 返回首页
返回首页
 回到顶部
回到顶部
1.30 阴
初二,阴天,写作业。
年三十去约了票去参观贾湖遗址博物,博物馆却是闭馆,在遗址公园和贾湖村转了转。


大年初一,河南博物院,看到了出自贾湖遗址的国宝级文物--贾湖骨笛(8000前的乐器)和刻符龟甲(上面有最早的文字雏形)。

中华文明,源渊流长。
今天的任务是记录我写的遥控装载机-运花生2程序优化版,目的是用较少的无线消息通信量,高效的完成遥控任务。在上一版中消息的量有些大,当然加上延时0.1秒之后好很多,不加延时就是错误的写法。
我问了DeepSeek,它写了一个参考程序:

提供了一个常规的和大家常想到的写法。
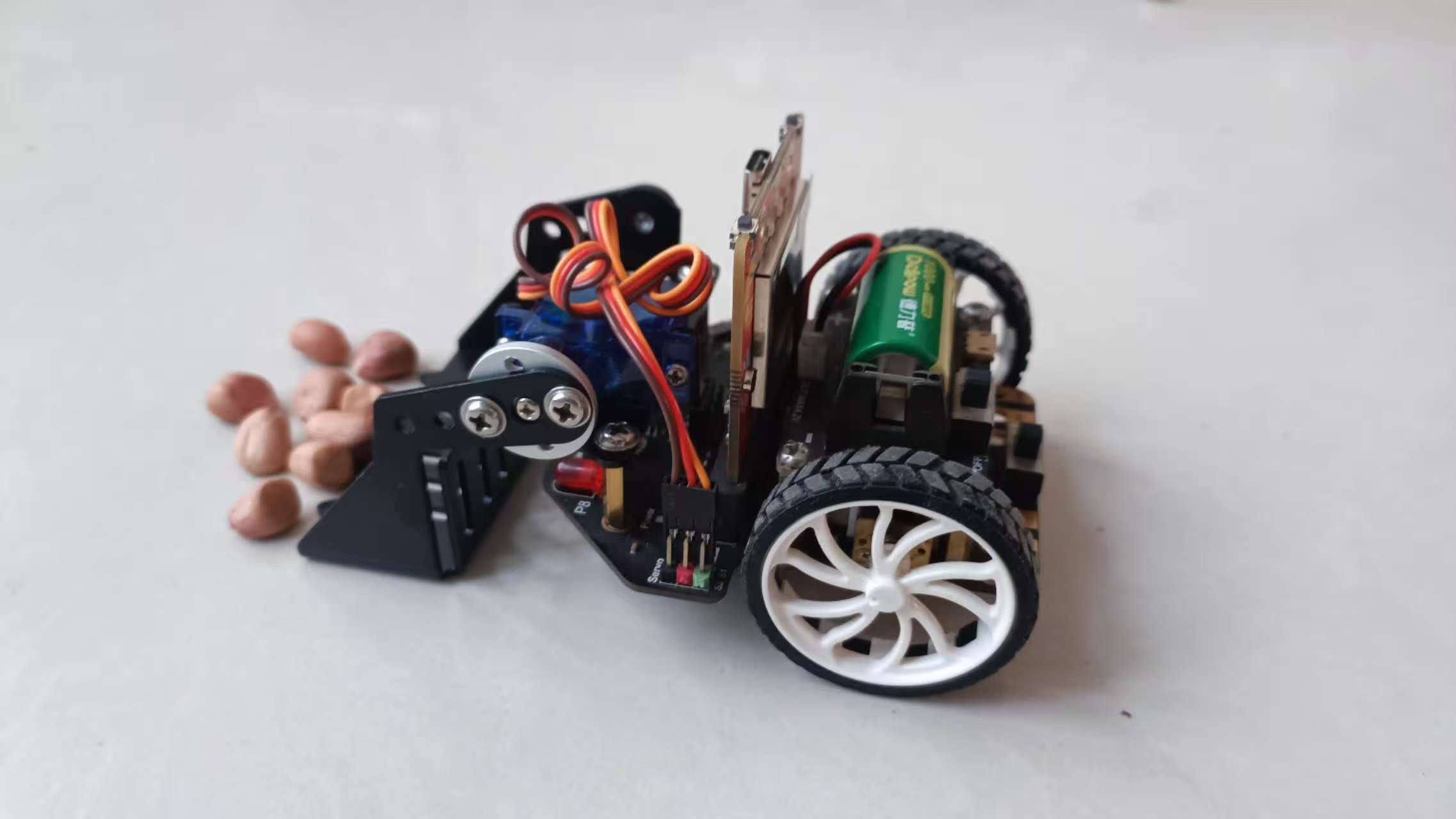
材料清单
- 麦昆小车 X1
- 掌控板 X2
- N+扩展板 X1
- 装载机配件 X1
遥控器程序的优化,重点是解决在停止状态时继续大量消息的发送,这样在进行舵机遥控装载动作时就可以心无旁骛的操作了。

这里我建立了以上几个变量。

x1 x2 y1 y2存入X轴Y轴的摇杆值,过一会要用x2-x1,y2-y1来表示摇杆的回中动作。
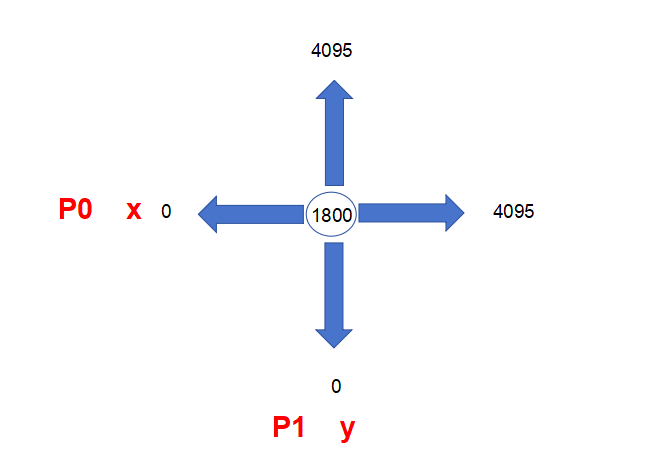
小车前进、后退、左转、右转的消息发送仍然用常规方法,当摇杆推向相应的方向,超过设定的阀值后发送命令。

下面是从四个方向上回中动作的判定,这时只发送一次广播消息。

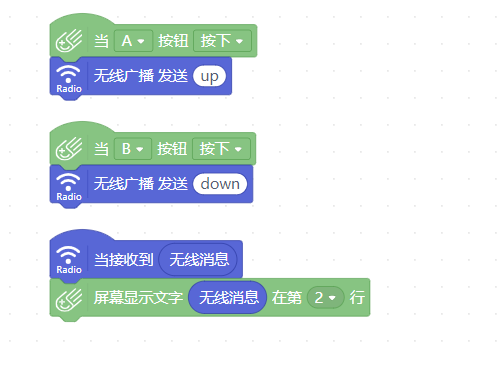
按A,发送铲子抬起的消息。
按B,发送铲子放下的消息。
麦昆装载机的程序:
无线广播,频道13。舵机设置为铲子抬起。
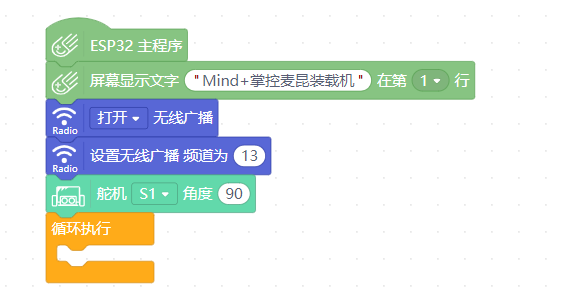
收到铲取和放下命令执行的动作。将收到的消息发回,让遥控器屏幕显示。
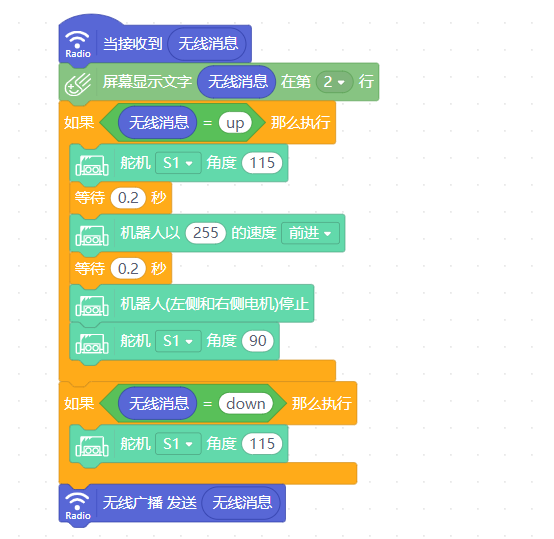
收到前进、后退、左转、右转、停止命令执行的动作。

小结:
这个作业写完了,其实还有不足之处,如果增加一些转向的微调,能让装载机更容易瞄准花生,就更好了。
希望在下一个小叉车的项目中能有改进。
附件
附件


 他的勋章
他的勋章

评论