 返回首页
返回首页
 回到顶部
回到顶部
Arduino是一个开放源码的电子原型平台,它可以让你用简单的硬件和软件来创建各种互动的项目。Arduino的核心是一个微控制器板,它可以通过一系列的引脚来连接各种传感器、执行器、显示器等外部设备。Arduino的编程是基于C/C++语言的,你可以使用Arduino IDE(集成开发环境)来编写、编译和上传代码到Arduino板上。Arduino还有一个丰富的库和社区,你可以利用它们来扩展Arduino的功能和学习Arduino的知识。
Arduino的特点是:
1、开放源码:Arduino的硬件和软件都是开放源码的,你可以自由地修改、复制和分享它们。
2、易用:Arduino的硬件和软件都是为初学者和非专业人士设计的,你可以轻松地上手和使用它们。
3、便宜:Arduino的硬件和软件都是非常经济的,你可以用很低的成本来实现你的想法。
4、多样:Arduino有多种型号和版本,你可以根据你的需要和喜好来选择合适的Arduino板。
5、创新:Arduino可以让你用电子的方式来表达你的创意和想象,你可以用Arduino来制作各种有趣和有用的项目,如机器人、智能家居、艺术装置等。

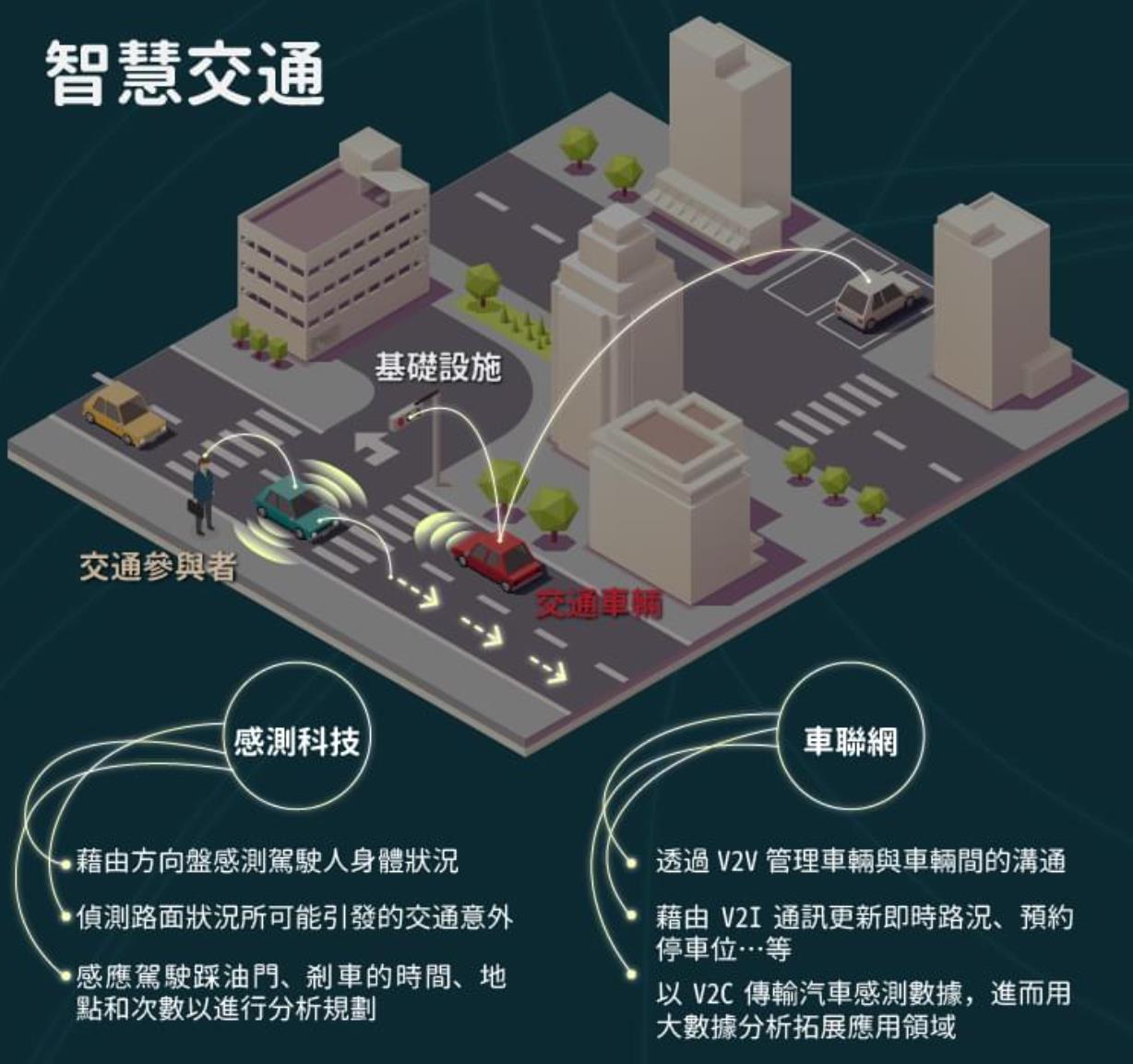
Arduino智慧交通是一种基于Arduino技术的智能交通系统,旨在提供交通管理和优化方案。下面将详细解释其主要特点、应用场景以及需要注意的事项。
主要特点:
1、实时数据采集和处理功能:系统可以通过连接传感器和Arduino控制器,实时采集交通相关数据,如交通流量、车辆速度、道路状态等。通过数据处理和分析,可以生成实时的交通信息和统计数据。
2、智能交通控制和优化功能:系统可以根据采集到的数据,实现智能的交通控制和优化。通过控制信号灯、调整道路限速、优化车辆流量等方式,改善交通拥堵、提高交通效率。
3、交通事故预警和安全管理功能:系统可以通过数据分析和模式识别,实现交通事故的预警和安全管理。一旦检测到异常情况,如交通事故风险区域、超速行驶等,可以及时发出警报并采取相应的安全措施。
4、用户信息服务和智能导航功能:系统可以向用户提供实时的交通信息服务和智能导航功能。通过连接到移动设备或车载导航系统,为用户提供最佳的路线规划、交通拥堵提示等服务。
应用场景:
1、城市交通管理:系统可应用于城市交通管理,通过智能交通控制和优化,改善交通拥堵、提高交通效率。可以在城市主要道路、交叉口等关键位置部署传感器和控制装置,实现交通流量的实时监测和控制。
2、高速公路管理:系统可用于高速公路的交通管理。通过部署传感器和摄像头,实时监测车辆流量、限速情况等,并提供交通事故预警和安全管理服务,提高高速公路的安全性和通行效率。
3、智能车辆导航和驾驶辅助:系统可与车载导航系统集成,为驾驶员提供智能导航和交通信息服务。通过实时的交通信息和路况提示,帮助驾驶员选择最佳路线,避免交通拥堵和事故风险。
需要注意的事项:
1、数据隐私和安全:在采集和处理交通数据时,需要保护用户的隐私和数据安全。合理采用数据加密、访问控制等措施,确保交通数据不被泄露或滥用。
2、系统可靠性和稳定性:智慧交通系统需要具备高可靠性和稳定性,以确保交通信息的准确性和实时性。系统的硬件设备和软件应具备良好的稳定性和容错性,以应对突发状况和故障。
3、法律法规和道路安全:在使用智慧交通系统时,需要遵守相关的法律法规和道路安全规定。系统设计和使用应符合交通法规,保障交通安全和秩序。
总结而言,Arduino智慧交通具有实时数据采集和处理、智能交通控制和优化、交通事故预警和安全管理、用户信息服务和智能导航等主要特点。它适用于城市交通管理、高速公路管理和智能车辆导航等场景。在使用此技术时,需要注意数据隐私和安全、系统可靠性和稳定性,以及法律法规和道路安全等事项。

Arduino智慧交通中使用V2I(Vehicle-to-Infrastructure)通信的智能交通系统是指利用Arduino平台和V2I通信技术实现车辆与基础设施之间的无线通信和数据交换。下面我将以专业的视角为您详细解释该智能交通系统的主要特点、应用场景以及需要注意的事项。
主要特点:
车辆与基础设施通信:V2I通信技术通过无线通信方式实现车辆与交通信号灯、路边传感器等基础设施之间的双向通信。车辆可以向基础设施发送请求、状态和传感器数据,同时基础设施可以向车辆发送交通信息和控制指令。实时数据交换:V2I通信系统可以实现车辆与基础设施之间的实时数据交换。例如,车辆可以通过V2I通信接收交通信号灯的状态信息,以便在交通拥堵时选择合适的路线。交通优化和安全性:V2I通信系统可以收集和分析大量车辆和交通基础设施的数据,从而实现交通流量优化和提高交通安全性。通过实时共享交通信息,可以减少交通事故和缓解交通拥堵。车辆定位和导航:V2I通信系统可以利用车辆和基础设施之间的通信,提供车辆定位和导航功能。车辆可以通过V2I通信获取准确的位置信息和导航指引,提高驾驶效率和路线规划准确性。应用场景:
交通信号优化:通过V2I通信,交通信号灯可以根据实时交通状况调整信号灯的配时,以提高交通流畅度和减少等待时间。交通拥堵监测和路线优化:通过V2I通信,车辆可以接收实时交通拥堵信息,并根据这些信息选择最佳路线,避免拥堵区域,提高路线效率。交通事故预警:V2I通信可以实时检测交通事故发生,并向周围车辆发送预警信息,以提醒驾驶员注意安全和采取相应措施。充电桩管理:V2I通信技术可以实现充电桩的远程监控和管理,包括实时状态监测、充电桩调度和支付等功能。需要注意的事项:
安全性和隐私保护:在设计V2I通信系统时,需要充分考虑通信的安全性和隐私保护。采用加密技术和身份验证机制,确保通信数据的保密性和完整性。通信可靠性:由于V2I通信涉及到车辆和基础设施之间的实时数据传输,通信的可靠性是关键因素。在设计系统时,需要考虑信号覆盖范围、抗干扰能力和通信链路的稳定性。标准和协议:为了实现车辆与不同基础设施之间的互操作性,需要遵循相关的V2I通信标准和协议,确保系统的兼容性和一致性。系统可扩展性:V2I通信系统应具备良好的可扩展性,可以根据需求灵活增加车辆和基础设施的数量,以适应不同规模和复杂度的智能交通系统。总结:
Arduino智慧交通中使用V2I通信的智能交通系统通过车辆和基础设施之间的无线通信和数据交换,实现了交通优化、安全性提升、车辆定位和导航等功能。该系统在交通信号优化、交通拥堵监测和路线优化、交通事故预警以及充电桩管理等应用场景具有广泛的应用前景。在设计和实施系统时,需要注意安全性、通信可靠性、标准和协议的遵循,以及系统的可扩展性。

下面是几个使用V2I通信的智能交通系统的实际运用程序参考代码案例:
1、车辆发送交通状态信息到基础设施:
#include <SPI.h>
#include <Ethernet.h>
#include <EthernetUdp.h>
byte mac[] = {0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED};
IPAddress ip(192, 168, 1, 177);
IPAddress serverIP(192, 168, 1, 100);
EthernetUDP udp;
struct TrafficStatus {
int vehicleId;
int speed;
int distance;
};
void setup() {
Ethernet.begin(mac, ip);
udp.begin(8888);
}
void loop() {
TrafficStatus status;
status.vehicleId = 1234;
status.speed = 50;
status.distance = 100;
udp.beginPacket(serverIP, 8888);
udp.write((byte*)&status, sizeof(status));
udp.endPacket();
delay(1000);
}要点解读:
引入Ethernet和EthernetUdp库。
创建一个EthernetUDP对象和IP地址对象。
在setup()函数中,初始化以太网和UDP。
在loop()函数中,创建一个TrafficStatus结构体对象,并填充交通状态信息。
使用UDP协议将交通状态信息发送给基础设施。
使用delay()函数控制发送频率。
2、基础设施接收车辆发送的交通状态信息:
#include <SPI.h>
#include <Ethernet.h>
#include <EthernetUdp.h>
byte mac[] = {0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED};
IPAddress ip(192, 168, 1, 100);
IPAddress clientIP(192, 168, 1, 177);
EthernetUDP udp;
struct TrafficStatus {
int vehicleId;
int speed;
int distance;
};
void setup() {
Ethernet.begin(mac, ip);
udp.begin(8888);
}
void loop() {
int packetSize = udp.parsePacket();
if (packetSize) {
TrafficStatus status;
udp.read((byte*)&status, sizeof(status));
Serial.print("Received Traffic Status from Vehicle ID: ");
Serial.print(status.vehicleId);
Serial.print(", Speed: ");
Serial.print(status.speed);
Serial.print(", Distance: ");
Serial.println(status.distance);
udp.beginPacket(clientIP, 8888);
udp.write((byte*)&status, sizeof(status));
udp.endPacket();
}
delay(1000);
}要点解读:
引入Ethernet和EthernetUdp库。
创建一个EthernetUDP对象和IP地址对象。
在setup()函数中,初始化以太网和UDP。
在loop()函数中,检查是否有数据包到达。
如果有数据包到达,创建一个TrafficStatus结构体对象,并使用UDP协议读取交通状态信息。
使用串口(Serial)打印接收到的交通状态信息。
使用UDP协议将交通状态信息发送给车辆。
使用delay()函数控制接收频率。
3、基础设施发送指令给车辆:
#include <SPI.h>
#include <Ethernet.h>
#include <EthernetUdp.h>
byte mac[] = {0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED};
IPAddress ip(192, 168, 1, 100);
IPAddress clientIP(192, 168, 1, 177);
EthernetUDP udp;
struct Command {
int vehicleId;
int action;
};
void setup() {
Ethernet.begin(mac, ip);
udp.begin(8888);
}
void loop() {
Command command;
command.vehicleId = 1234;
command.action = 1;
udp.beginPacket(clientIP, 8888);
udp.write((byte*)&command, sizeof(command));
udp.endPacket();
delay(1000);
}要点解读:
引入Ethernet和EthernetUdp库。
创建一个EthernetUDP对象和IP地址对象。
在setup()函数中,初始化以太网和UDP。
在loop()函数中,创建一个Command结构体对象,并填充车辆指令信息。
使用UDP协议将车辆指令发送给车辆。
使用delay()函数控制发送频率。
这些示例代码演示了使用V2I通信的智能交通系统的实际运用程序。通过以太网和UDP协议,车辆和基础设施之间可以进行双向通信。
关键的要点如下:
车辆发送交通状态信息到基础设施:
创建EthernetUDP对象和IP地址对象。
初始化以太网和UDP。
创建一个结构体对象,并填充交通状态信息。
使用UDP协议将交通状态信息发送给基础设施。
基础设施接收车辆发送的交通状态信息:
创建EthernetUDP对象和IP地址对象。
初始化以太网和UDP。
检查是否有数据包到达。
创建一个结构体对象,并使用UDP协议读取交通状态信息。
使用串口(Serial)打印接收到的交通状态信息。
使用UDP协议将交通状态信息发送给车辆。
基础设施发送指令给车辆:
创建EthernetUDP对象和IP地址对象。
初始化以太网和UDP。
创建一个结构体对象,并填充车辆指令信息。
使用UDP协议将车辆指令发送给车辆。
这些示例代码可以作为使用V2I通信的智能交通系统的起点,并根据具体需求进行进一步开发和扩展。
当涉及到使用V2I(车辆到基础设施)通信的智能交通系统时,Arduino可以用于实现与交通设备(如交通信号灯、路边传感器等)的通信。以下是几个实际运用的程序参考代码案例,涉及到V2I通信的智能交通系统:
4、交通信号灯控制器
#include <SPI.h>
#include <RF24.h>
RF24 radio(9, 10); // 使用9号和10号引脚进行RF24通信
const uint64_t trafficLightPipe = 0xE8E8F0F0E1LL; // 交通信号灯管道地址
void setup() {
Serial.begin(9600);
radio.begin();
radio.openWritingPipe(trafficLightPipe); // 设置写入管道为交通信号灯管道
}
void loop() {
// 接收来自车辆的请求
if (radio.available()) {
int request;
radio.read(&request, sizeof(request)); // 读取请求
processRequest(request); // 处理请求
}
// 控制交通信号灯状态
int trafficLightState = getTrafficLightState(); // 获取交通信号灯状态
radio.stopListening();
radio.write(&trafficLightState, sizeof(trafficLightState)); // 发送交通信号灯状态给车辆
radio.startListening();
delay(1000);
}
void processRequest(int request) {
// 处理来自车辆的请求的逻辑
}
int getTrafficLightState() {
// 获取交通信号灯状态的逻辑
}要点解读:
这个程序实现了一个交通信号灯控制器,使用RF24库进行与车辆之间的通信。
在setup()函数中,设置串口通信和RF24的管道地址。
使用radio.openWritingPipe()函数设置写入管道为交通信号灯管道。
在loop()函数中,首先检查是否有来自车辆的请求。如果有,通过radio.read()函数读取请求,并调用processRequest()函数进行处理。
然后获取交通信号灯的状态,使用radio.write()函数将状态发送给车辆。
5、路边传感器数据传输
#include <SPI.h>
#include <RF24.h>
RF24 radio(9, 10); // 使用9号和10号引脚进行RF24通信
const uint64_t sensorPipe = 0xE8E8F0F0E1LL; // 传感器管道地址
void setup() {
Serial.begin(9600);
radio.begin();
radio.openWritingPipe(sensorPipe); // 设置写入管道为传感器管道
}
void loop() {
float sensorData = readSensorData(); // 读取传感器数据
radio.write(&sensorData, sizeof(sensorData)); // 发送传感器数据给基础设施
delay(1000);
}
float readSensorData() {
// 读取传感器数据的逻辑
}要点解读:
这个程序实现了一个路边传感器,使用RF24库进行与基础设施之间的通信。
在setup()函数中,设置串口通信和RF24的管道地址。
使用radio.openWritingPipe()函数设置写入管道为传感器管道。
在loop()函数中,读取传感器数据,并使用radio.write()函数将数据发送给基础设施。
注意,以上案例只是为了拓展思路,仅供参考。它们可能有错误、不适用或者无法编译。您的硬件平台、使用场景和Arduino版本可能影响使用方法的选择。实际编程时,您要根据自己的硬件配置、使用场景和具体需求进行调整,并多次实际测试。您还要正确连接硬件,了解所用传感器和设备的规范和特性。涉及硬件操作的代码,您要在使用前确认引脚和电平等参数的正确性和安全性。



 他的勋章
他的勋章

花生编程2024.05.02
厉害
三春牛-创客2024.05.01
不错