 返回首页
返回首页
 回到顶部
回到顶部
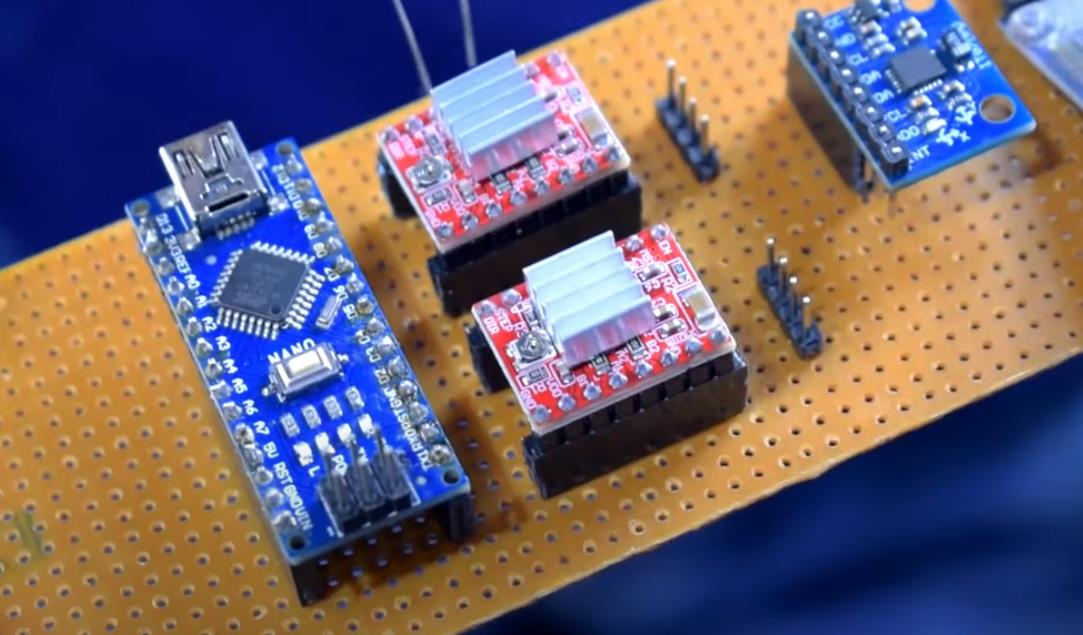
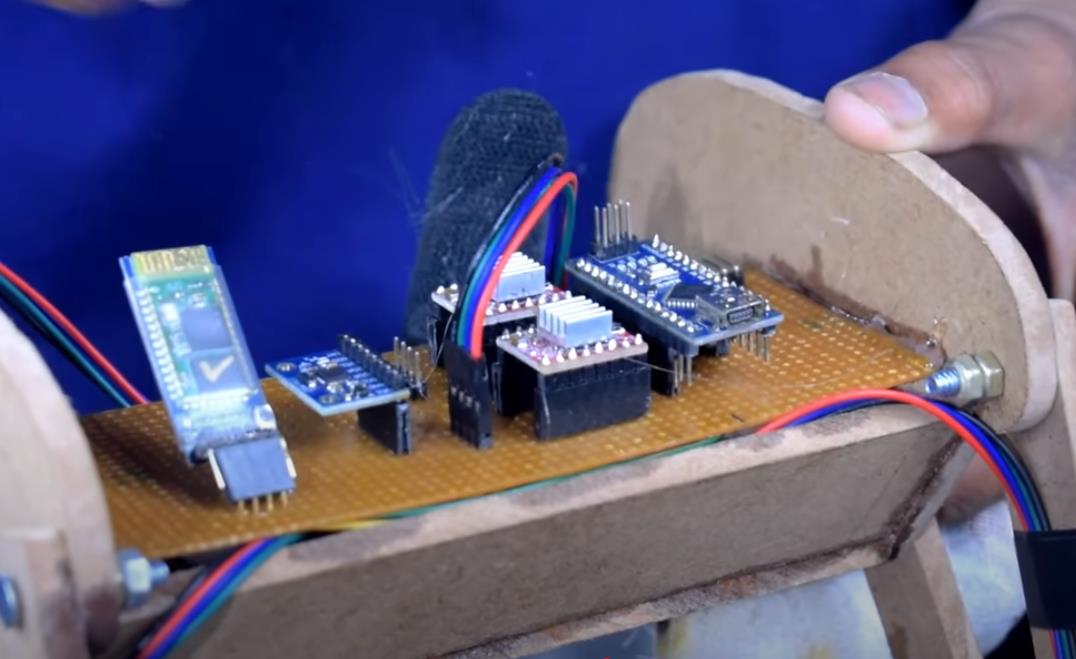
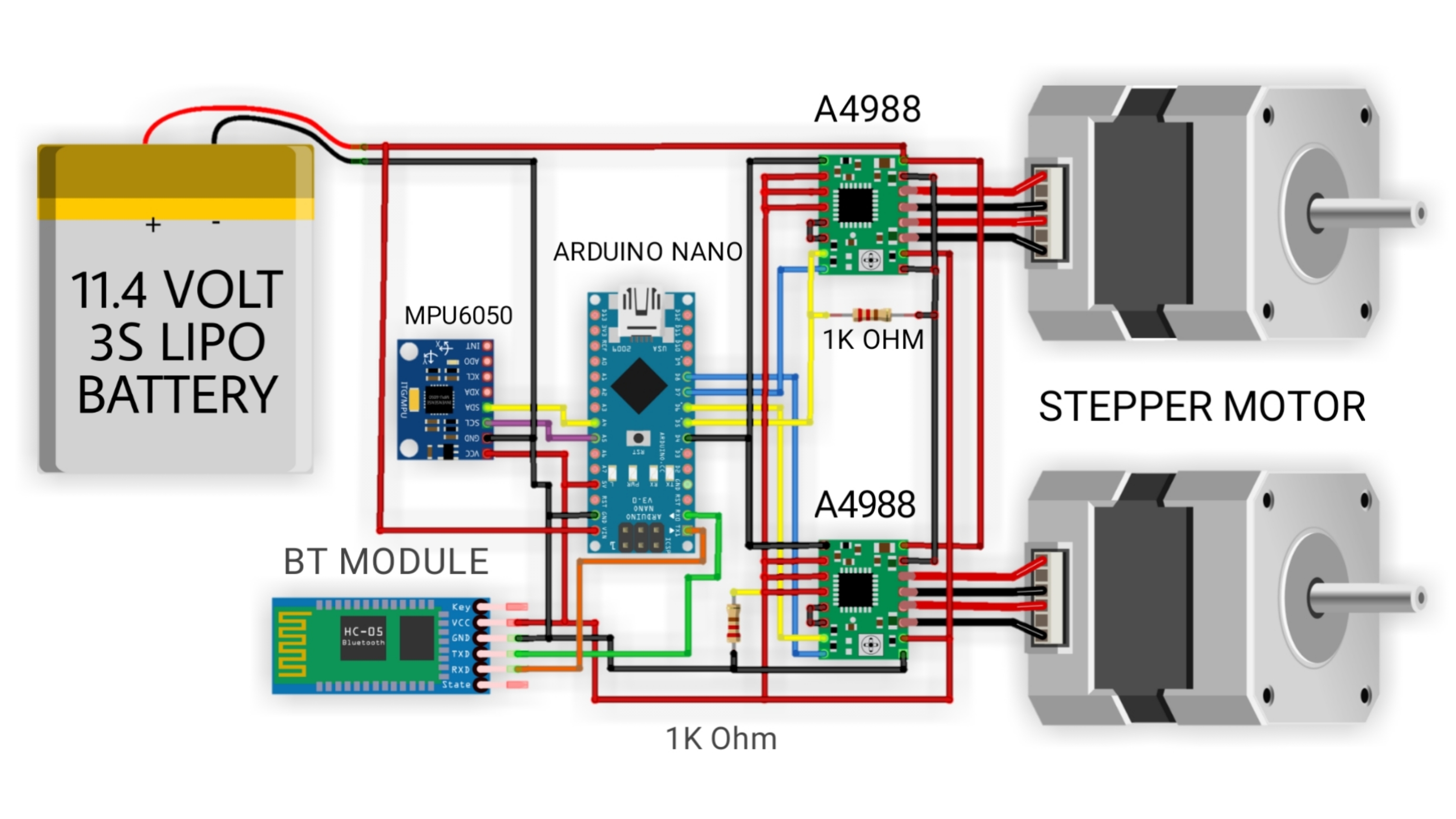
为了构建这个项目,我使用了 Arduino nano MPU6050 A4988 驱动程序 HC-05 bt 模块 MDF 板。Arduino Uno 也适用于这个自平衡机器人。
本项目使用 Balancingwii 固件和 EZ-GUI 安卓应用程序,通过蓝牙连接控制机器人。
这是 Arduino 的顶级项目,这是一个非常有趣的DIY。
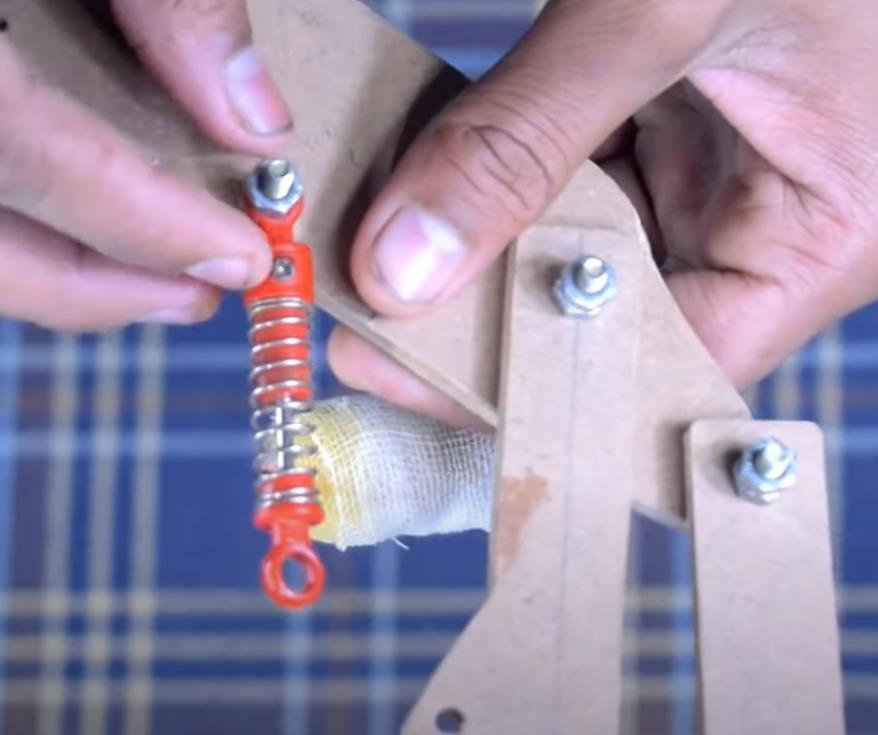
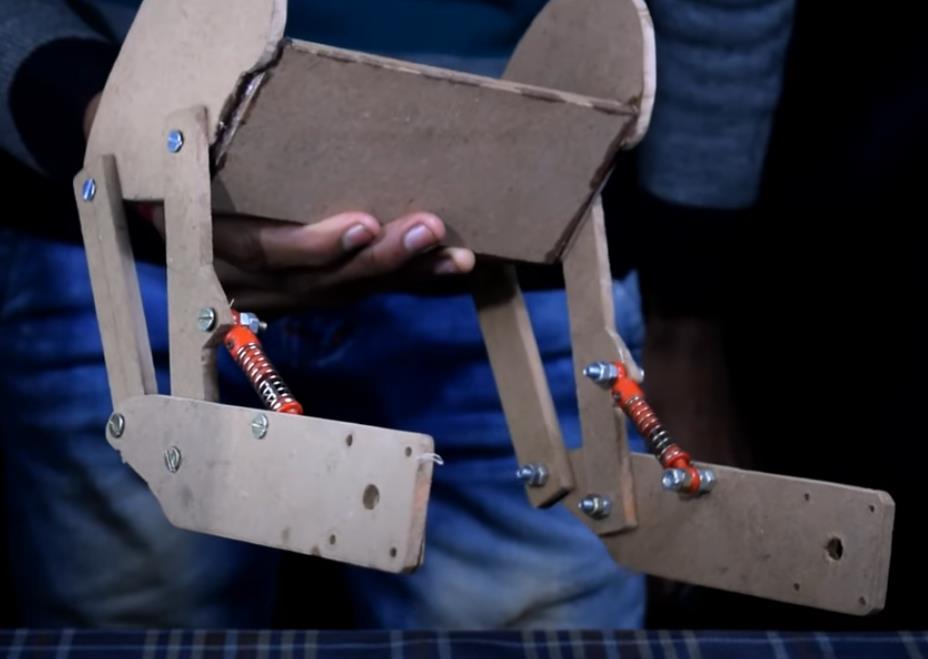
这是一个不会让自己掉下来的双腿机器人,在这里我使用 Nema 17 步进电机和 A4988 步进电机驱动器以及一些 Arduino 编程来平衡这个机器人。我还使用了陀螺仪传感器 (MPU6050),它可以连续地将机器人方向数据发送到控制器。步进电机对 mpu 6050 发送的数据做出反应,如果机器人在前面倒下,它会移动字,如果机器人向后倒下,它会向后移动字。
我们还可以借助智能手机向左、向右、向前和向后移动它通过蓝牙,这意味着它是蓝牙控制自平衡机器人。
使用的材料:)
亚马逊 [印度]:
2*NEMA 17 步进电机:
https://bit.ly/2tMplGh
2*10英寸轮:https://bit.ly/388MQZd Arduino Nano:https://bit.ly/2NfgzY3 HC-05
蓝牙模块:https://bit.ly/3a5AdzU 2*A4988
步进电机驱动器:https://bit.ly/37Q3fBw
MPU-6050:https://bit.ly/2R9KVMN
3S Lipo 电池:https://bit.ly/2tU3GMA Lipo
电池尼龙表带:https://bit.ly/2uHYThB
PCB/接头引脚:https://amzn.to/36NPanZ
2* 1K 欧姆电阻
2 *缓冲器:
螺母和螺栓
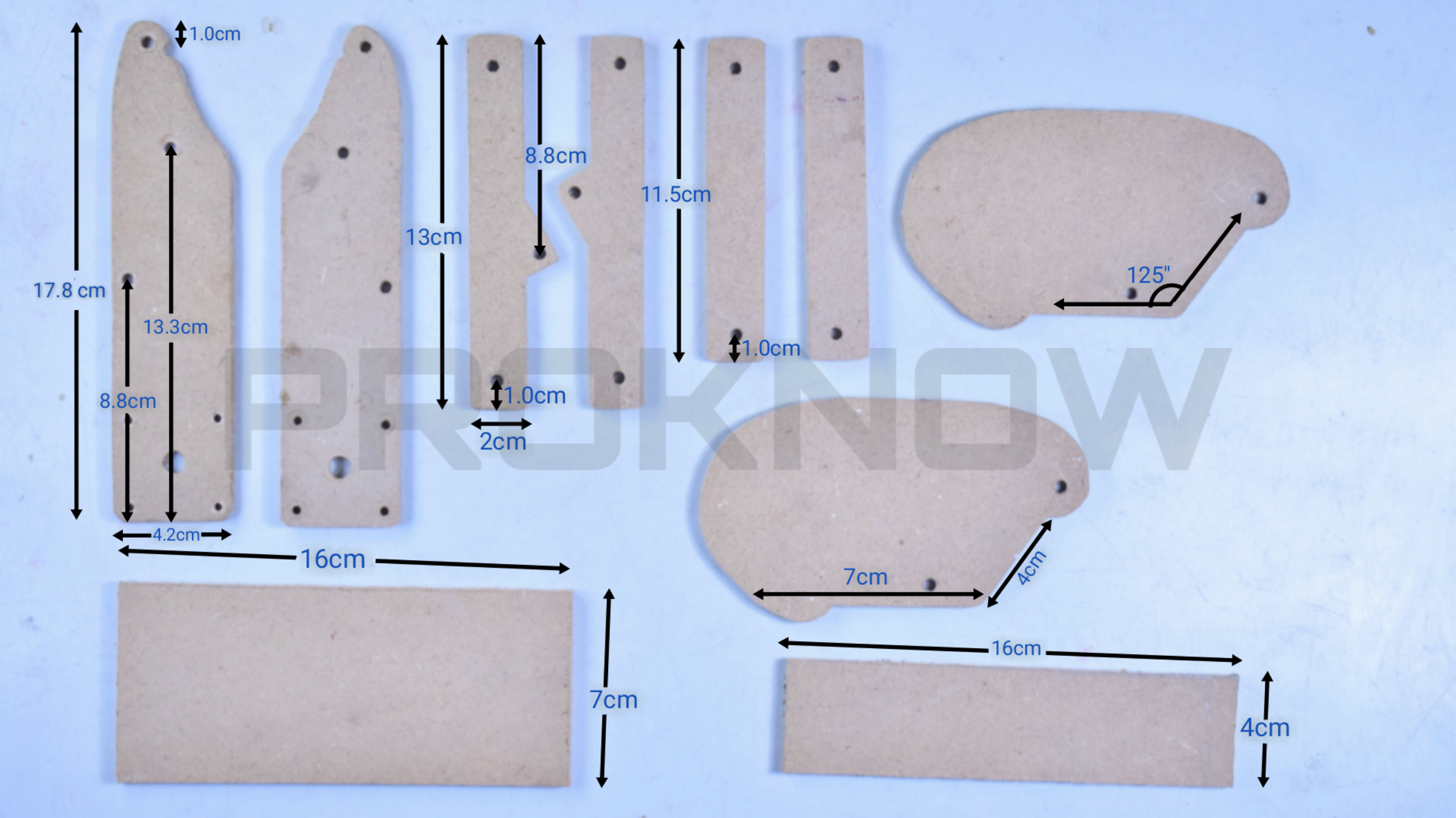
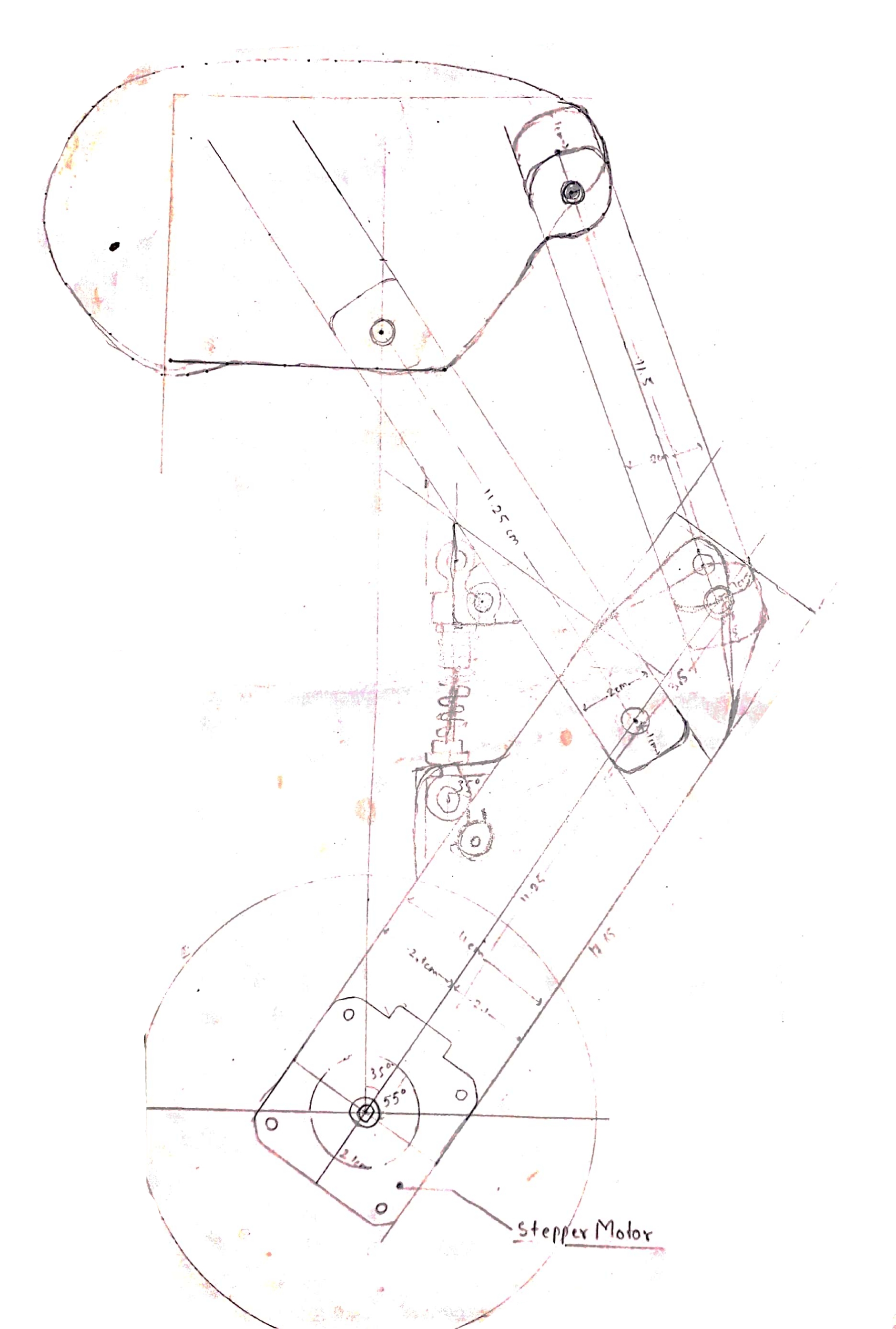
中 密度 纤维板







【Arduino 动手做】Arduino 的顶级项目:PROKNOW 自平衡机器人
项目链接:https://www.youtube.com/watch?v=DlsZUFGkmaQ&t=52s
项目作者:Pro Know
项目视频 :https://www.youtube.com/watch?v=DlsZUFGkmaQ&t=52s
项目代码:https://drive.google.com/drive/folders/1IL_9ZTxG5LcduEI_eXcrDRgDm0w1IleI


 他的勋章
他的勋章

评论