 返回首页
返回首页
 回到顶部
回到顶部
7.2
【任务预设】
今天想尝试一下M10仰望小车+M10 摇杆遥控器蓝牙控制。
 遥控器由M10+摇杆组成,有了电池扩展板的加持,功能强大且便携。它将做为蓝牙客户端,向小车上M10蓝牙服务器发送控制数据。
遥控器由M10+摇杆组成,有了电池扩展板的加持,功能强大且便携。它将做为蓝牙客户端,向小车上M10蓝牙服务器发送控制数据。
仰望小车上的M10为蓝牙服务端,它将接收数据并驱动小车运行。
材料清单
- 行空板M10 X2
- M10电池扩展板组合 X2
- 摇杆模块 X1
- 乐高积木小车构件 X1
步骤1 M10小车搭建
我的M10版仰望小车是模块化设计,它分为前轮转向部分、后轮驱动部分和M10车体连接部分,在做其它项目时可以方便的拆开,用小车时可以快速组装。


步骤2 M10遥控器(客户端)程序编写

摇杆X轴接P21
摇杆Y轴接P22
1、Mind+--Python模式--加载行空板。

2、加载相关库。


3、程序
要先在小车端M10(服务端)上读取蓝牙服务器的配对码:
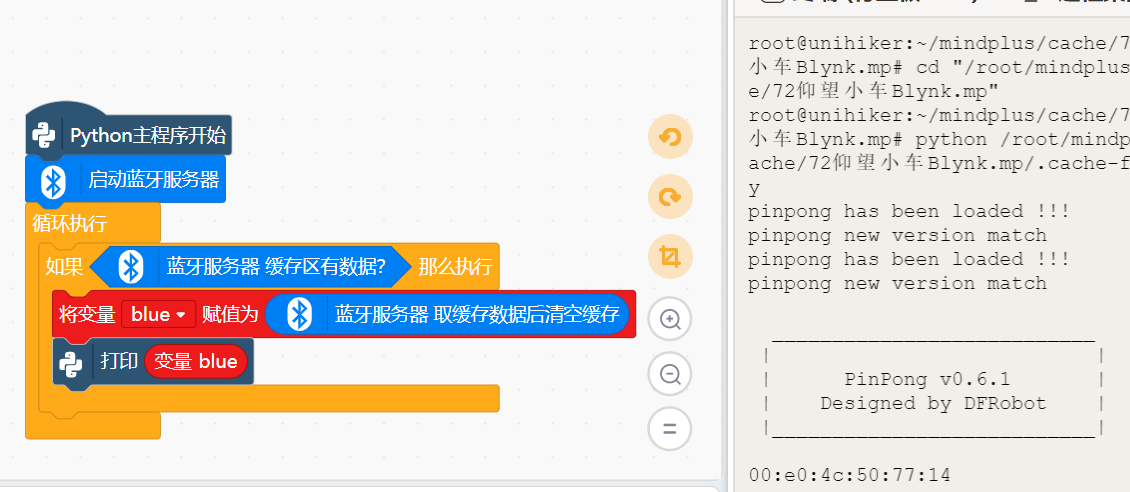
然后在遥控M10(客户端)上写程序:
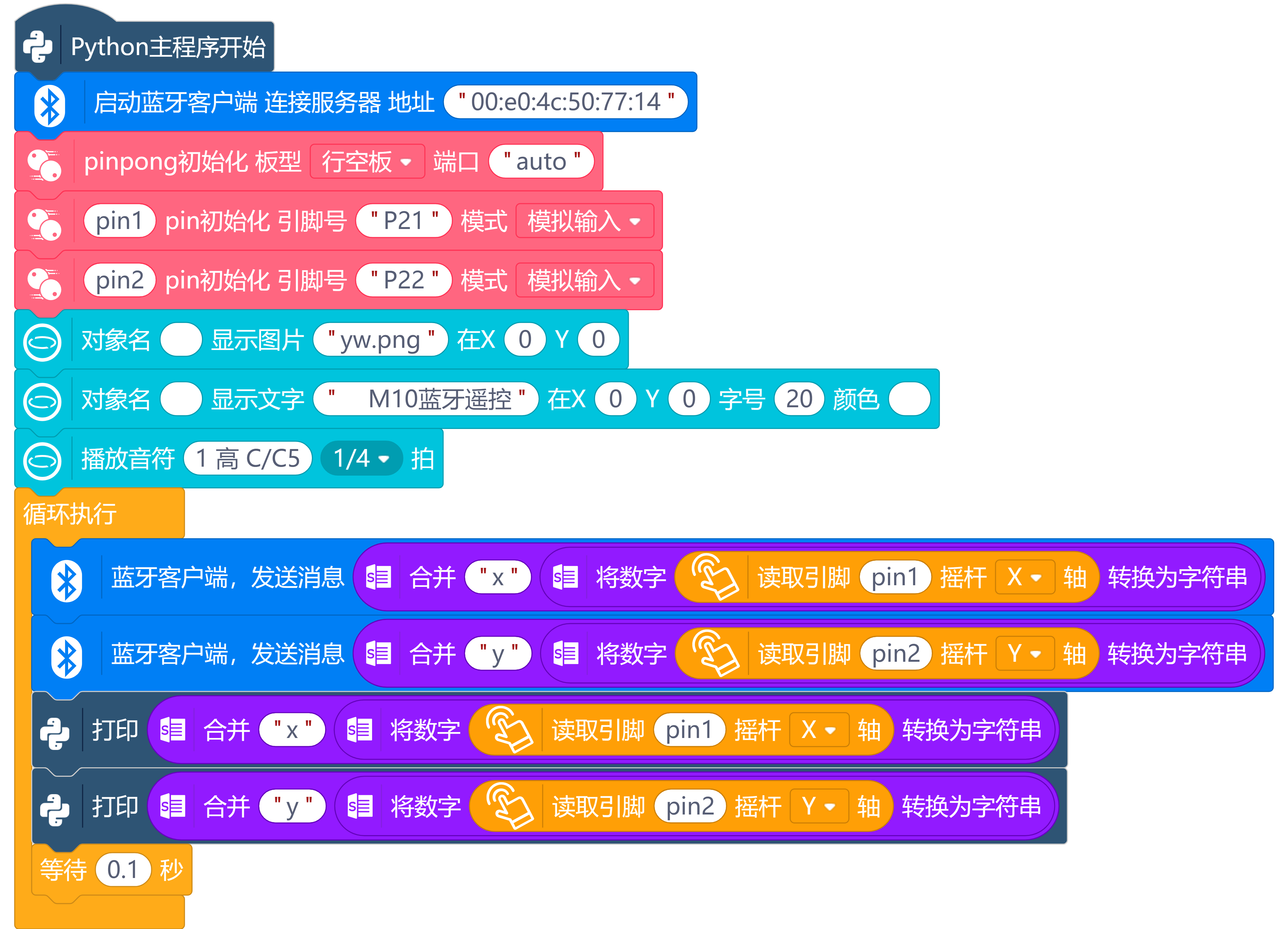
按照我的遥控器摇杆安装方式,我计划用y轴数据(左-右)4095-0来遥控小车方向,x轴数据(上-下)4095-0来遥控小车前进后退停止和车速。
为了将两数据区分,分别用x、y来标记。
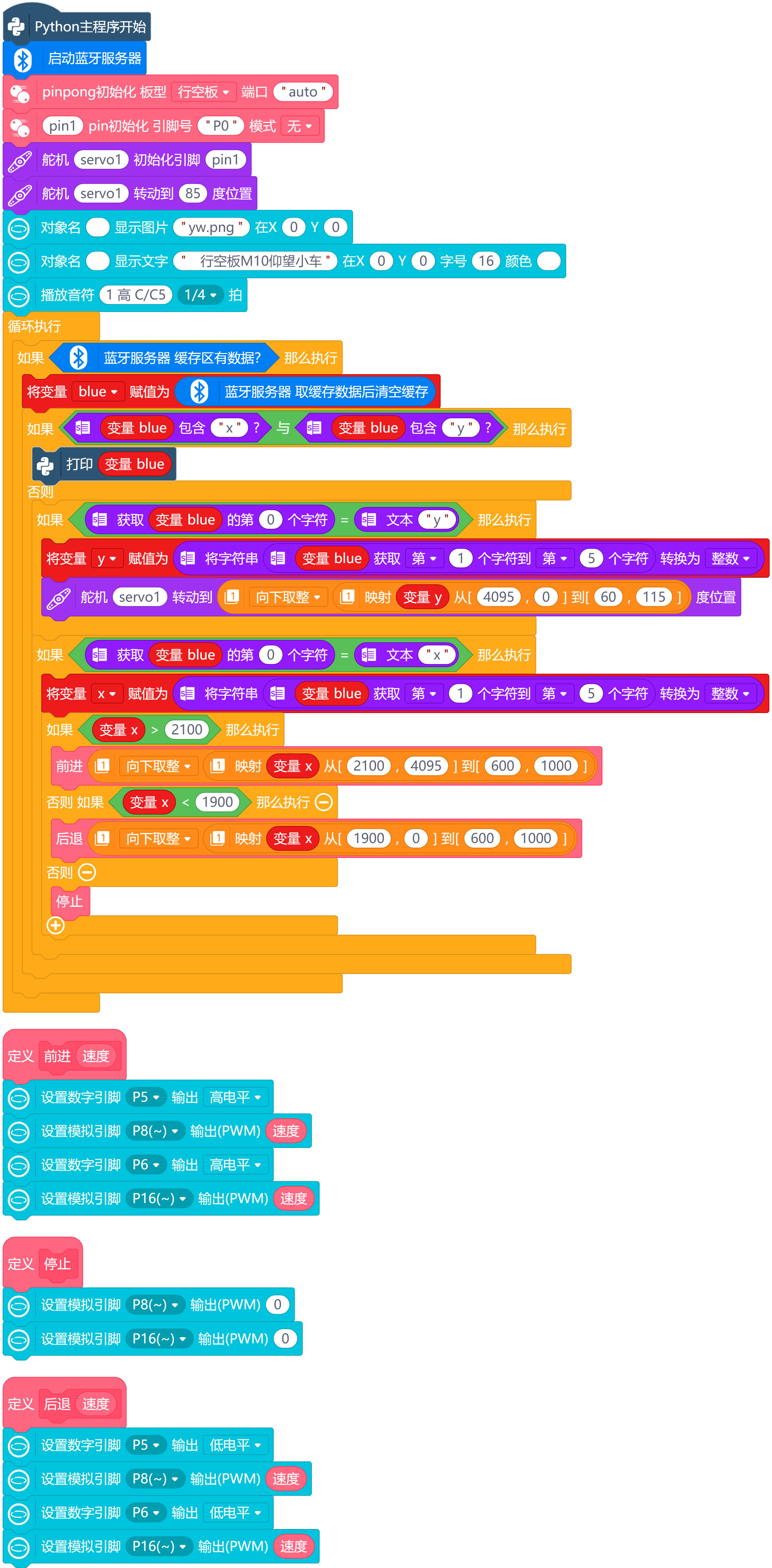
步骤3 M10小车(服务端)程序

小车方向舵机接P0。
左电机M1,右电机M2。
1、Mind+--Python模式--加载行空板。
2、加载相关库。


3、M10小车程序:
将收到的数据去除无效错误数据,再分组转化成数字处理成方向和速度控制数据。
y组数据映射到60-115,控制方向舵机。
x组数据分成三组,分别控制前进速度,后退速度、停止。
小结:
1、测试通过,效果基本上还算满意。
2、第一次用蓝牙传输控制数据,对蓝牙有了新的认识。
附件
附件


 他的勋章
他的勋章

罗罗罗2025.12.03
666