 返回首页
返回首页
 回到顶部
回到顶部
每年在图卢兹(法国)都会举办图卢兹机器人竞赛 #TRR2021
比赛包括两足和四足机器人的 10 米自主冲刺。
我目前收集的四足动物记录是 42 米短跑 10 秒。
因此,考虑到这一点,我必须想出一个计划,设计一个我认为可以击败它的机器人,从而成为新的卫冕冠军!!
从 Instructables 成员“jegatheesan.soundarapandian”和去年图卢兹机器人竞赛“Oracid 1”的获胜者那里寻求一点灵感,他们似乎都喜欢设计和分享有关如何构建四足动物的教程。我开始基本上复制那里的设计并把它做得更大一点!
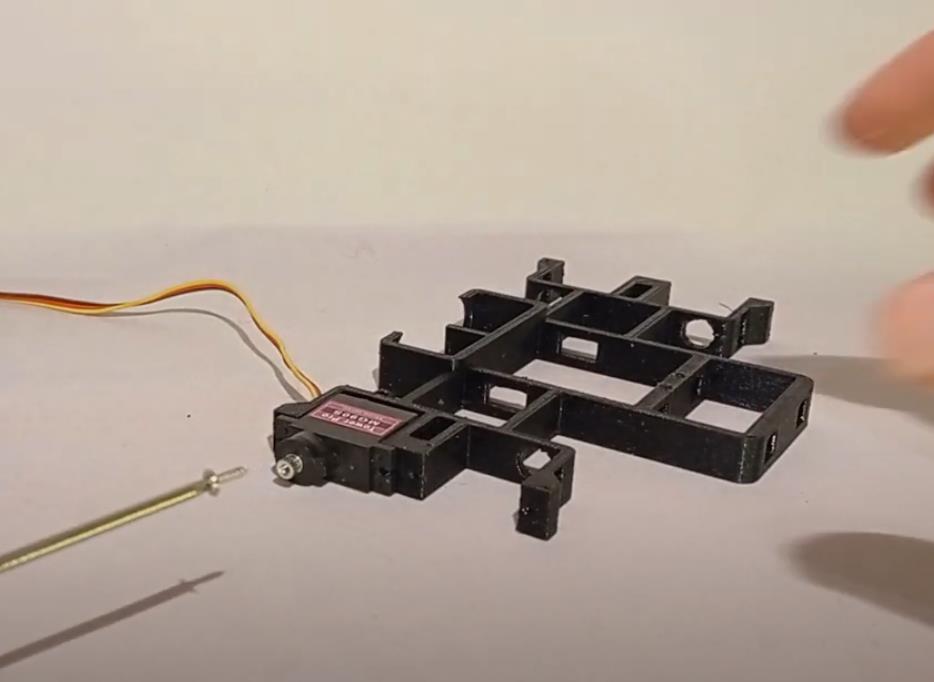
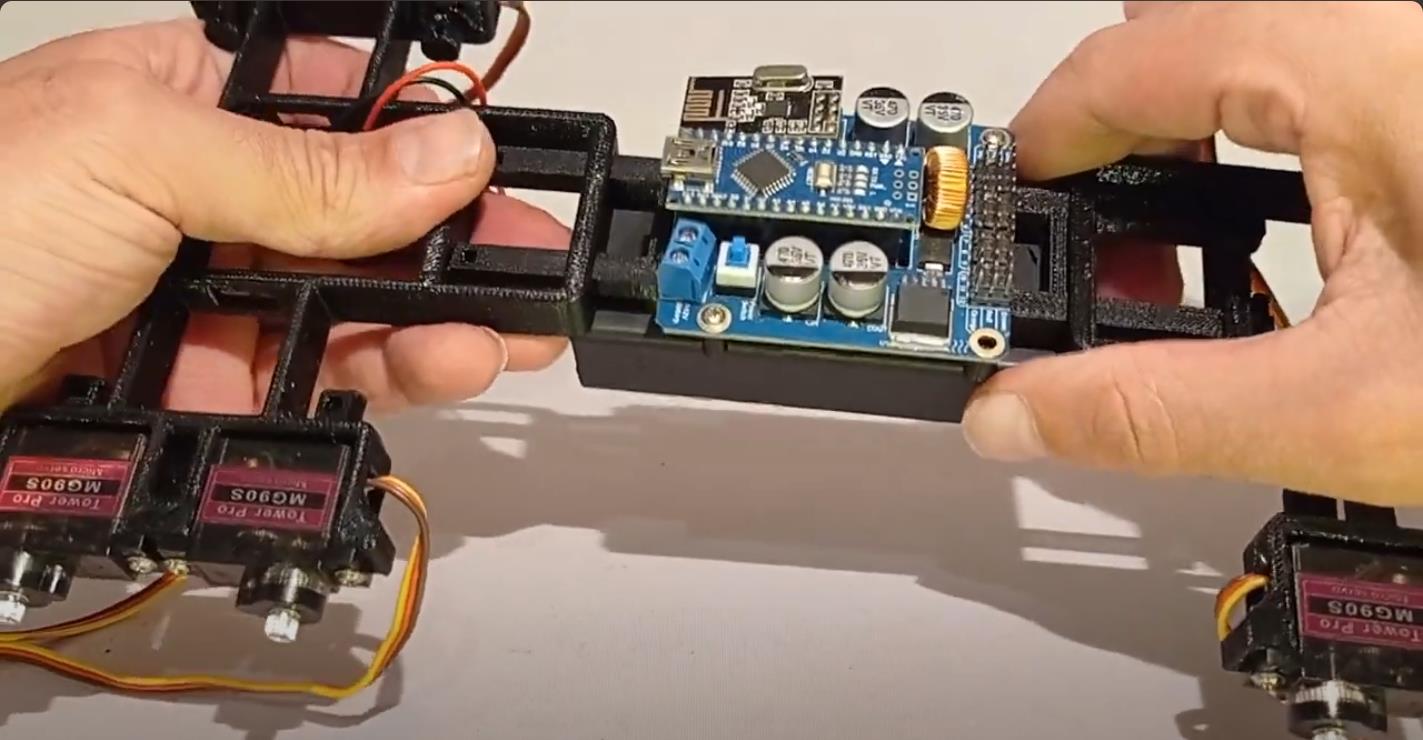
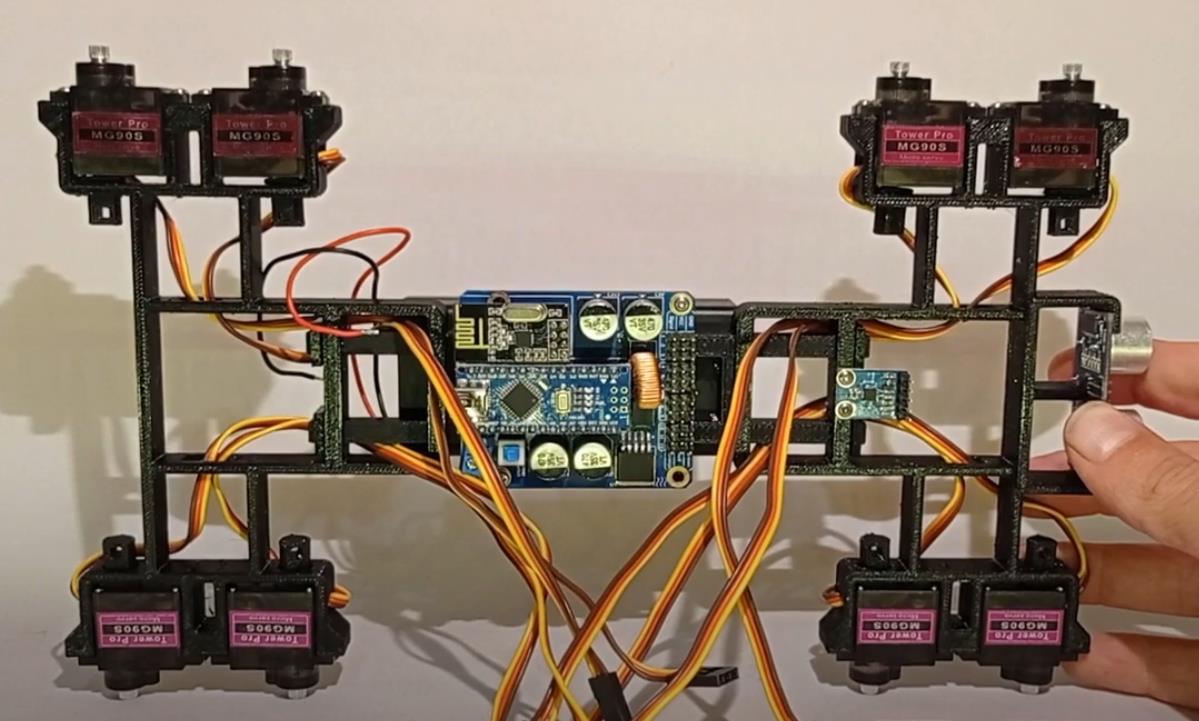
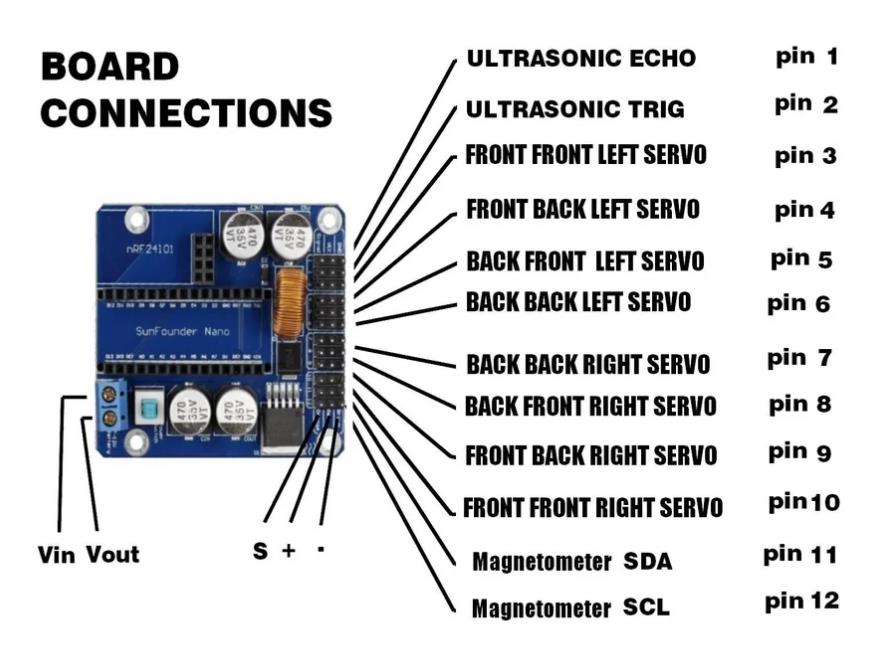
该设计基于每个支腿的 5 杆联动机构,每个支腿有 2 个舵机为,总共有 8 个舵机。
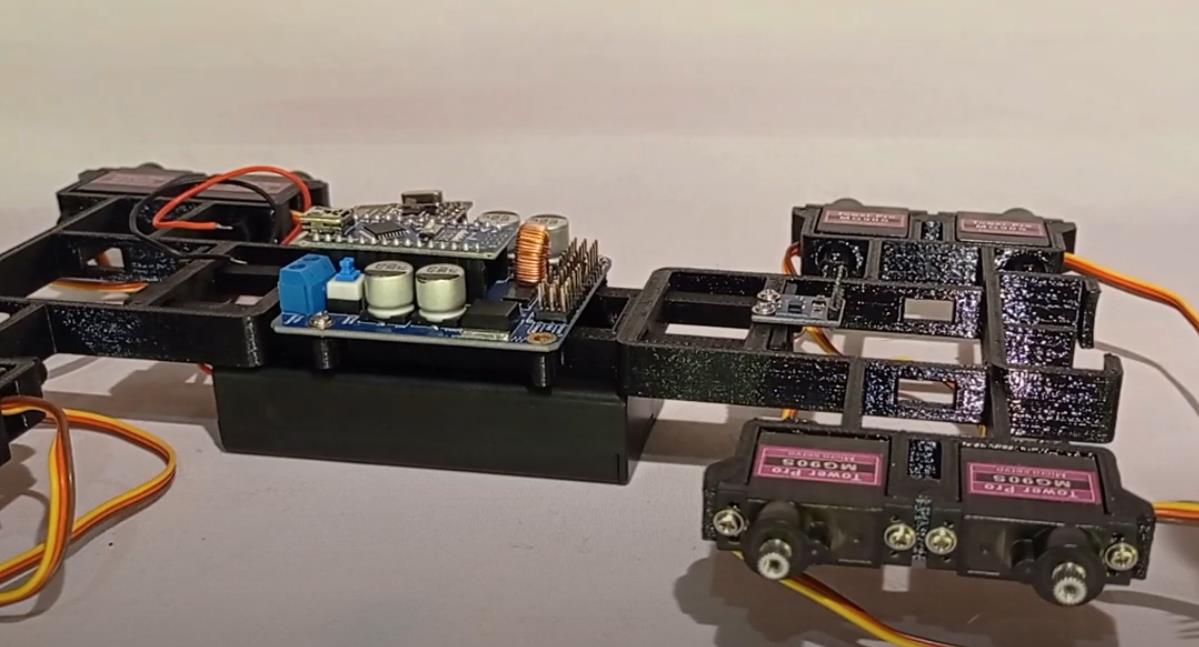
规则规定,除了起跑信号外,整个比赛必须由机器人自主进行,所以我不得不想出一个轻量级的系统来保持机器人在轨道上,在这种情况下,我使用了 QMC5883L磁力计(数字罗盘),这样它就可以忠实于其方向,一个 HC-SR04 超声波传感器,以防机器人真的搞砸并开始以 90 度撞墙angle,我只是在代码中使用了一个计步器来告诉它 10 米应该做多少步。
如果您有兴趣构建这个机器人,请不要担心,这只猴子已经考虑了一切!
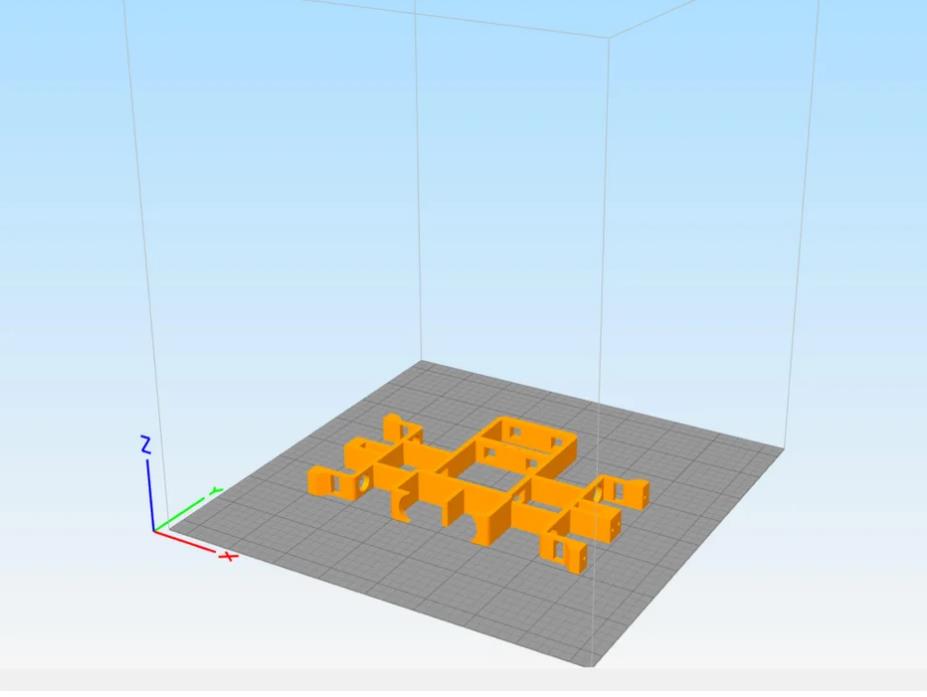
100% 支持免费 3D 打印机身:
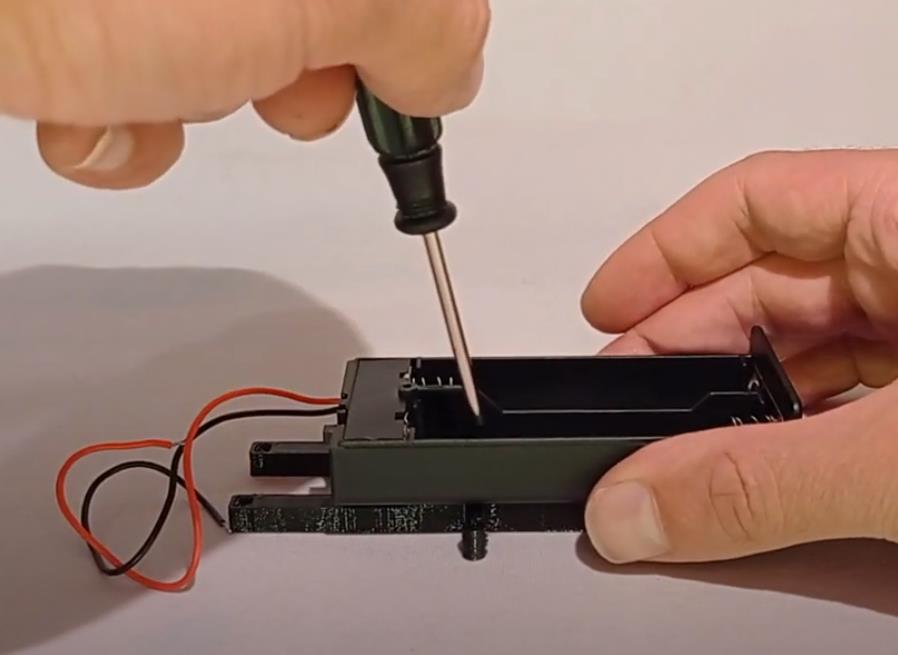
除了电子设备和连接电子设备的螺钉外,所有东西都可以 3D 打印,唯一的小十字螺丝是唯一使用的,您只需要一把小十字螺丝刀来组装机器人
易于即插即用的电子元件:
无需复杂的焊接
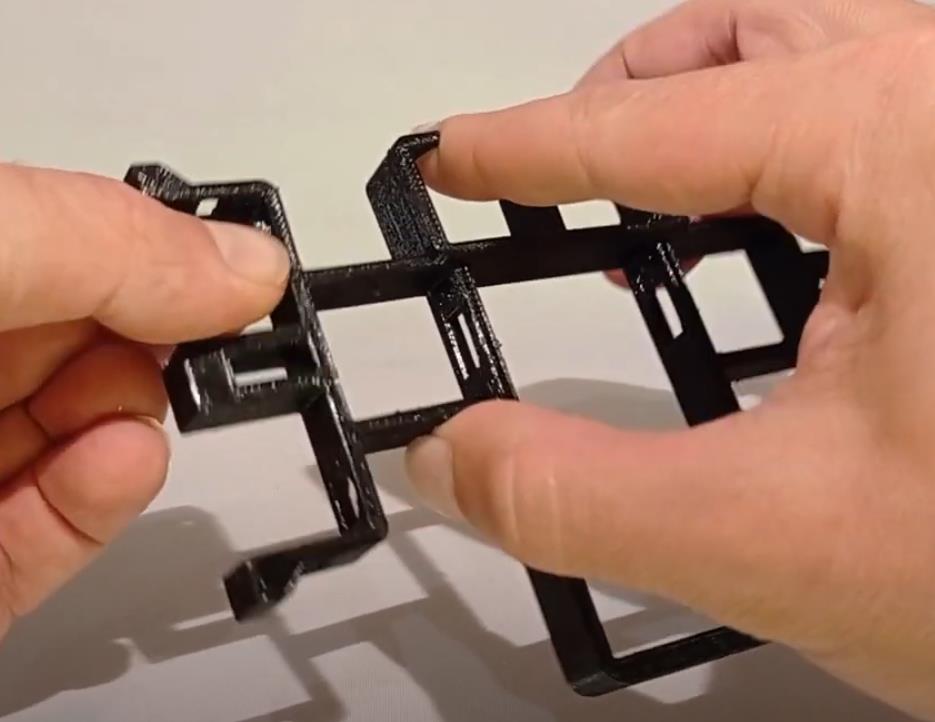
合理的打印时间:
他可能看起来高大威严,但他只有 15 小时的打印时间(好吧,对于一些:D来说,时间很长)
合理的构建体积要求:
它可以在相对较小的打印机上打印,建模体积仅为长:150 毫米 x 宽:150 毫米 x 高:25 毫米
机器人总成本:
仅机器人本身就需要花费 75 美元来构建充电器
如果您想要与我相同的设置,则需要 3D 打印控制器(可选)。
警告:
我使用的 5V 3A 电源并不是最好的解决方案,因为要让这个机器人走路,所有 8 个伺服必须同时运行,因此它们消耗了相当大的电流,不用担心,我没有让机器人着火或任何东西,但预计功率晶体管会发热很多,我不建议一次使用机器人超过 2 分钟,让它在两者之间冷却运行以避免对 Servo shield 造成任何不必要的损坏。
如果你们中的任何人有解决这个问题的方法,我们将不胜感激!
用品
机器人用品:
8x Tower Pro MG90S 模拟 180 度伺服(全球速卖通/亚马逊)
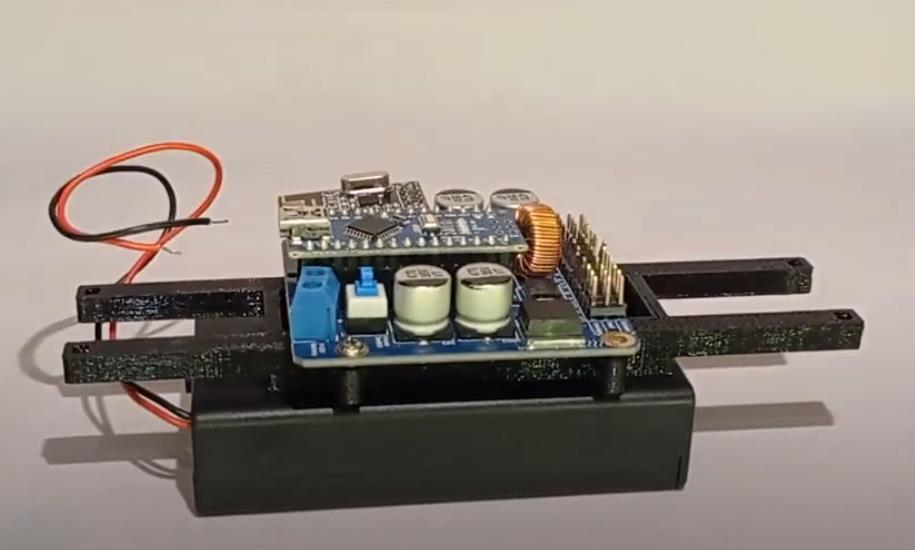
1x Sunfounder 无线伺服控制板 (Sunfounder Store/ RobotShop)
1 个 Arduino NANO(全球速卖通/亚马逊)
1x NRF24L01 收发器模块(如果您不使用控制器,则不需要这个)(Aliexpress/Amazon)
1x 磁力计(数字罗盘)QMC5883L GY-273(全球速卖通/亚马逊)
1 个超声波传感器 HC-SR04(全球速卖通/亚马逊)
2 节 18650 3.7V 锂离子电池(Aliexpress/Amazon)
1 个 18650 双电池座,带开关(Aliexpress/Amazon)
1 个 18650 锂离子电池充电器(Aliexpress/Amazon)
4 根母对母杜邦跨接电缆,长度为 10 厘米(全球速卖通/亚马逊)
4 根 20 厘米长的母对母杜邦跨接电缆(全球速卖通/亚马逊)
10 颗螺丝 2mm x 8mm(与一包伺服器中的螺丝相同)(Aliexpress/Amazon)
手动模式:
打开机器人和控制器,并使用纵杆的上下左右方向检查机器人是否正常行走。
按下向下按钮,机器人应该会跳起一段小舞
如果一切正常,伺服系统校准良好,您现在可以尝试自主模式。
自主模式
自主冲刺模式使用磁力计保持机器人恒定方向运行 2.5 米。您可以使用控制器对所需的位置和所需的校正角度进行编程
打开机器人和控制器
向各个方向移动机器人以校准磁力计 5 秒钟
将机器人放在地面上您希望他进入的所需位置
按向上按钮以记住该标题
将机器人向所需航向左侧旋转 30-45 度
按左按钮可记住该位置
将机器人向所需航向右侧旋转 30-45 度
按右侧按钮可记住该位置
将机器人放回其所需的航向
按下纵杆按钮启动机器人
机器人将沿恒定方向运行 2.5 米,然后停下来坐下并跳胜利舞。
我的机器人设法在 7.5 秒内完成了 2.5 米。
这让我的理论时间在 30 秒内跑出 10 米,希望这足以让我在图卢兹机器人比赛中取得好成绩。

【Arduino 动手做】GorillaBot,3D 打印的 Arduino 自主 Sprint 四足机器人
项目链接:https://www.instructables.com/GorillaBot-the-3D-Printed-Arduino-Autonomous-Sprin/
项目作者:Sebastian Coddington in Circuits
项目视频 :https://www.youtube.com/watch?v=g1PQhhseAVc
https://youtu.be/nMdAFCHdepk
https://www.instructables.com/GorillaBot-the-3D-Printed-Arduino-Autonomous-Sprin/
https://www.youtube.com/watch?v=nMdAFCHdepk
项目代码:https://content.instructables.com/FX0/BYLH/KE48WV4Z/FX0BYLHKE48WV4Z.ino
3D 文件:https://www.thingiverse.com/thing:4577379




 他的勋章
他的勋章

评论