 返回首页
返回首页
 回到顶部
回到顶部

一、项目背景
随着智能驾驶技术的普及,自适应巡航控制系统(Adaptive Cruise Control, ACC)已成为现代汽车的重要功能,它能够根据前方车辆的速度自动调整车速,提升驾驶安全性和舒适性。本项目在义务教育信息科技指南六年级一册中,有关于定速巡航的控制,刚好想尝试用语音控制小麦昆,因此就拿此课做一个试验,整体效果还不错,k10真的很强大!!!

二、项目功能
自适应巡航控制
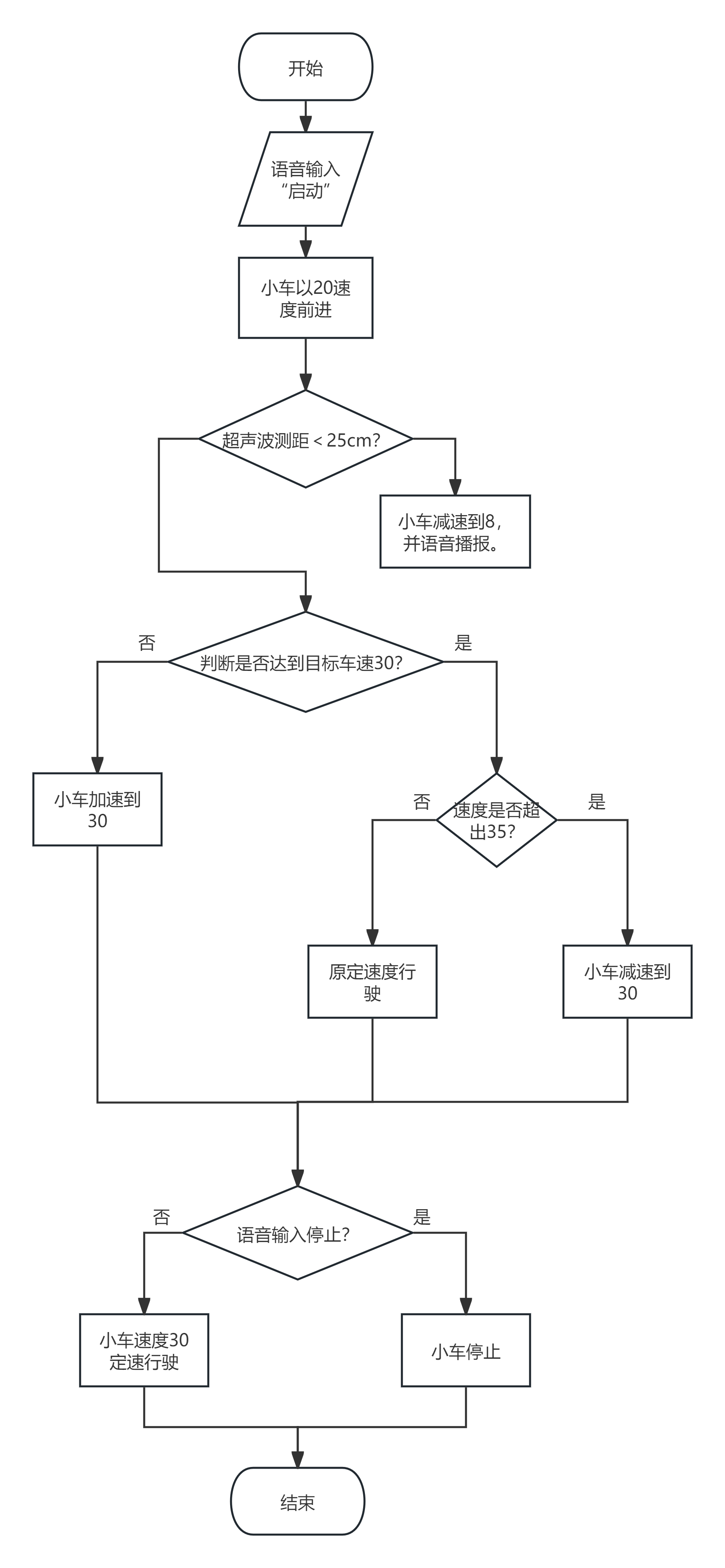
设定初始速度阈值(如30 km/h),小车自动保持匀速行驶。
超声波传感器实时检测前方障碍物距离(25cm内),若前方车辆速度低于设定阈值,自动减速至安全速度。
语音控制
通过行空板K10的离线语音识别功能,支持“加速”“减速”“启动/停止”等语音指令。
人脸识别启动(未实现,加载人脸识别积木行空板就白屏,后续继续验证错误原因)
使用板载摄像头进行人脸识别验证,仅授权用户可启动小车,增强安全性。
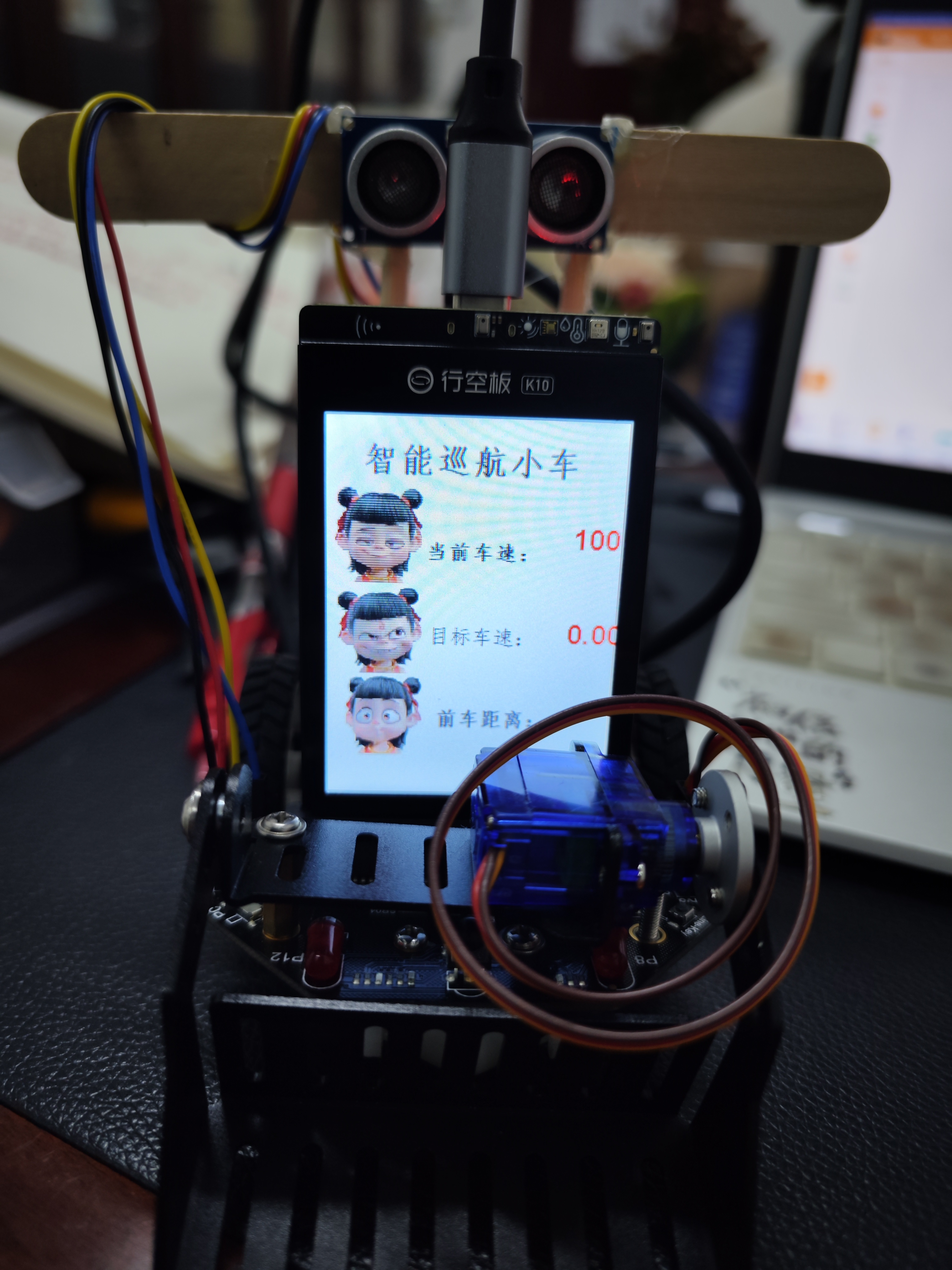
实时数据反馈
2.8寸彩色屏幕显示当前车速、目标速度及前方障碍物距离。
三、项目使用器材
| 器材名称 | 功能描述 |
|---|---|
| 行空板K10 | 主控板,集成摄像头、语音模块、WiFi/蓝牙、屏幕,支持MicroPython编程26。 |
| 超声波传感器 | 检测前方障碍物距离(25cm范围)。 |
| 麦昆小车 | 驱动车轮,实现速度控制。(非plus版) |
| 舵机与铲子 | 未使用,因未找到螺丝刀,便未取下。 |
四、项目制作过程
1. 软件、硬件组装
下载行空板K10公测版Mind+压缩包:
· 网页下载(20250103版):点击下载
· 百度网盘下载(20250103版): https://pan.baidu.com/s/15ORx5VbobeZjiQvOxar21g?pwd=d2aa 提取码: d2aa
· 夸克网盘下载(20250103版): https://pan.quark.cn/s/db00cf6ae510
· 将压缩包解压,注意解压过程中关闭杀毒软件,解压后文件夹路径不含中文,解压后文件夹路径不易过长。
· 若编译任何代码都报错,请查看:公测版解压问题
将行空板K10与电机驱动模块、超声波传感器、舵机连接。
固定超声波传感器于小车前端,由于k10的超声波模块只能接p0,p1口,因此将超声波直接拿木棍垫高了一下。
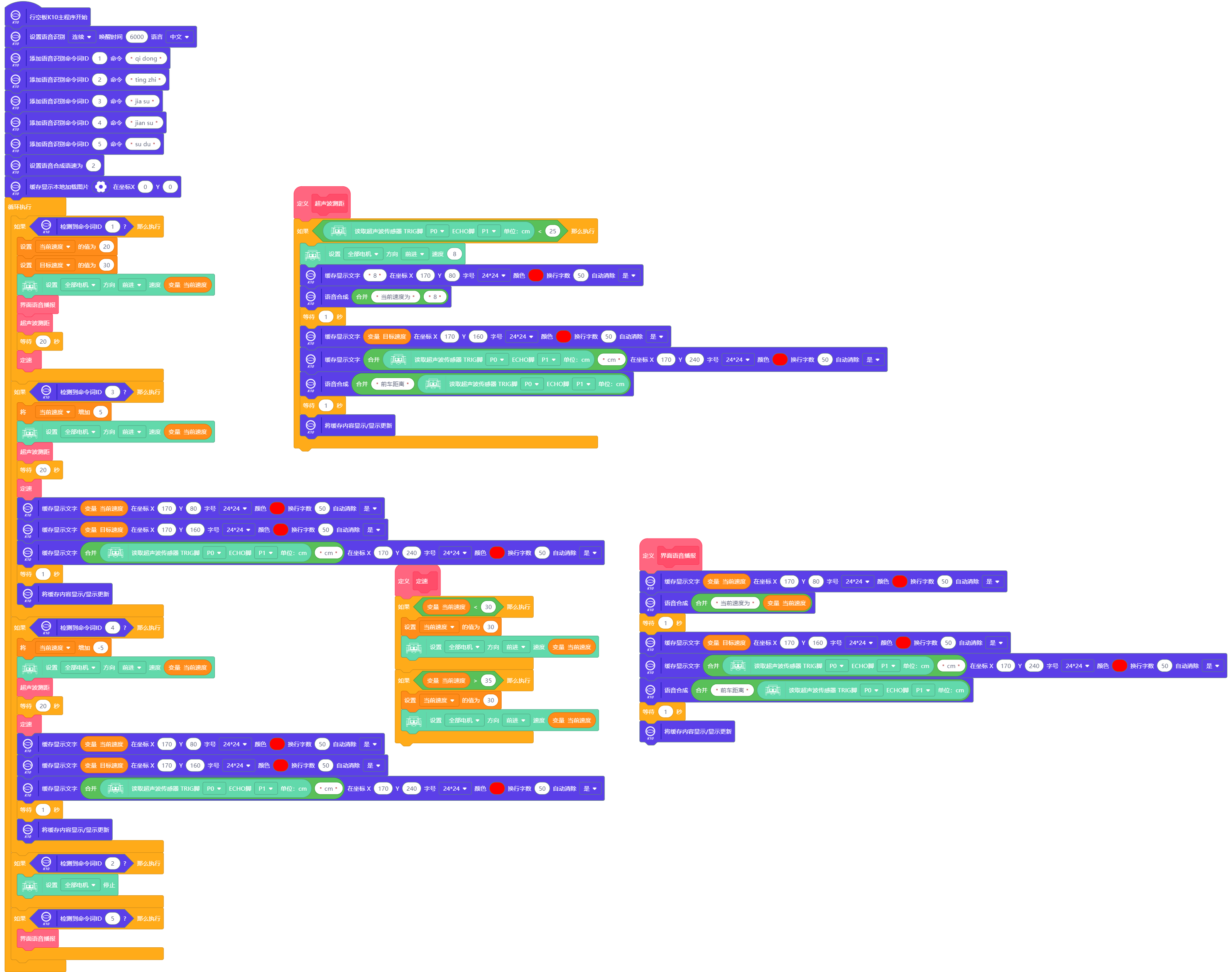
2. 传感器配置与编程
超声波测距:通过编写测距逻辑,实时获取前方障碍物距离。
语音交互:调用行空板K10的离线语音库,定义“加速”“减速”等关键词。
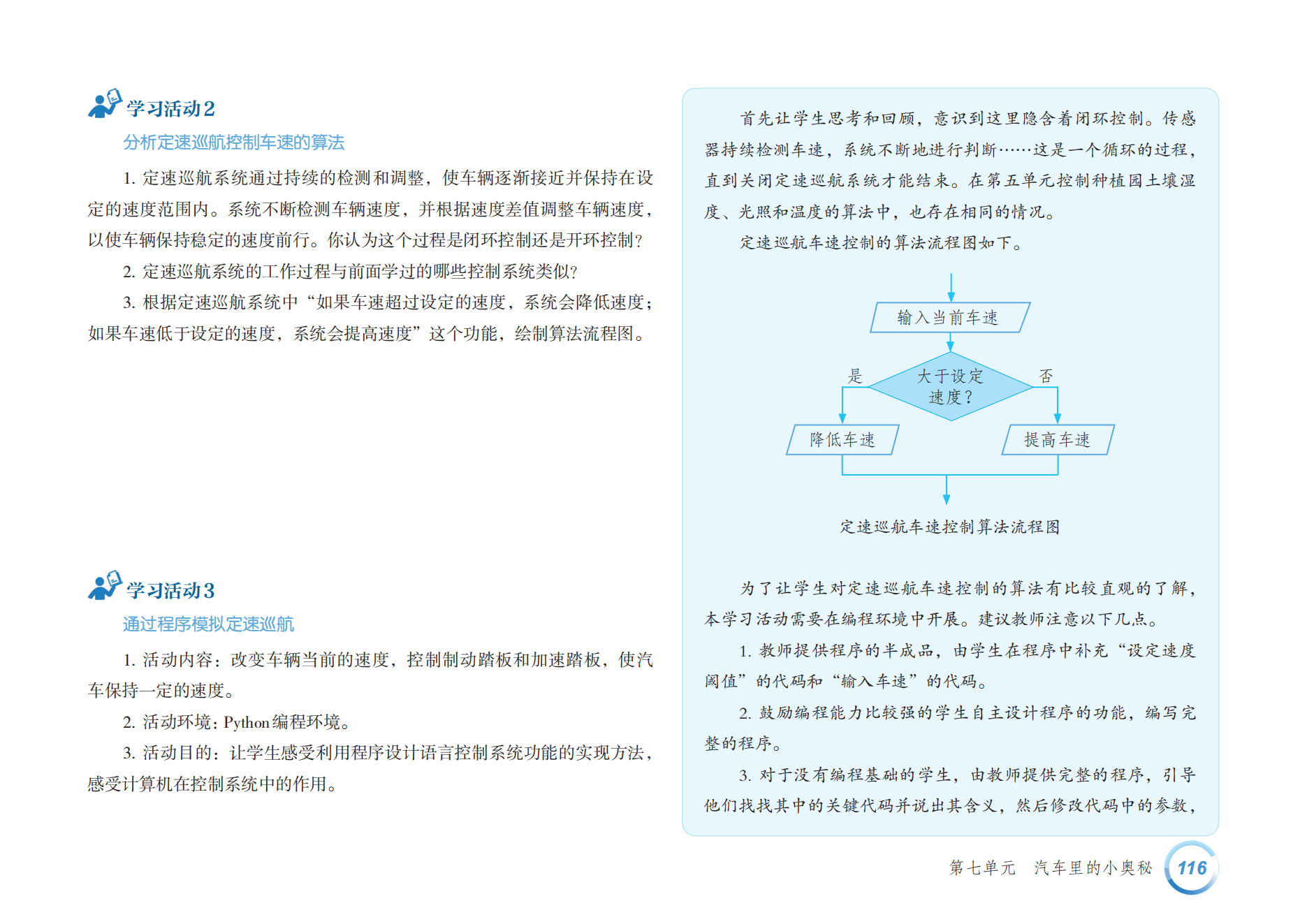
3. 自适应巡航算法
设定速度阈值,结合超声波数据动态调整电机转速
4. 界面与数据展示
通过行空板K10的2.8寸屏幕,显示实时车速、目标速度及障碍物距离。
五、流程图
六、结语
本项目通过结合行空板K10的AI功能与传感器技术,实现了智能自适应巡航的核心逻辑。学生不仅能掌握硬件连接、编程调试等技能,还能深入理解交通安全与人工智能的融合应用。(视频还在审核中,后续放上来)


 他的勋章
他的勋章
张鸣0072025.03.25
您好 程序能分享一下嘛 怎么才能联系到您呢