 返回首页
返回首页
 回到顶部
回到顶部
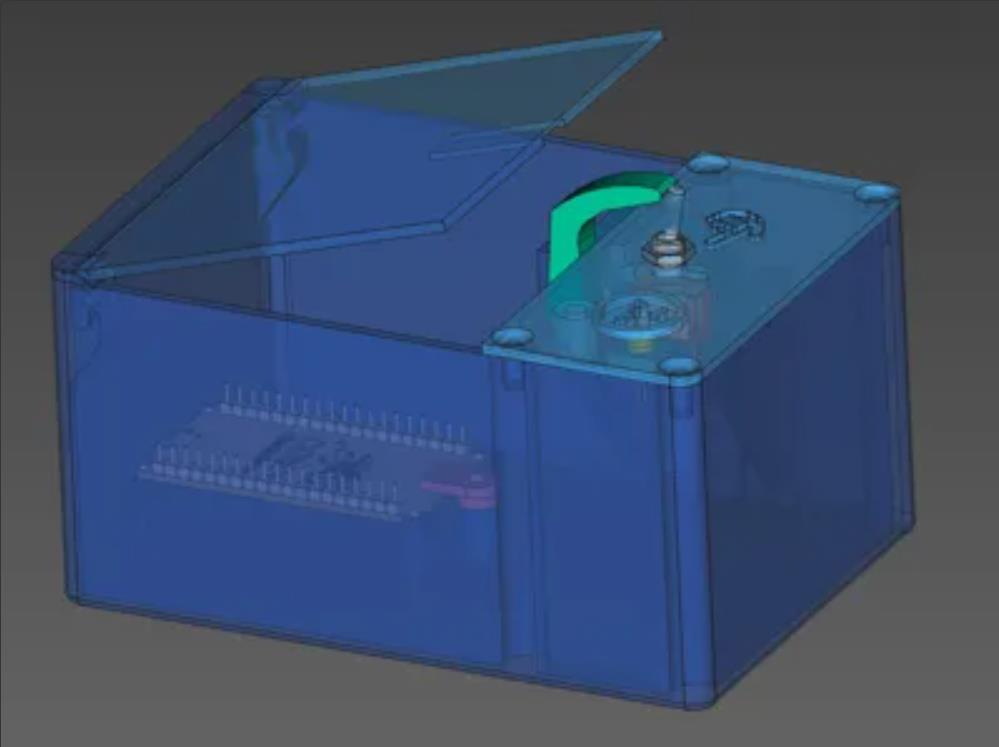
谁不想创建一个完全认证的无用箱呢?自从我在法戈看到一个之后,我当然想要一个 🙂
另外,我把它作为 ESP32 的一种“Hello world”练习。
看看它的实际效果:
你需要:
• 一个 ESP32
• 托管在 https://github.com/wiz78/UselessBox 的代码
• 一个 5mm LED
• 一个 220 欧姆电阻
• 一个小型 SPDT 杠杆开关
• 一个微型伺服电机(我使用的是 Miuzei MS18)
• 一些电线
• 4 个用于顶部滑盖的小型 M3 螺丝
• 2 个用于 ESP 阻挡器和 LED 支撑的长 M3 螺丝
• 一个 2A USB 电源 + 微型 USB 线
一些组装提示:
• 使用电阻连接 LED 到 GND 和 GPIO 引脚(例如 16)之间。
• 连接电机到另一个 GND 和不同的 GPIO(例如 18)。
• 连接开关到 GND 和 GPIO 引脚(例如 12)之间。
• 这些是代码中已定义的引脚,当然你可以更改它们。
• 该代码可以进行调整,以启用一个 HTTP 服务器来替换固件,还可以启用其他测试端点。其中一个特别有用,可以用来校准伺服电机组装后的位置:即 curl -o- -X POST http://uselessbox.local/servo?pos=80 - 你需要找到将代码中用于静止位置(臂在盖子下面)、偷看位置(臂部分抬高,打开盖子)和推压位置(足以将开关移到关闭位置)的值输入。
刷写 ESP32:
• 从 Github 下载代码。
• 将 wifi_config-dist.h 重命名为 wifi_config.h。
• 编辑 wifi_config.h 并插入你的 Wi-Fi 设置。
• 安装 Arduino IDE (https://www.arduino.cc/en/software)
• 为 ESP32 设置它(例如 https://medium.com/@pauljoegeorge/setup-arduino-ide-to-flash-a-project-to-esp32-34db014a7e65)
• 编译代码并将其上传到 ESP32。
• 在使用电机之前,将 ESP32 与电脑断开连接。
• 按照最后一个“组装提示”中的说明校准伺服电机。一旦你有了正确的要在 UselessBox.ino 的第 13-16 行中输入的值,重新编译并刷写 ESP32。





项目代码
#include <ezButton.h>
#include <ESP32Servo.h>
#define OTA_ENABLED 0
const int switchPin = 12;
const int ledPin = 16;
const int motorPin = 18;
ezButton topSwitch(switchPin);
Servo servo;
const int restingPos = 160;
const int peekingPos = 80;
const int intermediatePos = 60;
const int pushingPos = 41;
unsigned int lastActionMillis = 0;
bool firstAction = true;
bool ledOn = false;
void simple();
void slow();
void verySlow();
void slowPeek();
void angry();
void peeking();
typedef void (*actionHandler)();
const actionHandler actions[] = {
simple,
slow,
verySlow,
slowPeek,
angry,
peeking,
simple,
simple,
simple,
simple,
slowPeek,
peeking,
peeking,
angry,
angry,
angry,
};
constexpr int actionsCount = sizeof( actions ) / sizeof( actions[0] );
#if OTA_ENABLED
// based on https://randomnerdtutorials.com/esp32-over-the-air-ota-programming/
#include <WiFi.h>
#include <WiFiClient.h>
#include <WebServer.h>
#include <ESPmDNS.h>
#include <Update.h>
#include "wifi_config.h"
const char *host = "uselessBox";
const char *otaPage =
"<html>"
"<head>"
"<title>useless box OTA</title>"
"<script src='https://ajax.googleapis.com/ajax/libs/jquery/3.2.1/jquery.min.js'></script>"
"</head>"
"<body>"
"<form method='POST' action='#' enctype='multipart/form-data' id='upload_form'>"
"<input type='file' name='update'>"
"<input type='submit' value='Update'>"
"</form>"
"<div id='prg'>progress: 0%</div>"
"<script>"
"$('form').submit(function(e){"
"e.preventDefault();"
"var form = $('#upload_form')[0];"
"var data = new FormData(form);"
" $.ajax({"
"url: '/update',"
"type: 'POST',"
"data: data,"
"contentType: false,"
"processData:false,"
"xhr: function() {"
"var xhr = new window.XMLHttpRequest();"
"xhr.upload.addEventListener('progress', function(evt) {"
"if (evt.lengthComputable) {"
"var per = evt.loaded / evt.total;"
"$('#prg').html('progress: ' + Math.round(per*100) + '%');"
"}"
"}, false);"
"return xhr;"
"},"
"success:function(d, s) {"
"console.log('success!')"
"},"
"error: function (a, b, c) {"
"}"
"});"
"});"
"</script>"
"</body>"
"</html>";
WebServer server(80);
#endif
void setup()
{
#if OTA_ENABLED
Serial.begin(115200);
WiFi.begin(ssid, password);
for(int i = 0; ( i < 20 ) && ( WiFi.status() != WL_CONNECTED ); i++) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.print("Connected to ");
Serial.println(ssid);
Serial.print("IP address: ");
Serial.println(WiFi.localIP());
/*use mdns for host name resolution*/
if (!MDNS.begin(host)) {
Serial.println("Error setting up MDNS responder!");
}
server.on("/", HTTP_GET, []() {
server.sendHeader("Connection", "close");
server.send(200, "text/html", otaPage);
});
/*handling uploading firmware file */
server.on("/update", HTTP_POST, []() {
server.sendHeader("Connection", "close");
server.send(200, "text/plain", (Update.hasError()) ? "FAIL" : "OK");
ESP.restart();
}, []() {
HTTPUpload& upload = server.upload();
if (upload.status == UPLOAD_FILE_START) {
Serial.printf("Update: %s\n", upload.filename.c_str());
if (!Update.begin(UPDATE_SIZE_UNKNOWN)) { //start with max available size
Update.printError(Serial);
}
} else if (upload.status == UPLOAD_FILE_WRITE) {
/* flashing firmware to ESP*/
if (Update.write(upload.buf, upload.currentSize) != upload.currentSize) {
Update.printError(Serial);
}
} else if (upload.status == UPLOAD_FILE_END) {
if (Update.end(true)) { //true to set the size to the current progress
Serial.printf("Update Success: %u\nRebooting...\n", upload.totalSize);
} else {
Update.printError(Serial);
}
}
});
/* set servo position, useful to calibrate the motor */
server.on("/servo", HTTP_POST, []() {
server.sendHeader("Connection", "close");
server.send(200, "text/plain", "OK\n");
if(server.hasArg("pos")) {
servo.write(server.arg("pos").toInt());
delay(300);
}
});
server.on("/action", HTTP_POST, []() {
server.sendHeader("Connection", "close");
server.send(200, "text/plain", "OK\n");
if(server.hasArg("num")) {
int requestedAction = server.arg("num").toInt();
actions[ requestedAction % ( actionsCount + 1 ) ]();
} else if(server.hasArg("peek"))
peekAfterwards();
});
server.begin();
#endif
topSwitch.setDebounceTime(100);
pinMode(ledPin, OUTPUT);
setLed(false);
servo.setPeriodHertz(50);
servo.attach(motorPin);
servo.write(restingPos);
}
void loop()
{
#if OTA_ENABLED
server.handleClient();
#endif
topSwitch.loop();
if(topSwitch.getState() == LOW) {
int action, maxAction;
unsigned long sinceLastAction = millis() - lastActionMillis;
if(!lastActionMillis)
srandom(millis());
if(sinceLastAction > 60 * 5 * 1000)
firstAction = true;
if(firstAction)
action = 0;
else
action = random(0, actionsCount - 1);
actions[ action ]();
if(!firstAction && (sinceLastAction < 5000) && (random(1, 10) > 6))
peekAfterwards();
lastActionMillis = millis();
firstAction = false;
}
if(ledOn)
setLed(false);
delay(20);
}
int stepFromTo(int from, int to)
{
return (to > from) ? 1 : -1;
}
void simple()
{
servo.write(pushingPos);
delay(250);
servo.write(restingPos);
}
void slow()
{
for(int i = restingPos; i != pushingPos; i += stepFromTo(restingPos, pushingPos)) {
servo.write(i);
delay(10);
}
servo.write(intermediatePos);
delay(100);
servo.write(pushingPos);
delay(100);
servo.write(restingPos);
}
void verySlow()
{
for(int i = restingPos; i != pushingPos; i += stepFromTo(restingPos, pushingPos)) {
servo.write(i);
delay(30);
}
servo.write(intermediatePos);
delay(100);
servo.write(pushingPos);
delay(150);
servo.write(restingPos);
}
void slowPeek()
{
for(int i = restingPos; i != peekingPos; i += stepFromTo(restingPos, peekingPos)) {
servo.write(i);
delay(10);
}
servo.write(peekingPos);
delay(500);
servo.write(pushingPos);
delay(250);
servo.write(restingPos);
}
void angry()
{
setLed(true);
for(int i = 0; i < 3; i++) {
servo.write(pushingPos);
delay(250);
servo.write(peekingPos);
delay(200);
}
servo.write(restingPos);
delay(200);
}
void peeking()
{
servo.write(peekingPos);
setLed(true);
delay(250);
servo.write(pushingPos);
delay(250);
servo.write(restingPos);
delay(200);
}
void peekAfterwards()
{
setLed(true);
delay(100);
servo.write(peekingPos);
delay(1500);
servo.write(restingPos);
}
void setLed(bool on)
{
digitalWrite(ledPin, on ? HIGH : LOW);
ledOn = on;
}【Arduino 动手做】ESP32 的“Hello world”练习:无聊盒子
【Arduino 动手做】ESP32 的一种“Hello world”练习:无聊盒子
项目链接:https://makerworld.com/zh/models/76853
项目作者:Wiz_78
项目代码:https://github.com/wiz78/UselessBox
3D 文件:https://makerworld.com/zh/models/76853-useless-box#profileId-81310
升级手臂:https://makerworld.com/zh/models/737831-modified-arm-for-useless-box#profileId-669999
带更强的铰链: https://makerworld.com/zh/models/525764-useless-box-flap-with-stronger-hinge#profileId-442597


 他的勋章
他的勋章

评论