 返回首页
返回首页
 回到顶部
回到顶部
5.31 小兩 端午

M10端午龙舟奇妙游的第三站,来到了和掌控板的UDP通信。
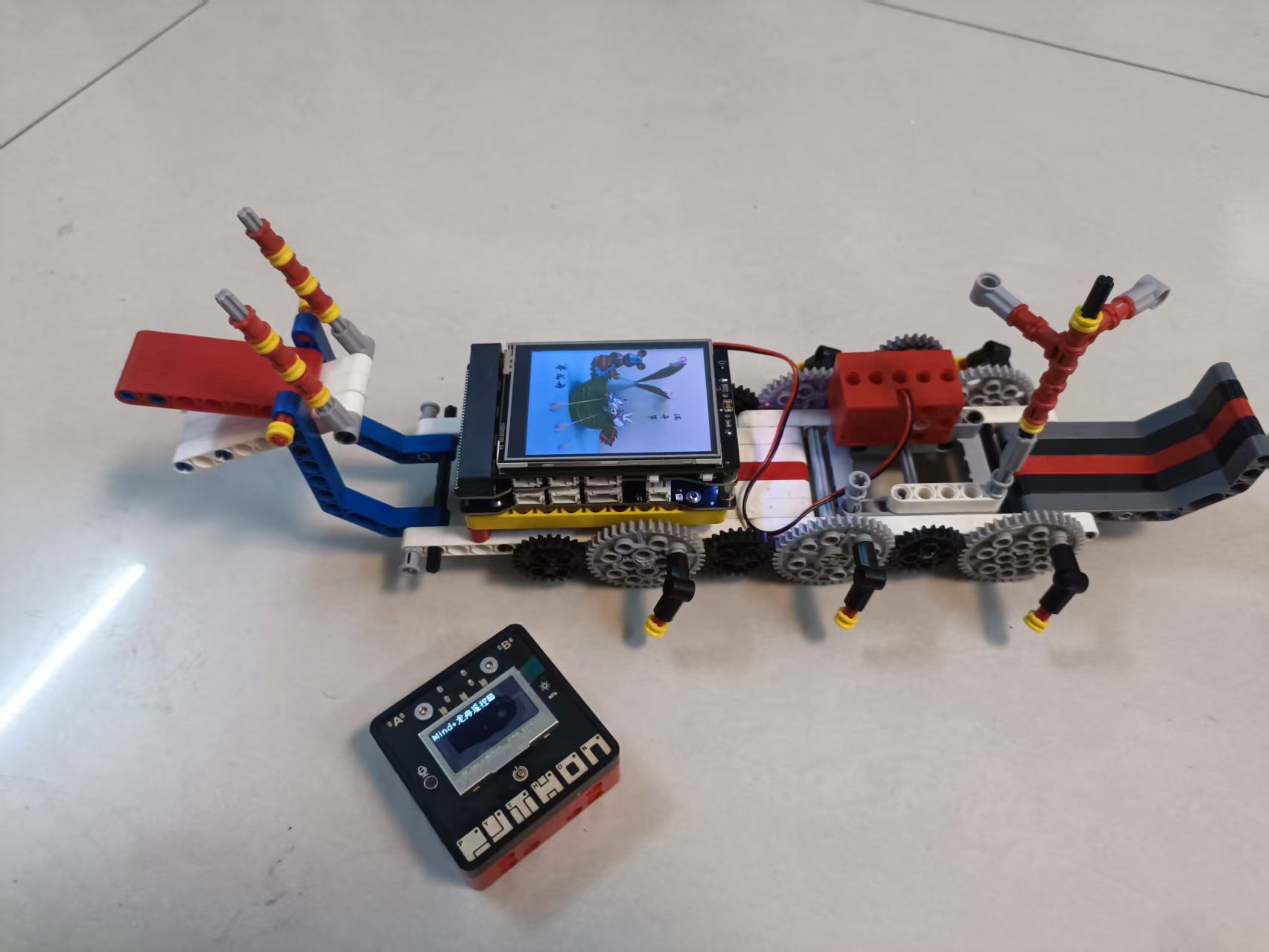
在这个帖子中,我将尝试用乐动掌控和M10通信,再用掌控板的前后倾斜来控制龙舟的运动。
任务目标:
1、M10开启热点,做UDP服务器,接收掌控板客户端发来的消息,执行相应动作。
2、掌控板接入M10热点,做UDP服务端,向M10发送消息,控制龙舟运动。
材料清单
- M10 X1
- 扩展板组合 X1
- 乐高龙舟 X1
- 乐动掌控 X1
步骤1 复习UDP
因为我对UDP不熟悉,所以这个帖子继续巩固它。
注意,设置相同的端口。
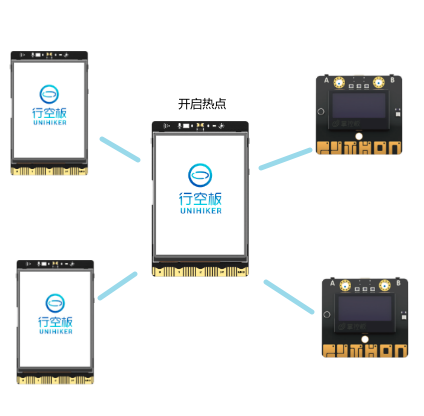
在本实验中,龙舟上的M10做服务器,它要开启热点,让掌控板遥控器接入,两者形成一个局域网。
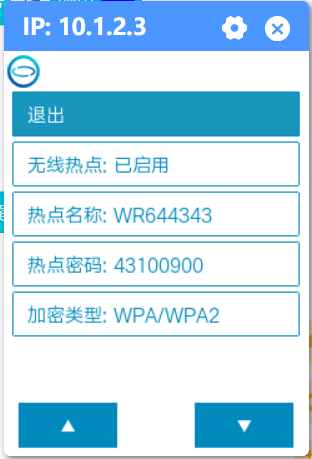
我的M10开启热点后,IP地址和热点名称密码如下:

步骤2 编程与调试
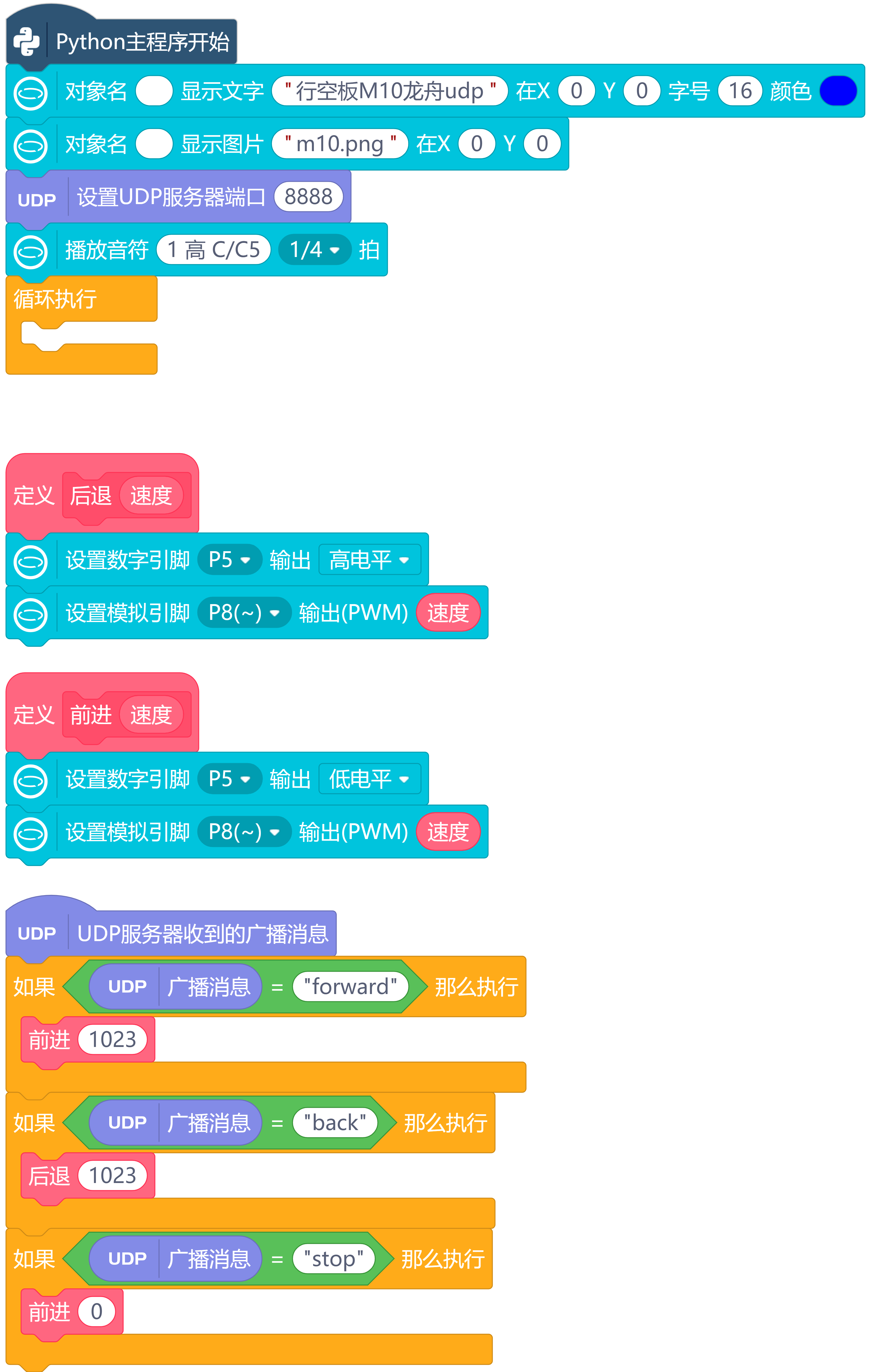
龙舟M10端,Udp服务器:

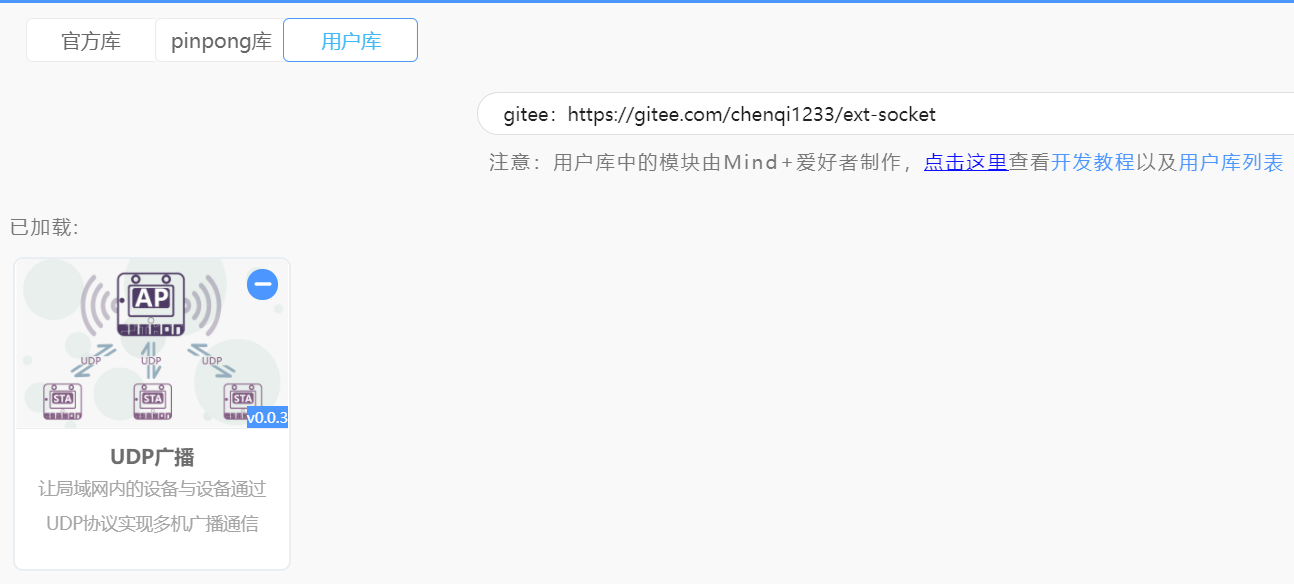
“扩展”中选择“用户库”:
- 直接加复制链接,gitee:https://gitee.com/chenqi1233/ext-socket
程序
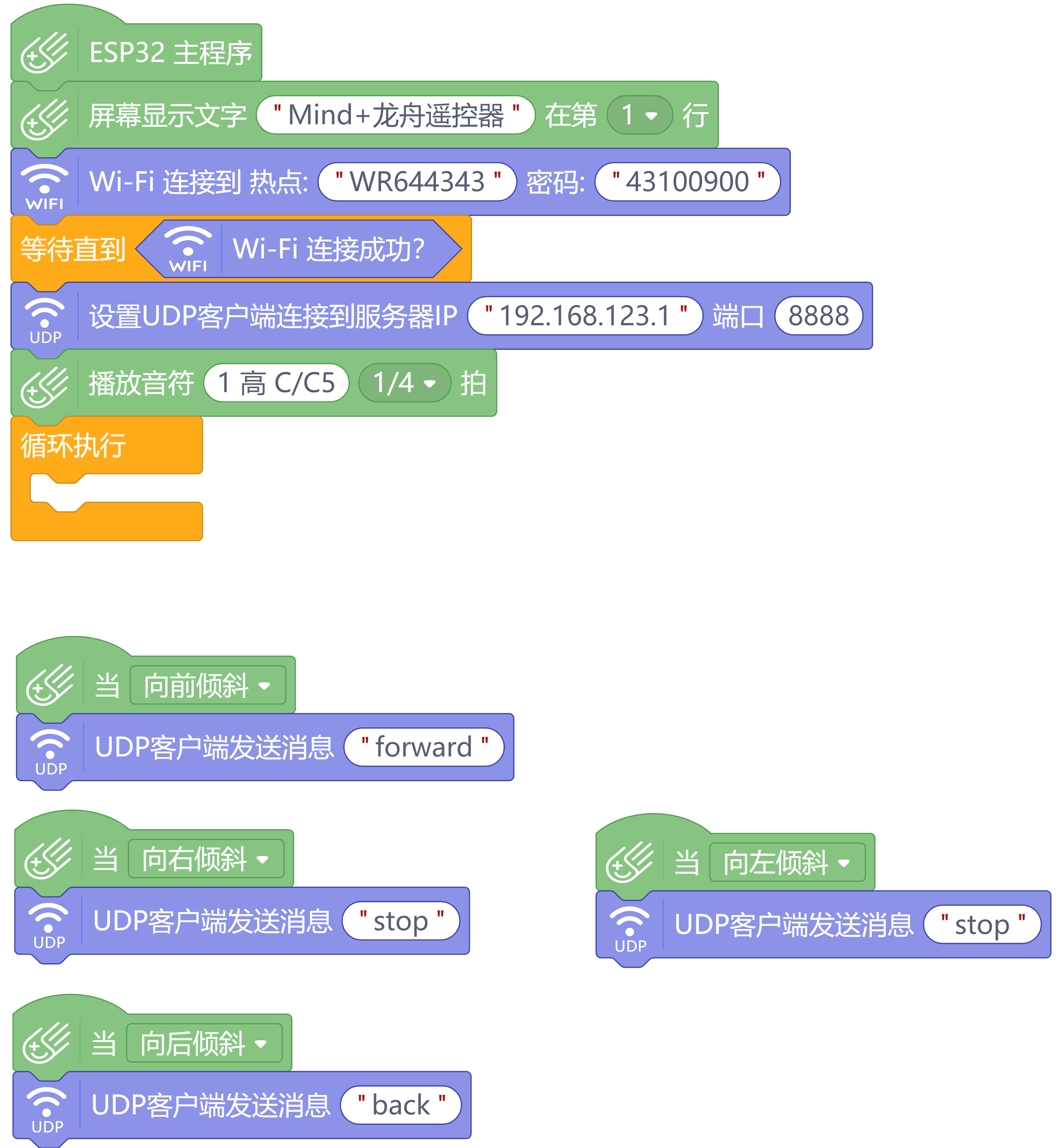
乐动掌控遥控端,UDP客户端:


注意设置相同的端口。
测试通过。
附件
附件


 他的勋章
他的勋章

评论