyncio
import websockets
import subprocess
import logging
import os
import signal
import sys
import random
from dotenv import load_dotenv
from pinpong.board import Pin
from pinpong.board import Board
from pinpong.board import Board,Pin
from pinpong.board import NeoPixel
import json
Board().begin()
u_gui=GUI()
pin1 = Pin(Pin.P21, Pin.OUT)
pin3 = Pin(Pin.P23, Pin.PWM)
np1 = NeoPixel(pin3,16)
np1.brightness(100)
u_gui.draw_image(image="back.png",x=0,y=0)
u_gui.draw_text(text="M10智能助手",x=10,y=20,font_size=25, color="#FF00FF")
# 设置日志记录器
# Load environment variables from .env file
#load_dotenv()
# Configure logging
logging.basicConfig(
level=logging.INFO,
format='%(asctime)s - %(name)s - %(levelname)s - %(message)s'
)
logger = logging.getLogger('MCP_PIPE')
# Reconnection settings
INITIAL_BACKOFF = 1 # Initial wait time in seconds
MAX_BACKOFF = 600 # Maximum wait time in seconds
reconnect_attempt = 0
backoff = INITIAL_BACKOFF
async def connect_with_retry(uri):
"""Connect to WebSocket server with retry mechanism"""
global reconnect_attempt, backoff
while True: # Infinite reconnection
try:
if reconnect_attempt > 0:
wait_time = backoff * (1 + random.random() * 0.1) # Add some random jitter
logger.info(f"Waiting {wait_time:.2f} seconds before reconnection attempt {reconnect_attempt}...")
await asyncio.sleep(wait_time)
# Attempt to connect
await connect_to_server(uri)
except Exception as e:
reconnect_attempt += 1
logger.warning(f"Connection closed (attempt: {reconnect_attempt}): {e}")
# Calculate wait time for next reconnection (exponential backoff)
backoff = min(backoff * 2, MAX_BACKOFF)
async def connect_to_server(uri):
"""Connect to WebSocket server and establish bidirectional communication with `mcp_script`"""
global reconnect_attempt, backoff
try:
logger.info(f"Connecting to WebSocket server...")
async with websockets.connect(uri) as websocket:
logger.info(f"Successfully connected to WebSocket server")
# Reset reconnection counter if connection closes normally
reconnect_attempt = 0
backoff = INITIAL_BACKOFF
# Start mcp_script process
process = subprocess.Popen(
['python', mcp_script],
stdin=subprocess.PIPE,
stdout=subprocess.PIPE,
stderr=subprocess.PIPE,
encoding='utf-8',
text=True # Use text mode
)
logger.info(f"Started {mcp_script} process")
# Create two tasks: read from WebSocket and write to process, read from process and write to WebSocket
await asyncio.gather(
pipe_websocket_to_process(websocket, process),
pipe_process_to_websocket(process, websocket),
pipe_process_stderr_to_terminal(process)
)
except websockets.exceptions.ConnectionClosed as e:
logger.error(f"WebSocket connection closed: {e}")
raise # Re-throw exception to trigger reconnection
except Exception as e:
logger.error(f"Connection error: {e}")
raise # Re-throw exception
finally:
# Ensure the child process is properly terminated
if 'process' in locals():
logger.info(f"Terminating {mcp_script} process")
try:
process.terminate()
process.wait(timeout=5)
except subprocess.TimeoutExpired:
process.kill()
logger.info(f"{mcp_script} process terminated")
async def pipe_websocket_to_process(websocket, process):
"""Read data from WebSocket and write to process stdin"""
try:
while True:
# Read message from WebSocket
message = await websocket.recv()
logger.debug(f"<< {message[:120]}...")
# Write to process stdin (in text mode)
if isinstance(message, bytes):
message = message.decode('utf-8')
process.stdin.write(message + '\n')
process.stdin.flush()
except Exception as e:
logger.error(f"Error in WebSocket to process pipe: {e}")
raise # Re-throw exception to trigger reconnection
finally:
# Close process stdin
if not process.stdin.closed:
process.stdin.close()
async def pipe_process_to_websocket(process, websocket):
"""Read data from process stdout and send to WebSocket"""
try:
while True:
# Read data from process stdout
data = await asyncio.get_event_loop().run_in_executor(
None, process.stdout.readline
)
if not data: # If no data, the process may have ended
logger.info("Process has ended output")
break
# Send data to WebSocket
logger.debug(f">> {data[:120]}...")
print(data)
# 解析 JSON 字符串
json_str = json.loads(data)
print(json_str['id'])
if json_str['id']>1:
print(json_str['id'])
if json_str.get('result', {}):
text=json.loads(json_str['result']['content'][0]['text'])
if text['success']:
print(text['result'])
L=480
# 处理RGB灯环控制命令
if "开启" in text['result']:
pin1.write_digital(1)
if "关闭" in text['result']:
pin1.write_digital(0)
if "点亮" in text['result']:
np1.range_color(0,15,0xFF0000)
if "熄灭" in text['result']:
np1.clear()
# 新增颜色控制处理
if "设置颜色" in text['result']:
# 从文本中提取颜色值
color_str = text['result'].split("为")[-1].strip()
color_map = {
"红色": 0xFF0000,
"绿色": 0x00FF00,
"蓝色": 0x0000FF,
"黄色": 0xFFFF00,
"紫色": 0x800080,
"青色": 0x00FFFF,
"白色": 0xFFFFFF
}
color_code = color_map.get(color_str, 0xFF0000) # 默认为红色
np1.range_color(0,15,color_code)
# 新增亮度控制处理
if "设置亮度" in text['result']:
# 从文本中提取亮度值
brightness_str = text['result'].split("为")[-1].strip()
try:
brightness = int(brightness_str)
# 确保亮度在0-255范围内
brightness = max(0, min(brightness, 255))
np1.brightness(brightness)
except ValueError:
logger.error(f"无效的亮度值: {brightness_str}")
# In text mode, data is already a string, no need to decode
await websocket.send(data)
except Exception as e:
logger.error(f"Error in process to WebSocket pipe: {e}")
raise # Re-throw exception to trigger reconnection
async def pipe_process_stderr_to_terminal(process):
"""Read data from process stderr and print to terminal"""
try:
while True:
# Read data from process stderr
data = await asyncio.get_event_loop().run_in_executor(
None, process.stderr.readline
)
if not data: # If no data, the process may have ended
logger.info("Process has ended stderr output")
break
# Print stderr data to terminal (in text mode, data is already a string)
sys.stderr.write(data)
sys.stderr.flush()
except Exception as e:
logger.error(f"Error in process stderr pipe: {e}")
raise # Re-throw exception to trigger reconnection
def signal_handler(sig, frame):
"""Handle interrupt signals"""
logger.info("Received interrupt signal, shutting down...")
sys.exit(0)
if __name__ == "__main__":
# Register signal handler
signal.signal(signal.SIGINT, signal_handler)
# mcp_script
#if len(sys.argv) < 2:
# logger.error("Usage: mcp_pipe.py ")
# sys.exit(1)
mcp_script = "move.py"
# Get token from environment variable or command line arguments
#endpoint_url = os.environ.get('MCP_ENDPOINT')
endpoint_url="wss://api.xiaozhi.me/mcp/?token=***********"
if not endpoint_url:
logger.error("Please set the `MCP_ENDPOINT` environment variable")
sys.exit(1)
# Start main loop
try:
asyncio.run(connect_with_retry(endpoint_url))
except KeyboardInterrupt:
logger.info("Program interrupted by user")
except Exception as e:
logger.error(f"Program execution error: {e}")注意:MCP接入地址要换成自己小智的接入点地址。
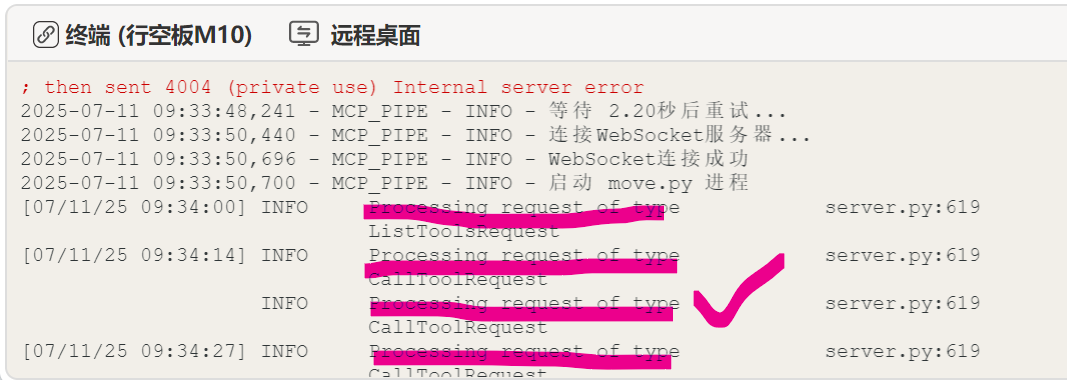
在mind+中点击运行mcp_pipe.py。
稍等一会,成功连接服务器。
下面简化版连接服务器后终端显示如下图:
此时接入点刷新后是这样的:在线,工具可用。
下面就可以用K10小智和M10智能家(MCP)互动了。
上面代码有些地方不够简练,放在DeepSeek中优化了下,得到下面简化版,逻辑更清晰。
# 简化版
# move.py
from mcp.server.fastmcp import FastMCP
import logging
# 配置日志
logger = logging.getLogger('MoveServer')
mcp = FastMCP("MoveServer")
# 设备控制工具
@mcp.tool()
def open_fan() -> dict:
"""开启风扇,行空板M10引脚P21高电平,继电器闭合,小风扇电源接通,开始转动。"""
return {"success": True, "result": "风扇开启"}
@mcp.tool()
def close_fan() -> dict:
"""关闭风扇,行空板M10引脚P21低电平,继电器打开,小风扇电源断开,停止转动。"""
return {"success": True, "result": "风扇关闭"}
@mcp.tool()
def open_light() -> dict:
"""点亮灯环(红色),行空板M10引脚P23RGB灯环点亮。"""
return {"success": True, "result": "灯环已点亮"}
@mcp.tool()
def close_light() -> dict:
"""熄灭灯环,行空板M10引脚P23RGB灯环熄灭。"""
return {"success": True, "result": "灯环已熄灭"}
@mcp.tool()
def set_light_color(color: str) -> dict:
"""设置行空板M10引脚P23RGB灯环颜色,支持: 红色、绿色,蓝色,黄色,紫色,青色,白色"""
return {"success": True, "result": f"设置颜色为{color}"}
@mcp.tool()
def set_light_brightness(brightness: int) -> dict:
"""设置行空板M10引脚P23RGB灯环亮度(0-255)"""
return {"success": True, "result": f"设置亮度为{brightness}"}
# 启动服务器
if __name__ == "__main__":
mcp.run(transport="stdio")# mcp_pipe.py
from unihiker import GUI
import asyncio
import websockets
import subprocess
import logging
import signal
import sys
import random
from pinpong.board import Board, Pin, NeoPixel
import json
# 初始化硬件
Board().begin()
u_gui = GUI()
pin1 = Pin(Pin.P21, Pin.OUT)
pin3 = Pin(Pin.P23, Pin.PWM)
np1 = NeoPixel(pin3, 16)
np1.brightness(100)
# 初始化UI
u_gui.draw_image(image="back.png", x=0, y=0)
u_gui.draw_text(text="M10智能助手", x=10, y=20, font_size=25, color="#FF00FF")
# 配置日志
logging.basicConfig(level=logging.INFO, format='%(asctime)s - %(name)s - %(levelname)s - %(message)s')
logger = logging.getLogger('MCP_PIPE')
# 重连设置
INITIAL_BACKOFF, MAX_BACKOFF = 1, 600
reconnect_attempt, backoff = 0, INITIAL_BACKOFF
async def connect_with_retry(uri):
"""带重连机制的WebSocket连接"""
global reconnect_attempt, backoff
while True:
try:
if reconnect_attempt > 0:
wait_time = min(backoff * (1 + random.random() * 0.1), MAX_BACKOFF)
logger.info(f"等待 {wait_time:.2f}秒后重试...")
await asyncio.sleep(wait_time)
await connect_to_server(uri)
except Exception as e:
reconnect_attempt += 1
backoff = min(backoff * 2, MAX_BACKOFF)
logger.warning(f"连接关闭 (尝试: {reconnect_attempt}): {e}")
async def connect_to_server(uri):
"""连接到WebSocket服务器"""
global reconnect_attempt, backoff
try:
logger.info("连接WebSocket服务器...")
async with websockets.connect(uri) as websocket:
logger.info("WebSocket连接成功")
reconnect_attempt, backoff = 0, INITIAL_BACKOFF
process = subprocess.Popen(
['python', mcp_script],
stdin=subprocess.PIPE,
stdout=subprocess.PIPE,
stderr=subprocess.PIPE,
encoding='utf-8',
text=True
)
logger.info(f"启动 {mcp_script} 进程")
await asyncio.gather(
pipe_websocket_to_process(websocket, process),
pipe_process_to_websocket(process, websocket),
pipe_process_stderr_to_terminal(process)
)
except websockets.exceptions.ConnectionClosed as e:
logger.error(f"WebSocket连接关闭: {e}")
raise
except Exception as e:
logger.error(f"连接错误: {e}")
raise
finally:
if 'process' in locals():
logger.info(f"终止 {mcp_script} 进程")
try:
process.terminate()
process.wait(timeout=5)
except subprocess.TimeoutExpired:
process.kill()
async def pipe_websocket_to_process(websocket, process):
"""WebSocket到进程的管道"""
try:
while True:
message = await websocket.recv()
logger.debug(f"<< {message[:120]}...")
process.stdin.write(message + '\n')
process.stdin.flush()
except Exception as e:
logger.error(f"WebSocket到进程错误: {e}")
raise
finally:
if not process.stdin.closed:
process.stdin.close()
async def pipe_process_to_websocket(process, websocket):
"""进程到WebSocket的管道"""
try:
while True:
data = await asyncio.get_event_loop().run_in_executor(None, process.stdout.readline)
if not data:
break
logger.debug(f">> {data[:120]}...")
await handle_device_commands(data, websocket)
except Exception as e:
logger.error(f"进程到WebSocket错误: {e}")
raise
async def handle_device_commands(data, websocket):
"""处理设备控制命令"""
try:
json_str = json.loads(data)
if json_str['id'] > 1 and json_str.get('result', {}):
text = json.loads(json_str['result']['content'][0]['text'])
if text['success']:
cmd_result = text['result']
# 风扇控制
if "开启" in cmd_result: pin1.write_digital(1)
if "关闭" in cmd_result: pin1.write_digital(0)
# RGB灯环控制
if "点亮" in cmd_result: np1.range_color(0, 15, 0xFF0000)
if "熄灭" in cmd_result: np1.clear()
if "设置颜色" in cmd_result: handle_color(cmd_result)
if "设置亮度" in cmd_result: handle_brightness(cmd_result)
await websocket.send(data)
except Exception as e:
logger.error(f"命令处理错误: {e}")
def handle_color(cmd_result):
"""处理颜色设置"""
color_str = cmd_result.split("为")[-1].strip()
color_map = {
"红色": 0xFF0000, "绿色": 0x00FF00, "蓝色": 0x0000FF,
"黄色": 0xFFFF00, "紫色": 0x800080, "青色": 0x00FFFF, "白色": 0xFFFFFF
}
np1.range_color(0, 15, color_map.get(color_str, 0xFF0000))
def handle_brightness(cmd_result):
"""处理亮度设置"""
brightness_str = cmd_result.split("为")[-1].strip()
try:
brightness = max(0, min(int(brightness_str), 255))
np1.brightness(brightness)
except ValueError:
logger.error(f"无效亮度值: {brightness_str}")
async def pipe_process_stderr_to_terminal(process):
"""进程错误输出到终端"""
try:
while True:
data = await asyncio.get_event_loop().run_in_executor(None, process.stderr.readline)
if not data: break
sys.stderr.write(data)
sys.stderr.flush()
except Exception as e:
logger.error(f"错误输出处理错误: {e}")
def signal_handler(sig, frame):
"""中断信号处理"""
logger.info("收到中断信号,正在关闭...")
sys.exit(0)
if __name__ == "__main__":
signal.signal(signal.SIGINT, signal_handler)
mcp_script = "move.py"
endpoint_url = "wss://api.xiaozhi.me/mcp/?token=**********"
try:
asyncio.run(connect_with_retry(endpoint_url))
except KeyboardInterrupt:
logger.info("用户中断程序")
except Exception as e:
logger.error(f"程序执行错误: {e}")【小结】
1、挺好玩的项目,欢迎大家一起来玩,改一改,可以实现更多功能。
2、K10小智的最新版本能控制板载RGB灯的颜色和亮度,在实操时小智有时会搞混,要表达清晰任务要求,其它低版本小智就没有这种担心了。
例如用乐动掌控的小智,控制效果如下面视频:


 他的勋章
他的勋章
罗罗罗2025.12.02
666