 返回首页
返回首页
 回到顶部
回到顶部
1.26 晴天 冷
2025开年,好多好消息啊。虽然不懂,感觉好牛XXX。

中国的胸怀与气魄之大,真不是灯塔国能学的了的。
天晴了,却很冷,继续探索。
今天的任务是给掌控麦昆装载机做一个遥控出来,然后写程序来控制它运花生,用无线广播的高时效来解决装载机动作迟顿的问题。
手里掌控板多,就用掌控板+N+扩展板来做遥控器了。
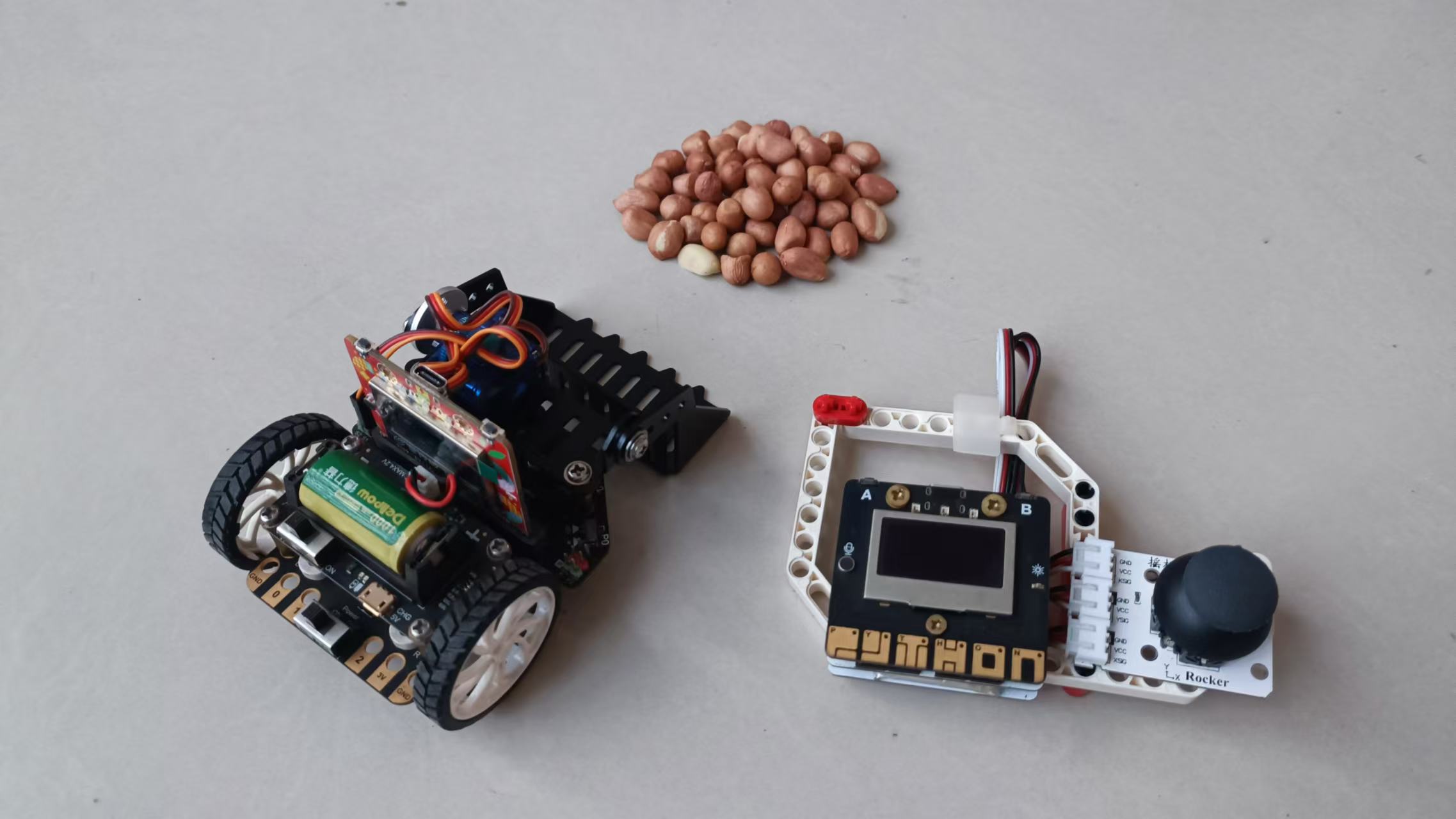
材料清单
- 掌控板 X1
- N+扩展板 X1
- 小麦昆 X1
- 装载机配件 X1
- 摇杆模块 X1
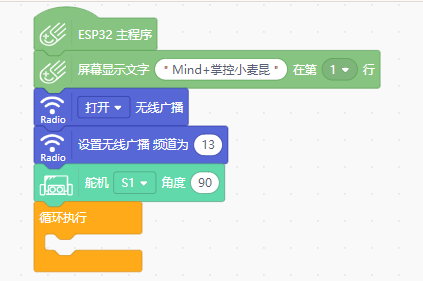
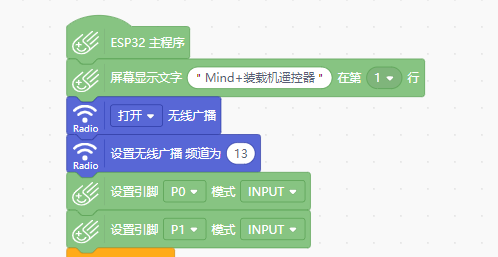
组装装载机和遥控器完毕,开始写程序。
麦昆装载机的程序上一个作业就完成了,这里只是稍稍优化了一下转向部分。


 无线广播,频道13,舵机90度,铲子举高高。
无线广播,频道13,舵机90度,铲子举高高。
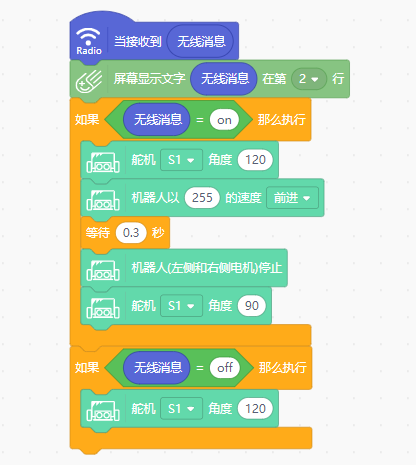
前进、后退、左转、右转、停止的消息约定。

装载和放下铲子的动作与消息约定。这里要注意的是,舵机控制不能用当接收到特定消息积木(别问我怎么知道)。
附件
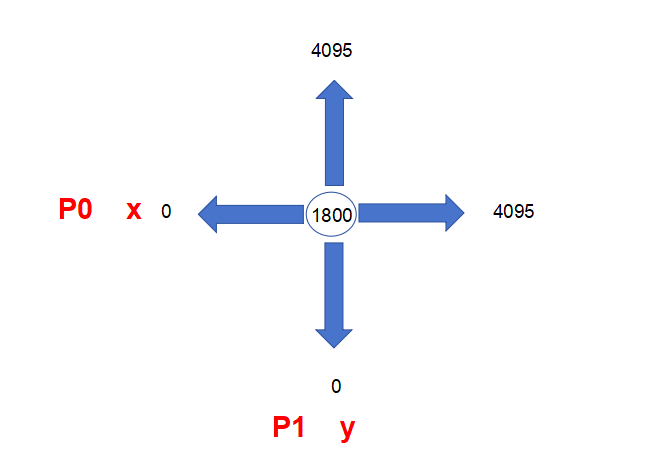
遥控器由掌控板+N+扩展板+摇杆模块组成,摇杆的X向模拟输入接P0,Y向模拟输入接P1,(按下数字输入接P2,这里没有用,有的摇杆只产生有XY向模拟数据)。
用串口读了一下数据,记录如下:
程序编写,无线广播,频道13。
摇杆用来控制装载机的前进、后退、左转、右转、停止,掌控板A键来控制铲一下,B键放平铲斗,这里放了一个等待直到……积木来控制消息只发一次。
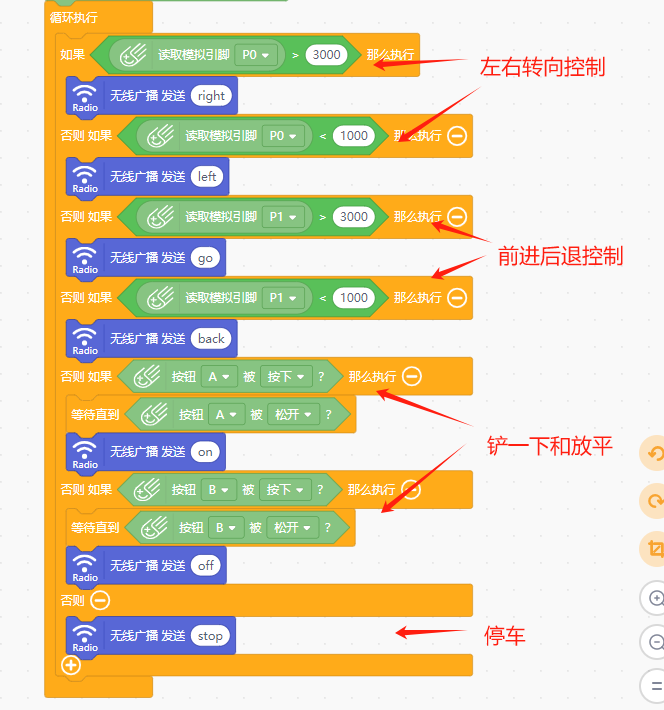
上面循环中要加一个延时0.1秒,缓解消息拥堵。
小结:
虽然用了人工,没有智能,但是装载机的控制确实精准多了,请大家看麦昆装载机运花生的表现吧。
1.27
后记:遥控的程序其实是不满意的,主要在于stop这个消息的发送,因为只有一个通信频道,我们要有效且高效的使用它。上面的遥控程序中会在否则的情况下不停无线广播发送stop消息占用了信道资源,使信道拥堵,其它的有效消息在接收时会被影响,有时会造成较大的延迟。
所以在后面的时间里会考虑优化一下。
附件


 他的勋章
他的勋章

评论