 返回首页
返回首页
 回到顶部
回到顶部
37款传感器与执行器的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止这37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手尝试系列实验,不管成功(程序走通)与否,都会记录下来—小小的进步或是搞不掂的问题,希望能够抛砖引玉。
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
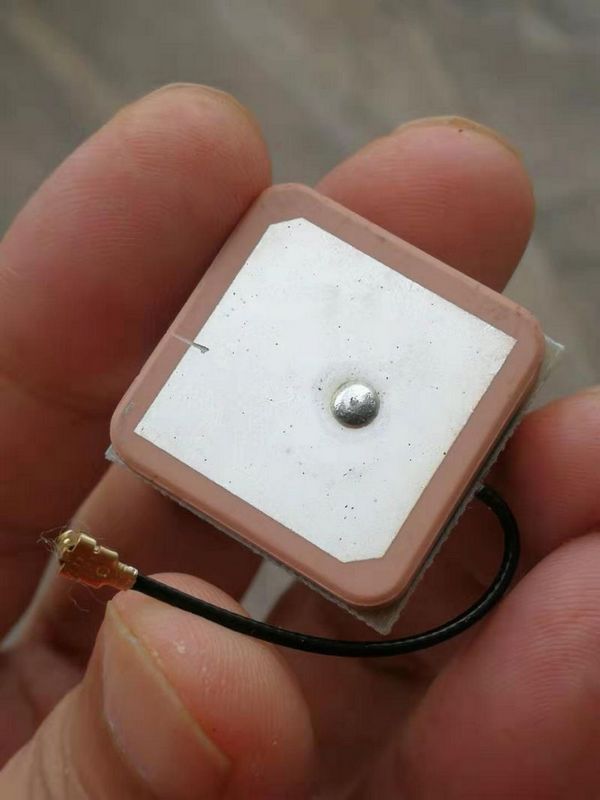
实验七十四:GY-NEO-6MV2新款飞控GPS模块 (带陶瓷有源天线)

Arduino实验接线示意图


【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验七十四:GY-NEO-6MV2新款飞控GPS模块 (带陶瓷有源天线)
程序三:使用TinyGPS库解码GPS数据
Arduino参考开源代码
代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
程序三:使用TinyGPS库解码GPS数据
*/
#include <SoftwareSerial.h>//导入驱动库
#include <TinyGPS.h>
TinyGPS gps;//初始化
SoftwareSerial ss(9, 8);//设置软串口为D9\D8
void setup() {
Serial.begin(9600);
ss.begin(9600);
Serial.print("简单的 TinyGPS 库 v. ");
Serial.println(TinyGPS::library_version());
Serial.println("NEO-6M准备就绪!");
Serial.println();
}
void loop() {
bool newData = false;
unsigned long chars;
unsigned short sentences, failed;
// 一秒钟我们解析 GPS 数据并报告一些关键值
for (unsigned long start = millis(); millis() - start < 1000;){
while (ss.available()){
char c = ss.read();
// Serial.write(c); // 如果您想查看 GPS 数据流,请取消注释此行
if (gps.encode(c)) // 新的有效数据进来了吗?
newData = true;
}
}
if (newData){
float flat, flon;
unsigned long age;
gps.f_get_position(&flat, &flon, &age);
Serial.print("经度=");
Serial.print(flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flat, 6);
Serial.print(" 纬度=");
Serial.print(flon == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flon, 6);
Serial.print(" 卫星数=");
Serial.print(gps.satellites() == TinyGPS::GPS_INVALID_SATELLITES ? 0 : gps.satellites());
Serial.print(" 接收=");
Serial.print(gps.hdop() == TinyGPS::GPS_INVALID_HDOP ? 0 : gps.hdop());
}
gps.stats(&chars, &sentences, &failed);
Serial.print(" 字符=");
Serial.print(chars);
Serial.print(" 句子=");
Serial.print(sentences);
Serial.print(" 失败=");
Serial.println(failed);
if (chars == 0)
Serial.println("** 没有从 GPS 接收到数据:检查接线 **");
}实验串口返回情况

程序四:使用TinyGPS库解码GPS数据之二
(1)Arduino参考开源代码
代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
程序四:使用TinyGPS库解码GPS数据之二
*/
#include <SoftwareSerial.h>//导入驱动库
#include <TinyGPS.h>
TinyGPS gps;//初始化
SoftwareSerial ss(9, 8);//设置软串口为D9\D8
static void smartdelay(unsigned long ms);
static void print_float(float val, float invalid, int len, int prec);
static void print_int(unsigned long val, unsigned long invalid, int len);
static void print_date(TinyGPS &gps);
static void print_str(const char *str, int len);
void setup() {
Serial.begin(9600);
Serial.print("简单的 TinyGPS 库 v. ");
Serial.println(TinyGPS::library_version());
Serial.println("NEO-6M准备就绪!");
Serial.println();
Serial.println("Sats HDOP Latitude Longitude Fix Date Time Date Alt Course Speed Card Distance Course Card Chars Sentences Checksum");
Serial.println(" (deg) (deg) Age Age (m) --- from GPS ---- ---- to London ---- RX RX Fail");
Serial.println("-------------------------------------------------------------------------------------------------------------------------------------");
ss.begin(9600);
}
void loop() {
float flat, flon;
unsigned long age, date, time, chars = 0;
unsigned short sentences = 0, failed = 0;
static const double LONDON_LAT = 51.508131, LONDON_LON = -0.128002;//静态常量
print_int(gps.satellites(), TinyGPS::GPS_INVALID_SATELLITES, 5);
print_int(gps.hdop(), TinyGPS::GPS_INVALID_HDOP, 5);
gps.f_get_position(&flat, &flon, &age);
print_float(flat, TinyGPS::GPS_INVALID_F_ANGLE, 10, 6);
print_float(flon, TinyGPS::GPS_INVALID_F_ANGLE, 11, 6);
print_int(age, TinyGPS::GPS_INVALID_AGE, 5);
print_date(gps);
print_float(gps.f_altitude(), TinyGPS::GPS_INVALID_F_ALTITUDE, 7, 2);
print_float(gps.f_course(), TinyGPS::GPS_INVALID_F_ANGLE, 7, 2);
print_float(gps.f_speed_kmph(), TinyGPS::GPS_INVALID_F_SPEED, 6, 2);
print_str(gps.f_course() == TinyGPS::GPS_INVALID_F_ANGLE ? "*** " : TinyGPS::cardinal(gps.f_course()), 6);
print_int(flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0xFFFFFFFF : (unsigned long)TinyGPS::distance_between(flat, flon, LONDON_LAT, LONDON_LON) / 1000, 0xFFFFFFFF, 9);
print_float(flat == TinyGPS::GPS_INVALID_F_ANGLE ? TinyGPS::GPS_INVALID_F_ANGLE : TinyGPS::course_to(flat, flon, LONDON_LAT, LONDON_LON), TinyGPS::GPS_INVALID_F_ANGLE, 7, 2);
print_str(flat == TinyGPS::GPS_INVALID_F_ANGLE ? "*** " : TinyGPS::cardinal(TinyGPS::course_to(flat, flon, LONDON_LAT, LONDON_LON)), 6);
gps.stats(&chars, &sentences, &failed);
print_int(chars, 0xFFFFFFFF, 6);
print_int(sentences, 0xFFFFFFFF, 10);
print_int(failed, 0xFFFFFFFF, 9);
Serial.println();
smartdelay(1000);
}
static void smartdelay(unsigned long ms)
{
unsigned long start = millis();
do
{
while (ss.available())
gps.encode(ss.read());
} while (millis() - start < ms);
}
static void print_float(float val, float invalid, int len, int prec)
{
if (val == invalid)
{
while (len-- > 1)
Serial.print('*');
Serial.print(' ');
}
else
{
Serial.print(val, prec);
int vi = abs((int)val);
int flen = prec + (val < 0.0 ? 2 : 1); // . 和 -
flen += vi >= 1000 ? 4 : vi >= 100 ? 3 : vi >= 10 ? 2 : 1;
for (int i = flen; i < len; ++i)
Serial.print(' ');
}
smartdelay(0);
}
static void print_int(unsigned long val, unsigned long invalid, int len)
{
char sz[32];
if (val == invalid)
strcpy(sz, "*******");
else
sprintf(sz, "%ld", val);
sz[len] = 0;
for (int i = strlen(sz); i < len; ++i)
sz[i] = ' ';
if (len > 0)
sz[len - 1] = ' ';
Serial.print(sz);
smartdelay(0);
}
static void print_date(TinyGPS &gps)
{
int year;
byte month, day, hour, minute, second, hundredths;
unsigned long age;
gps.crack_datetime(&year, &month, &day, &hour, &minute, &second, &hundredths, &age);
if (age == TinyGPS::GPS_INVALID_AGE)
Serial.print("********** ******** ");
else
{
char sz[32];
sprintf(sz, "%02d/%02d/%02d %02d:%02d:%02d ",
month, day, year, hour, minute, second);
Serial.print(sz);//月、日、年、时、分、秒
}
print_int(age, TinyGPS::GPS_INVALID_AGE, 5);
smartdelay(0);
}
static void print_str(const char *str, int len)
{
int slen = strlen(str);
for (int i = 0; i < len; ++i)
Serial.print(i < slen ? str[i] : ' ');
smartdelay(0);
}(2)实验串口返回情况

实验开源图形编程(Mind+、编玩边学)

程序五:使用TinyGPS++库测量经纬度和卫星数量
(1)Arduino参考开源代码
代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
程序五:使用TinyGPS++库测量经纬度和卫星数量
*/
#include <TinyGPS++.h>//导入驱动库
#include <SoftwareSerial.h>
static const int RXPin = 9, TXPin = 8; //设置软串口为D9\D8
static const uint32_t GPSBaud = 9600;
TinyGPSPlus gps; //TinyGPS 对象
// 与 GPS 设备的串行连接
SoftwareSerial mySerial(RXPin, TXPin);
void setup() {
Serial.begin(9600);
mySerial.begin(GPSBaud);
}
void loop() {
while (mySerial.available() > 0)
{
gps.encode(mySerial.read());
if (gps.location.isUpdated())
{
Serial.print("纬度= ");
Serial.print(gps.location.lat(), 6); //获取纬度
Serial.print(" 经度= ");
Serial.println(gps.location.lng(), 6); //获取经度
// 正在使用的卫星数量
Serial.print("正在使用的 os 卫星数 = ");
Serial.println(gps.satellites.value());
}
}
}(2)实验串口返回情况

程序六:静态解码NMEA数据流的示例
(1)Arduino参考开源代码
代码
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
程序六:静态解码NMEA数据流的示例
*/
#include <TinyGPS++.h>//导入驱动库
#include <TinyGPSPlus.h>
// 一个示例 NMEA 流。
const char *gpsStream =
"$GPRMC,045103.000,A,3014.1984,N,09749.2872,W,0.67,161.46,030913,,,A*7C\r\n"
"$GPGGA,045104.000,3014.1985,N,09749.2873,W,1,09,1.2,211.6,M,-22.5,M,,0000*62\r\n"
"$GPRMC,045200.000,A,3014.3820,N,09748.9514,W,36.88,65.02,030913,,,A*77\r\n"
"$GPGGA,045201.000,3014.3864,N,09748.9411,W,1,10,1.2,200.8,M,-22.5,M,,0000*6C\r\n"
"$GPRMC,045251.000,A,3014.4275,N,09749.0626,W,0.51,217.94,030913,,,A*7D\r\n"
"$GPGGA,045252.000,3014.4273,N,09749.0628,W,1,09,1.3,206.9,M,-22.5,M,,0000*6F\r\n";
// TinyGPSPlus 对象
TinyGPSPlus gps;
void setup(){
Serial.begin(115200);
Serial.println(F("BasicExample.ino"));
Serial.println(F("TinyGPSPlus 的基本演示(无需设备)"));
Serial.print(F("测试 TinyGPSPlus 库 v. ")); Serial.println(TinyGPSPlus::libraryVersion());
Serial.println(F("准备就绪"));
Serial.println();
while (*gpsStream)
if (gps.encode(*gpsStream++))
displayInfo();
Serial.println();
Serial.println(F("完成"));
}
void loop(){
}
void displayInfo()
{
Serial.print(F("Location: "));
if (gps.location.isValid())
{
Serial.print(gps.location.lat(), 6);
Serial.print(F(","));
Serial.print(gps.location.lng(), 6);
}
else
{
Serial.print(F("INVALID"));
}
Serial.print(F(" Date/Time: "));
if (gps.date.isValid())
{
Serial.print(gps.date.month());
Serial.print(F("/"));
Serial.print(gps.date.day());
Serial.print(F("/"));
Serial.print(gps.date.year());
}
else
{
Serial.print(F("INVALID"));
}
Serial.print(F(" "));
if (gps.time.isValid())
{
if (gps.time.hour() < 10) Serial.print(F("0"));
Serial.print(gps.time.hour());
Serial.print(F(":"));
if (gps.time.minute() < 10) Serial.print(F("0"));
Serial.print(gps.time.minute());
Serial.print(F(":"));
if (gps.time.second() < 10) Serial.print(F("0"));
Serial.print(gps.time.second());
Serial.print(F("."));
if (gps.time.centisecond() < 10) Serial.print(F("0"));
Serial.print(gps.time.centisecond());
}
else
{
Serial.print(F("INVALID"));
}
Serial.println();
}实验串口返回情况



 他的勋章
他的勋章

9mm2023.08.09
666