 返回首页
返回首页
 回到顶部
回到顶部
我曾是玩具设计师、现任 YouTube 制作者和通用机器人技术、电气和机械工程师,我热衷于自己动手,并通过反复试验进行创新。我的频道是我分享一些有用和不那么有用的发明、设计和创客建议的地方。钢铁侠是我的首选角色扮演,3D 打印可以解决大多数问题 - 螺栓断裂、零件缺失、世界饥饿,应有尽有。
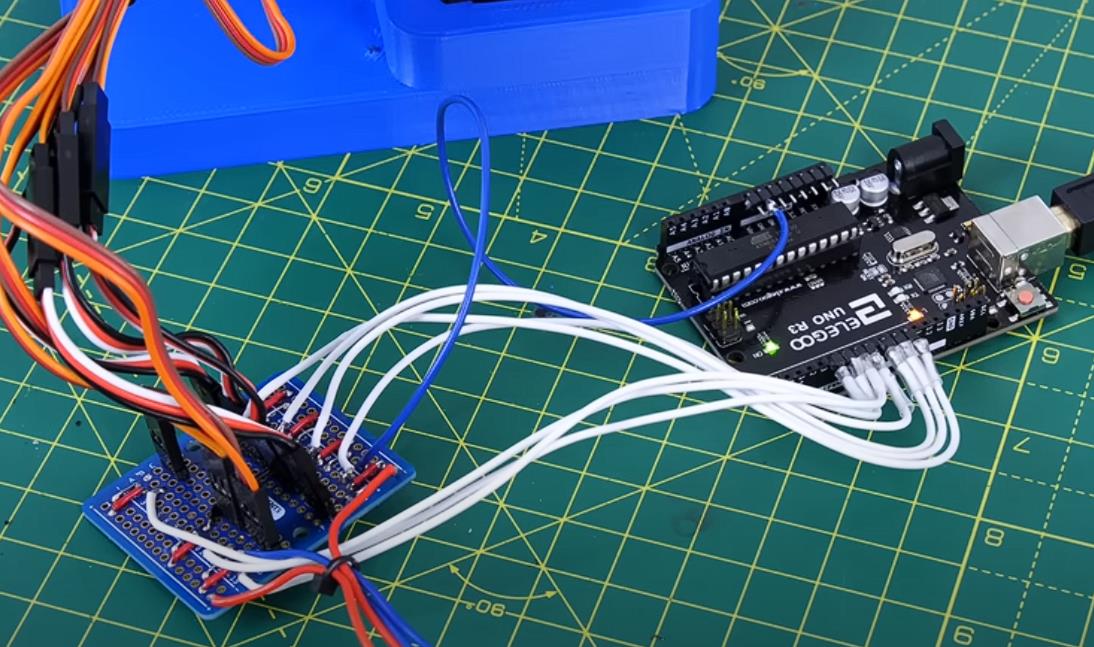
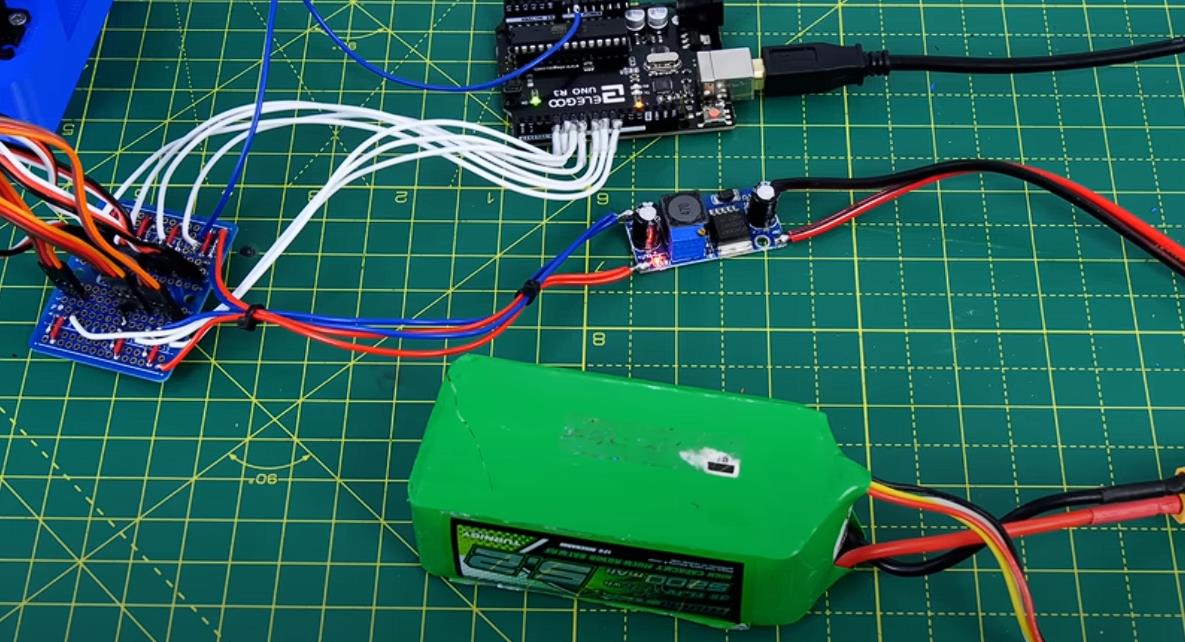
这里使用 Arduino 伺服库可以轻松移动 r/c 伺服器和其他执行器。这意味着伺服系统非常突然地停止和启动,在位置之间尽可能快地移动。在本视频中,我将向您展示两行非常简单的代码,以使作更加顺畅。
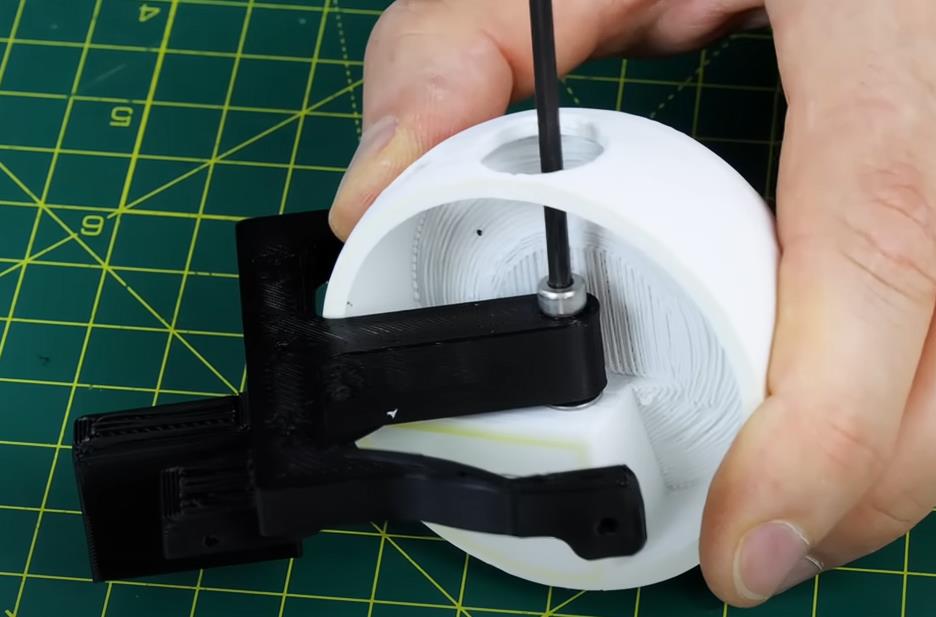


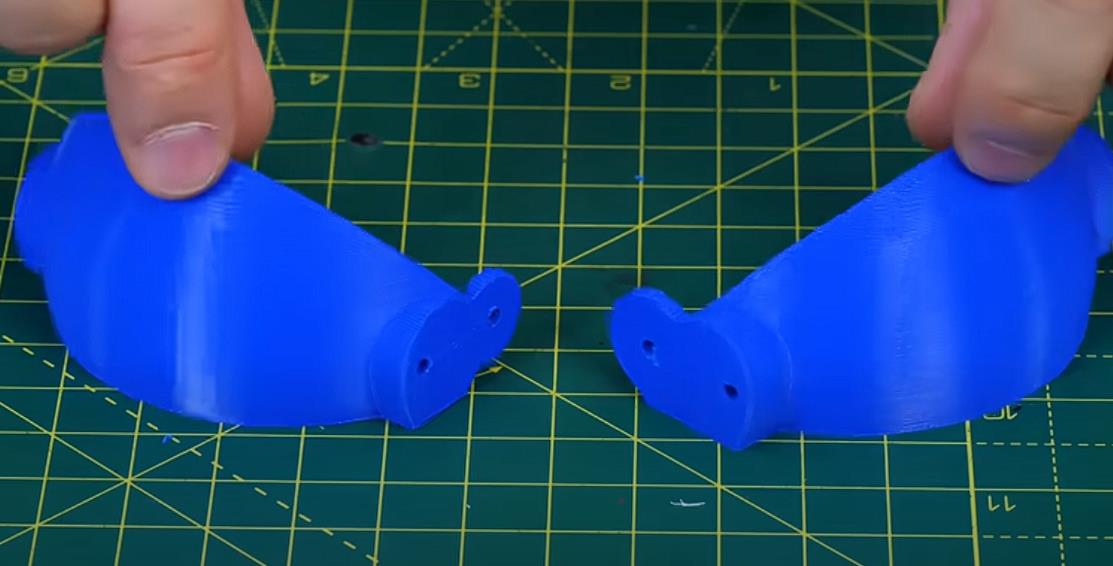



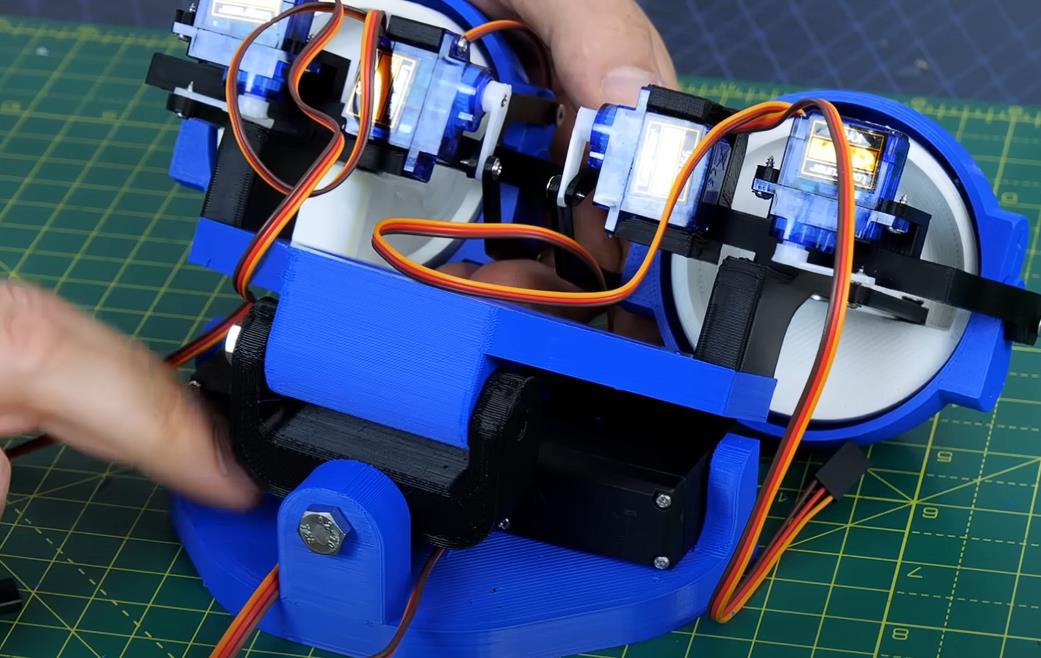
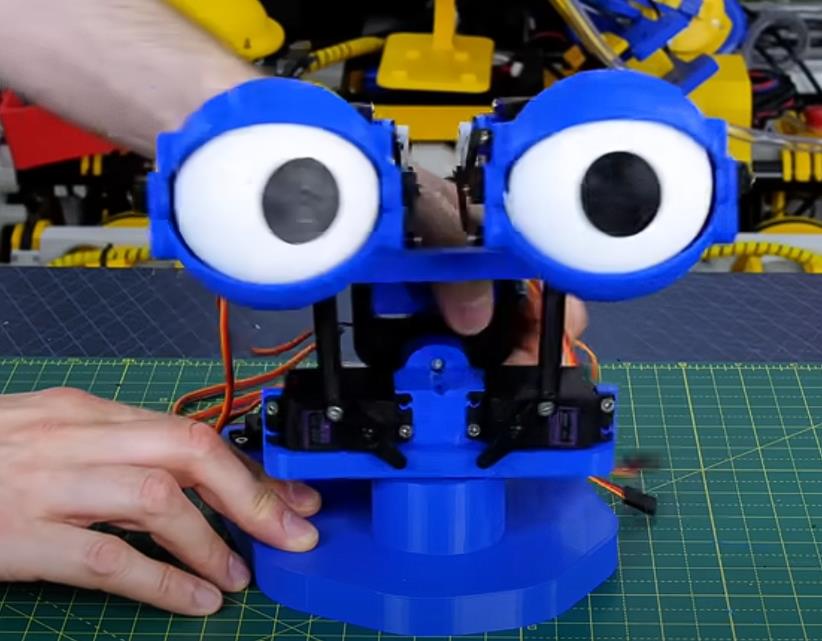
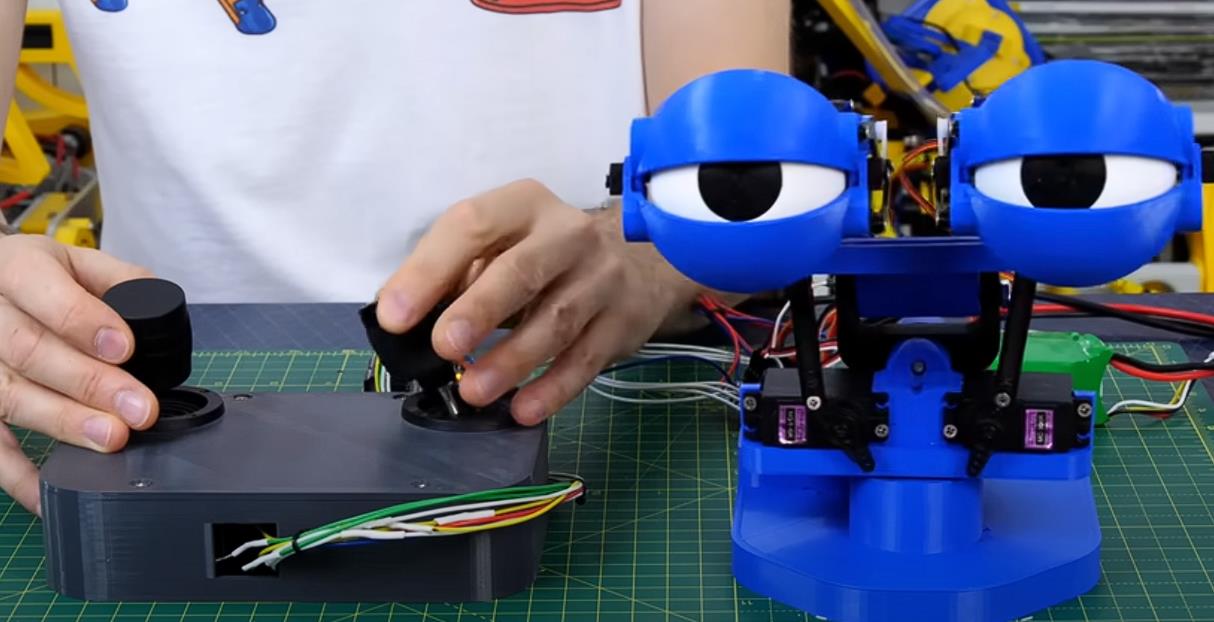

【Arduino 动手做】如何让眼睛机器人平稳移动与动作顺畅
项目链接:https://www.youtube.com/watch?v=jsXolwJskKM&t=35s
项目作者:北马其顿 米尔塞姆克(Mirko Pavleski)
项目视频 :https://www.youtube.com/watch?v=jsXolwJskKM&t=35s
项目代码:https://github.com/XRobots/ServoSmoothing/tree/main/code
3D 文件:https://github.com/XRobots/ServoSmoothing/tree/main/CAD


 他的勋章
他的勋章

评论