 返回首页
返回首页
 回到顶部
回到顶部
37款传感器与模块的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手试试多做实验,不管成功与否,都会记录下来——小小的进步或是搞不掂的问题,希望能够抛砖引玉。
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
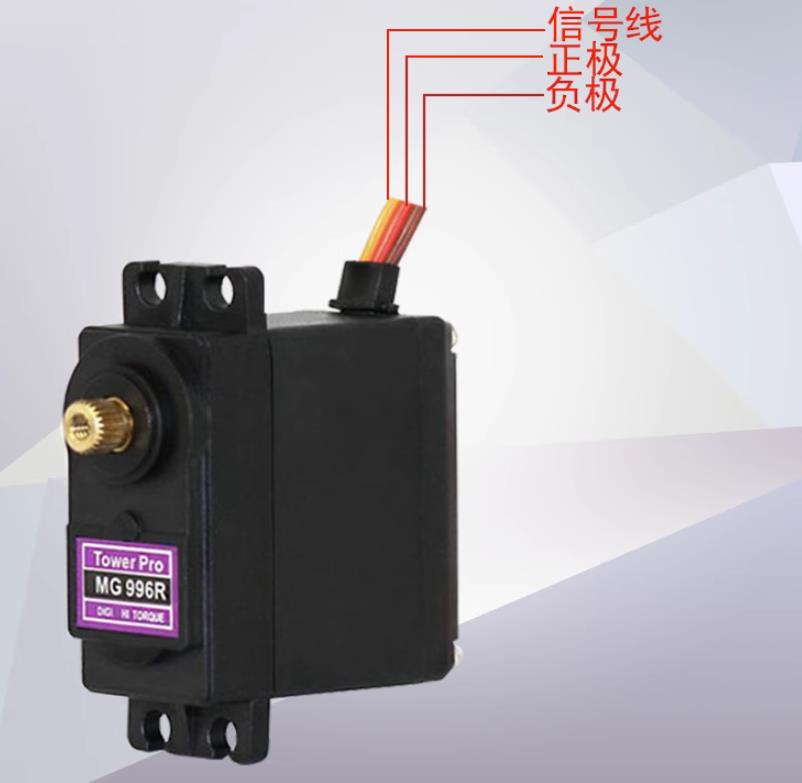
实验一百六十九:360° MG996R舵机/机器人/机械臂/航模/车模 55克模型大扭力金属齿轮

知识点:舵机是什么?
伺服电机通常被称为舵机,它是一种带有输出轴的小装置。当我们向伺服器发送一个控制信号时,输出轴就可以转到特定的位置。只要控制信号持续不变,伺服机构就会保持轴的角度位置不改变。如果控制信号发生变化,输出轴的位置也会相应发生变化。
舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。经由电路板上的IC 判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。适用于那些需要角度不断变化并可以保持的控制系统。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。一般舵机旋转的角度范围是0 度到180 度。
日常生活中,舵机常被用于遥控飞机、遥控汽车、机器人等领域。舵机在机器人领域非常有用。因为舵机有内置的控制电路,它们的尺寸虽然很小,但输出力够大。像Futaba S-148这样的标准舵机能提供 0.3牛/米的扭矩,相对于它的外形大小来说这已经足够强大了。同时,舵机消耗的能量与机械负荷成正比。因此,一个轻载的舵机系统不会消耗太多的能量。

舵机工作原理
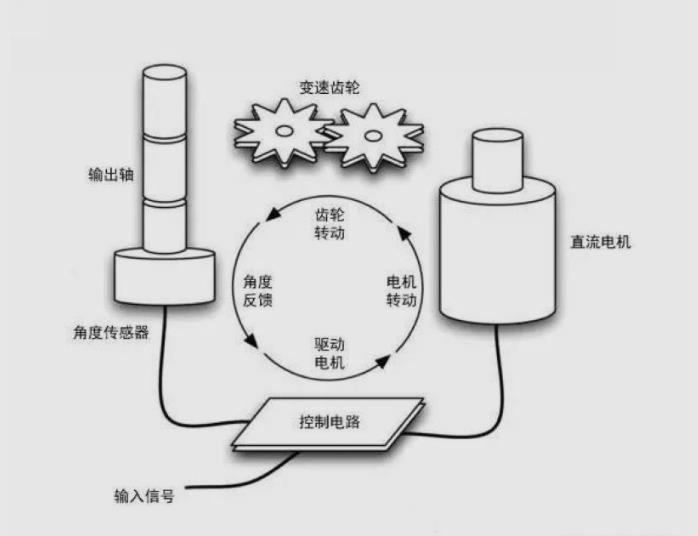
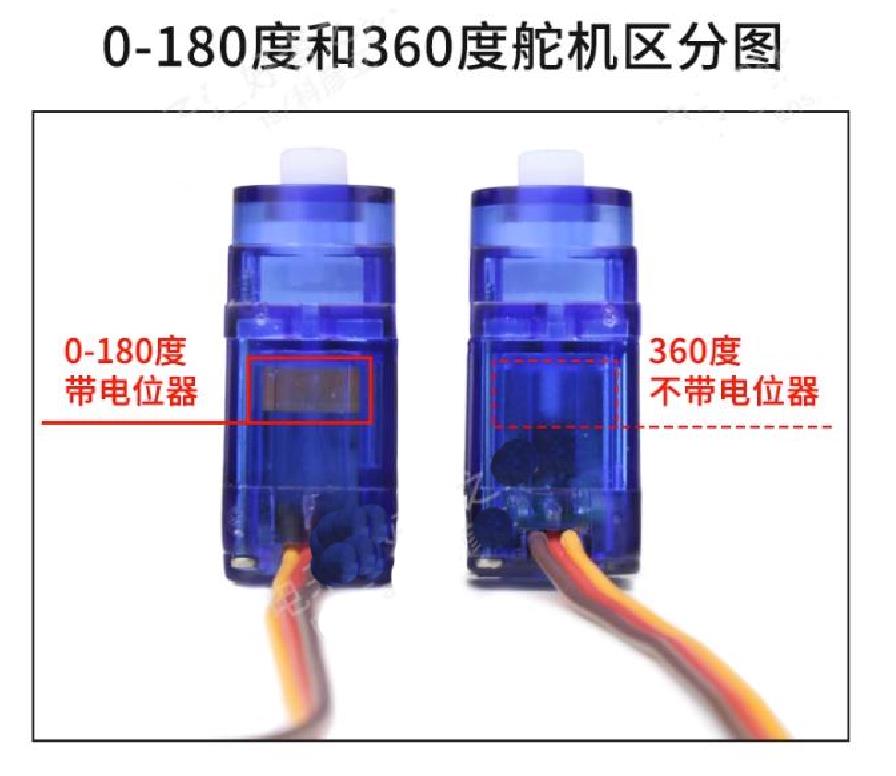
舵机安装了一个电位器(或其它角度传感器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度。这样的直流电机控制方式叫闭环控制,所以舵机更准确的说是伺服马达,英文 servo.舵机组成: 舵盘、 减速齿轮、 位置反馈电位计、直流电机、 控制电路板等。控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘 转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到目标停止。其工作流程为:控制信号→控制电路板→电机转动→齿轮组减速→舵盘转动→位置反馈电位计→控制电路板反馈。
舵机的闭环检测机制
关于舵机的精准位置控制,存在以下如下图的闭环控制机制。即:位置检测器(角度传感器)是它的输入传感器,舵机转动的位置变化,位置检测器的电阻值就会跟着变化。通过控制电路读取该电阻值的大小,就能根据阻值适当调整电机的速度和方向,使电机向指定角度旋转。从而实现了舵机的精确转动的控制。
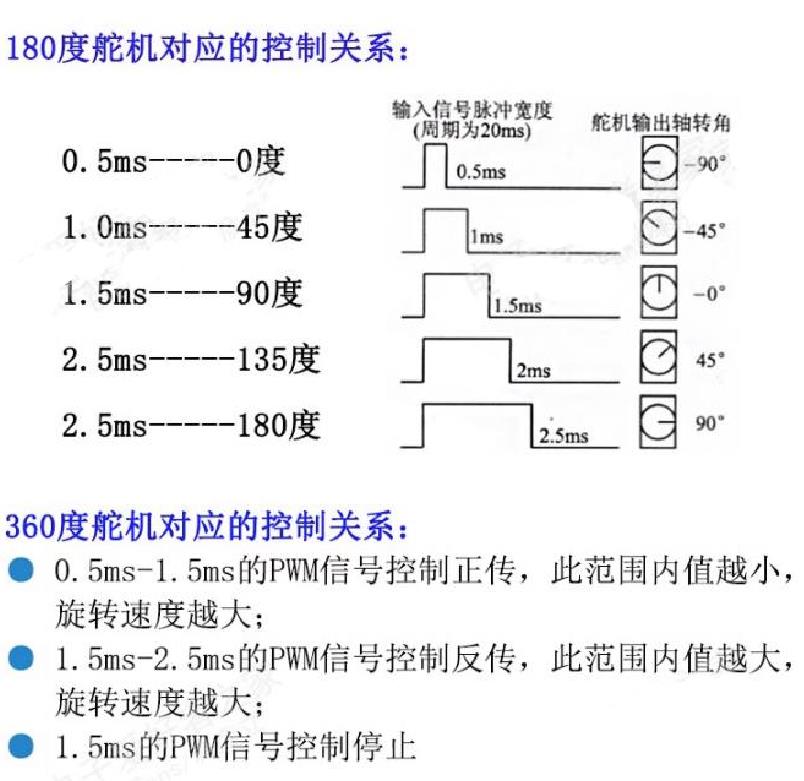
舵机的控制信号
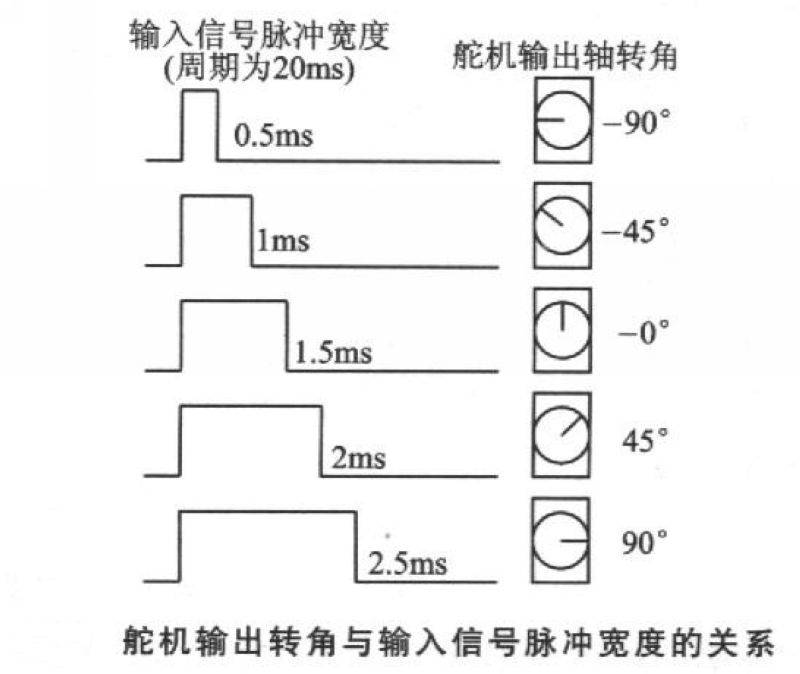
为周期是20ms的脉宽调制(PWM)信号,其中脉冲宽度从0.5ms-2.5ms,相对应舵盘的位置为0-180度,呈线性变化。也就是说,给它提供一定的脉宽,它的输出轴就会保持在一个相对应的角度上,无论外界转矩怎样改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应的位置上。舵机内部有一个基准电路,产生周期20ms,宽度1.5ms的基准信号,有一个比较器,将外加信号与基准信号相比较,判断出方向和大小,从而产生电机的转动信号。由此可见,舵机是一种位置伺服的驱动器,转动范围不能超过180度,适用于那些需要角度不断变化并可以保持的驱动当中。比方说机器人的关节、飞机的舵面等。








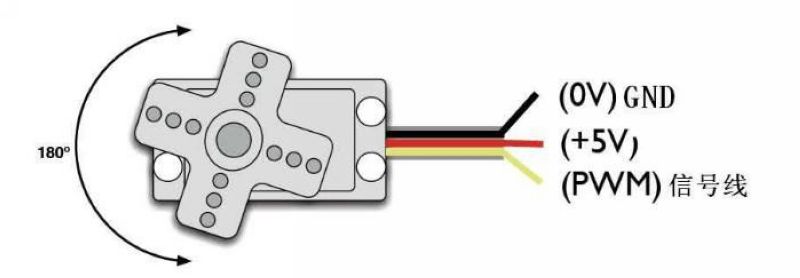

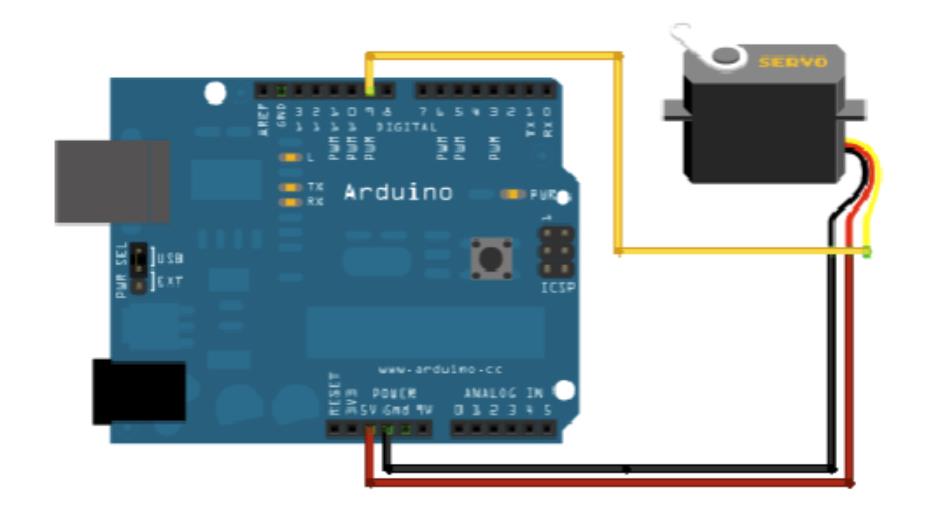
Arduino实验接线示意图
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百六十九:360° MG996R舵机/机器人/机械臂/航模/车模 55克模型大扭力金属齿轮
项目:快速正向转动3秒,停止1秒,慢速反向转动3秒
Arduino参考开源代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
项目:快速正向转动3秒,停止1秒,慢速反向转动3秒
*/
#include <Servo.h>
Servo myservo;
void setup() {
myservo.attach(9);
}
void loop() {
myservo.write(50); //设定一个正转速度(由快到慢0-89)
delay(3000); //它会在这3秒内一直转动
myservo.write(90); //发送停止命令
delay(1000); //等待一会
myservo.write(180); //设定一个反转速度(由慢到快91-180)
delay(3000); //它会在这3秒内一直转动
myservo.write(90); //发送停止命令
delay(1000); // 等待一会
}Arduino实验场景图



 他的勋章
他的勋章

9mm2023.07.25
666