 返回首页
返回首页
 回到顶部
回到顶部
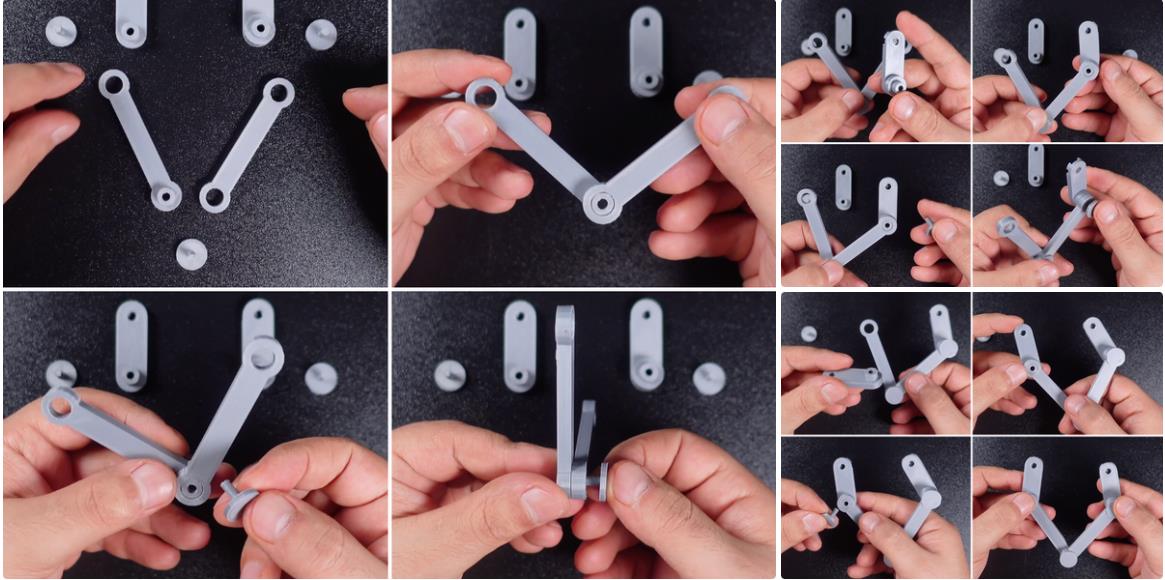
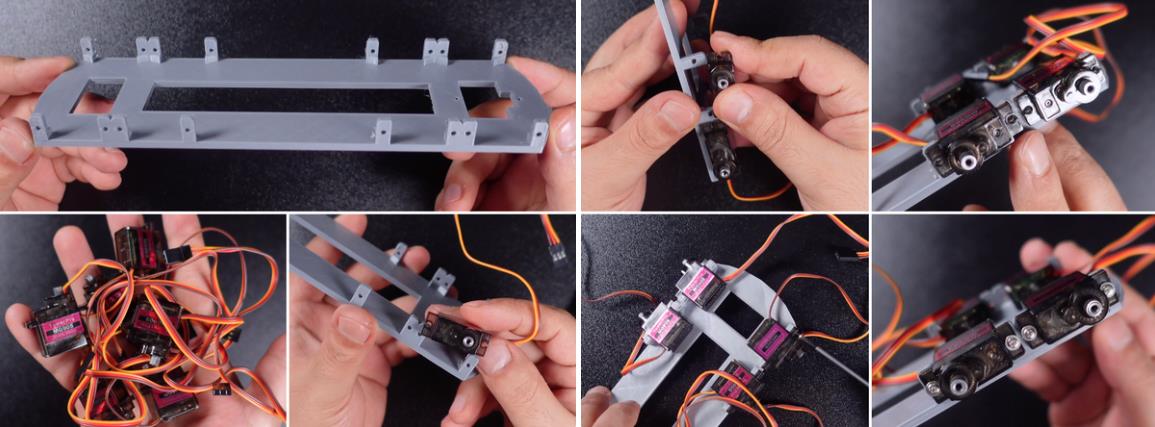
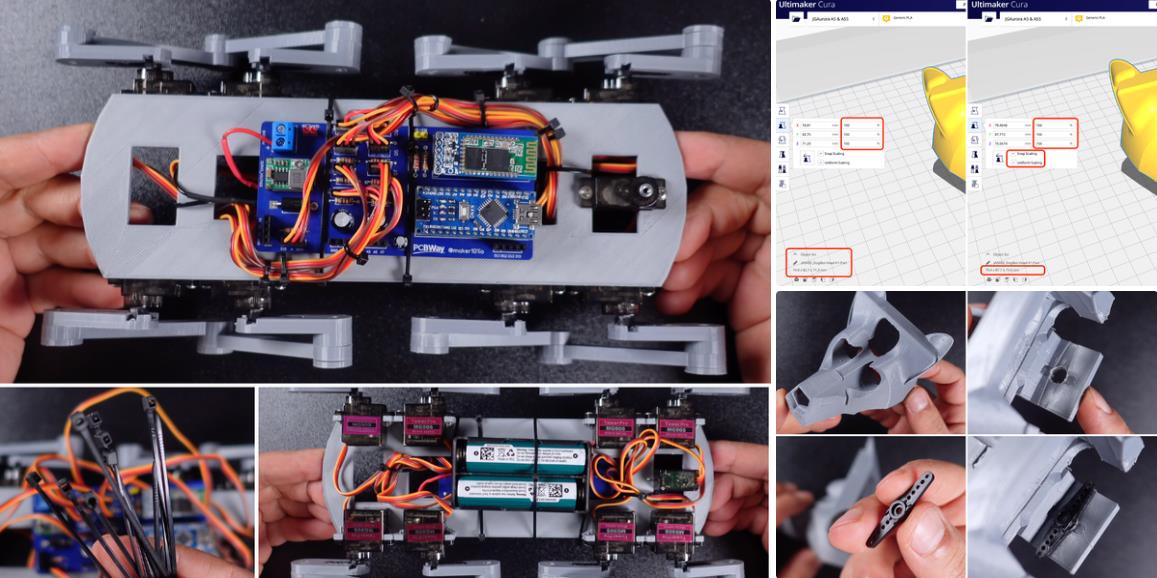
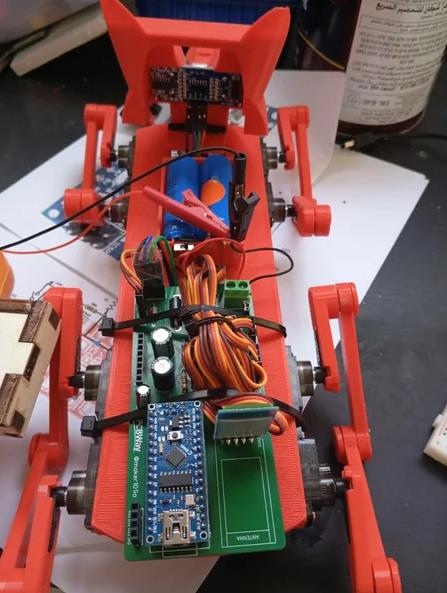
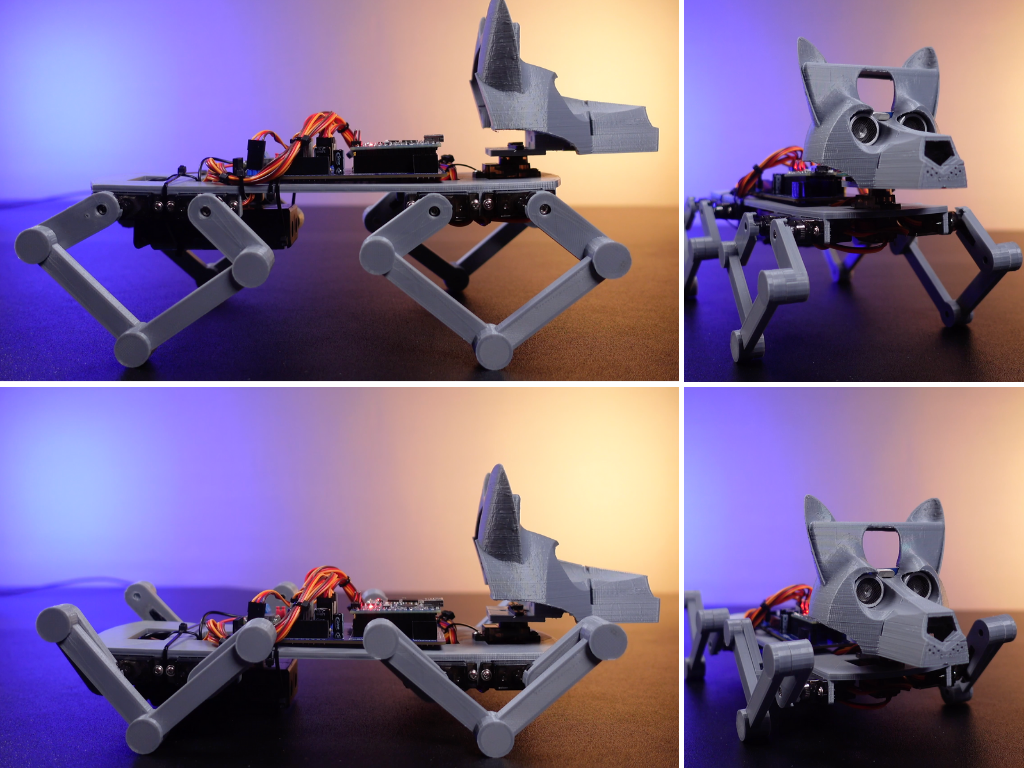
嘿,你好!在这个项目中,你会找到一个简单的狗模型机器人的 3D 零件组装、源代码和 Android 应用程序,它可以执行基本动作,如走路、转弯、下降、上升和打招呼......在这个项目中,我使用了我之前设计的基于 Arduino Nano 的多伺服电机控制板。该板可以控制多达 9 个伺服电机,以及通过蓝牙模块进行无线伺服电机控制。此外,还可以通过板上的可调电压模块控制不同类型的伺服电机。
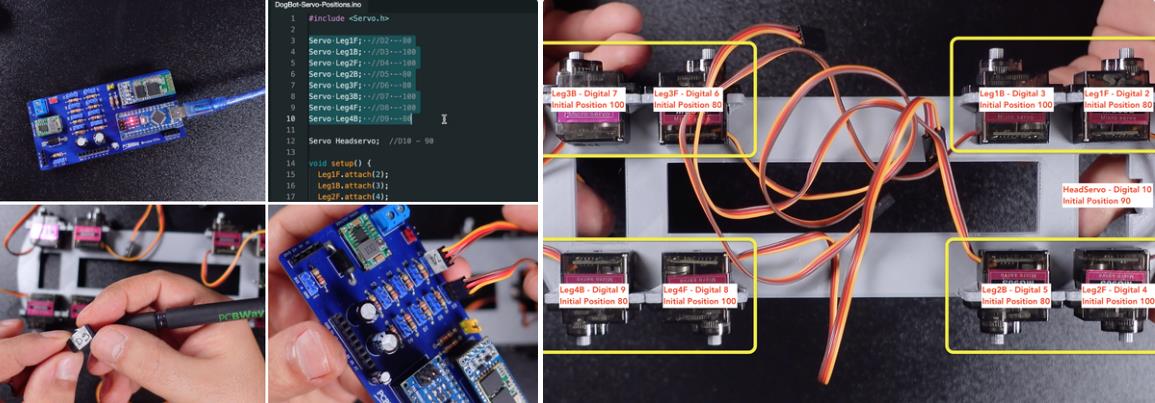
我设计的板子最多可以控制 9 个伺服电机,还允许您使用安装在其上的蓝牙模块无线控制电机。
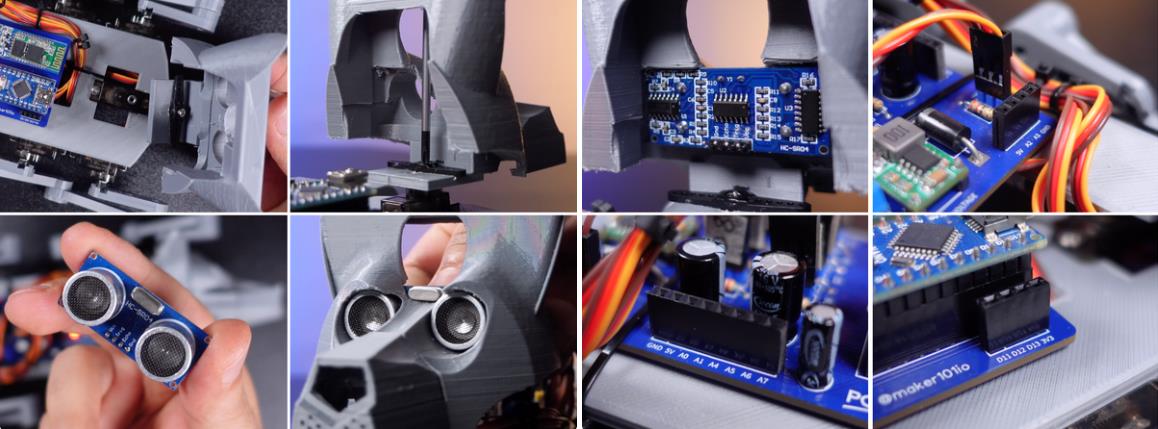
如果我们仔细看一下设计的电路图,板上有一个可调的稳压器模块。转换器模块可以根据伺服电机的功率需求调整电压,独立于 Arduino Nano。可以使用模块上的电位计调整所需的电压电平。在伺服电机电源线中添加了肖特基二极管,其功能是通过帮助控制电源线波动、电压反向流动和电磁噪声来提高电路的可靠性。我还在电路中添加了两个电容器。伺服电机在突然运动时可能需要大量电流。电容器可用于满足这种突然的电力需求,稳定电源,还有助于减少电源波动。
我还为每个伺服电机信号腿添加了一个电阻器。电阻器在电路中充当保护电阻器。电阻器通过以某种方式限制来自微控制器的信号,保护伺服电机的信号腿免受过流和有害电压的影响。
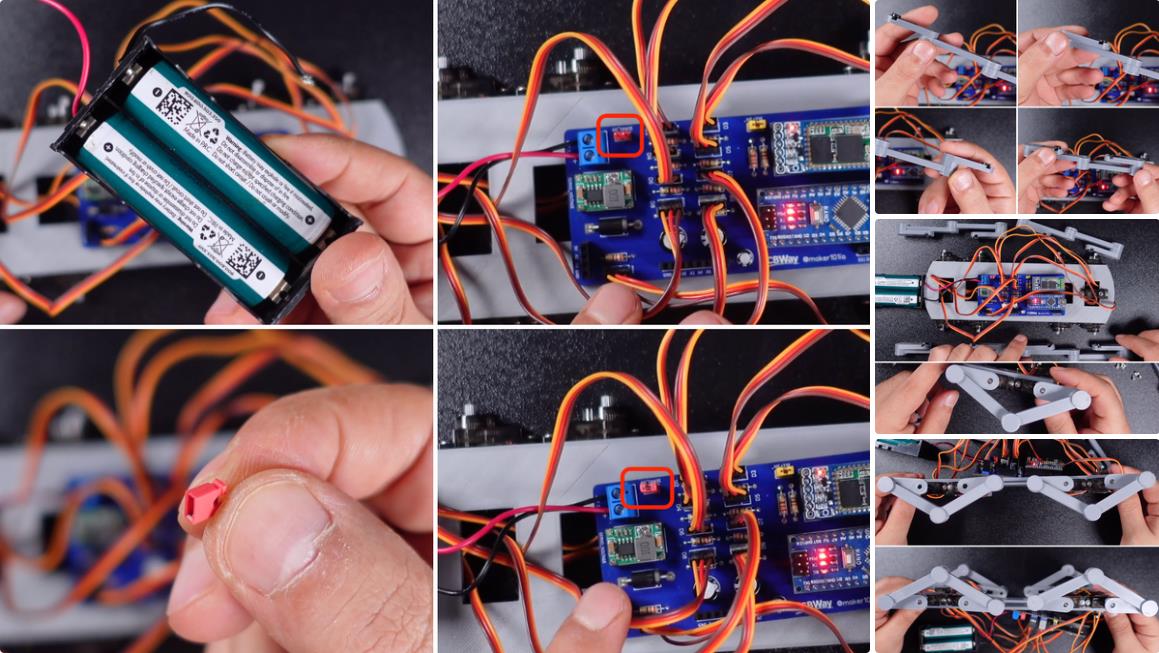
由于伺服电机和 Arduino Nano 通常使用电路的电源线,因此在对微控制器进行编程时,增加了一个跳线来断开伺服电机所连接的电源线。蓝牙模块也是如此,由于编程过程中 TX 和 RX 引脚繁忙,因此在蓝牙电源输入端增加了一个跳线,以防止通信错误,从而可以在编程过程中切断蓝牙电源。最后,在 Arduino Nano VIN 电源输入端添加了一个电容器,以减少功率波动。
印刷质量与印刷电路板的设计一样重要。多年来,我一直与 PCBWay 成功合作进行 PCB 打印服务。我定期将项目的所有必要文件和详细信息上传到 PCBWay 的项目共享页面。在这种情况下,您可以使用提供的链接访问项目的详细信息和设计文件,查看项目,如果您愿意,您可以让此电路板仅使用 PCB 或组装的 PCB 服务。您可以访问链接以转到项目页面并下载设计文件。
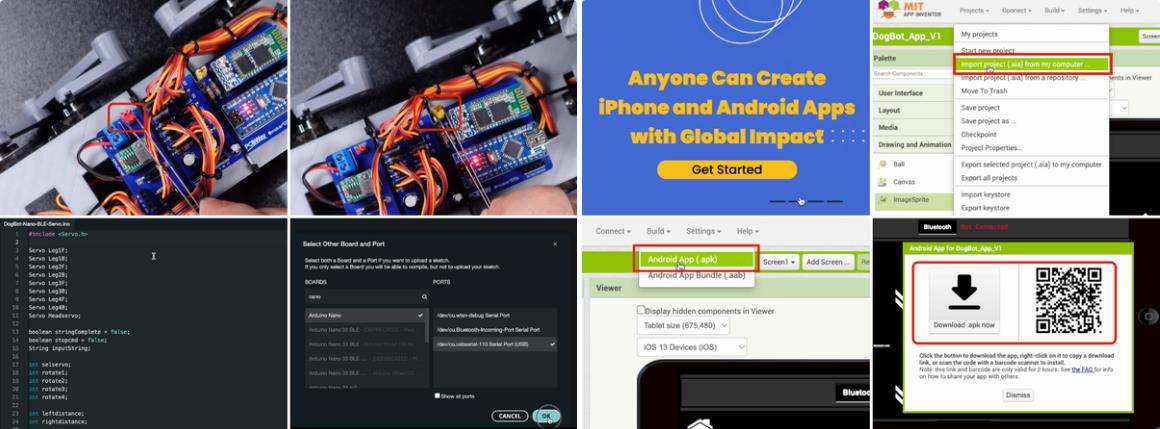
上传代码并安装应用程序后,重新连接板的电源跳线。打开 Android 设备的蓝牙连接,并将其与列表中名为 HC-06x 的蓝牙模块配对。配对时可能会要求输入密码,通常默认密码为 1234(或 0000)。然后打开 Dog Robot 应用程序,列出蓝牙设备,在列表中找到蓝牙模块,然后选择它。
如果连接成功,应用程序将切换到控制界面。现在你可以移动你的狗机器人了,试着让它说 Hi!感谢您的阅读,不要忘记点赞和关注!




【Arduino 动手做】探索简单的 3D 狗机器人和多个伺服电机控制板
项目链接:https://www.instructables.com/Explore-Simple-3D-Dog-Robot-and-Multiple-Servo-Mot/
https://www.pcbway.com/project/shareproject/Explore_using_a_customized_Arduino_Nano_based_board_to_wirelessly_control_up_to_078e9d15.html
项目作者:MertArduino
项目视频:https://www.youtube.com/watch?v=NlUgbXlzpAw
项目代码:https://content.instructables.com/FI0/B5FG/LTEDQNHG/FI0B5FGLTEDQNHG.ino
https://content.instructables.com/F5S/VATY/LTEDQOVY/F5SVATYLTEDQOVY.ino
3D 文件:
https://content.instructables.com/FJ1/K4XV/LTEDQOBQ/FJ1K4XVLTEDQOBQ.stl
https://content.instructables.com/FUN/N9I7/LTEDQODJ/FUNN9I7LTEDQODJ.stl
https://content.instructables.com/FMG/A6NV/LTEDQO9H/FMGA6NVLTEDQO9H.stl



 他的勋章
他的勋章

评论